



1 引 言
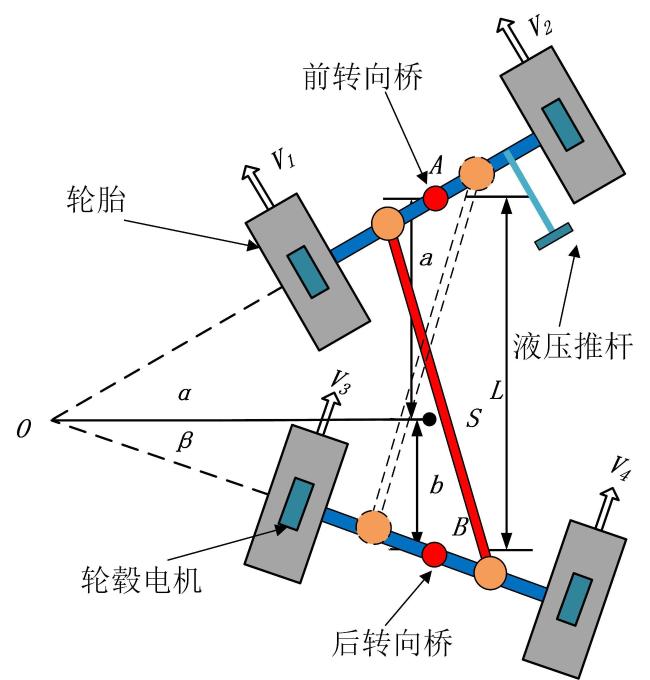
安全行驶和路径跟踪是无人驾驶农机核心研究问题,控制算法的优劣将直接影响农机自动导航的精准度和农机装备的稳定运行,进而影响到农机作业效果和生产效率。农业复杂的作业环境不仅会降低农机装备跟踪路径的精度,同时会对农机装备安全运行产生不良影响,甚至造成农机侧翻倾倒事故发生[5]。近年来,国内外研究者针对路径跟踪控制进行了深入的研究[6]。Song等[7]考虑纵向速度和道路曲率对低速复杂驾驶条件下喷雾机轨迹跟踪稳定性的影响,设计了时变模型预测控制(Model Predictive Control,MPC)器以提高轨迹跟踪精度。Liu等[8]提出了一种新的基于双连续投影法的无模型自适应控制算法来解决装置的横向跟踪控制问题。Lenain等[9]通过考虑扩展的运动学模型明确考虑了滑动效应问题,提出了一些依赖于自适应和预测性并基于观测器控制的发展,专用于农用拖拉机的自动引导。张华强等[10]提出了基于纯追踪算法的路径跟踪控制改进算法,通过群粒子算法实时确定纯追踪模型的前视距离,提升农机作业时的直线跟踪精度。王辉等[11]提出了一种基于预瞄追踪模型的农机导航路径跟踪控制方法,有效提高了农机对复杂路面的抗干扰能力。刘兆明等[12]针对雷沃高地隙喷杆喷雾机提出了一种以位置偏差和航向偏差为状态变量的直线路径跟踪控制算法,喷雾机能够自动完成直线、地头转弯行驶和喷雾作业。白国星等[13]从非线性模型预测控制出发,提出了两种实时性优化方案,保证控制器在跟踪曲率、航向变化较快的参考路径时的控制精度。刘正铎等[14]提出了一种基于非线性模型预测控制的路径跟踪控制方法,有效减小横向偏差。上述文献均未考虑复杂作业环境下,农机滑移对农机稳定运行程度和路径跟踪精度产生的影响。因此,克服农机在复杂恶劣多变作业环境下打滑、陷坑等问题,实现智能农机的稳定运行与高精度跟踪是农机路径跟踪控制的首要任务。为解决上述问题,课题组研制了一款四轮独立驱动(Four Wheel Independent Drive,4WID)高地隙喷雾机(图1 )。其采用前后双转向桥、轮毂电机分布式4WID的底盘系统,如图2 所示[15],具有驱动力强、转向半径小等优点。液压推杆、连杆的辅助转向装置能保证喷雾机在泥泞田间或水田作业时,前后轮运行轨迹高度一致。以此4WID高地隙喷雾机为研究对象,采用MPC实现对其路径跟踪控制。同时考虑到喷雾机在泥泞田间作业时驱动轮滑移对路径跟踪控制的影响,加入模糊控制器对驱动轮的滑移率进行控制,提高路径跟踪精度。

