



1 引 言
基于深度学习的神经网络目标检测方法在农产品检测领域中得到广泛应用[4]。Jordi等[5]使用Mask R-CNN实例分割网络实现苹果的检测和分割。刘志军等[6]将轻量化改进YOLOv5网络部署在无人机上实现了树上苹果的检测。Ji等[7]对MobileNetV3-Small网络进行改进,利用鲸鱼算法优化模型比例系数,优化后的模型识别多类苹果的平均精度达到94.43%。穆龙涛等[8]对Faster R-CNN中主干特征提取网络进行改进后,其对猕猴桃平均识别精度达到94.75%。在荔枝检测研究中,陈燕等[9]改进YOLOv3网络检测荔枝串,平均精度均值达到94.3%。彭红星等[10]改进SSD(Single Shot MultiBox Detector)网络对无人机拍摄的荔枝图像进行小目标检测,改进后的网络平均精确率在55.79%,比原始方法提高了约30%。
为了探索自然环境下成熟火龙果的精准识别和快速检测方法,针对现有研究方法存在的技术问题,本研究通过引入注意力机制,提出了一种基于改进YOLOX网络的火龙果目标检测算法,该方法在复杂背景下具有较好的鲁棒性,适合自然环境下火龙果的目标检测,其结果可为其他复杂环境下水果的快速识别提供一定的参考。
2 材料与方法
2.1 试验数据获取
由于缺少可直接使用的火龙果数据集,本研究在广州市增城区和从化区火龙果种植园拍摄火龙果图像,时间为2021年7月17日(晴天)和2021年10月17日(遮阴天)。拍摄设备为CANON EOS M100相机,成像距离为50~150 cm,自动曝光,图像分辨率像素为2400×1344,以*.JPG格式存储。共采集原始图像1976张,包括在晴天顺光、晴天逆光、阴天视角下的整株多果和任意单果图像(图1 )。为降低重复图片数量以及无果实图片对模型训练的干扰,使用人工筛选的方法对采集到的原始图像进行数据清洗,清洗后得到总计1744张包含火龙果的原始图像。


(a)晴天逆光 (b)晴天顺光 (c)阴天
2.2 数据集准备
使用开源LabelImg工具手工为图像中的火龙果添加标签,并参考Pascal VOC制作数据集,标签名称为Dragon_fruit。标签原则为在视野范围内,根据火龙果表面颜色信息进行人工标记。具体为:对表皮红色像素面积超过90%的火龙果进行标记,不考虑绿色果实;有遮挡的火龙果,人工估计被遮挡区域进行标记;视野内存在较远处的果实,若像素面积过小(≤20×20)则不进行标记。
2.3 数据集扩充
数据集扩充可以有效地扩展样本的多样性,保证模型在不同环境下具有较高的鲁棒性。在本研究中,使用了旋转、翻转、添加噪声、模糊等操作将数据集扩充至5232张。
3 识别网络模型构建
YOLO(You Only Looks Once)算法是一阶段目标检测算法的代表之一,由于实时检测速度快,检测精度高,在农业领域的目标检测和识别中得到广泛应用。YOLOv1~YOLOv5均是基于锚框的探测器,需要手工预先设定锚框大小的分配规则。
3.1 YOLOX网络模型
