



1 引言
机器视觉是一种自动非入侵式且经济的监控方法。在以往研究中,已有学者通过利用机器视觉监控了鱼群的摄食行为和饲料消耗程度,进而评估了鱼群摄食情况[9,10]。机器视觉中的帧间差法是常用的获取图像差异的方法,基于此,许多鱼群摄食行为的量化指标被提取出来[11]。例如,Liu等[12]提出的鱼群摄食活性量化指标与人工观测法的线性相关系数可达0.92。在此基础上,Ye等[13]采用光流提取群体的行为特征(速度和转角),并利用胃肠饱满指数和组合熵评估鱼群的摄食强度[14]。赵建团队还提出了一种利用改进动能模型的鱼群摄食强度评估方法,在探测聚集和离散行为方面具有较高的成功率[15,16]。还有学者通过计算摄像机视野范围内鱼群数量,实现摄食激烈程度的量化[17]。以上研究表明,利用机器视觉分析鱼群的摄食行为,进而评估其摄食强度为一种可行且有效的手段[18],为本研究提供了借鉴和基础。
实践证明,机器视觉非常适用于光照条件较好的场合,比如实验室、网箱、池塘等[19]。然而,在很多设施水产养殖现场都存在光照条件不足和不均匀的问题,导致采集到的大多数图像的噪声比较严重,且对比度低。而近红外在自然光照不足的时候仍能够取得较好的成像效果[20,21],并且其成本较低、开发相对简单,也不会干扰鱼的正常生长[22],非常适合用于在光照条件不足的条件下鱼类摄食强度的评估。已经有研究将近红外系统用于鱼类的运动轨迹跟踪并取得了较好的效果[22]。Zhou等[23]利用Delaunay三角剖分评估了低密度养殖条件下的鱼类摄食行为变化。而对于高密度养殖鱼类,可以通过探测鱼类活动引起的水花变化来评估其摄食强度[13]。但是对底栖鱼或小个体鱼类,其摄食活动不足以搅动水面形成水花,方法的应用范围受限制。
在模拟商业化水产养殖现场的基础上,本研究以实现对鱼类食欲的自动、客观评估为目的,提出了一种基于近红外机器视觉的鱼类摄食强度评估方法,利用图像纹理描述了因摄食活动引起的图像变化,利用支持向量机(Support Vector Machine,SVM)构建了摄食活动图像的分类模型,实现了对摄食强度的评估,并比较了模型的性能表现,为实现鱼类投喂的实时反馈和自动控制提供了有价值的信息。
2 材料与方法
2.1 试验系统及对象
本试验在国家精准农业示范基地(北京,昌平)的鱼类养殖实验室中进行。用于图像采集和分析的养殖系统包括6个水槽,每个水槽的直径为1.5m,水深1m(图1 )[23]。图像采集和处理通过近红外工业相机(Mako, G-223B)、光源和计算机实现。相机固定到水槽的顶部。图像采集的帧率为1fps。为防止增氧设备的气泡等对图像处理结果的影响,采用风机对生物滤池进行曝气,可显著降低气泡和泡沫对成像结果的影响[24]。同时,为了尽可能避免水面波动,水槽的进水口没至水面以下,且水流沿切线方向进入。计算机被放置在水槽隔壁的控制室内,并通过一根30m长的千兆双绞线与相机连接,减少了由于人类活动引起的鱼类行为异常。图像的采集和分析是利用国家农业信息化工程技术研究中心开发的采集软件CAPNIR(SDK由AVT提供)和MATLAB 实现。

本研究选择15~25cm长的镜鲤为试验对象,购买自养殖有限公司。试验从2017年2月开始,在试验之前,鱼被养殖在系统内4周,溶解氧浓度保持在5~7mg/L之间,水温15~27℃,以适应当时的养殖环境。
本研究方法的流程如图2 所示,采集图像后,利用灰度梯度矩阵提取摄食图像的纹理特征,构建了数据集并对SVM分类器训练,最优利用SVM对摄食图像分类,得到评估鱼类摄食强度的4个等级,分别为弱、一般、中、强。

2.2 SVM及参数优化
2.2.1 SVM原理
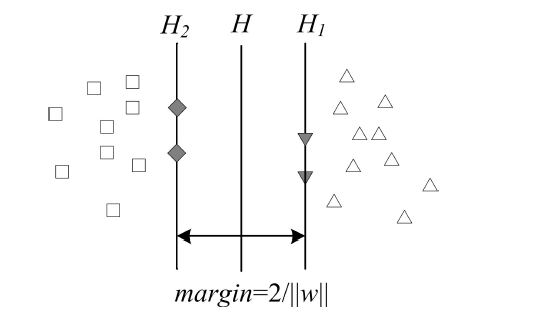
SVM的核心思想是找到一个与两个相邻数据点距离最大的最优超平面[25],如图3 所示。其中,H为最优超平面,margin为最大幅度,线H1和H2上的样本是支持向量(黑色三角形和正方形)。
2.2.2 核函数及参数优化

