



1 引 言
近年来,无人机搭载数字成像设备[13-15]、高/多光谱成像设备[16]、LiDAR[17,18]等激光设备构成了灵活、高效的农田监测系统,已发展成为作物群体生长及营养监测的重要手段。在植株高度测定方面,LiDAR设备获取的点云密度高、精度好,具有明显的优越性[19,20]。但LiDAR设备单价高、自重大、对搭载的无人机要求高、数据处理难度大等问题制约了其从科研测定手段向农业生产应用的拓展。而高清RGB相机或光谱成像仪等成像设备与无人机结合构建的低空监测平台,可利用运动重建(Structure from Motion,SfM)算法获取被摄地物的稀疏点云,继而重构三维模型[12],最终获取被摄地物的数字表面模型(Digital Surface Model,DSM),并应用于多种作物株高测定。为消除地形因素对株高测定结果的影响,需利用播种前无作物的土壤DSM与株高测定时期的作物群体DSM进行差值计算[21-24]。此外,成像设备的影像畸变以及SfM算法影响作物群体三维重构和DSM的解算精度,利用地面控制点及其高精度地理坐标可对影像进行几何校正,从而提高DSM的精度[25]。
作为一种稀植作物,玉米植株生长发育和成熟衰老的形态结构改变会引起其群体及冠层表面结构的显著变化,对无人机成像设备重构作物群体三维结构以及解算DSM造成困难。本研究通过无人机搭载RGB和光谱成像设备监测玉米群体株高,分析不同玉米品种、不同生育阶段以及成像设备分辨率等因素对株高监测精度的影响,评价在大田玉米生产中利用无人机影像进行株高差异性监测的可行性,为研究构建适于大田作物实际应用的快速、无损且灵活性高、低成本的株高监测方法提供参考借鉴。
2 材料与方法
2.1 试验设计
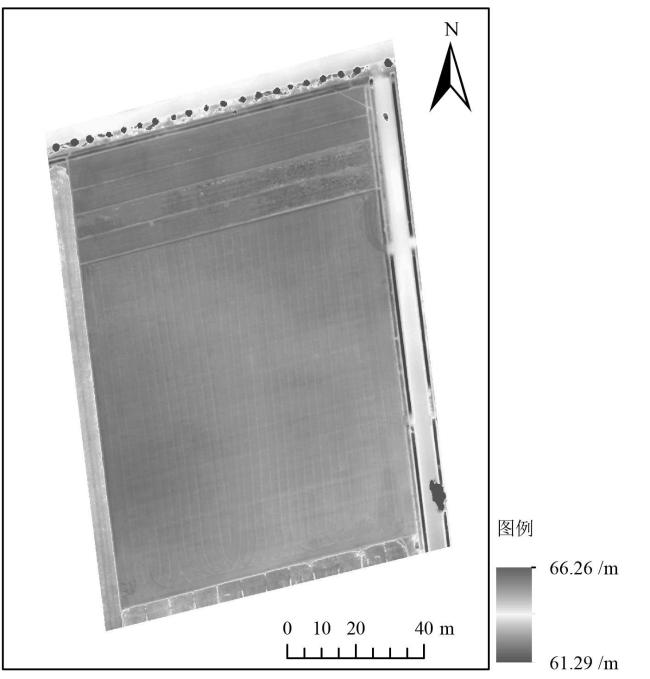
试验于2018年在中国农业科学院河南新乡综合试验站(35°07′52″N,113°45′37″E)内进行。试验地块平整,海拔高度在61.84~61.87 m之间(图1,2019年5月11日获取的试验区裸土DEM)。选用丰垦139(FK139)、京农科728(JNK728)和郑单958(ZD958)三种株高不同玉米品种,设置2018年内4月20日(B1)、4月30日(B2)、5月10日(B3)、5月24日(B4)、6月3日(B5)、6月13日(B6)、6月23日(B7)和7月3日(B8)8个播期,共计24个处理,大区种植,每个小区面积 162 m2(22.5 m×7.2 m),行距0.6 m,种植密度 75,000 株/hm2。田间管理同大田。品种及播期处理布置见图2 。

2.2 基于无人机图像的群体株高获取
2.2.1 无人机图像获取
在晴朗无云、风力小于2级的天气条件下,于2018年7月25日和8月27日上午10:00-13:00,利用DJI M600 Pro六旋翼无人机搭载高清数码相机(SONY α7Ⅱ,有效像素2430万,最高分辨率为6000 px×4000 px,SONY Sonnar T* FE 35mm f/2.8 ZA定焦镜头)和多光谱相机(Micasense Rededge MX,最高分辨率为1280 px×960 px),飞行高度设定为70 m,航向重叠率85%,航间重叠率80%,获取24个小区的高清数码RGB影像和多光谱影像。其中,7月25日各处理处于拔节期和灌浆期之间,此时各播期处理群体株高差异最大;8月27日所有处理均已吐丝,各播期处理群体株高差异最小。