由于本研究是针对采摘机器人在田间自然环境下的实时检测,因此研究的目标检测网络需要考虑的主要因素有模型大小是否易于在嵌入式设备上部署,在复杂光照及背景条件下检测精度和推理速度。YOLOX是Ge等[19]提出的单阶段目标检测算法,它将目标区域预测和目标类别预测集成到一个单一的神经网络模型中,融合了YOLO系列网络的优点,创新地添加了收敛速度更快、精度更高的解耦头、并引入无锚框(Anchor free)方法和SimOTA(标签分配策略)动态正样本匹配等[20-22],实现了高精度的快速目标检测和识别。同时,YOLOX有多种基准的型号用于不同的应用场景,例如YOLOX-X、YOLOX-L和YOLOX-Darknet53等标准型号和采用深度可分离卷积构建的轻量化型号。
3.1.1 网络结构
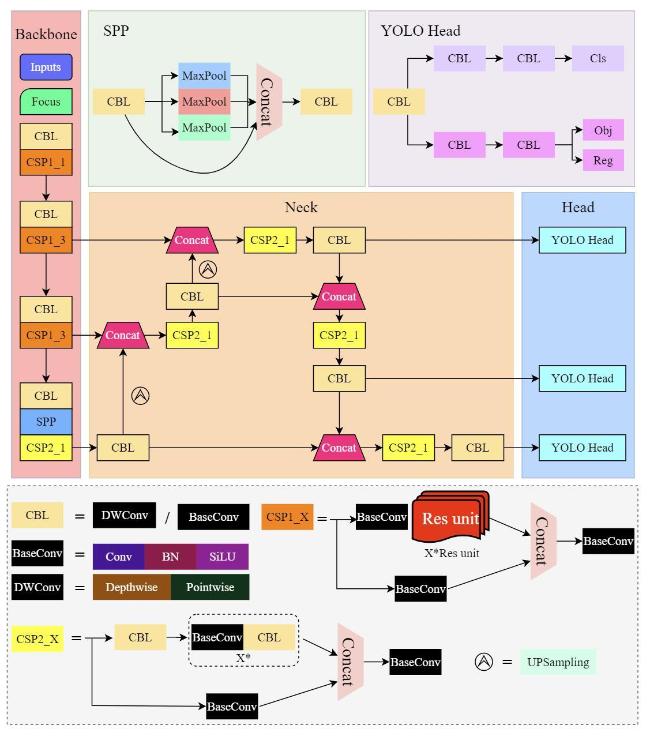
YOLOX使用CSPDarkNet作为主干特征提取网络。输入图像在主干特征提取网络中进行特征提取,提取到的特征可以被称作特征层,作为输入图像的特征集合。在CSPDarkNet中,获取到三个特征层作为有效特征层,它们位于CSPDarkNet的不同位置,为下一步的网络建设做准备。
特征金字塔网络可以被称作YOLOX的加强特征提取网络,在CSPDarkNet中获取到的三个有效特征层会在这一部分进行特征融合,以获得不同尺度的特征信息。YOLOX中同样使用了在YOLOv4中用到的路径聚合网络(Path Aggregation Network,PANet)结构[23]。PANet在自上向下的特征金字塔网络(Feature Pyramid Network,FPN)结构中增加了自底向上的路径聚合模块,以更好地传达语义和位置信息。PANet能够缩短信息路径,增强特征金字塔,对于YOLOX网络实现多尺度检测,尤其是对小目标的检测非常重要。
YOLOX的解耦头(Decoupled head)与以往的YOLO不同,它包含一个1×1的卷积层以调整通道数量,然后是两个并行分支,每个分支上包含两个卷积层,两条分支分别用于分类和回归任务,计算重叠度(Intersection over Union,IoU)分支被添加在回归分支上。
3.1.2 损失函数
本研究使用的YOLOX的损失函数由三部分组成,总损失见公式(1),
其中,L为总损失,LReg 为预测框与真实框之间的位置误差的损失,LCls 为判断对象类别概率的损失,LObj 为对象置信度的损失;Cls和Obj分别表示对象的类别概率和置信度,由二值交叉熵损失函数计算得到。公式(2) 为IoU损失函数表达式。
其中,Loss为损失函数(Loss Function);A表示预测边界框的位置;B表示真实边界框的位置。
3.1.3 激活函数
YOLOX使用平滑的SiLU激活函数,它具有下界而无上界,如公式(3) 所示。
3.1.4 无锚框方法
与以往的YOLO网络所使用的Anchor base不同,YOLOX采用Anchor free的策略,避免手动设置锚框和参数定义的步骤。根据无锚方法避免了手动锚设计和参数定义的步骤。无锚方法根据锚定框的中心点是否位于地面真值框的矩形内来确定正样本和负样本,可以有效简化检测器的训练和解码过程,缓解正负样本的不平衡,加快训练过程,并有助于一定程度的精度提高。
3.2 改进的YOLOX网络模型设计