图1 高地隙四轮独立驱动电动喷雾机Fig. 1 High ground clearance four wheel independent drive(4WID) electric sprayer |
2 喷雾机运动学模型
2.1 喷雾机差速转向运动学模型
高地隙4WID喷雾机通过独特的前后双转向桥结构、轮毂电机差速协同实现转向,转向半径小,且前后轮运行轨迹高度一致。喷雾机具体参数如表1 所示。
表1 4WID高地隙喷雾机参数Table 1 Parameters of 4WID high ground clearance sprayer |
| 参数 | 数值 |
|---|---|
| 质量/kg | 2170 |
| 宽度/m | 1.95 |
| 长度/m | 1.7 |
| 轮胎半径/m | 0.47 |
| 驱动轮转动惯量/(kg·m2) | 0.66 |
| 连杆长度/m | 1.49 |
| 喷杆长度/m | 12 |
| 药箱容量/L | 500 |
| 喷施量/(L·min-1) | 5~10 |
| 最大转向角/(°) | 24 |
通常情况下,喷雾机进行植保作业时,行驶速度较低,因此本研究不考虑喷雾机侧偏以及横摆的稳定性问题,仅考虑其路径跟踪问题。按照图2 喷雾机底盘驱动结构,根据Ackermann-Jeantand转向原理[16],可得喷雾机转向角和四驱动轮速度关系如公式(1 )~(4 )所示。
其中,α,β分别是喷雾机的前轴转向角和后轴转向角,(°);a是前悬架中点到喷雾机质心的距离,m;b是后悬架中点到喷雾机质心的距离,m。喷雾机的底盘结构对称,在转向时前后桥转角相等,方向相反。V是喷雾机行进速度,m/s;V 1~V 4分别为喷雾机四个驱动轮的速度,m/s。通过控制喷雾机四个驱动轮的速度从而达到控制车速和转向运动,实现预期路径的跟踪。
由于喷雾机车的作业环境复杂,仅依靠四驱动轮的差速转向,在通过泥泞水田或陷坑路面时不能实现可靠转向并保证前后轮轨迹高度一致,因此采用了连杆及液压推杆的辅助转向装置,在复杂环境下也能减小转向角受到路面条件的影响。转向角δf和液压推杆长度lt的关系如公式(5) 所示。