2.3 基于灰度共生矩阵的纹理特征提取
图像纹理分析是机器视觉研究的重要内容。在任何给定的时间和空间,物体的表面都会呈现出纹理,其与图像的颜色信息无关,并可以反映不同图像的空间组成特征。因此,可以使用纹理特征来分析鱼群的摄食活动强度,并利用灰度共生矩阵 (Gray level co-occurrence matrix, GLCM)提取描述图像纹理信息的特征参数。
GLCM反映了图像灰度的变化幅度、相邻间隔、方向等信息。在对纹理进行分析时,一般是基于GLCM提取某些指标来表征纹理的特征,这些特征主要包括对比度、能量、相关性、逆差距和熵等。
(1)逆差矩T1:反映了图像纹理的局部平稳性,即度量图像的纹理局部变化的多少,可以表示为:
${{\text{T}}_{^{1}}}=\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{\frac{P(i,j,d,\theta )}{1+{{(i-j)}^{2}}}}}$
其中,i为任意一点(x, y)的灰度值;j为偏离(x, y)的另一点(x+Δx,y+Δy)的灰度值;N为最大灰度;d为两点间的距离;θ为方向;P(i, j, d, θ)为灰度共生矩阵。
(2)相关性T2:反映灰度共生矩阵的元素值在行或列方向上的相似程度,可以表示为:
${{\text{T}}_{2}}=\frac{\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{ijP(i,j,d,\theta )-{{\mu }_{1}}{{\mu }_{2}}}}}{{{\sigma }_{1}}{{\sigma }_{2}}}$
其中,
$\begin{matrix} & {{\sigma }_{1}}={{\sum\limits_{i=1}^{N}{(i-{{\mu }_{1}})}}^{2}}\sum\limits_{j=1}^{N}{P(i,j,d,\theta )} \\ & {{\sigma }_{2}}={{\sum\limits_{j=1}^{N}{(j-{{\mu }_{2}})}}^{2}}\sum\limits_{i=1}^{N}{P(i,j,d,\theta )} \\ & {{\mu }_{1}}=\sum\limits_{i=1}^{N}{i}\sum\limits_{j=1}^{N}{P(i,j,d,\theta )} \\ & {{\mu }_{2}}=\sum\limits_{j=1}^{N}{j}\sum\limits_{i=1}^{N}{p(i,j,d,\theta )} \\ \end{matrix}$
(3)能量T3:反映了图像纹理的粗细程度和灰度分布的均匀程度,可以表示为:
${{\text{T}}_{3}}={{\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{[P(i,j,d,\theta )]}}}^{2}}$
(4)对比度T4:反映图像纹理的深浅程度以及清晰度,可以表示为:
${{\text{T}}_{^{4}}}=\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{{{(i-j)}^{2}}P(i,j,d,\theta )}}$
(5)熵T5:描述图像具有的信息量的度量,表明图像的复杂程度,当复杂程度高时,熵值较大,反之则较小,可以表示为:
${{\text{T}}_{^{5}}}=\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{P(i,j,d,\theta )}}\lg P(i,j,d,\theta )$
2.4 数据集构建
本研究聘请10位人员通过观察摄食过程中的图像评估鱼摄食过程的剧烈程度。10位人员由4位有经验的研究人员和6位生产人员构成。根据Overli等[29]对鱼类摄食行为的描述方法,将摄食过程的剧烈程度分为4类:弱、一般、中、强,分类标准见表1 。SVM对小样本训练集也有较好的效果,因此选择每种摄食强度的图像100帧,其中90%被用作训练集,其余被用作测试集。
表1 训练集样本的分类标准Table 1 Classification criteria for training set samples |
| 级别 | 行为描述 |
|---|---|
| 弱 | 鱼对饲料完全没有反应 |
| 一般 | 鱼不主动移向饲料,只摄食落在面前的饲料 |
| 中 | 鱼移向饲料并摄食,然后返回原先位置 |
| 强 | 鱼游向饲料并消耗掉所有提供的饲料 |
2.5 性能评价指标
本研究中,利用分类的准确率Accuracy和识别率Recognition两个指标来验证该方法的性能。准确率是正确识别各类摄食强度的能力,最终的值是迭代次数的平均值;识别率是正确识别某类摄食强度的能力,其分别定义如下:
$\text{A}ccura\text{c}y=\frac{1}{{{\text{N}}_{\text{num}}}}\sum\limits_{i=1}^{{{\text{N}}_{num}}}{\frac{\text{n}{{(i)}_{\text{correct}}}}{n{{(i)}_{total}}}}\times 100\text{ }\!\!%\!\!\text{ }$
$\text{Recognition}=\frac{{{\text{N}}_{\text{c}}}}{N}\times 100\%$
其中,Nnum为迭代的次数;n(i)total为第i次迭代的总样本数;n(i)corret为第i次迭代中正确识别的样本数;Nc为正确识别的某类摄食强度集的数量;N为某类摄食强度集的总数。
3 结果与讨论
3.1 摄食强度评估结果
利用GLCM提取图像的5个纹理特征。其中,4种典型摄食强度图像归一化后的特征值如表2 所示。经过特征提取后,利用SVM对数据进行训练和检验,对摄食的强度进行评估。
表 2 4种典型摄食强度图像归一化后的特征值Table 2 Normalized feature values of 4 typical feeding intensity images |
| 逆差距 | 能量 | 相关性 | 对比度 | 熵 | |
|---|---|---|---|---|---|
| 弱 | 0.7075 | 0.3763 | 0.8932 | 0.1026 | 0.3683 |
| 一般 | 0.6421 | 0.7013 | 0.7188 | 0.1377 | 0.2469 |
| 中 | 0.5273 | 0.4022 | 0.6796 | 0.1670 | 0.4710 |
| 强 | 0.1386 | 0.2704 | 0.2739 | 0.4563 | 0.8582 |
核函数参数值的选择对于实现高精度至关重要。本试验中,随机选取100帧每类标记的图片作为样本,其中360帧作为训练数据,其余作为测试数据。最后,利用训练集数据对SVM分类器进行了训练和测试。SVM分类器的参数c和g的初始范围分别为[2-4, 24]和[2-4, 24],变化步长为0.5。图5 和图6 分别为使用GS选择SVM核函数参数的3D视图和等高线图,当参数c和g分别被选取为16和11.31时,SVM相应的平均分类准确率可达到87.78%。结果如表3 所示。