YOLOX主干网络包含多个跨阶段层(Cross Stage Partial,CSP),具有多个残差网络,并且CSP层将输入特征经过少量处理与多个残差的输出特征直接相连,具有较大的残差边。该操作虽然有效缓解了加深网络带来的梯度消失问题,但这种残差会将特征信息连同包含的噪声一起传输到较深的网络,对主干网络提取特征造成一些不利的影响。因此,针对YOLOX在自然环境下火龙果检测的一些缺陷,本研究引入卷积注意力模块(Convolutional Block Attention Module,CBAM),在主干网络提取到的三个有效特征层后分别增加CBAM结构,使网络更加关注重要特征,抑制非必要特征。改进后的YOLOX网络结构如图2 所示。
CBAM是Woo等[24]提出的一种注意力模块。CBAM会将输入的特征层分别进行通道注意力机制和空间注意力机制的处理,使提取到的特征具有更强的表示能力。其结构示意如图3 所示。
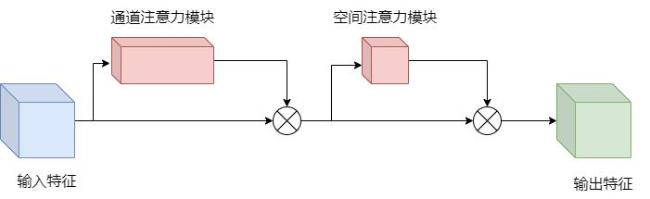
3.2.1 通道注意力机制
通道注意力机制主要关注输入图像中有意义的信息。对输入尺寸为C×H×W的特征层分别进行平均池化和最大池化,获取到两个尺寸为C×1×1的特征层;接着它们经过两个神经网络MLP(Multilayer Perceptron),第一个神经元个数为C/r,激活函数为ReLU,第二个神经元个数为C。其中,C为输入的特征层通道数,r为下降率;将得到的两个结果进行相加,再经过一个Sigmoid函数,得到输入特征层每个通道的权重值;最后将获得的权重值乘以原输入特征层得到新的特征。对于一个输入特征,经过通道注意力机制后得到的特征如公式(4) 所示。
其中, F 表示输入的特征矩阵; F '表示通道注意力机制输出的特征映射; M c为通道压缩权值矩阵; 为矩阵元素依次相乘。
3.2.2 空间注意力机制
空间注意力机制主要关注目标的位置信息。对经过通道注意力机制输出的特征层进行最大池化和平均池化,得到两个尺寸为1×H×W的特征层,将其进行堆叠;再经过一个通道数为1的7×7卷积操作和一个Sigmoid函数得到权重值;最后将权重值乘以输入的特征层得到最终的特征。对于通道注意力机制输出特征 ,经过空间注意力机制后得到的特征 如公式(5) 所示。
其中, 表示空间注意力机制输出的特征矩阵; MS 为空间压缩权值矩阵。
3.3 模型的训练与测试
3.3.1 试验平台
本研究所使用的训练平台为配备Windows10 64-bit操作系统的台式计算机,其中CPU为Intel i9 10900X @3.75GHz,GPU为NVIDIA GeForce GTX3090,RAM为128GB,PyTorch v1.7.1,CUDA v11.1,以及CUDNN v8.0.2。训练环境和测试环境相同。
3.3.2 网络训练
将数据集中5232张图片按照8:1:1随机划分为训练集、验证集和测试集,具体如表1 所示。使用随机梯度下降法(Stochastic Gradient Descent,SGD)和线性缩放(lr×BatchSize/64)的学习率,初始学习率lr=0.001,余弦lr调度。权重衰减设置为0.0005,SGD的动量设置为0.937。使用官方建议的预训练权重进行300轮次(Epoch)训练,其中前50轮次为冻结训练,批大小(BatchSize)设置为64,之后的解冻训练将BatchSize设置为32。最后,考虑到在Mosaic增强的过程中,样本由于偏离实际情况会导致训练效果降低。因此,最后30轮次关闭Mosaic和MixUp数据增强方式。