2.2 喷雾机驱动轮动力学模型
在复杂的道路情况下,为了更好地分析驱动轮的状态,建立如图3 所示的喷雾机驱动轮动力学模型。
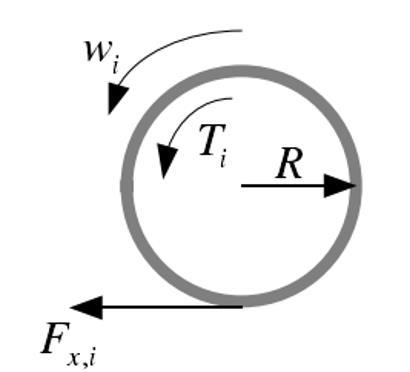
忽略空气阻力等干扰,可以得到喷雾机驱动轮动力学方程,见公式(6) 。
驱动轮转矩可表示为:
其中, 为驱动轮角加速度,rad/s2; Ti为驱动转矩,N·m;R为驱动轮载荷半径,m; Tb为滚动阻力矩,N·m;F 1为轮胎纵向力,N;J为驱动轮转动惯量,kg/m2。如公式(8) 所示,M是喷雾机驱动轮质量。
2.3 喷雾机的线性时变运动学模型
选取喷雾机中心点的纵向速度作为整机纵向速度。选取喷雾机在全局坐标系下X轴的位置,Y轴的位置和航向角φ为状态量;喷雾机纵向速度vr和转向角δf为控制量。喷雾机长度为l。基于运动学原理,可得喷雾机整机速度、转向角、全局坐标系中位置关系如公式(9) 所示。
选取状态量 x =[X,Y,φ]T,控制量 u =[vr,δf]T,则喷雾机状态空间方程为:
为简化模型,将模型线性化,选取参考状态量x ref,利用泰勒公式在x ref处展开,将公式(10) 改写为增量形式,可得到如公式(11) 所示关于状态量x误差x͂的状态空间方程。
其中, A、 B分别为f关于x、u的雅可比矩阵。
通过前向欧拉法将公式(11) 离散化,此喷雾机运动学模型可近似视为一个线性时变(Linear Time-Varying Systems,LTV)系统,如公式(12) 所示。
可得,
其中,
3 LTV-MPC路径跟踪控制
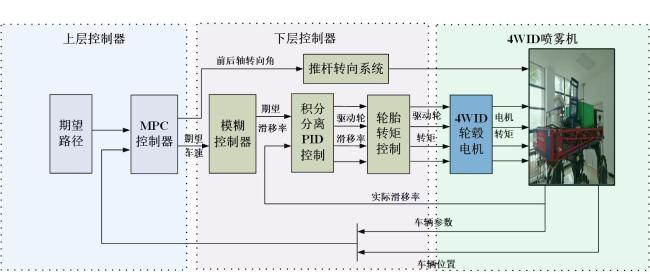
采用如图4 所示的分层控制结构控制喷雾机跟踪路径,上层控制器采用线性时变模型预测控制(LTV-MPC)实现喷雾机跟踪路径,下层控制器中考虑驱动轮滑移对喷雾机跟踪精度的影响,采用模糊控制对驱动轮的滑移率进行控制,通过积分分离式PID控制减少喷雾机在启动过程中所产生的较大滑移率。
3.1 路径跟踪的MPC
为防止出现系统的控制量突变,影响喷雾机路径跟踪精度和稳定性,用控制量增量取代控制量。修改后的状态方程表现形式如下。
其中,k|t表示t时间对k时间的预测。
设置系统的状态量如公式(15) 所示。
