



1 精准农业航空概述
农作物病虫草害对农作物的质量和产量都造成了极大影响,造成农业产业巨额损失,是制约现代农业发展的重要因素。据联合国粮食及农业组织(Food and Agriculture Organization of the United Nations,FAO)估计,全世界每年由病虫害导致的粮食减产约为总产量的1/4,其中病害造成的损失为14%,虫害造成的损失为10%[1]。中国作为农业大国,农作物种类多、分布广,重要的农作物病虫害达1400多种,具有种类多、影响大和局部暴发成灾等特点。近年来,中国农作物病虫害发生和造成的危害出现加重趋势[2]。而传统的农作物病虫害监测以及防控主要依靠植保工作人员田间取样和调查,具有耗时、费力、效率低下和主观性强等缺点。

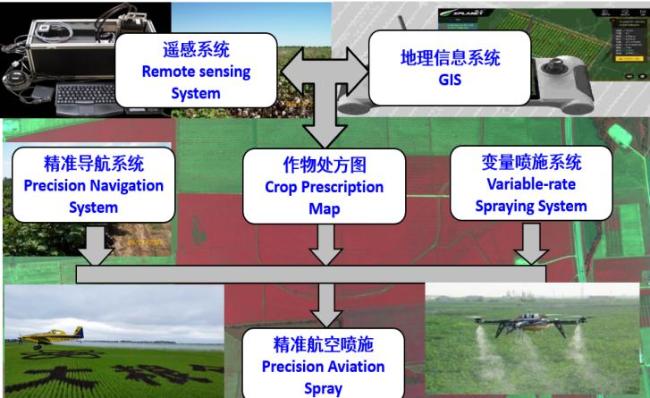
如图2 所示,精准农业航空系统包含了遥感系统、地理信息系统、精准导航系统、变量喷施系统等。它是一个整体的系统工程,其中遥感系统是其最基本的环节。借助于地理信息系统,对遥感影像进行解析可以生成农作物的作业处方图。在精准导航系统和变量喷施系统的控制下,作业处方图可以用于为作业机械的精准喷施管理提供指导依据,以便农业专家优化作物栽培管理,按需作业、变量喷施,从而提高作物质量和产量,降低生产成本[5]。
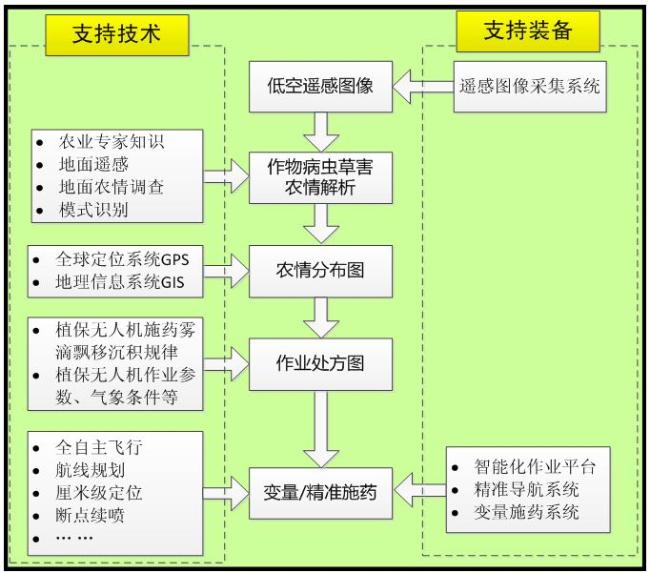
对应实施的过程,精准农业航空离不开各种技术与装备的支持。如图3 所示,遥感图像获取过程需要遥感图像采集系统的装备支持;农作物病虫草害农情解析过程需要农业专家知识、地面遥感、地面农情调查以及模式识别等技术的支持;农情分布图需要全球定位系统(GPS)和地理信息系统(GIS)等技术的支持;作业处方图的生成过程需要结合植保无人机施药雾滴漂移沉积规律和植保无人机作业参数、气象条件等技术;在变量/精准施药实施过程中,需要作业平台、精准导航系统与变量施药装置等装备支持,也需要全自主飞行、航线规划、厘米级定位、断点续喷等技术的支撑。
本研究围绕无人机农业遥感硬件、常见的图像解析方法和农业遥感应用研究三部分展开综述,首先介绍了无人机农业遥感常见的低空遥感影像采集硬件系统;之后介绍了无人机遥感图像常见的处理方法,最后,以无人机遥感监测农作物病虫草害的相关研究成果为主,分析总结了国内外无人机遥感技术在农作物病、虫、草害的研究进展,以期为农业航空遥感领域的研究人员提供相关的技术参考和方向指引,为农学从业人员提供信息化增产丰收的新思路,从而进一步推进精准农业航空技术的应用和发展。
2 无人机农业遥感系统
无人机农业遥感以无人驾驶飞机为探测平台,搭载各种传感器(通常是高清摄像机和成像光谱仪)获取农田图像,通过对数据进行后期处理、挖掘和建模,来获取更详尽的农情信息。
2.1 无人机低空遥感影像采集系统
无人机低空遥感影像采集系统主要由传感器、无人机、地面控制系统、数据处理软件四部分组成。考虑到无人机续航能力和载重量等方面的局限性,所采用的遥感传感器一般具备数字化、存储量大、体积小、重量轻、精度高、性能优异等特点。目前,常用于农作物信息采集的传感器主要有数码相机、多光谱相机、高光谱相机、热成像仪、激光雷达等。
(1)数码相机成像遥感
数码相机成像一般获取的是400~760nm之间的RGB可见光影像,为了修正光线和还原图像真实色彩,一般图像传感器都会通过滤光片把红外线滤除掉。因此一般的摄像头无近红外波段信息。由于数码相机使用方便,价格较低,且数字图像处理技术相对成熟,因此利用无人机搭载高清数码相机的遥感系统,是农作物生长状况以及病虫害监测的重要手段。由于无人机飞行高度较低,影像清晰,空间分辨率可达厘米级,通过对数码影像的纹理、颜色等图像空间信息特征进行提取与分析,可进行农作物叶面积指数计算、不同生长周期长势评估、农作物识别、病虫草害诊断等研究。大疆公司的精灵Phantom 4 RTK,其内置1英寸2000万像素CMOS传感器,用以捕捉高清影像;集成全新RTK模块,提供实时厘米级定位数据;配套的地面站软件,可轻松实现低空航拍任务。
采用数码相机进行无人机低空遥感农作物的病虫害,虽然成本较低、操作相对简单,但目前通用的数码相机的空间分辨率还是难以从空中捕获农作物冠层以及叶片的细节,在农作物症状辨别特别是早期诊断应用上还具有一定的局限性。
(2)高光谱相机成像遥感
利用高光谱遥感监测技术进行作物病虫害的诊断与监测,可及时发现、及时处理,有利于早期防治。其原理是,病虫害会造成作物叶片细胞结构色素、水分、氮元素等性质发生变化,从而引起反射光谱的变化,所以病虫害作物的反射光谱和正常作物可见光到热红外波段的反射光谱有明显差异[1]。
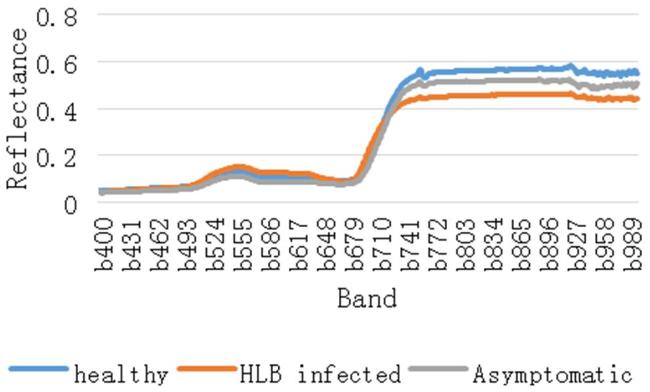