表1 数据集的分布Table 1 Distribution of the dataset |
| 数据集 | 图片总数量/张 | 目标个数/个 |
|---|---|---|
| 训练集 | 4237 | 11,865 |
| 验证集 | 471 | 1340 |
| 测试集 | 524 | 1396 |
| 总数 | 5232 | 14,601 |
3.4 模型评价指标
使用调和均值F 1值(F1-score)、召回率(Recall)、准确率(Precision)、平均精度(Average Precision,AP)、检测速度(Frames per Second,FPS)、平均检测时间(Average Time)、模型大小(Model Size)来评价训练后的模型。其中,F 1、Precision和Recall计算公式如下。
其中,TP(True Positive,真阳性)指正确分割的正样本数量;FP(False Positive,假阳性)为未正确分割的正样本数量;FN(False Negative,假阴性)为未正确分割的负样本数量,F 为在IoU=0.5的时候,模型的平均精度和召回率的调和平均值。
AP计算如公式(9) 。
其中,r为积分变量,是对召回率与精确度乘积的积分;AP为PR(Precision-Recall)曲线与坐标轴围成的面积,取值在0~1之间;AP0.5 为IoU=0.5时不同查全率下的精度平均值;AP0.5:0.95为将IoU的值从0.5到0.95,步长为0.5,计算这10个不同IoU情况下所有AP的平均值,可以更全面地反映检测模型的性能;APS、APM和APL分别表示为IoU=0.5时,模型对小目标、中目标、大目标检测的平均精度,其中小目标定义为像素面积Area<322,中目标322<Area<962,大目标Area>962。
4 结果与分析
4.1 不同分辨率输入的比较
对不同分辨率(640×640像素和416×416像素)火龙果图像的输入进行训练和比较。训练集和验证集的损失曲线如图4 所示,红色和绿色曲线分别表示相同训练集下高分辨率和低分辨率输入的损失曲线。可见,在训练过程中,两种分辨率输入下模型的收敛性相似,在早期阶段训练集的损失迅速下降,随着训练轮次(Epoch)的增加,两条曲线逐渐下降并趋于稳定。当Epoch达到250左右时,模型逐渐收敛,最终红色曲线的损失值低于绿色曲线。
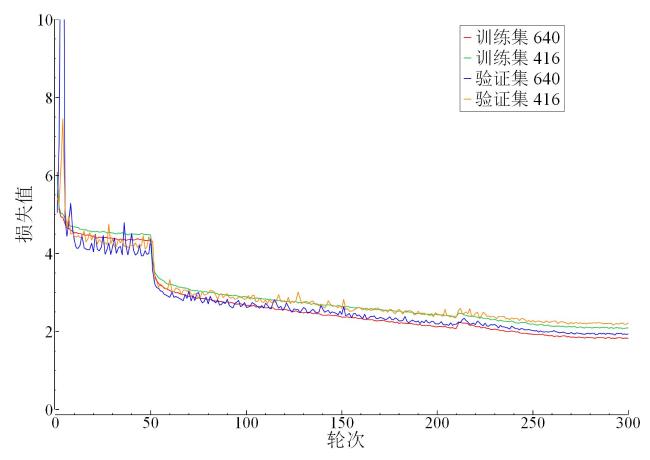
为了分析模型在验证集下的收敛情况,在相同验证集下,蓝色和黄色曲线分别表示高分辨率和低分辨率输入的验证集损失曲线,两条曲线收敛性相似,最终达到平缓状态,蓝色曲线的损失值低于黄色曲线,与训练集下两者损失情况相似。
综上表明,两种不同分辨率输入下的YOLOX-Nano网络都具有较好的收敛性,而高分辨率输入使火龙果特征更加清晰,可以更好地学习特征,该结论与文献类似[25]。因此,本研究使用640×640像素输入分辨率作为最终检测模型。
