植保无人机施药数值建模关键技术与验证方法研究进展
Research Progress of Key Technologies and Verification Methods of Numerical Modeling for Plant Protection Unmanned Aerial Vehicle Application
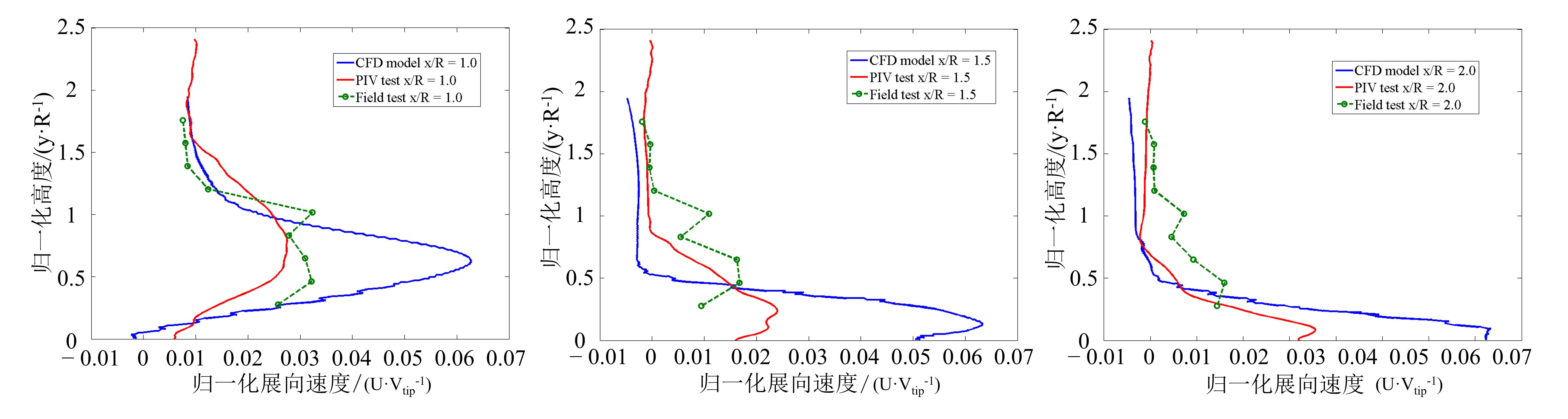
(a) x/R=1.0 (b) x/R=1.5 (c) x/R=2.0
植保无人机施药数值建模关键技术与验证方法研究进展 |
| 唐青, 张瑞瑞, 陈立平, 李龙龙, 徐刚 |
|
Research Progress of Key Technologies and Verification Methods of Numerical Modeling for Plant Protection Unmanned Aerial Vehicle Application |
| TANG Qing, ZHANG Ruirui, CHEN Liping, LI Longlong, XU Gang |
| 图4 植保无人机悬停状态下各展向截面速度剖面模拟结果与田间实验及室内PIV实验对比 (a) x/R=1.0 (b) x/R=1.5 (c) x/R=2.0 |
| Fig. 4 Comparison of the simulation results of the speed of each spanwise section profile of the plant protection unmanned aerial vehicle in the hovering state with the field test and the indoor PIV test |
|
|