健康的绿色植物具有典型的光谱特征。遭受病虫害的植被其光谱反射率曲线的波状特征则被拉平[8]。图4 以柑橘叶片的光谱曲线为例,蓝色曲线表示健康叶片的光谱反射率,灰色曲线表示症状不明显但已确认患柑橘黄龙病的叶片,橙色曲线表示明显患柑橘黄龙病的叶片。从这个例子也可以看出,患病叶片的光谱反射率曲线波形被拉平。基于植被的光谱特征,以及其他遥感影像的特征,如可见光图像的空间信息特征等,可以衍生出农业航空遥感不同的应用领域。
高光谱成像的光谱分辨率在0.01数量级,其在可见光和近红外区域有几个到数百个波段,光谱分辨率可达纳米级。高光谱图像包含的波段信息丰富、分辨率高,能准确地反映田间作物本身的光谱特征以及作物之间的光谱差异,在农作物病虫害监测上更显优势。但目前高光谱相机的价格普遍较高,广大农户难以承受,因此目前主要应用于科学研究领域。在高光谱成像方面,市面上许多公司也推出了机载高光谱相机,如采用画幅式高光谱成像技术的Cubert S185相机[9],采用线扫描技术的Hyperspec®系列高光谱成像传感器[10],四川双利合谱科技有限公司生产的GaiaSky-mini等[11]。图5 为无人机高光谱遥感试验,该试验采用Cubert S185机载高光谱相机,通过云台搭载于大疆M600多旋翼无人机,结合光谱校正板、地面站、和控制分析软件,完成柑橘黄龙病的无人机高光谱遥感试验。

(3)多光谱相机成像遥感
多光谱成像的光谱分辨率在0.1数量级,即在可见光和近红外区域一般只有几个波段。无人机农业遥感领域常见的多光谱相机通常可以获取4个波段以上的光谱图像,如图6 所示的Parrot Sequoia多光谱相机,可同时捕捉绿光、红光、红边和近红外4个波段图像以及用RGB图像来反映植物的健康状况。也可以定制特定窄波段的多光谱相机,根据特定的遥感应用对不同的波段以及波段范围进行量身定做。

本文作者早在2009年于美国农业部南方平原农业研究中心(Southern Plains Agricultural Research Center, Agricultural Research Service, USDA)已经开展了低空遥感多光谱成像系统的研究。进行了三种不同类型的机载遥感多光谱成像系统的性能研究[12],涵盖低成本和相对高成本、手动操作和自动操作、使用单个摄像头的自动多光谱合成成像和多个摄像头的集成成像,试验研究表明,低成本的多光谱成像系统因波段饱和、成像速度慢和图像质量差,比较适用于能靠近地面飞行的低速移动平台,但不推荐用于固定翼飞机上的低空或高空航空遥感;由于对有效载荷的限制和安装复杂,高成本成像系统不推荐适用于无人驾驶直升机;成本适中的多光谱成像系统,适用于基于地块定位文件触发的固定翼飞机低空航空遥感,也适用于全球定位触发或人工操作的固定翼飞机高空航空遥感;建议在固定翼飞机上采用定制系统进行高空航空遥感,触发或手动操作航路点全球定位。美国农业部Yang等[13]采用两个消费级的彩色摄像机搭载了多光谱成像系统,一个摄像头捕捉正常的彩色图像,另一个则被修改以获得近红外(Near Infrared, NIR)图像,对该系统进行了两年的机载测试和评估,结果表明该双摄像机成像系统性能可靠,成像系统具有监测作物生长状况、检测作物疾病和绘制农田和湿地生态系统入侵杂草图的潜力。以上研究表明,在农业遥感领域,近红外区域以及红边区域是农作物生长信息较敏感的波段。对数码相机进行结构修改以获取近红外图像,结合可见光波段,便可以实现多光谱成像。
目前机载多光谱相机的频谱波段数较少,一般在四个波段左右,波段范围较宽,光谱分辨率较低,且图像的空间分辨率也较低,因此在应用中通常与高分辨率的数码相机或高光谱相机进行图像融合,以满足更高的应用需求。
(4)红外热成像遥感
热红外遥感(Infrared Remote Sensing)是指传感器工作波段限于红外波段范围之内的遥感。热红外遥感的信息源来自物体本身,只要地物温度超过绝对零度,就会不断发射红外能量[14]。无人机热红外成像遥感就是利用机载热红外传感器收集、记录地物的热红外信息,并利用这种热红外信息来识别地物和反演地表参数如温度、湿度和热惯量等。
由于主动式红外热成像方式对目标物的人为操作可能破坏其物理特性,从而使得试验数据不准确,因此,在植物病虫害遥感应用领域,红外热成像多数采用的是被动式方式。但是,由于农作物本身已经达到了热平衡状态,或者物体的热福射差异微小,因此被动式红外热成像技术难以获得湿度场信息。此外,植物叶片灾害区域与正常区域的温差一般相差不大,所得到的热图像缺少层次感。再加上探测器本身器件的原因和客观探测条件的干扰,红外热成像的图像边缘模糊,信噪比低。因此,红外热成像在农作物病虫草害监测应用中,具有一定的局限性。
目前在农业航空遥感应用领域,通常采用数码相机与红外热成像仪相结合的监测方式。如无人机搭载红外热像仪和数码相机,可以识别地面的温差,并定位区域,也可实现如鼠害识别方面的农业应用。