4.2 不同模型大小的结果分析
使用相同的训练方法,分别训练了三种轻量化的YOLOX网络模型(即YOLOX-Nano、YOLOX-Tiny和YOLOX-S),并在相同测试集下进行测试,分析其性能差异。由表2 可知,三种检测网络F 1值相差不大,在IoU的值为0.5的时候,YOLOX-Nano的平均精度相较YOLOX-Tiny和YOLOX-S分别提高了2.3个百分点和1.6个百分点。而YOLOX-Nano的AP0.5:0.95值达到70.2%,均高于YOLOX-Tiny和YOLOX-S的AP0.5:0.95值3.9个百分点和2.6个百分点。YOLOX-Nano模型大小仅3.7 MB,远小于YOLOX-Tiny的19.4 MB和YOLOX-S的34.3 MB。上述结果中,模型大小最小的YOLOX-Nano性能表现最优,这可能是由于在训练过程中,三种模型保持几乎相同的学习进度和优化参数,训练中对三种模型的增强策略相同(即消除Mosic和MaxUp的时期相同)。而合适的增强策略在不同大小的模型中有所不同,对于大模型,更强的增强更有用,文献[19]中有类似的结论。因此,为了便于在嵌入式和移动设备上部署,在保证有较好的检测精度的前提下,本研究选择模型较小的YOLOX-Nano作为基准进行研究。
表2 不同模型大小的YOLOX-Nano检测结果对比Table 2 Comparison of YOLOX test results of different model sizes |
| 模型 | 大小/MB | F | AP0.5:0.95/% | AP0.5/% |
|---|---|---|---|---|
| YOLOX-Nano | 3.7 | 0.98 | 70.2 | 98.0 |
| YOLOX-Tiny | 19.4 | 0.97 | 66.3 | 95.7 |
| YOLOX-S | 34.3 | 0.97 | 67.6 | 96.4 |
4.3 改进后YOLO网络模型的结果分析
为验证融合了CBAM后的YOLOX-Nano网络模型性能,对改进前后的网络模型进行比较分析。分别将两个模型在相同火龙果数据集上进行识别试验。如图5 所示,改进前的YOLOX-Nano在逆光条件下受太阳光照影响,存在误识别现象,错误地将逆光画面中产生的一定几何外形的光斑识别为火龙果,而改进后的YOLOX-Nano模型则未出现这种情况。在图6 中,两种网络模型均对场景中的火龙果进行正确识别,YOLOX-Nano识别到的目标从左到右置信度分别为0.73、0.79和0.69,而改进后的YOLOX-Nano识别到的相同果实置信度从左到右分别为0.82、0.81和0.74,引入CBAM后的YOLOX-Nano识别到火龙果的置信度高于YOLOX-Nano。两种模型检测火龙果的具体评价指标结果如表3 所示。
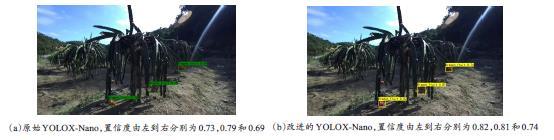
图5 YOLOX-Nano改进前后火龙果检测结果对比Fig. 5 Comparison of test results of YOLOX-Nano before and after improvement |