其中, η=[X,Y,φ]T为离散系统的输出量。X为喷雾机横轴位置,m;Y为纵轴位置,m;φ为喷雾机航向角,(°)。
可得到用于MPC的状态空间方程。
其中,
其中,m=2是控制量维度;n=3是状态量维度,k 1 、k2、k 3为三个状态量误差的权重比。 A k,t, B k,t含义与公式(13) 相同, c͂ k,t为系统的输出矩阵。
考虑到实际喷雾机中采用液压推杆实现转向,其本身具有较大的响应时间。同时,低速行驶的农药喷洒作业对系统动态性能要求并不高,而对作业路径跟踪精度的要求较高,MPC输出转向角如出现较大超调势必会影响路径跟踪精度。考虑到以上两种因素,在MPC器设计时,通过控制量及增量的约束,以符合喷雾机转向系统的实际情况,同时避免转向角出现较大超调,利于喷雾机路径跟踪精度的提升。
其中,Np是系统的预测时域;Nc是系统的控制时域; Q为系统状态量的权重矩阵; R为系统控制量的权重矩阵。 为控制量增量矩阵,η为系统的输出量。
综上考虑,设置目标函数的约束条件如下。
其中,(a)为系统的离散线性时变运动学模型,(b)为系统的状态量,(c)为系统的控制量,(d)为控制量约束,(e)和(f)为控制量增量约束。
3.2 基于LTV-MPC的控制器设计
将预测方程进行迭代,设置系统的预测输出,如公式(23 )~(26 )所示。
其中,Np为预测时域; 为控制量增量矩阵; Y为系统的输出量矩阵; 和 θ t为方程的迭代矩阵。
为便于使用MATLAB对目标函数二次规划求解,将公式(21) 转化成公式(27) 所示的标准形式。
其中,E=Ψtζ(t|t)。ε为松弛因子; Q为系统状态量的权重矩阵;Y, ,θt含义与公式(23) 相同。由于△ U无法对E进行控制,在求解二次规划过程中忽略E T Q E项。为简化计算,将控制序列中的第一个控制量输出给被控系统,作为实际的控制量。在下一个采样时刻(T+1时刻)重复上述步骤,实现滚动优化。
3.3 驱动轮滑移率的模糊控制
3.3.1 驱动轮滑移率分析
在Adams/Car中搭建轮胎特性实验平台,测量轮胎滑移率与轮胎纵向力之间的关系。设置驱动轮的纵向侧偏刚度Cl=10,000,横向侧偏刚度Cα=8000。并通过Adams/Car中的Tire Testrig模块确定驱动轮纵向力和滑移率关系,如图5 所示。