(5)激光雷达成像遥感
机载激光雷达(Light Detection and Ranging,LiDAR)与光学成像遥感不同,它是通过主动探测目标的散射光特性来获取相关信息的遥感技术,是近些年新兴的遥感技术,目前是植物表型研究中重要的监测手段[15]。其主要优势在于可以获取高精度的三维数据,在植被垂直结构探测上开辟了可能性,弥补了光学遥感在提取冠层结构信息方面的不足。
2.2 无人机遥感图像解译方法
不同类型的遥感图像数字处理方法不尽相同,但基本上包含以下环节:遥感图像的辐射处理、几何处理、遥感图像增强以及遥感图像解译。前面三个环节主要是图像预处理部分,相关的原理与方法可详见相关教材或书籍。而解译是根据遥感图像的影像特征推论地表物体的过程,其与遥感应用目的紧密相关,因此,本节主要根据农作物的病虫草害检测的特定应用,对无人机遥感图像常见的解译方法进行阐述。
遥感图像解译方法主要分为目视解译和计算机解译两种。目视解译是指专业人员通过直接观察或借助判读仪器,在遥感图像上获取特定目标地物信息的过程。计算机解译是以计算机系统为支撑环境,利用模式识别技术与人工智能技术相结合,根据遥感图像中目标地物的各种影像特征,结合专家知识库中目标地物的解译经验和成像规律等知识进行分析和推理,实现对遥感图像的理解,完成对遥感图像的解译[20]。
在无人机农业遥感领域,根据遥感图像解译的应用目的可以分成两大类,一类是对目标农作物的属性或状态进行定性分析,如农作物品种分类、病虫草害诊断等;另一类是对农作物进行定量分析或信息提取,如农作物叶片氮含量、水含量、叶面积指数等定量反演。根据无人机遥感图像解译时所采用的特征信息来分类,又可以分成基于光谱空间的解译方法、基于图像空间信息的解译方法以及基于混合特征(光谱信息、图像空间信息)的解译方法。根据模型是否具有机理性和普适性,又可分为经典统计分析和基于模式识别和机器学习的解译方法等。
(1)经典统计分析方法
经典统计分析中,相关性分析、主成分分析、多元回归和偏最小二乘回归等统计分析方法原理在反演中常被使用。在进行定量遥感反演农作物生长状态时,植被的光谱特征是遥感识别植被和判断植被生长状态的主要依据。基于光谱特征的数据分析方法主要是通过对光谱曲线进行特征分析,发现不同地物的光谱曲线变化特征,从而达到识别地物或定量分析地物特性的目的。
光谱波段之间的运算,如比值分析、归一化等计算可以获得若干个植被指数信息。通过对植被指数进行相关性分析或回归分析,可建立遥感影像数据与农作物生长信息的反演模型。归一化植被指数(Normalized Difference Vegetation Index,NDVI)、比值植被指数(Ratio Vegetation Index,RVI)、土壤调节植被指数(Soil-Adjusted Vegetation Index,SAVI)和增强植被指数(Enhanced Vegetation Index,EVI)等是遥感反演中常用的植被指数[21]。这种建立植被指数与农作物生长信息的统计关系的遥感反演方法称为经验模型方法。经验模型方法虽然简单易行,但模型中函数与函数中的系数是经验型的,对植被的生长环境、生长周期以及数据获取方式敏感;需要大量实测样本数据;也容易受到遥感图像中背景地物的影响;对农作物长势的生理学方面解释不足,缺乏明确的物理意义。
(2)基于模式识别和机器学习的图像解译
在农作物遥感监测中,对遥感图像的定性分析可以归纳成分类问题。遥感图像分类的新方法主要指的是基于模式识别和机器学习的分类方法。在无人机遥感影像分析应用中,机器学习方法主要通过对数据输入变量(如图像灰度值、空间特征、光谱反射率、植被指数等)与输出变量(待反演的农作物长势参数、病虫害等级、识别目标类别等)之间的关系,从而建立一个非线性模型[25]。
机器学习方法主要分为经典学习方法和深度学习方法。经典学习方法主要有支持向量机、决策树、逻辑回归、随机森林和K近邻算法等,所需训练样本数据量较小、设备性能要求较低、模型更容易理解。在经典机器学习方法中,特征提取是决定图像分类效果至关重要的环节。除了光谱特征信息,图像的空间信息如纹理和颜色特征,也常用于进行农作物的生长状况监测、作物种类识别和病虫害程度诊断等。通过直方图的统计,可以分析遥感图像中不同灰度值的概率分布;通过空间自相关函数、灰度共生矩阵和熵等计算,可以分析遥感影像纹理的深浅、粗细、均匀或复杂程度,从而实现对农作物的识别或诊断。