图6 YOLOX-Nano改进前后火龙果检测结果对比Fig. 6 Test results comparison of YOLOX-Nano before and after the improvement |
表3 改进的YOLOX-Nano网络火龙果检测结果对比Table 3 Comparison of dragon fruit detection results of improved YOLOX-Nano network |
| 改进的网络模型 | 模型大小/MB | 平均时间/ms | F | AP0.5/% | AP0.5:0.95/% | APS/% | APM/% | APL/% |
|---|---|---|---|---|---|---|---|---|
| YOLOX-Nano | 3.70 | 18.46 | 0.98 | 98.0 | 70.2 | 55.4 | 60.8 | 76.2 |
| YOLOX-Nano+CBAM | 3.76 | 21.72 | 0.99 | 98.9 | 72.4 | 56.2 | 63.3 | 78.0 |
由表3 可知,本研究提出的改进后的YOLOX-Nano目标检测网络,在检测时间相差3.26 ms的情况下,F 1值达到0.99,AP0.5值高于YOLOX-Nano目标检测网络0.9个百分点,AP0.5:0.95值提升了2.2个百分点。在添加了CBAM后,模型大小略有增加,但模型对大、中、小不同尺度的火龙果目标检测平均精度分别提升1.8%、2.5%和0.8%。
对比结果说明,在复杂自然背景下,引入CBAM一定程度上提高了模型对火龙果目标检测的鲁棒性。通道注意力机制对特征图中不同通道赋予不同的权重值,空间注意力机制对同一特征图不同位置的特征点赋予不同权重值,二者的结合使得提取到的火龙果特征更加精炼,总体上提升了模型检测的平均精度,其模型体积和检测时间满足嵌入式设备部署需求。
4.4 不同YOLO网络模型的结果分析
为客观地反映改进的YOLOX-Nano网络的性能,本研究还使用相同的设置训练其它轻量化YOLO模型以及标准的YOLOv3模型作为参照,并将它们与C-YOLOX-Nano模型进行比较,五种目标检测网络检测对比结果如表4 所示。
表4 不同网络火龙果检测结果对比Table 4 Comparison of dragon fruit detection results of different networks |
| 网络模型 | 模型大小/MB | 帧率/(f·s-1) | 平均时间/ms | F | AP0.5/% | AP0.5:0.95/% | APS/% | APM/% | APL/% |
|---|---|---|---|---|---|---|---|---|---|
| YOLOX-Nano+CBAM | 3.76 | 46 | 21.72 | 0.99 | 98.9 | 72.4 | 56.2 | 63.3 | 78.0 |
| YOLOv5-S | 27.10 | 59 | 16.87 | 0.93 | 91.0 | 59.5 | 29.0 | 49.8 | 66.5 |
