轮式谷物联合收获机视觉导航系统设计与试验
丁幼春1,2( ), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
), 王绪坪1,2, 彭靖叶1,2, 夏中州1,2
Visual Navigation System for Wheel-Type Grain Combine Harvester
Youchun DING1,2(), Xuping WANG1,2, Jingye PENG1,2, Zhongzhou XIA1,2
), Xuping WANG1,2, Jingye PENG1,2, Zhongzhou XIA1,2
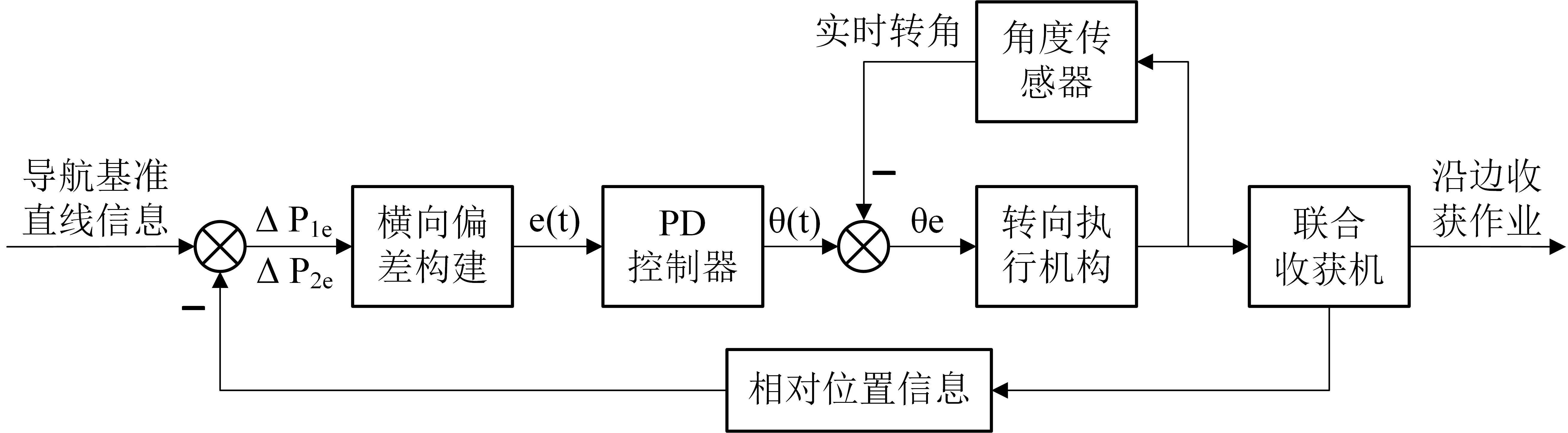
图9. 视觉导航控制策略框图
Fig. 9. Block diagram of visual navigation control strategy