深度学习是机器学习研究中的一个新的领域,起源于人工神经网络模型。它具有特征学习和深层结构两个显著特点,有利于遥感图像分类精度的提升。其中,特征学习能够自动从海量数据中学习到所需的高级特征表示,更能表达数据的内在信息,无需设计特征提取算法。深层结构通常拥有多层的隐层节点,包含更多的非线性变换,因而拟合复杂模型的能力大大增强。基于深度学习网络的遥感图像分类方法对数据有很强的依赖性,对训练样本数据量要求较高,需要高昂的GPU完成合理时间内对大量数据的训练,其深层网络是“黑匣子”型,不易被理解。常见的深度学习方法有卷积神经网络(Convolutional Neural Network,CNN)、深度置信网络(Deep Belief Network,DBN)、稀疏自动编码(Sparse Autoencoder,SAE)以及对这些进行优化的深度学习方法。因算法自身问题、数据库建立不完善等问题,基于深度学习的遥感图像分类方法目前仍处于探索阶段,离大规模实际应用还有一定距离。
3 无人机遥感在农作物病虫草害监测研究进展
从1960年提出“遥感”这一术语以来,多数指的是卫星遥感。随着无人机技术的快速发展,农业航空遥感特别是无人机遥感成为了近些年的研究热点。在农作物病虫害监测应用中,由于卫星遥感影像分辨率低,难以识别农作物病虫害的局部特征,具有很大的局限性。而无人机遥感可以提供更高分辨率(如空间分辨率、光谱分辨率、时间分辨率)的影像数据。
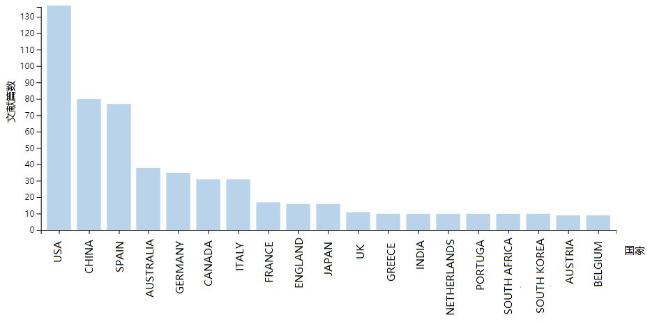
近几年陆续出现基于无人机遥感的农作物病虫草害监测的研究。笔者通过在Web of Science检索平台对最近15年来有关无人机遥感在重要农作物遥感应用方面的学术出版物进行检索(采用以下检索式:TS=(UAV or UAS or unmanned aerial vehicle or Airborne hyperspectral or airborne multispectral or airborne high resolution camera) AND TS=(citrus or cotton or rice or corn or potato or tomato or grape or wheat or weed or crop) AND TS=(distinguish or identification or classification or detection) AND TS=(low altitude remote sensing or remote sensing),筛选其中有关作物病虫害监测研究的报道,得出各国科科技论文数量。发现近15年来,国内外基于无人机遥感农作物应用研究的科技论文发表数量基本呈现从无到有且迅速增长的趋势。2015年至今,科技论文数量增加最为明显,如图7 所示。图8 是世界重要农业国家无人机遥感农作物病虫草害科技论文数量对比图。由图8 可以看出,美国、中国、西班牙的相关研究成果相对较多,特别是美国,其研究报道数量遥遥领先其他国家。通过这些数据表明了美国、中国和西班牙等国家在无人机遥感农作物应用的重视程度以及研究基础。
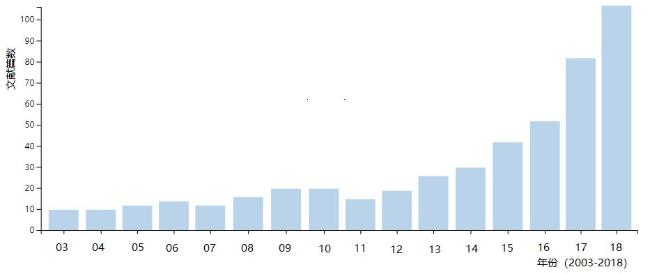
图7 2003-2018年期间无人机遥感农作物病虫草害科技论文数量Fig. 7 Comparison of the number of scientific papers on crop diseases, insects and weeds by UAV remote sensing during 2003-2018 |
3.1 无人机遥感在农作物病害识别的研究进展
3.1.1 无人机高光谱遥感病害进展
在病害检测方面,已有不少团队针对柑橘、小麦、棉花等农作物开展了无人机高光谱遥感研究。
在柑橘黄龙病(Huanglongbin)的无人机遥感研究上,佛罗里达大学Lee[26]团队利用地面高光谱仪建立光谱库,用来为低空高光谱图像进行波谱匹配识别分类。但由于获取光谱的采集设备和拍摄条件有别,该方法的识别准确率较低;Kumar等[27]利用图像衍生光谱库、混合调谐匹配滤波(Mixture Tuned Matched Filtering,MTMF)、光谱角映射(Spectral Angle Mapping,SAM)等技术对无人机机载高光谱图像和多光谱图像进行分析,以实现柑橘黄龙病感染区域的识别,研究结果表明在基于光谱库的方法在柑橘黄龙病检测上,准确率并不理想。因此采用地物谱仪建议光谱库以识别低空高光谱图像的柑橘黄龙病特征,具有一定的局限性。兰玉彬等[28]通过无人机获取低空柑橘果园的高光谱影像,对健康和患HLB植株的光谱进行对数和一阶微分计算,并采用K邻近(K-Nearest Neighbor,KNN)和支持向量机(Support Vector Machine,SVM)进行建模和分类,分类准确率达到94.7%,该方法表明基于机器学习的方法实现低空高光谱遥感检测HLB的手段具有一定的可行性,但不同柑橘品种、种植区域以及拍摄条件对该算法的应用具有一定的挑战性,试验数量和算法的优化是下一步完善的方向。
