



1 引 言
2 材料与方法
2.1 材料与设备
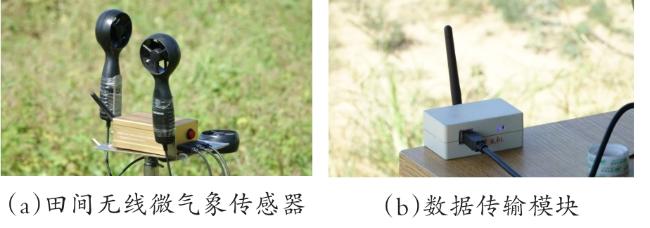

图2 3WM8A-PRO型电动八旋翼无人机 Fig. 2 3WM8A-PRO model 8-rotor electric powered UAV |
表1 参试无人机技术参数和喷洒参数Table 1 Technical parameters and spraying parameters of UAV in test |
| 项目 | 参数 |
|---|---|
| 机型 | 3WM8A-PRO |
| 旋翼直径/mm | 760 |
| 机身尺寸(长×宽×高)/(mm×mm×mm) | 2390×2390×600 |
| 旋翼覆盖宽度/mm | 3080 |
| 载重/kg | 20 |
| 净重/kg | 18 |
| 最大起飞重量/kg | 46 |
| 喷杆长度/mm | 3180 |
| 喷头间距/mm | 550,980 |
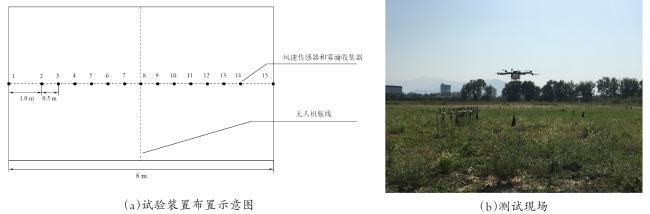
2.2 试验方法
2.3 数据处理
2.3.1 雾滴沉积量计算
2.3.2 沉积量变异系数
2.4 试验安排与气象参数
表2 试验中各组飞行参数与气象参数Table 2 Flight parameters and environmental parameters in each test |
| 试验编号 | 飞行高度/m | 飞行速度/ (m·s-1) | 温度/℃ | 湿度/% | 风速/ (m·s-1) |
|---|---|---|---|---|---|
| 1 | 1.0 | 1.0 | 29.4 | 30.0 | 0.57 |
| 2 | 1.0 | 3.0 | 30.0 | 28.5 | 0.39 |
| 3 | 1.0 | 6.0 | 28.7 | 34.3 | 0.80 |
| 4 | 2.0 | 1.0 | 29.4 | 30.7 | 0.47 |
| 5 | 2.0 | 3.0 | 28.7 | 34.2 | 0.34 |
| 6 | 2.0 | 6.0 | 29.2 | 30.9 | 0.44 |
3 试验结果与分析
3.1 旋翼下洗气流场分布可视化及分析
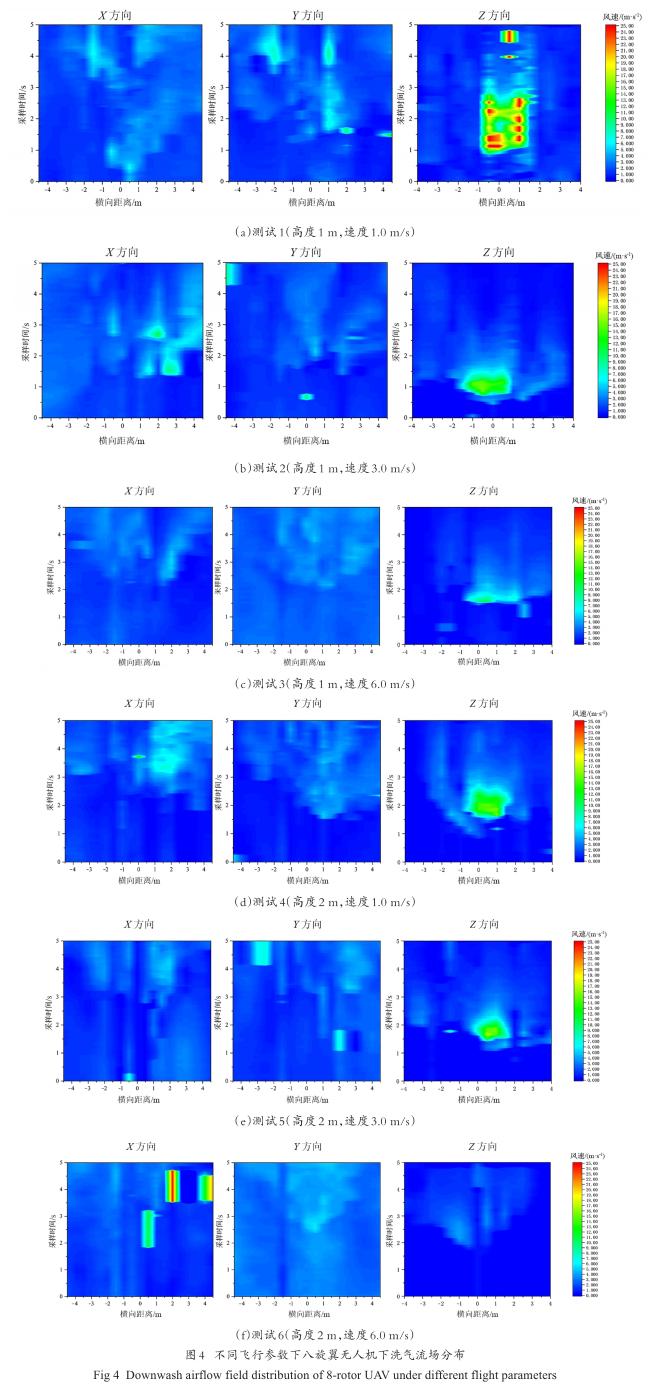
3.2 飞行参数对旋翼下洗气流场和雾滴沉积分布的影响
表3 不同飞行参数下旋翼下洗气流场与沉积分布评价指标Table 3 Evaluation indicators of downwash airflow field and spray deposition distribution under different flight parameters |
| 测试编号 | 气流场宽度/m | 风速峰值/(m·s-1) | 有效喷幅宽度/m | 喷幅内平均沉积量/(μL·cm-2) | 喷幅内沉积量变异系数/% | 有效喷幅/下洗气流场宽度比 |
|---|---|---|---|---|---|---|
| 1 | 2.9±0.3 | 25.0±0.0 | 2.5±0.3 | 0.286±0.048 | 41.0±8.1 | 0.86 |
| 2 | 5.6±0.2 | 15.6±3.1 | 3.0±0.6 | 0.070±0.012 | 45.5±6.9 | 0.54 |
| 3 | 5.0±0.2 | 11.2±1.3 | 2.0±0.3 | 0.027±0.007 | 57.1±11.5 | 0.40 |
| 4 | 5.4±0.4 | 15.6±1.2 | 4.0±1.2 | 0.140±0.026 | 56.5±13.8 | 0.74 |
