轮式谷物联合收获机视觉导航系统设计与试验
丁幼春1,2( ), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
Visual Navigation System for Wheel-Type Grain Combine Harvester
Youchun DING1,2(), Xuping WANG1,2, Jingye PENG1,2, Zhongzhou XIA1,2
), Xuping WANG1,2, Jingye PENG1,2, Zhongzhou XIA1,2
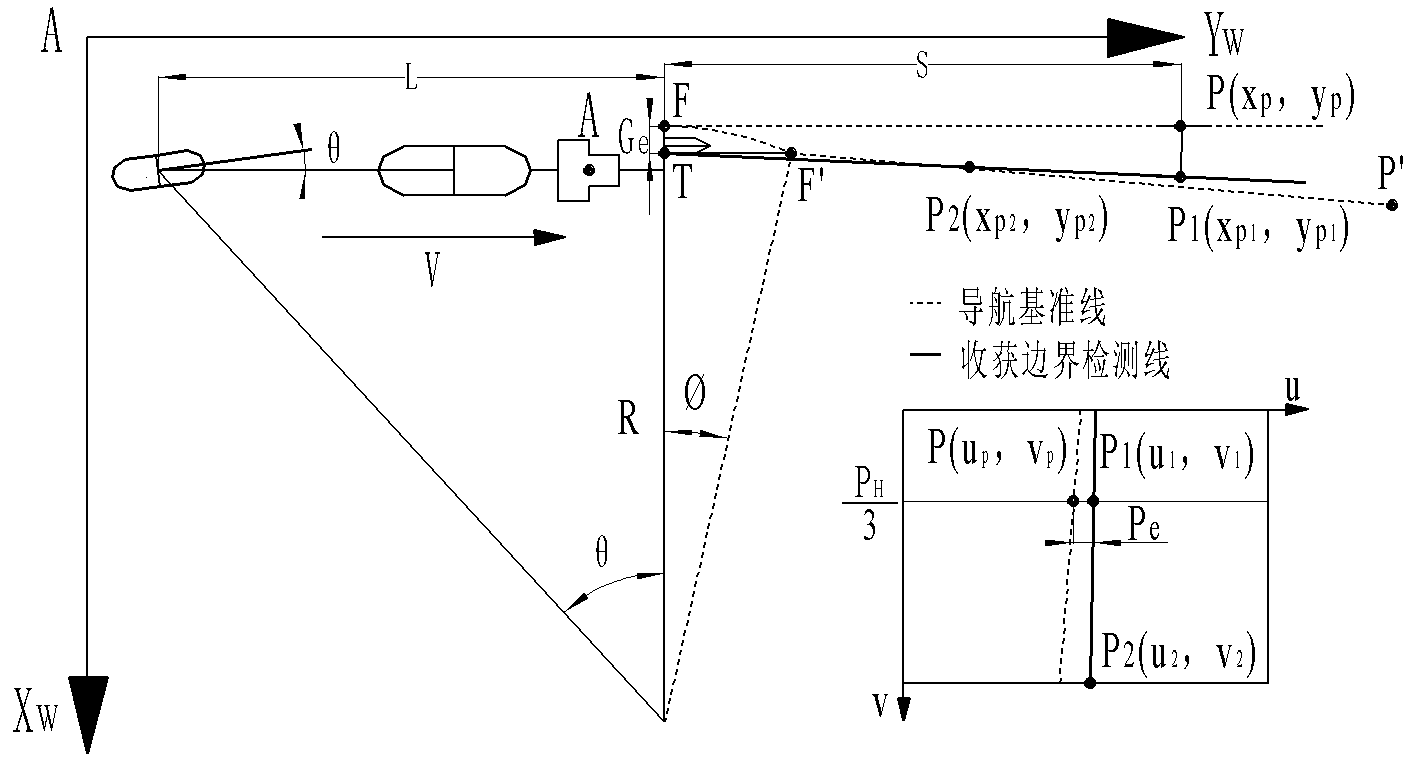
图8. 联合收获机二轮车运动学模型
Fig. 8. Kinematics model of two wheeled vehicle of combine harvester