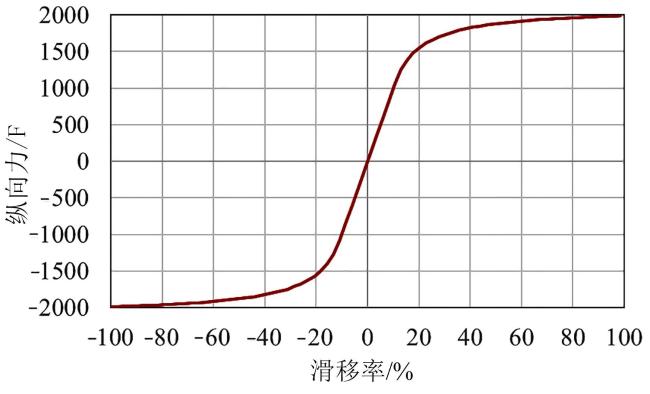
由图5 可知,驱动轮滑移率在±20%之内,轮胎纵向驱动力与滑移率近似呈线性关系,可近似表示为公式(29) 。
其中,F l为驱动轮轮胎纵向力,N;s为滑移率,%,其定义为:
其中, R, , 含义与公式(6) 相同。
将公式(29) 和公式(30) 代入公式(7) ,可得:
在田间复杂作业环境下,应控制轮毂电机输出的驱动力矩,将驱动轮的滑移率控制在±20%内,一方面喷雾机可充分利用作业路面的附着条件获得较大纵向驱动力;另一方面,可有效避免由于驱动轮打滑空转而产生的“刨坑”现象,导致喷雾机整机沉陷或侧倾的危险概率增加。
3.3.2 模糊控制器设计
模糊控制器中将喷雾机的速度偏差e∈[-1,1]作为模糊控制器输入,输出变量u∈[-0.2,0.2]作为喷雾机轮胎的期望滑移率s。经过模糊量化处理,根据隶属度函数建立模糊语言变量和论域之间的关系。e和u的论域与七个量化等级的隶属度函数,如图6 所示。控制规律为“if A, then B”形式,采用Mamdani法建立模糊控制规则库(表2 )。采用MIN-MAX-重心法进行去模糊化,转化为精确量输出。
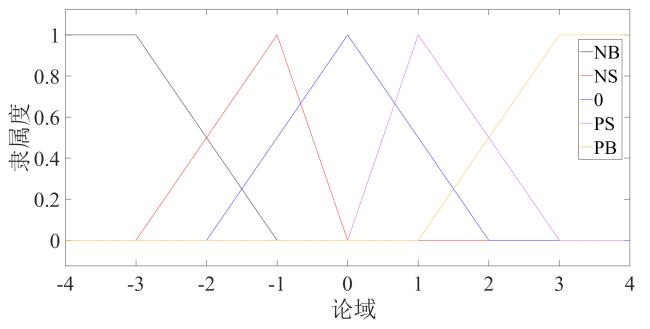
{NB,NS,0,PS,PB}
4 仿真结果与分析
运用MATLAB/Simulink搭建基于LTV-MPC的控制器和滑移模糊控制器,与Adams View搭建的喷雾机模型进行联合仿真。MPC器参数设置如表3 所示。积分分离PID控制器参数设置如表4 所示。
表 3 模型预测控制器参数Table 3 Model predictive controller parameters |
| MPC器参数 | 数值 |
|---|---|
| 采样时间/s | 0.05 |
| 控制时域Nc | 30 |
| 预测时域Np | 60 |
| 权重矩阵 Q 权重矩阵 R 车轮转角上限/rad 车轮转角下限/rad 车轮转角增量上限/rad 车轮转角增量下限/rad 松弛因子 | 200× 30× 0.436 -0.436 0.05 -0.05 100 |
表 4 积分分离PID控制器参数Table 4 Integral separation PID controller parameters |