目前无人机遥感柑橘病害的文献报道较少,已有的研究中,采用的无人机低空拍摄高度大多在100m以内,在患病严重的植株区域才能获得较显著的检测或诊断结果[28]。对于早期病害检测或者病害等级分类等应用,目前的方法还具有一定的局限性。在病情已经严重的情况下,进行识别诊断的意义并不显著。大范围研究患病以及病情蔓延规律,对于病情预测,早期发现更具有实际应用价值,因此,病情扩散规律的遥感监测以及早期预报将是下一步研究的方向。
在棉花的病害监测上,早在2005年,美国农业部南方平原中心已经开展了棉花根腐病的无人机遥感监测研究,Yang等[31]从机载三波段的数字图像开始,到后来采用多光谱和高光谱影像在监测棉花根腐病上进行了不断地尝试。结果表明,可见光、多光谱和高光谱图像在无人机遥感棉田内的根腐病区域都具有可行性,高光谱图像在病害早期监测上更具有可行性。在棉花黄萎病(Cotton Verticillium)严重程度的检测上,Jin等[32]也开展了基于高光谱遥感的研究。该研究采用小波变换提取主要信息并降维,然后建立了四种识别模型(判别分析、反向传播(BP)神经网络、遗传反向传播(GA-BP)神经网络和SVM,得出SVM识别效果最好的结论。该研究表明了无人机高光谱遥感在棉花黄萎病的监测可行性。
综上所述,无人机高光谱遥感农作物病害,具有较高的监测可行性。目前无人机高光谱图像的解译关键在于病害特征波段的优选。不同农作物、不同病害的特征波段往往不具有唯一性,各个特征波段的组合运算可以构造特定病害的胁迫指数,以此用于病害诊断和识别,因此优选的特征波段质量和数量与遥感检测效果息息相关。此外,在无人机遥感高光谱图像处理过程中,感兴趣区域ROI(Region of Interest)的提取、地物与背景的分割效果对提取出的光谱数据也有一定的影响。
3.1.2 无人机多光谱遥感病害检测研究进展
在无人机多光谱遥感病害方面,国内外学者在多种农作物上,也探索了低空遥感病害的可行性。
在葡萄园的大面积监测领域,欧洲的学者在无人机遥感监测方式上进行了探索。葡萄黄萎病(Flavescence dorée)对欧洲的葡萄园造成了严重的经济损失,因无法治愈,至今仍威胁着欧洲葡萄种植业。法国学者Johanna等[33]使用单变量和多变量的分类方法,用无人机图像(如光谱带、植被指数和生物物理指数)计算出健康和有症状的葡萄藤的光谱特征,结果发现红色栽培品种获得了最佳的分类结果。意大利学者GeNNaro等[34]则对葡萄条纹病(Grapevine Leaf Stripe Disease,GLSD)监测开展了研究,使用无人机获得高分辨率多光谱图像计算归一化差异植被指数(NDVI),与通过地面调查检测的GLSD叶片症状进行相关性分析,结果显示了两者之间具有高度相关性,该研究在每一棵葡萄树上都装了GPS,用于定量和定性分析有症状植物的空间分布,该系统还可以用于探索GLSD的生理学基础,并预测该疾病的发作。
Nebiker等[37]研究对比了两种多光谱机载传感器的性能,并对油菜、大麦、洋葱、土豆和其他作物进行遥感试验。比较的传感器包括一个高端多光谱4c相机,带通滤色片和天顶方向的参考通道,以及一个低成本的消费级佳能S110 NIR相机,带拜耳模式滤色片。地面参考测量是通过地面高光谱仪获得的。研究表明,高端系统的测量结果与地物谱仪的测量结果一致,平均偏差仅为0.01~0.04 NDVI值。低成本系统在提供更好的空间分辨率的同时,表现出明显的偏差。传感器随后被用来进行油菜和大麦的作物产量估算和马铃薯、洋葱栽培的植物病害检测。油菜和大麦的不同植被指数与参考产量测量之间存在高度相关性。利用高几何分辨率和低至2.5cm的地面采样距离,分析了洋葱蓟马侵扰的影响,并在侵扰初期成功地检测到马铃薯枯萎病。该研究表明,单个多光谱传感器具有卓越的干扰滤波器和天顶方向的参考通道,确保了光谱测量的高质量,并可以不需要对地面光谱参考测量。高分辨率RGB图像与多光谱图像的结合,在农业遥感应用领域更有应用前景。
3.1.3 无人机数码影像遥感病害进展
数码相机因其设备成本低、实用便利、空间分辨率高等特点,也常作为无人机机载传感器,用于多种农作物病害检测的探索研究中。
王震等[38]利用无人机遥感数码图像,设计了一种小型多旋翼无人机水稻病害识别系统,首先对白穗图像提取Haar-like特征,其次以Adaboost算法进行白穗识别,识别率达93.62%。该方法是目前首个利用“无人机遥感+可见光”图像进行水稻白穗识别的研究报道,对于大面积稻田病害识别具有一定的参考作用,后期需要针对高强度光照和遮挡问题,在白穗图像特征提取算法以及分类识别算法上进行优化研究。