2.2.2 无人机图像处理
用Agisoft PhotoScan Professional软件对无人机图像进行拼接处理,生成试验田的RGB和多光谱数字高程模型(Digital Elevation Model,DEM)。RGB图像依据DJIM600Pro无人机飞行控制系统记录的拍摄时定位定姿系统(Position and Orientation System,POS)数据进行影像拼接;多光谱数据则依据Rededge-M设备配置的全球定位系统(Global Positioning System,GPS)导航数据进行影像拼接。
影像拼接流程为:首先根据空间姿态数据和相邻影像的特征像素对图像像素进行配对,并进行姿态优化;然后逐步生成地面影像的稀疏点云和具有精确空间信息属性的密集点云;再构建监测区域表面的几何结构和DSM,解算为不同处理的玉米群体表面海拔高度信息。各处理区的植株高度以该小区DSM提取高程点的集合,去掉15%的高值与15%的低值数据点,以剩余70%的数据点平均高程值作为该小区的植株高度提取数据。利用ArcMap软件处理DSM数据并做图。
2.3 各小区群体株高人工测量方法
在不同处理的试验区内随机选取20株玉米作为定株测定样本,均匀分布于处理小区内。使用伸缩尺分别在获取无人机图像后的当天测量株高。未到吐丝期的播期处理,测量植株自然状态下最高点到地表的距离为株高;已到吐丝期的播期处理,测量植株顶端到地表的距离为株高。以20株样本的平均值近似作为该处理群体的株高。各处理在测量株高时所处的生育时期如表1 所示。
表1 获取株高数据时各播期所处生育时期Table 1 The growth period of each sowing date when the plant height was obtained |
| 播期 | 7月25日 | 8月27日 | ||||
|---|---|---|---|---|---|---|
| FK139 | JNK728 | ZD958 | FK139 | JNK728 | ZD958 | |
| B1 | AS 41 d | AS 36 d | AS 34 d | AS 74 d | AS 69 d | AS67 d |
| B2 | AS 31 d | AS 29 d | AS 26 d | AS 64 d | AS 62 d | AS59 d |
| B3 | AS 21 d | AS 18 d | AS 16 d | AS 54 d | AS 51 d | AS49 d |
| B4 | AS 10 d | AS 7 d | AS 5 d | AS 43 d | AS 40 d | AS38 d |
| B5 | AS 5 d | AS 1 d | Silking | AS 38 d | AS 34 d | AS33 d |
| B6 | V14 | V12 | V12 | AS 27 d | AS 24 d | AS22 d |
| B7 | V7 | V8 | V7 | AS 17 d | AS 12 d | AS10 d |
| B8 | V6 | V6 | V6 | AS 8 d | AS 4 d | AS2 d |
|
