油电混合果园自动导航车控制器硬件在环仿真平台设计与应用
吴应新1( ), 吴剑桥2, 杨雨航1, 李沐桐2, 甘玲3, 贡亮1(), 刘成良1
), 吴剑桥2, 杨雨航1, 李沐桐2, 甘玲3, 贡亮1(), 刘成良1
), 吴剑桥2, 杨雨航1, 李沐桐2, 甘玲3, 贡亮1(), 刘成良1
Design and Application of Hardware-in-the-Loop Simulation Platform for AGV Controller in Hybrid Orchard
Yingxin WU1(), Jianqiao WU2, Yuhang YANG1, Mutong LI2, Ling GAN3, Liang GONG1(), Chengliang LIU1
), Jianqiao WU2, Yuhang YANG1, Mutong LI2, Ling GAN3, Liang GONG1(), Chengliang LIU1
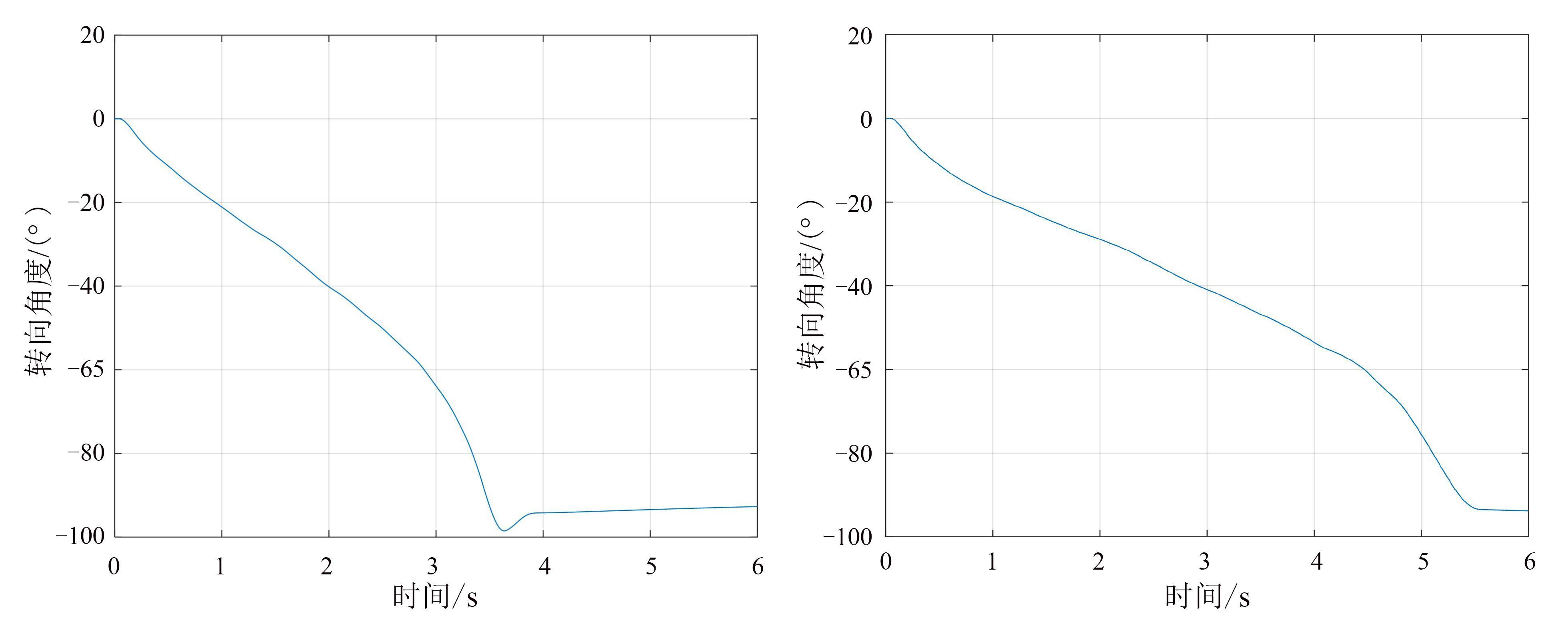
图18. 90°转向工况的小车仿真结果
(a) 串级PID控制仿真结果 (b)模糊控制仿真结果
Fig. 18. Simulation results of the vehicle under 90 ° steering condition