Castelao Tetila等[41]针对大豆叶病,提出了一种计算机视觉系统,利用低成本无人机模型DJI Phantom 3捕获的可见光图像跟踪野外大豆叶片病害。该研究提取RGB图像中颜色、梯度、纹理、形状等视觉特征,比较了不同飞行高度获取的数据和6种分类器的性能,试验结果表明,颜色和纹理属性导致更高的分类率,在1m到2m之间的高度达到98.34%的精度,每米衰减2%。该研究结果为无人机低空遥感飞行高度的选择以及遥感图像特征选择提供了理论依据和指导。Deng等[42,43,44]根据图像的纹理颜色等特征,采用支持向量机和神经网络等建模方法,在可见光图像进行柑橘黄龙病的检测分类,也获得较好的分类结果。以上研究成果表明,即使是症状复杂的农作物病害,只要人眼能够识别出的症状鉴定或分类识别,采用数字图像处理技术也能取得较好的检测效果。
综上所述,无人机遥感在水稻、柑橘、棉花、葡萄等农作物病害监测上均取得了一些进展,最早由无人机搭载可见光相机,到近几年多采用多光谱相机、高光谱相机乃至热红外成像仪,获取低空遥感影像进行统计分析、图像处理和机器学习方法等农情解析。这些研究成果离大规模应用转化还有一段距离,目前的研究成果主要是针对特定农作物、特定试验园区以及特定病害监测进行的可行性研究,多数研究成果与农学植保、病理等理论知识结合不够紧密,对农作生长规律和病害发生规律的研究深度不足。
3.2 无人机遥感在虫害控制中的应用进展
在农作物的虫害监测方面,由于一般虫害具有移动性,目前农作物在虫害监控上,多数采用地面视频监控法。利用无人机遥感进行农作物虫害监测的研究报道并不多见。黄华盛等[45]利用无人机多光谱图像检测了棉花上蜘蛛螨的侵染情况。该研究采用两级分类法进行螨类入侵检测,在第一阶段,应用支持向量机分类器将每个像素分为三类:棉花、阴影和其他;在第二阶段,使用一个转移深度学习网络—Alexnet将所有的棉花像素分为四类:正常、轻、中、重,试验结果表明,该方法的总体精度可达95.4%,开辟了无人机多光谱图像的螨类感染检测新方法。Fernando等[46]使用RGB、多光谱和高光谱相机获取多源遥感图像,提出了评估葡萄园害虫(葡萄园叶状体)的监测预测模型。该研究也证明了高光谱图像也可以检测人眼暂未发现的葡萄叶状体,研究中提出的方法、工作流程、结果和分析将有助于为植物病虫害监测提供有价值的信息,所提出的方法也可以外推到遥感研究的其他领域,如矿产勘探、生物多样性和生态评估。
Severtson等[47]使用无人机多光谱图像检测油菜籽缺钾与绿桃蚜虫感染之间的关系,发现油菜籽缺钾使其更容易感染绿桃蚜虫。吴才聪等[48]使用大疆精灵4获取高度为100m的无人机数码影像,并对影像进行分类,提取村庄、秸秆垛和玉米地。通过人工调查,获取玉米受虫害株率数据,进行虫源基数的分级。该研究利用无人机获取玉米地的分布和调查秸秆垛的百秆含虫量,探寻虫源和受虫害株率的相关性。Morley等[49]使用配备遥感摄像机的无人机可以在森林和残余灌木地上空飞行,通过分析植被的光谱特征,检测负鼠的存在及其造成的损害。基于监测结果,无人机可以精确地分配毒素或陷阱到这些确定的地点。Zhang等[50]采用无人机遥感高光谱图像,展开了翡翠灰蛀虫早期监测的研究,利用植被指数对叶绿素含量进行反演,为高光谱在病虫害预测及早期诊断的应用提供了可能性。Samseemoung等[51]应用无人机多光谱图像识别油棕榈树的虫害,研究表明归一化植被指数(NDVI)与作物的虫害侵染程度具有良好的相关性,通过聚类分析可将受感染植物与健康植物区别开来。Huang等[52]于2008年就利用MS4100机载多光谱相机搭载了无人机多光谱成像系统,分析近红外、红、绿波段图像,计算出NR、NG、NDVI和NDNG指数,用于评估农业领域的生物量、作物健康、生物类型和虫害,该研究是较早地提出无人机遥感农作物的报道之一,为后来的研究指引了方向。Yue等[53]在白洋淀农业区开展了无人机数码影像的虫害监测研究,该研究在快速处理无人机图像上进行了探索,采用改进的尺度不变特征变换(SIFT)算法和面向对象的信息提取技术进行图像处理,研究对当地农作物病虫害防治取得了良好的效果。
综上所述,无人机遥感在农作物虫害监测领域尚处于尝试探索阶段,目前研究报道较少,尤其无人机遥感蝗虫的文献鲜有报道,主要报道集中在无人机数码影像、多光谱和高光谱遥感图
像的处理分析方法。在此领域的研究方向可结合热红外成像获取害虫的温差信息,采用视频或定时获取遥感图像的方式,研究虫害的蔓延规律等,从而加快无人机遥感在农作物虫害监测的研究进展。
3.3 无人机遥感在农作物杂草识别中的应用
近年来,基于无人机遥感的杂草识别研究引起了广大学者的关注。目前采用的机载传感器主要是多光谱相机和数码相机。