| 5 | 3.7±0.1 | 16.7±5.4 | 3.5±0.3 | 0.096±0.020 | 57.9±4.8 | 0.92 |
| 6 | 3.7±0.5 | 4.0±0.9 | 2.5±0.3 | 0.020±0.004 | 47.3±7.8 | 0.68 |
|
表4 飞行参数与旋翼下洗气流场及沉积分布评价指标相关性方差分析结果Table 4 Correlation variance analysis results between flight parameters and evaluation indicators of rotor’s downwash airflow field and spray deposition distribution |
| 因变量 | 飞行高度 | 飞行速度 | ||
|---|---|---|---|---|
| 概率P | 相关系数r | 概率P | 相关系数r | |
| 气流场宽度 | 0.826 | -0.116 | 0.911 | 0.059 |
| 风速峰值 | 0.420 | -0.410 | 0.038* | -0.836 |
| 有效喷幅宽度 | 0.189 | 0.620 | 0.168 | -0.644 |
| 有效喷幅内平均沉积量 | 0.654 | -0.235 | 0.040* | -0.833 |
| 喷幅内沉积量变异系数 | 0.360 | 0.459 | 0.700 | 0.203 |
| 有效喷幅/下洗气流场宽度比 | 0.308 | 0.504 | 0.199 | -0.609 |
|
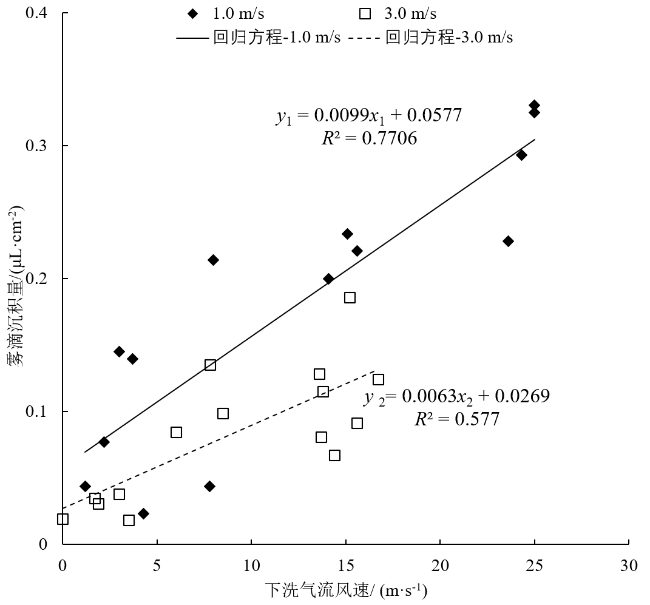
3.3 旋翼下洗气流场与雾滴沉积分布特性相关性分析
表5 各测试组旋翼下洗气流场和雾滴沉积分布情况Table 5 Distribution of rotor’s downwash airflow field and spray deposition in each test |
| 测试编号 | 下洗气流场 | 有效喷幅 | ||||
|---|---|---|---|---|---|---|
| 宽度/m | 距端点坐标/m | 宽度/m | 距端点坐标/m | |||
| 左 | 右 | 左 | 右 | |||
| 1 | 2.9 | -1.0 | 1.9 | 2.5 | -1.0 | 1.5 |
| 2 | 5.6 | -2.2 | 3.4 | 3.0 | -2.0 | 1.0 |
| 3 | 5.0 | -0.8 | 4.2 | 2.0 | -1.5 | 0.5 |
| 4 | 5.4 | -2.7 | 2.7 | 4.0 | -1.0 | 3.0 |
| 5 | 3.8 | -0.8 | 3.0 | 3.5 | -2.0 | 1.5 |
| 6 | 3.7 | -2.0 | 1.7 | 2.5 | -2.0 | 0.5 |
表6 旋翼下洗气流风速与雾滴沉积量相关性分析结果Table 6 Correlation analysis results of rotor’s downwash airflow wind speed and droplet deposition |
| 飞行速度/(m·s-1) | 概率P | 相关系数r |
|---|---|---|
| 1.0 | 0.005** | 0.887 |
| 3.0 | 0.001** | 0.760 |
| 6.0 | 0.356 | 0.283 |
|






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}