高地隙四轮独立驱动喷雾机路径跟踪模型预测控制
Path Following Model Predictive Control of Four Wheel Independent Drive High Ground Clearance Sprayer
高地隙四轮独立驱动喷雾机路径跟踪模型预测控制 |
| 王子杰, 刘国海, 张多, 沈跃, 姚震, 张贺 |
|
Path Following Model Predictive Control of Four Wheel Independent Drive High Ground Clearance Sprayer |
| WANG Zijie, LIU Guohai, ZHANG Duo, SHEN Yue, YAO Zhen, ZHANG He |
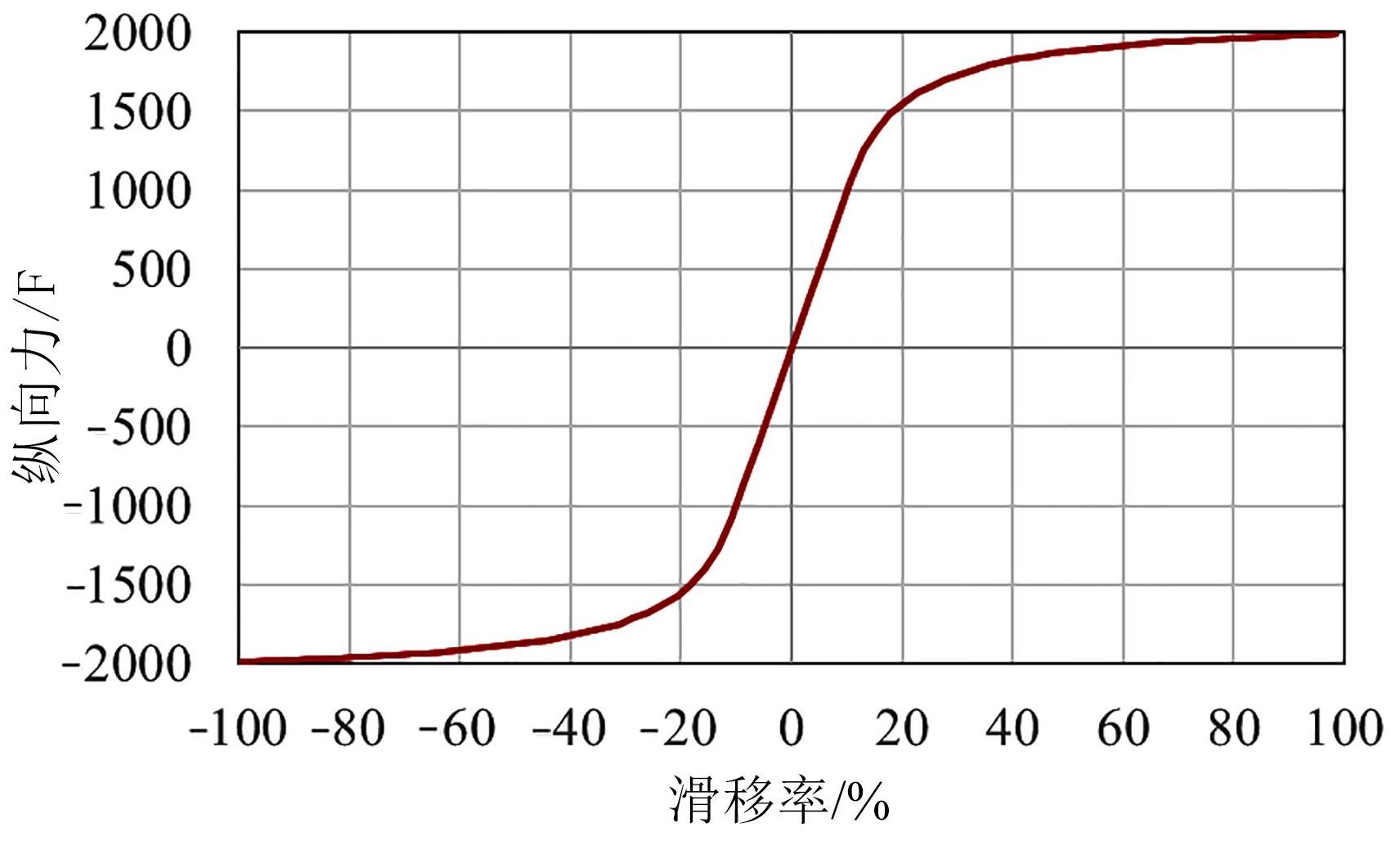
| 图5 喷雾机驱动轮纵向力与滑移率关系 |
| Fig. 5 Relationship between longitudinal force and slip |
|
|