7月25日,B1~B5处理下,各品种均达到吐丝期,其中B1处理早熟品种FK139吐丝后41天,部分植株叶片枯萎下垂。而B6~B8处理,三个品种仍处于不同的营养生长阶段,株高差异较大。8月27日,全部播期处理下各品种均达吐丝期,其中早熟FK139在B1~B4处理下多数植株叶片枯萎下垂。持绿性较好的品种ZD958在B1处理下植株叶片枯萎下垂。
2.4 分析与统计方法
单次影像生成的DEM数据是玉米冠层顶部的海拔信息,包括植株高度和地面海拔高度两部分。由于试验地块平坦无明显起伏,各处理地面海拨高度基本一致,因此处理间冠顶海拨高度差即为株高差。但无人机航迹中记录的海拔信息为气压计高度,造成各次采集时海拔高度不一致。为使无人机测量的冠层高度与人工测量株高度具有可比性,将基于无人机的冠层顶部高度与人工测量的群体株高数据均按公式(1) 进行归一化处理:
其中,Hn为归一化后的基于图像的冠层高度或人工测量群体株高,为无量纲参数;H为需进行归一化处理的数据,m;minH为测定的最小株高,m;maxH为测定的最大株高,m。无人机监测冠顶相对高度记为Hn (i),人工测量群体相对高度记为Hn (t)。归一化处理后,各处理的冠层株高均为相对高度,数据区间范围为[0,1]。用SPSS 20.0和Microsoft Excel 2010软件进行数据ANOVA方差分析和作图。
3 结果与分析
3.1 不同处理下群体株高差异及图像表现
在不同玉米品种和播期处理,各小区人工实测平均株高结果如表2所示。各处理群体株高整体呈现出从北向南先增高后降低的变化趋势。同一品种不同播期处理间因所处生长期不同,其群体株高有显著差异。在7月25日,三个玉米品种B1~B5已抽雄吐丝,株高已固定,且各品种均表现出B1和B2的群体株高明显低于B3~B5;而B6~B8处理分别处于V6~V14的营养生长阶段,其株高低于B1~B5处理;B6~B8处理间群体株高差异大,且品种间的株高差异小于播期间的差异。而在8月27日,各处理均达到吐丝期(表1 ),也能观测到不同处理间冠层株高存在差异。
表1 7月25日和8月27日两次监测时人工测定的各小区平均株高 单位: mTable 1 Average plant height of two treatments measured artificially on 25 July and 27 August |
| 播期 | 7月25日 | 8月27日 | ||||
|---|---|---|---|---|---|---|
| FK139 | JNK728 | ZD958 | FK139 | JNK728 | ZD958 | |
| B1 | 2.3b | 2.5b | 2.1c | 2.3d | 2.5d | 2.1d |
| B2 | 2.2c | 2.6a | 2.2c | 2.1e | 2.5d | 2.2cd |
| B3 | 2.4a | 2.6a | 2.5b | 2.4bc | 2.6cd | 2.5b |
| B4 | 2.5a | 2.7a | 2.4b | 2.5ab | 2.7bc | 2.5b |
| B5 | 2.5a | 2.8a | 2.6a | 2.5a | 2.9a | 2.6a |
| B6 | 1.9d | 2.0c | 1.7d | 2.4bc | 2.8ab | 2.5b |
| B7 | 1.2e | 1.0d | 0.9e | 2.4c | 2.6cd | 2.2c |