在多光谱图像识别杂草应用方面,Pérez-Ortiz等[54]通过无人机获取向日葵农田遥感光谱图像,提出了一种作物行距检测方法,结合作物的行排列特性以及遥感图像的光谱信息,采用半监督学习方法实现了精确的杂草识别。该研究不仅利用了遥感图像的光谱图像信息,也利用了农学经验知识进行杂草识别,简化了杂草和作物的鉴别过程。Afroditi等[55]使用固定翼无人机搭载多光谱相机(绿—红—近红外)获取高分辨率图像,利用具有自动相关性测定的多层感知器(MLP-ARD)来鉴别水飞蓟。Alexandridis等[56]采用无人机采集田块的多光谱遥感图像,识别田块中水飞蓟的分布信息。该研究采用绿、红、蓝三个波段以及近红外波段的局部差异信息作为特征向量,分别使用单分类支持向量机、单分类自组织映射图、单分类主成分分析法进行分类判别,将每个像素分为两个类别:杂草和非杂草,试验结果证明,基于单分类支持向量机算法对水飞蓟的识别率达到了96%。Pantazi等[57]也采用无人机机载多光谱相机采集高分辨率图像,并采用重采样和三种分类方法Supervised Kohonen网络(SKN)、反向传播人工神经网络(CP-ANN)和xy融合网络(xy-F)进行了杂草与作物的识别,研究表明三种分类方法的识别率均高于98%以上。Inkyu等[58]针对深度学习网络在无人机遥感多光谱图像中杂草识别应用中的问题,采用一种站式滑动窗口方法改进深度学习网络基本模型开发了一种新的作物与杂草分割和识别方法。
采用可见光图像及其与多光谱图像的融合方法在无人机遥感农田杂草识别也在研究领域不断涌现。Irene等[59]使用重采样图像(RS图像,可见和近红外光谱)精确提取了高分辨率无人机图像在30m高度的光谱值和高度为60m、100m的遥感图像数据,采用多源融合方法,识别杂草覆盖并生成除草剂应用图谱。该研究在遥感范围和遥感图像的分辨率之间取得了折中,这种多源融合方法可以借鉴到无人机遥感的其他研究领域。López-Granados等[60]采用基于对象的图像分析(OBIA)方法,通过分析在30m和60m高空飞行的无人机收集的可见和近红外光谱的重叠航空图像,生成两个向日葵田的杂草幼苗侵扰图。王术波等[61]提出一种基于卷积神经网络(CNN)的杂草分类和密度测算方法,通过无人机低空拍摄采集3种杂草(藜草、葎草、苍耳)和3种作物(小麦、花生、玉米)的数码图像作为数据集,经过裁剪、灰度化等前期处理,并通过旋转方式扩充数据集,训练集输送给卷积神经网络,采用Softmax回归,实现6类植物的分类。分类结果表明300×300分辨率时识别率最高可达到95.6%[62]。Calvin等[63]基于无人机获取的可见光图像,使用特征学习的方法缩减所需的手动工作量,生成一组图像滤波器,提取区分相关杂草和其他背景对象的特征。Lottes等[64]基于无人机遥感数码影像,在甜菜等作物中实现了杂草识别。黄华盛等[65]使用无人机在水稻田上获取高分辨率可见光图像,采用全卷积网络(Fully Convolutional Network, FCN)进行像素级分类,并采用棋盘分割过程构建处方图。此后,还使用了基于补丁的CNN算法和基于像素的CNN方法与FCN进行比较,结果表明FCN算法性能最佳[66,67]。
综上所述,机器学习分类方法在无人机遥感杂草识别应用中较为常见,且多数采用多光谱图像、可见光图像以及两者的融合。近几年,无人机遥感与深度学习算法的结合的研究,突显了其在大面积农作物病虫草害诊断识别应用上的优势以及发展趋势。相比起病虫害诊断,无人机遥感在杂草识别的应用更具操作性和推广价值。
4 面临的挑战
尽管近几年中国无人机技术发展迅猛,中国的农业无人机已经走向全球,处于领跑地位,然而无人机农业遥感离实际应用还有一定的距离。目前无人机遥感农作物病虫害的进展主要受到以下方面的制约。
4.1 无人机遥感数据库
多数研究成果仅仅适用于当次获取的无人机遥感影像,研究方法或模型难以在实际应用推广。其主要原因之一在于农作物的生长具有周期性、连续性、季节性和地域性,对于同一种病害在作物不同生长时期表现特征和光谱响应特征有所差异。同理,不同地域、不同农作物品种的遥感影像也具有差异性。因此,目前已有的研究成果多数不具有普适性、稳定性和通用性。即使在单次的遥感试验中获得很高的识别率,但并不能保证用于其他时刻获取的遥感数据的有效性。此外,目前已有的软件如ENVI的光谱库主要用于地物识别,农作物病虫害的光谱数据库以及图像数据库等仍处于空白阶段。
4.2 农作物病虫害早期诊断
农作物病虫害监测应用中,早期诊断的表现症状不明显,无论是目视观测还是计算机解译,都具有较大的难度。但早期诊断的研究意义和需求更大,更有利于农作物的预防和控制,防止病虫害的蔓延发展。
由于无人机与地面农作物之间具有一定的遥感拍摄距离,因此,当前的机载传感器获取的遥感影像难以捕捉图像细节,对农作物病虫害早期症状表述不清。此外,病害发生早期,即使高分辨率图像也难以解析,需要结合病虫害发生的温度、湿度等气象和植保数据,才有可能实现病虫害遥感监测和预测预报。
通过查阅已有研究文献,目前针对无人机遥感农作物病虫害早期诊断的研究鲜有报道,少部分研究表明高光谱低空遥感在农作物病虫害诊断研究中,具有一定的可行性。
4.3 无人机机载传感器