| MobileNetV3-YOLOv4 | 53.70 | 44 | 22.66 | 0.94 | 91.8 | 55.4 | 38.8 | 44.8 | 62.6 |
| YOLOv4-Tiny | 22.40 | 145 | 6.88 | 0.91 | 89.1 | 54.4 | 25.5 | 42.6 | 62.2 |
| YOLOv3 | 235.00 | 51 | 19.38 | 0.83 | 72.7 | 41.4 | 1.7 | 31.0 | 49.7 |
可以看出,在相同测试集下改进后的YOLOX-Nano网络的AP0.5值达到了98.9%,均高于其它模型。此外,该网络的AP0.5:0.95值分别比YOLOv5-S、MobileNetV3-YOLOv4和YOLOv4-Tiny提升了12.9%、17.0%和18.0%。观察APL、APM、APS的值不难看出,在近距离视野范围内的大目标火龙果检测上,改进的YOLOX-Nano网络模型对比其它轻量化YOLO网络模型的平均检测精度提升了约12%左右。随着距离的增加,对中远距离视野范围内火龙果的像素面积逐渐减少,检测精度均有所下降,改进的YOLOX-Nano对中目标火龙果的检测性能对比其它轻量化模型提升了约17%左右。对小目标火龙果检测的平均精度值为56.2%,大约是YOLOv5-S的1.9倍,是MobileNetV3-YOLOv4的1.4倍,是YOLOv4-Tiny的2.1倍。而原始的YOLOv3模型在检测精度上均小于其它模型,对小目标火龙果的APS值仅为1.7%,基本无法对远距离火龙果进行检测。
本研究提出的改进的YOLOX-Nano网络模型在保持模型大小更轻量化的同时,在检测性能上显著优于其它模型,F 1值达到0.99,远高于其它模型。虽然检测速度不是最快的,但改进的YOLOX-Nano仍然具有较高的检测速度,其帧率达到46 f/s,平均检测时间约21.72 ms,可以保证火龙果采摘机器人检测的实时性。
为了验证改进后的YOLOX-Nano在自然环境中的检测效果,本研究将不同模型对顺光、遮阴、逆光等不同自然环境下的火龙果检测效果进行对比。对于图7 和图8 所示的顺光和遮阴条件下,显然可以看出,本研究中改进的YOLOX-Nano网络检测结果均好于其它4种目标检测网络,并未出现误检测情况,甚至对于较远处的小目标火龙果和表面遮挡严重的火龙果也被识别到。对于图9 所示的严重逆光情况下,上述网络均存在漏检的情况,仅有改进的YOLOX-Nano和YOLOV3网络检测出了较近的火龙果,且改进的YOLX-Nano检测到的置信度略高于YOLOv3,而其它3种网络在该自然情况下均未检测出火龙果。
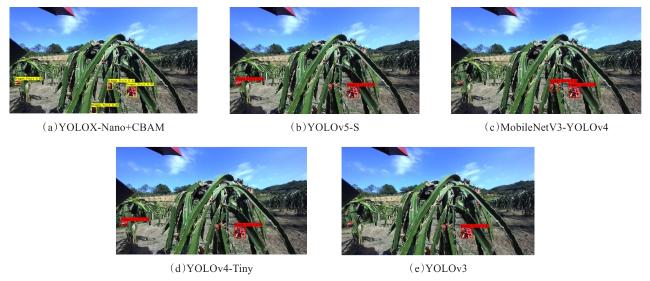
图7 顺光时不同网络火龙果检测效果Fig. 7 Dragon fruit detection effect of different networks during lighting |
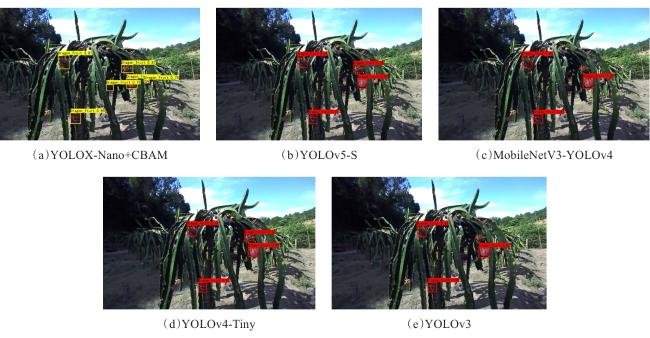
图8 遮阴时不同网络火龙果检测效果Fig. 8 Dragon fruit detection effect of different networks during shading |