| B8 | 0.3f | 0.3e | 0.3f | 2.1e | 2.2e | 1.9e |
|
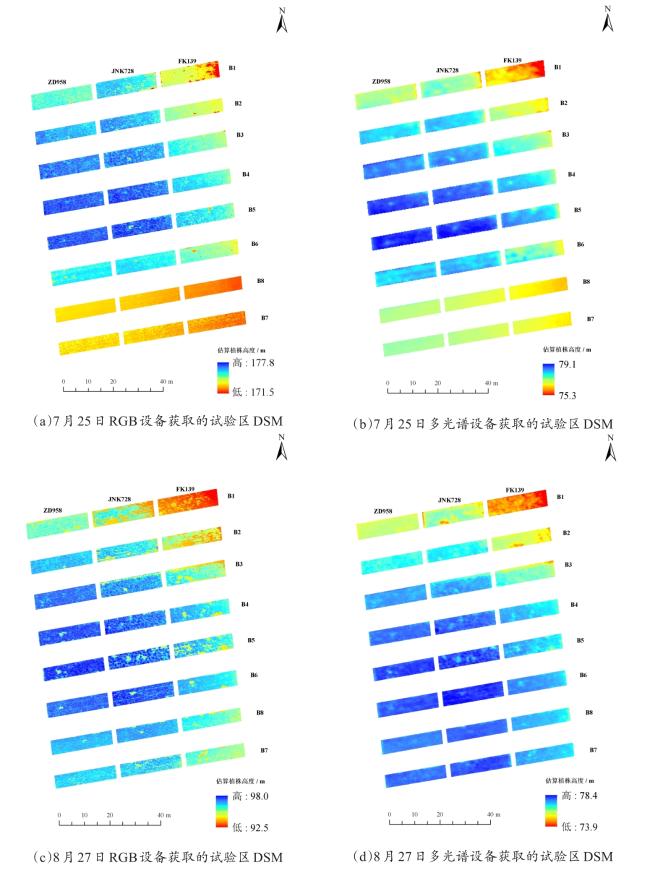
将原始DSM图像经过小区掩膜后得到各处理小区的DSM图像(图3 ),获得的两期RGB图像(图3(a) 和图3(c) )和多光谱图像(图3(b) 和图3(d) )中各处理群体高度的变化均与人工测量的各处理株高变化(表2)具有相同趋势,表明基于无人机图像方法可反映群体高度差异变化。
3.2 无人机影像监测群体高度与人工实测株高间的关系
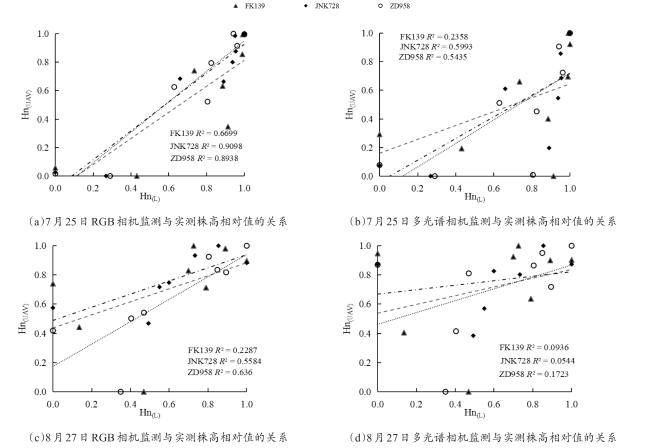
将RGB图像和多光谱图像中各处理平均高度与实测株高进行归一化,对各处理基于无人机图像的归一化平均高度Hn (UAV)与人工测量株高归一化Hn (L)进行相关分析。结果如图4 (134页)所示。由于在7月25日各播期处理所处生育时期不同,各处理群体高度之间差异较大,在图像中这种差异表现明显,RGB图像平均高度归一值Hn (UAV)同人工实测株高归一值Hn (L)在7月25日(图4(a) )极显著相关(r = 0.839);在8月27日,各播期处理均达到其株高的最大值处理间群体株高差变小,基于RGB影像的冠层高度Hn (UAV)与人工测量的株高Hn ( L )之间相关关系仍达显著水平(图4(c) ),但相关系数较低,仅为0.461。基于多光谱影像的冠层高度与人工测量株高间也存在类似关系,其中,7月25日两者达到极显著相关(图4(b) ),但相关系数(r =0.587)低于RGB图像,说明除处理差异外,传感器精度同样影响图像测量精度;而8月27日,各处理株高达到最大值,处理间的株高差异较小,同时又受到传感器精度的影响,基于多光谱图像的高度监测结果表现较差,与人工测量高度间的相关性未达显著水平(图4(d) )。说明在不同处理间株高差异较大的情况下,利用高清数码相机(RGB)和多光谱相机可实现群体高度测量,且RGB图像测量精度优于多光谱相机。但当处理间高度差异变小时,两种相机测量群体高度的误差将增大,特别是多光谱相机更为明显。
3.3 影响图像监测高度的因素分析
在品种和播期处理下,各区株高具有显著差异(表2)。对两次测量的各处理基于图像的冠层高度归一化值Hn (UAV)和各处理人工测量株高归一化值Hn (L)的相关分析表明(表3 ),RGB图像监测结果与实际株高的相关程度均高于多光谱图像,且两个测量时期间以及不同品种间表现出差异。在7月25日测量的RGB图像中,JNK728和ZD958品种的Hn (UAV)与Hn (L)间均为极显著相关,相关系数r均达到0.9以上,FK139显著相关,r达到0.818。而多光谱图像中群体归一化高度Hn (UAV)与人工实测株高Hn (L)间,仅JNK728和ZD958显著相关(r分别为0.774和0.737),FK139则相关性不显著,相关系数r为0.486。在8月27日的测量中,RGB图像的Hn (UAV)与Hn (L)间除ZD958达到显著相关(r =0.797)外,其余两个玉米品种均不显著,而基于多光谱图像的Hn (UAV)与Hn (L)间,三个玉米品种均未达到显著相关。表明玉米品种类型与其发育时期影响两种相机对群体株高的测量,同时也说明利用RGB图像监测群体高度对品种和发育时期的适应性更广。