无人机遥感影像质量严重依赖天气。由于目前无人机遥感多数是被动式光学成像方式,采集数据时对太阳光照有较高的要求。遥感作业的最佳时间是正午时分,太阳光照最充足的时候能获取最佳的图像质量,多云天气作业则会增加图像预处理复杂度,也会导致监测效果降低。此外,目前大多数机载光谱相机,需要通过定标板完成辐射校准,这给实际操作带来诸多不便。虽然Sequoia+声称是第一个提供相对反射测量而不需求辐射校准板的多光谱相机。然而在实际应用中,为了得到更加精准的测量效果,多数试验研究和应用仍然需要经过辐射校准板及相关数据处置软件,来解读这些辐照度值并测量反射率。
低空遥感农作物病虫草害,对遥感影像的空间分辨率和光谱分辨率都提出了较高的要求,满足需求的机载传感器造价高昂,特别是高光谱相机的价格,严重限制了无人机遥感的实际应用。针对设备昂贵的问题,在进行遥感试验研究时,可以重点加强对农作物病虫害敏感波段的研究,根据敏感的特征波段定制光谱相机,便于在实际推广应用。
4.4 软件与算法
目前,针对无人机遥感数据的处理软件具有一定的拼接性,也就是说从遥感影像的拍摄控制、拼接、预处理、农情解析直至作业处方图的生成,往往都是在不同的软件环境下进行,导致在实际使用过程中对操作人员的专业性提出较高的要求。因此,软件和算法的不成熟制约无人机农业遥感发展的重要因素之一。此外,虽然无人机遥感影像处理方法已经不断涌现了新方法,例如机器学习方法。然而这些新方法大多数局限于简单的照搬照套,缺乏对算法在无人机遥感影像中的适用性研究,目前无人机遥感解析算法仍处于应用初探水平。
5 结论与展望
无人机农业遥感是目前精准农业领域的研究热点。比起卫星农业遥感方式,无人机农业遥感技术具有机动性强、分辨率高、设备成本低等优势[68];比起地面感知方式,具有范围广、速度快、人力成本低等优势。因此无人机农业遥感方式前景辽阔,发展潜力巨大。
随着无人机和传感器技术的不断完善,遥感图像分析处理技术和算法的不断发展,无人机遥感农作物病虫草害的监测方式将不断向实际应用迈进。考虑到无人机遥感农作物病虫害监测中面临的多种挑战,未来该领域将主要从以下方面展开科学研究:
(1)开展基于无人机遥感的农作物病虫害早期监测的研究。需要认清无人机遥感图像在细节表征上的局限性。高分辨率的高光谱图像结合地面遥感方式在早期病虫害监测的探索,仍需进一步深化。借助于大数据技术与人工智能,分析农作物在不同生长周期的影像特征,研究早期预报和诊断模型,将可能促进农作物早期诊断的研究进展。
(2)研发针对特定应用的低成本机载传感器。通用型机载传感器如高光谱相机造价过高,限制了其在田间的广泛应用。针对特定病虫草害,未来可以通过科学研究探索特征波段或植被指数,进行低成本机载传感器的定制,从而降低设备成本。此外,可以结合光照等传感器,使得无人机光谱遥感过程无需辐射校准任务,朝着操作简易性方向发展。
(3)开展遥感数据处理的实时性研究。大多数无人机遥感获取的影像很难实时完成农情解析。目前,Parrot bluegrass field 解决方案声称可在飞行过程中实时生成NDVI地图[69],意味着遥感数据的实时处理技术已经有了质的飞跃,未来的研究将在此基础上深入探索。实时处理算法以及实时处理器将大大加速农业航空遥感的发展和应用进程。
(4)开展低空遥感数据与农学植保、病理等理论知识的融合研究。只有更紧密的融合经验数据与农学植保等理论,才能建立更符合作物生长规律的田间诊断模型,将更进一步提高无人机遥感农作物病虫草害监测的有效性和准确性。未来需要从表观层面的遥感图像分析深入到结合病虫害发生机制的遥感监测,从简单的试验环境过渡到综合考虑作物生长规律、环境因素等的实际应用研究中。
(5)建立无人机遥感多源数据库以及开展大数据、人工智能等新技术在农业遥感领域的深入开拓与适用性研究。针对病虫草害光谱响应特征专属认证不足的问题,在今后的研究中若能提取作物病虫害的专属光谱响应特征,建立作物病虫害光谱库,以支持特征构建和模型研究,则可以提升监测模型对复杂农田环境的适应能力[1],并结合大数据、人工智能等手段,更好地研究农作物病虫草害的光谱特征波段提取和诊断监测模型的构建方法。
(6)从无人机定性遥感发展到定量遥感的研究。目前机器学习和模式识别在无人机遥感领域的应用,多数属于定性遥感,即看图识物,且多数属于拿来主义。未来更值得考虑的事,应该是如何将定量遥感的物理模型与大数据的数据挖掘、机器学习等手段相结合,通过物理学意义的模型或者是其他模型表达无人机遥感数据与农作物病虫害之间定量反演的关系,更深入地进行内在机制的理论研究。
总之,虽然无人机遥感在病虫害草监测领域仍处于起步阶段,与实际生产应用普及仍存在着较大距离,但该技术具有巨大的发展潜力和应用价值。要充分发掘该技术潜力,还需要相关学科专家的共同努力,将农学和植保经验知识与遥感信息与模型进行有效整合,使无人机遥感技术走向成熟。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}