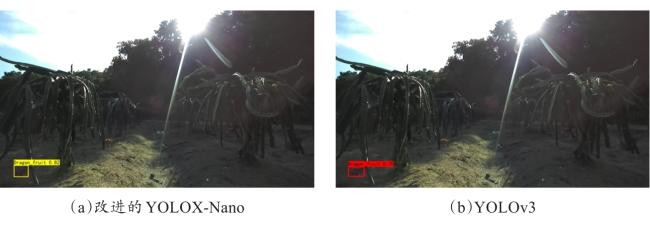
综上所述,本研究提出的方法能够有效地对自然环境中火龙果进行检测。此外,在严重逆光情况下,会影响算法的检测性能,解决此类环境光照对相机影响的问题仍然需要进一步的研究。
4.5 不同视频分辨率输入的结果分析
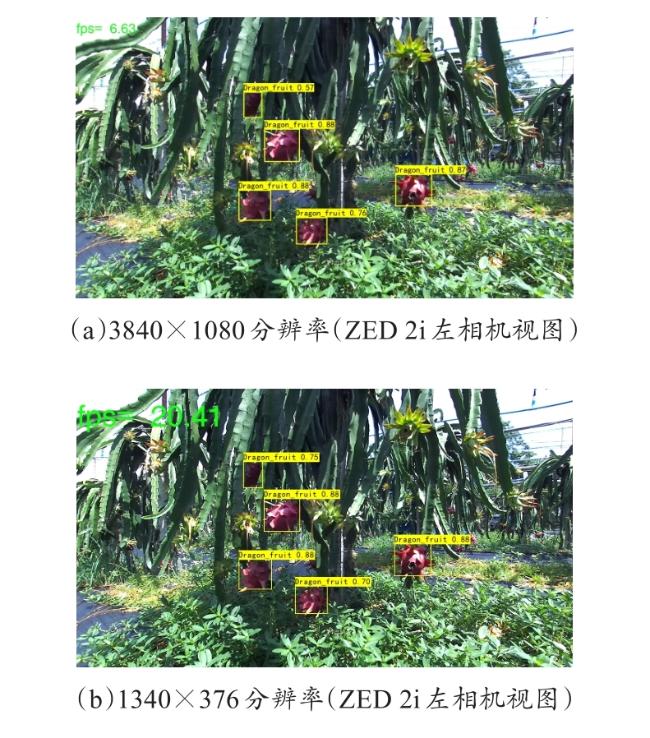
为了验证改进后的YOLOX-Nano目标检测网络是否满足自然环境下实时检测的需求,本研究使用ZED 2i双目相机采集不同分辨率输入下的视频数据进行检测,计算改进后的YOLOX-Nano网络在各分辨率下0~100帧的平均检测帧率,对比结果如表5 所示,其中分辨率为相机采样分辨率,相机帧率为相机采样设置帧率,平均检测帧率为改进后的YOLOX-Nano网络检测帧率的平均值。该模型在4416×1242分辨率下平均检测帧率为5.77 f/s,降低输入分辨率,在1340×376分辨率下平均检测帧率提高到20.94 f/s,随着分辨率输入的降低,模型平均检测帧率提升。图10 为改进后的YOLOX-Nano网络在3840×1080和1340×376分辨率下左相机视角下第50帧的检测效果图,此时检测帧率分别为6.63 f/s和20.41 f/s。综上,改进后的YOLOX-Nano目标检测网络检测帧率满足实时检测需求,可为其他自然环境下水果识别提供一定的参考。
表5 不同分辨率视频火龙果检测结果Table 5 Comparison of dragon fruit detection frame rates in different resolutions |
| 分辨率 | 相机帧率/(f·s-1) | 平均检测帧率/(f·s-1) |
|---|---|---|
| 4416×1242 | 15 | 5.77 |
| 3840×1080 | 30 | 6.89 |
| 2560×720 | 60 | 12.34 |
| 1340×376 | 100 | 20.94 |
5 结 论
本研究介绍了一种基于改进的YOLOX火龙果检测方法。通过引入注意力机制改进YOLOX-Nano目标检测网络。网络经过训练后,在IoU=0.5时检测火龙果的AP值为98.9%。在AP0.5:0.95的值为72.4%,对小目标检测APS为56.2%,此外,改进后的网络模型与其他网络模型检测方法的比较,该模型在不同光照和遮挡条件下准确地检测出火龙果。改进的YOLOX-Nano单幅图像的平均检测时间为21.72 ms,且模型大小为3.76 MB的轻量级模型,适合用于嵌入式设备和移动终端。对不同输入分辨率的视频流进行实时检测,当输入分辨率为1340×376时,平均检测帧率约为21 f/s,满足实时检测需求。综上,本研究提出改进的YOLOX-Nano目标检测模型的实时性和准确性满足在自然环境中火龙果的快速检测要求,对火龙果智能化收获装备的研制具有重要意义,可为其他水果的智能化检测技术研究提供参考。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}