表3 不同玉米品种归一化图像高度与人工实测株高特征参数Table 3 Normalized image height of different cultivars and characteristic parameters of artificially measured plant height |
| 测量日期 | 品种 | 相关系数 | |
|---|---|---|---|
| RGB图像 | 多光谱图 | ||
| 7月25日 | FK139 | 0.818* | 0.486 |
| JNK728 | 0.954** | 0.774* | |
| ZD958 | 0.945** | 0.737* | |
| —— | 0.900** | 0.672** | |
| 8月27日 | FK139 | 0.478 | 0.306 |
| JNK728 | 0.549 | 0.272 | |
| ZD958 | 0.797* | 0.415 | |
| —— | 0.604** | 0.332 | |
|
不同播期玉米群体株高的差异实质上是玉米处于不同发育阶段或因生长发育处于不同光温条件造成的植株高度差异,这种差异通过图像方法可很好地表达出来(图3 )。在7月25日获取的不同播期条件下RGB图像结果与人工测量株高极显著相关,相关系数达到0.9。而在8月27日,基于图像的群体高度与人工测量株高间归一化相关性减弱。通过比较两次测量时期不同处理所处的发育时期发现,7月25日测量,各处理发育时期处于V6——吐丝后41天,植株均未成熟,冠层叶片均为绿色;8月27日测量,各处理处于吐丝后2天到吐丝后72天,其中有8个处理处于吐丝后50天以上,即8个处理已成熟,而成熟期玉米叶片枯黄较多,可能影响测量结果,也是导致多光谱相机测量效果变差的主要原因。说明测量时期对基于图像的植株高度测量有显著影响。
4 讨 论
利用无人机搭载光学成像设备进行作物生长和营养诊断是当前精准农业研究的热点,植株高度监测是较早开展且技术较为成熟的应用之一[13-16]。SfM是一种三维重建的方法,用于从运动(motion)中实现3D重建[12]。利用无人机沿航线运动过程中拍摄时间序列作物影像集,经过特征提取、影像配准、全局优化以及数据融合等关键步骤,能够重构地面作物群体的三维模型。结合无人机惯性测量单元(Inertial Measurement Unit, IMU)和GPS等机载系统提供影像的空间姿态和位置信息,从而获得作物冠层的DSM[12,20-22]。相比其他株高监测方法,该方法所需仪器设备价值低、监测精度尚可且无损高效,具有在生产中大规模应用的潜力[18,19]。
本研究基于当前精准农业研究中普遍应用的高清数码相机和多光谱成像设备获取群体DSM数据,比较不同品种和播期处理下玉米群体株高的DSM差异。研究结果表明,DSM信息反映的群体高度差异与实测植株高度差异显著相关,由高清RGB相机监测并获得的群体高度差异数据与实测植株高度差的相关性更高,监测精度优于多光谱成像设备。第一次(7月25日)监测时,由于各播期处理的生育进程不同,群体的株高差异明显。两种成像设备获取的DSM数据均与实测株高显著相关。而在第二次(8月27日)监测时,各播期处理均已达抽雄期,植株高度不再变化,此时群体株高差异是由关键生育阶段气候环境因素不同造成的,多数处理间的株高差异在40 cm以内,第二次监测两种设备获取的DSM高度差与实测株高差之间相关性均不显著,这可能与监测精度不足,难以反映较小株高差异有关。
