天然橡胶割胶机器人视觉伺服控制方法与割胶试验
周航( ), 张顺路, 翟毅豪, 王松, 张春龙(), 张俊雄, 李伟
), 张顺路, 翟毅豪, 王松, 张春龙(), 张俊雄, 李伟
), 张顺路, 翟毅豪, 王松, 张春龙(), 张俊雄, 李伟
Vision Servo Control Method and Tapping Experiment of Natural Rubber Tapping Robot
Hang ZHOU(), Shunlu ZHANG, Yihao ZHAI, Song WANG, Chunlong ZHANG(), Junxiong ZHANG, Wei LI
), Shunlu ZHANG, Yihao ZHAI, Song WANG, Chunlong ZHANG(), Junxiong ZHANG, Wei LI
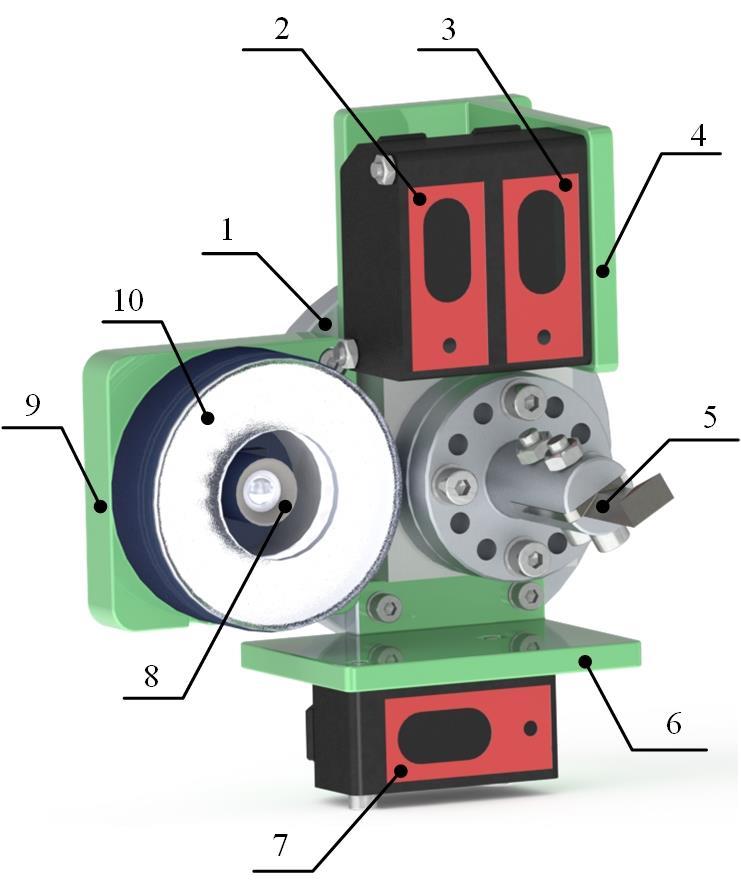
图6. 割胶机器人末端执行器
Fig. 6. End-effector of the rubber tapping robot