表3 摄食强度评估结果Table 3 Results of the feeding intensity evaluation |
| 方法 | 参数 | 优化结果 | 准确率/% | |
|---|---|---|---|---|
| c | g | |||
| GS_SVM | c∈[2-4, 24], g∈[2-4, 24],step=0.5 | 16 | 11.31 | 87.78 |

3.2 方法表现评估
为了进一步评价本方法的整体效果,随机选取了包含4个摄食强度的样本(带标签图像)40个。并利用训练好的SVM分类器进行识别,得到的结果如图8 所示,图中真实值为人工观察的结果,预测值为SVM分类器输出的结果。真实值和预测值重合则为正确的识别,反之为错误的识别。红色箭头表示错误识别的示例。可以看出,整体上摄食强度等级识别的准确率较高,说明其与人工观察法的相关性较高。这是由于本方法综合考虑了纹理的粗细、局部变化性、周期性等特征,提取了逆差距、能量、相关性、对比度和熵5种纹理特征,较为完整描述了摄食过程图像的变化。此外,还可以看出错误的识别主要集中于相邻的摄食强度等级之间。

为了评估本方法对每种摄食强度评估的性能,检测了2组测试样本,结果见表4 。可以看出,在两组试验中,方法在摄食强度为“中”和“一般”时,其平均识别精度较低,这也与上面的结果一致,说明摄食强度为“强”和“弱”时,特征差距较为明显,识别的准确率也较高。此外,各类摄食图像的识别率均可达到85%以上,说明该方法可以达到较好的效果。
表4 摄食强度评估测试样本的识别结果Table 4 Feeding intensity evaluation results of the samples |
| 组别 | 种类 | 总数 | 识别数 | 准确率/% |
|---|---|---|---|---|
| 1 | 弱 | 40 | 37 | 92.5 |
| 一般 | 40 | 36 | 0.90 | |
| 中 | 40 | 35 | 87.5 | |
| 强 | 40 | 37 | 92.5 | |
| 2 | 弱 | 40 | 37 | 92.5 |
| 一般 | 40 | 35 | 87.5 | |
| 中 | 40 | 34 | 87.5 | |
| 强 | 40 | 38 | 85.0 | |
| 合计 | 320 | 289 | 90.3 |
此外,与轨迹跟踪的方法相比较[23],本文方法考虑的是群体行为,直接提取了纹理特征,不需要目标提取等复杂步骤,也不需要考虑水花等引起的影响,具有较强的适应性,更适合用于高密度的水产养殖中。
4 结论
针对当前鱼类摄食强度评估过程中存在的人工观察法效率低,客观性不强的问题,本研究以实现鱼类食欲自动、客观评估为目的,提出了一种利用近红外机器视觉技术评估水产养殖鱼类摄食强度的方法。主要结论如下:
(1)提出的摄食强度评估方法可以较好地描述摄食过程中图像及鱼类行为变化,识别4类摄食强度(弱、一般、中、强)的准确率达到87.78%,最终实现了摄食强度的评估,可为后续投喂决策提供理论依据和方法支持。
(2)本方法在处理过程中直接提取了5个图像的纹理特征,不需要目标提取等复杂步骤,也不需要考虑水花等对成像质量造成的干扰,更适合用于高密度的水产养殖中。通过与其他方法对比分析可知,提出的方法效果较好,在实际应用时具有较强的适应性。
但是,本研究以镜鲤为例,因摄食习性等存在差异,仍然需要验证本方法在评估其他鱼类摄食强度上的性能表现,以提高其在商业养殖场的适用性。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}