| 控制器参数 | 数值 |
|---|---|
| 采样时间/s | 0.05 |
| 阈值ε | 0.1 |
| 比例控制kp | 5 |
| 积分控制ki | 1.6 |
| 微分控制kd | 0.8 |
本研究以对开路面的U型路径和3D随机路面的8字形路径两种工况进行了分析。
4.1 工况一:对开路面的U型路径跟踪
设置喷雾机左右驱动轮的路面附着系数分别为0.3和0.7的对开路面[24]。参考路径依然为连续的U型弯,半径为10 m。
喷雾机在对开路面情况下的横向偏差和跟踪的实际情况如图9 和图10 所示。在对开路面情况下跟踪路径的过程中,驱动轮滑移对喷雾机横向偏差产生影响。仅依靠LTV-MPC,在喷雾机启动和转向过程中,驱动轮滑移致使喷雾机转向角会产生较大超调,因而对整机的路径跟踪精度产生影响,最大横向偏差为0.032 m;加入滑移率模糊控制器后,能够减少转向角的超调,最大横向偏差为0.018 m,提高了喷雾机在复杂作业环境中路径的跟踪精度。
4.2 工况二:3D随机路面的8字形路径跟踪
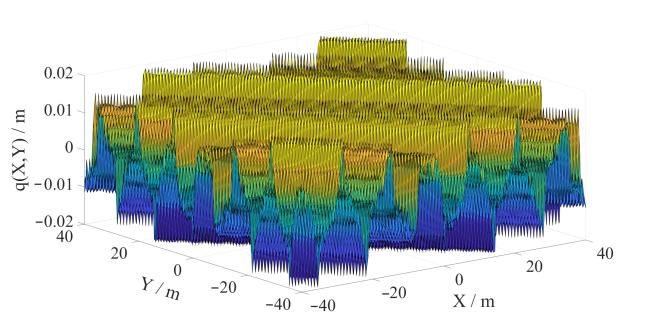
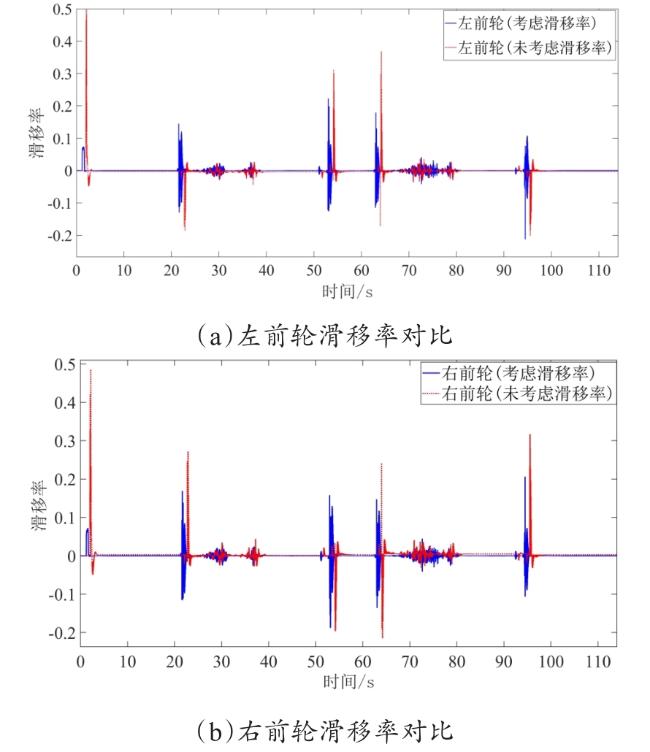
在C等级随机路面情况下喷雾机驱动轮的滑移率如图12 所示。由于路面起伏不平,驱动轮和地面的接触面积减小,更易导致驱动轮产生过度滑移,降低喷雾机的稳定性和跟踪性能。在启动过程中,喷雾机产生±20%左右的滑移率,在跟踪直线的过程中,由于路面平整度发生变化,驱动轮的滑移率有一定波动,但能控制在±20%之内;在转向的过程中,由于存在侧倾作用对喷雾机稳定性产生影响,驱动轮的滑移率有较大波动,滑移率能够基本保持在±20%内。

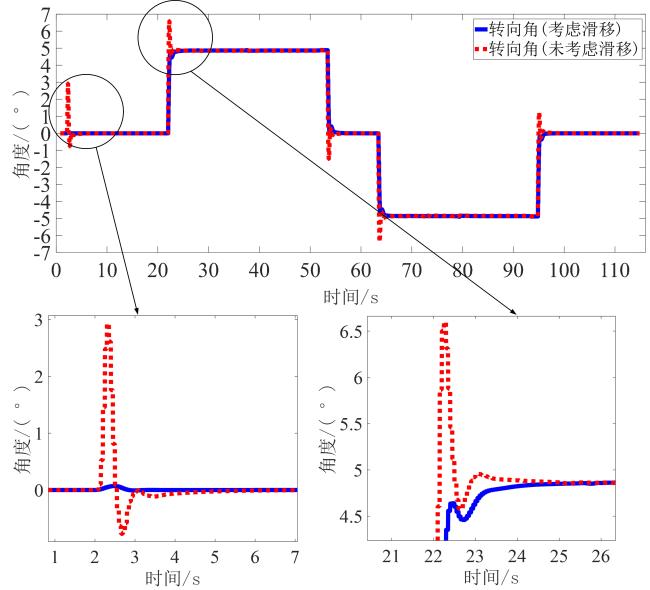
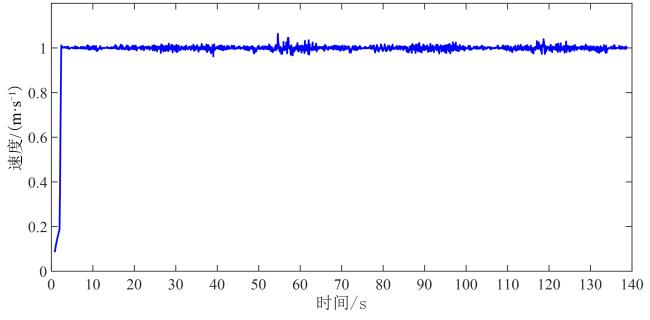
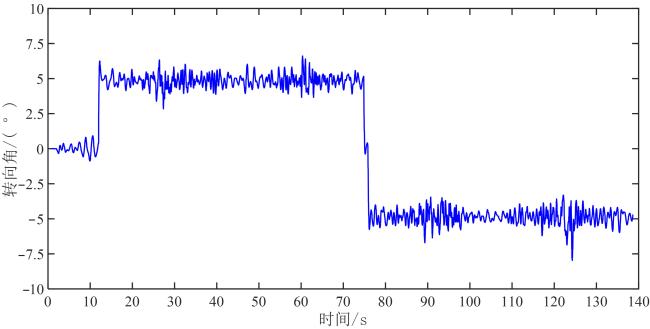
C级平整度随机路面情况下喷雾机的车速和转向角的波形如图13 和图14 所示。驱动轮发生滑移会对车速和转向角产生影响。由于路面不平整,在跟踪路径的过程中,喷雾机的速度和转向角会发生波动,但控制算法能够及时对驱动轮转矩和转向角进行调整,控制喷雾机的车身姿态,防止喷雾机偏离预期的参考路径。转向角的波动较大,最大转向角为7.71°。