无人机监测株高的精度受影像质量、定位信息精度和SfM三维模型重构算法等多方面因素影响。成像设备的图像分辨率和镜头畸变对后续作物三维模型重构影响较大,图像分辨率高、且无明显畸变时,作物影像的细节更丰富、易于影像时间序列特征点匹配。SfM方法能够生成更精细的点云信息,从而提高作物三维模型的重构效果。在地面建立经过精确测定海拔和定位坐标的标志点体系,能够帮助SfM方法纠正影像畸变,在一定程度上消除影像集POS信息精度不足造成的DSM高程数据偏差,也是提高无人机监测精度的有效手段[25]。同等测定条件下,高清数码相机具备像素分辨率更高的精度优势,其估算的群体株高相关性优于多光谱影像分析估算的群体株高。基于DSM提取的群体高程包含土壤高程和作物群体株高两部分信息,在高程起伏较大的地块,结合裸土DEM和群体发育后的多时相DSM进行插值分析是获取株高信息的必要步骤。但影像POS信息纪录的高程数据是无人机获取的气压计高度,不同监测日期的气压计高度差异较大,如无地面标志点辅助矫正则难以准确匹配土壤DEM与作物DSM之间的高程差,造成株高监测的困难[25]。本研究针对平坦地块尝试利用单次监测影像提取不同处理间的植株高度相对差异,两次(7月25日和8月27日)监测数据未利用地面标志点进行几何校正。图3 结果显示,两种监测设备在两次监测之间具有较大的海拔高度差异,特别是RGB高清相机的监测结果,由于直接采用无人机POS数据生成DSM数据,两次监测间的海拔高度相差近80 m。而多光谱成像仪影像中记录的是GPS测定的海拔高,稳定性相对较好,但依然高于地块实际海拔高度10 m以上。例如图1 显示经过RTK配准的试验地海拔高度为61.8~61.9 m,图3(b) 和图3(d) 两幅显示多光谱设备监测的冠层DSM为73.4~79.1 m。
三维模型的重构精度与获取的图像序列间匹配产生的点云密度密切相关。而受影像分辨率和SfM算法精度的限制,冠层上部器官的细节往往因无匹配的特征点从而被忽视,造成DSM细节缺失和株高被低估的现象[25]。本研究发现,在生育前期或后期,因个体较小或叶片枯萎下垂造成群体稀疏时,利用DSM估算群体株高的精度显著下降。于2018年5月11日监测生成的图1 反映了试验地块的平整性,此时已有两个播期处理播种并出苗,但因幼苗矮小且相对稀疏,测定的土壤DEM在播期1、2与其他未播种地块的高程几乎无差异。当玉米群体生理成熟后,玉米叶片枯黄下垂,冠层表面粗糙度增加,对于重构形成DSM造成困难,例如FK139品种的熟期较早,在第一次监测时,播期1处理的FK139小区植株高度估算与尚在V6时期的播期8处理监测高程几乎相同。因此,在群体发育较小尚未形成密集冠层的生育阶段以及叶片枯萎下垂的中后期,利用无人机SfM方法监测株高时会存在较严重的监测精度下降问题。
5 结 论
本研究分析了在大田生产中应用无人机搭载成像设备监测群体株高的精度与存在的问题。通过航拍影像分析获取作物群体DSM,不同品种和播期处理区平均DSM高程与实测株高具有极显著相关性。结果表明,在平坦地块利用单时相DSM能够定性分析群体株高差异,但因植株个体较小或茎叶枯萎的稀疏群体,株高监测精度明显下降。相同条件下,像素分辨率更大的成像设备获取的图像估算群体株高与实测株高相关性更高。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}