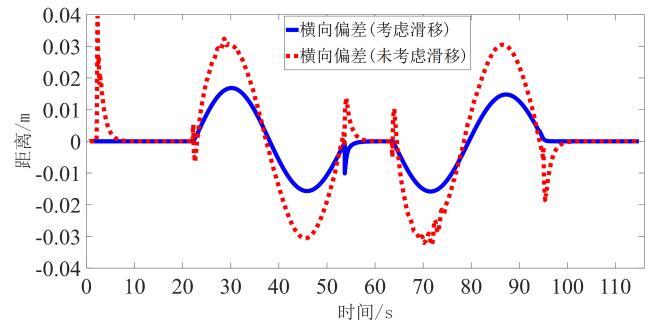
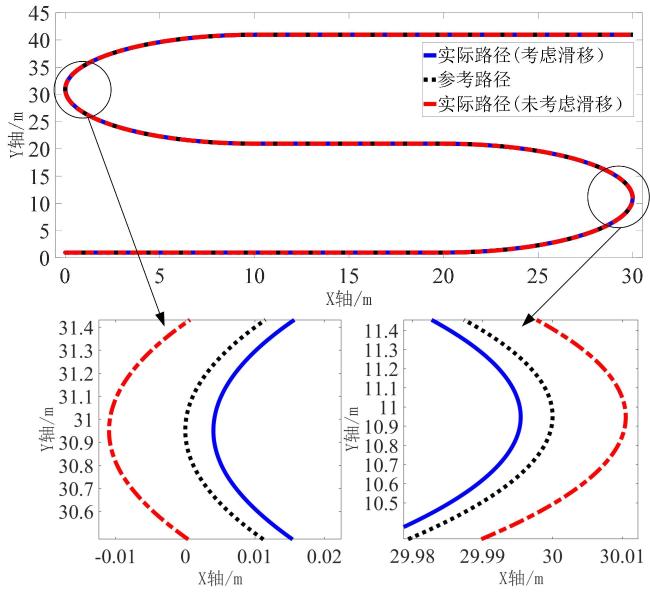
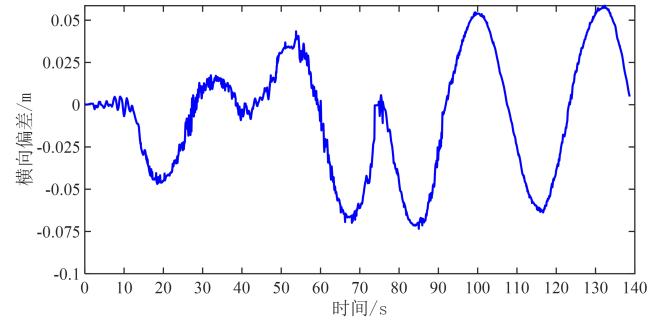
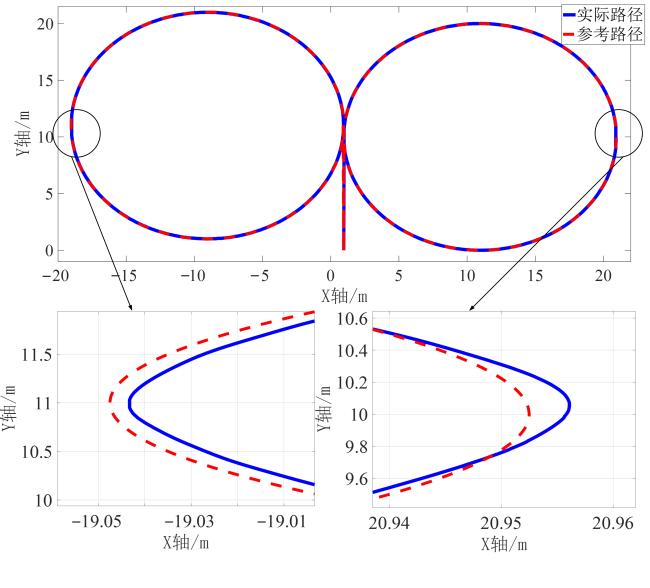
C级平整度随机路面情况下的喷雾机的横向偏差如图15 所示。在启动过程中,喷雾机产生较大的滑移率,导致车速和转向角发生波动。因此在跟踪直线的过程中,喷雾机横向偏差发生波动,最大横向偏差0.0057 m。喷雾机在转向的过程中,由于路面不平整,存在侧倾作用对喷雾机稳定性产生影响,转向角连续波动导致喷雾机的横向偏差偏大,最大横向偏差为0.058 m。在C级平整度随机路面情况下的跟踪路径结果如图16 所示。喷雾机在复杂的工况条件下依然能够准确的跟踪期望路径,通过控制驱动轮的滑移率,防止驱动轮出现打滑空转,提高了喷雾机的稳定性和控制精度。结果表面该控制算法能够满足复杂工况条件的要求。
5 结 论
本研究针对4WID高地隙喷雾机独特的前后双转向桥与4WID的同步转向结构,分析并建立了基于MPC的LTV运动学模型;考虑到驱动轮发生过度滑移会降低喷雾机的稳定性和跟踪路径精度,以MPC和模糊滑移率控制构成了分层的4WID喷雾机的路径跟踪控制策略,提高喷雾机在泥泞湿滑等复杂农田作业环境下的路径跟踪精度。Adams/Matlab仿真结果表明,本研究提出的基于LTV-MPC和滑移模糊控制的控制器在复杂作业工况下,控制喷雾机的稳定性和跟踪精度均优于仅依靠LTV-MPC方式就行控制,能够减少喷雾机转向角的超调,快速精准地控制车速和转向角,同时将驱动轮滑移率控制在±20%之内,有效减少了跟踪路径的横向偏差,提高了喷雾机在复杂作业环境下的路径跟踪精度。
后续将搭建日本艾安得A&D控制仪表(A&D5436)实验平台对本研究提出的路径模型预测控制进行实验验证。同时将进一步讨论喷雾机由于垂直载荷的变化产生的侧倾对喷雾机的稳定性和控制精度的影响并在模型中加入针对侧倾的综合等效约束。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}