



1 引 言
传统果园生产中需要大量的人力物力,同时也需要经验丰富的果农进行高强度、复杂、繁重的管理作业和决策。根据作者团队针对北京市平谷区西营村果农的调研与访谈显示,果农老龄化情况严重,50岁以上桃农占比超过70%,大部分均为初中以下学历,果园生产面临着劳动人力短缺,生产成本日益增高(人均日工资高达500~600元/(人·天))等问题。
随着物联网、大数据、人工智能、5G等新技术的进步及落地应用,“机器替人”在果园生产中也逐步提上日程。智慧果园是指在生产的全流程中融合多种物联网及电子信息技术来减少果园生产中的人力投入,降低生产成本,同时可以通过精准水肥药管理来实现农药化肥减施增效,减少环境污染。物联网技术是实现智慧果园的基础,基于物联网技术和通信网络将多种传感器接入系统控制平台,通过融合多种传感器获取的数据进行综合决策[1],利用5G等通信技术建立双向通讯链路,向智能机具下发作业任务,智能机具回传作业状态,实现对农药化肥等投入品的精准管控及机械化作业效果监测,实现无人、高效的精准化生产。利用区块链技术结合物联网设备对果园生产全流程进行记录,可实现果品溯源[2]。
2 智慧果园关键技术
典型的智慧果园包含了信息获取部分、历史数据储存及决策部分和执行部分。信息获取部分通过由移动的信息获取机器人、遥感无人机和固定安装于地面的传感器组成的“空天地一体传感器网络”获取作物、土壤、气象等信息,将全生产季的信息储存于后台服务器并通过大数据、人工智能等决策方法来生成决策模型,指导果园的管理作业。数据储存及决策部分汇总了全部的数据,负责全部传感器及智慧机具的网络接入工作,因此往往采用多机冗余等高可用技术来保障系统可靠性。执行部分包含了各种智能作业机具,如植保无人机、智能割草机、智能喷雾机、修剪、施肥、水肥一体系统、采摘机器人等,可通过果园管理平台向作业机具下发作业任务,同时实时回传作业状态参数以实现远程作业状态在线监控。
本研究智慧果园示范园选址于北京市平谷区峪口镇西营村,包括桃园10 hm2(40.1920°N,116.9870°E,约150亩),梨园20 hm2(40.1951°N,116.9835°E,约300亩);种植行距4 m,株距1.5 m,如图1 所示。标准化种植利于机械化作业。平谷智慧果园共应用了10多种病、虫、水、肥、药的传感器与装置,装备了28种机械化智能化技术支持的农机作业装备,如图2 所示。智慧果园中管理系统主要包含智能信息获取子系统、水肥一体化管理子系统、病虫害智能管理子系统、智能作业装备子系统、智能果园管理平台及农产品溯源系统等。示范园的建设集成了多种信息化技术,基本解决了传统果园中管理粗放,机械化程度低等问题,基本实现了生产全程的无人化管理。


2.1 智能信息获取系统
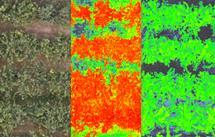
信息获取系统是智慧果园管理作业决策的基础,融合多传感器的数据为智慧果园田间管理提供依据。传统方法仅依据单一数据来源的信息进行计算决策,其准确性和抗干扰能力较差,而智慧果园智能信息获取系统包含空地协同的多元信息感知设备,固定的杆站系统及布设在田间的物联网传感器。通过多传感器信息融合可获取多种植被指数、病虫害信息、温湿度、风速风向、土壤及作物水分等信息来进行综合决策,同时可根据历史数据和人工干预的结果进行更精准的模型来提供决策依据。
示范园中的智能信息获取系统主要包括多光谱无人机、地面杆站系统、地面信息获取系统以及物联网传感器等。
(1) 多光谱无人机

(2) 地面杆站系统

多要素气象传感器(图6 )可以不间断获取气象信息,包含风速、风向、温湿度、气压、降水等,并实时上传到后台存储服务器,融合其他传感器的信息可以为水肥一体化、植保作业等提供依据。

(3) 地面信息获取系统

(4) 物联网传感器


2.2 水肥一体管理系统
基于水肥一体化管路系统(图10 ),智慧果园中水肥管理全部实现了自动化,无需人工介入,可以有效减少人力投入[14],节约氮肥及钾肥的施用。通过连接到物联网的混合器将肥料和水混合到一起,再通过预先架设在树行中的固定管路系统滴灌或喷洒,实现水肥一体化的施用。将智慧果园中水肥管理控制系统接入控制网络,融合多元传感器数据进行水肥施用决策,进而实现水肥自动化精准控制。

结合物联网水势传感器和土壤湿度传感器,大数据平台监测作物出现缺水的趋势,且土壤含水量不足时会控制水肥一体系统开始滴灌,同时会结合气象传感器的历史数据对未来的降雨进行预测,将滴灌和降雨时间错开,充分利用水分,同时滴灌时间避开高温的正午,进一步节约了用水,综合节水量可达70%,水溶性肥料随滴灌带直接滴在植物根部,避免了施在树行中间造成肥料利用率低的问题,全生长季节约氮肥20%~30%,钾肥20%~35%。
2.3 病虫害智能管理系统
中国植物保护工作的总体方针是“预防为主,综合防治”。对于智慧果园,以果树生长状况为核心,融合物理化学生物等多种防治手段,以较低的成本和更小的环境污染来有效控制病虫害的发生。传统果园中虫情观测往往采用人工巡检的方式,对于大面积的果园和山地果园,人工巡检费时费力,同时很依赖于人员的经验。
在智慧果园中,作者团队架设了物联网虫情测报灯、物联网杀虫灯(图11 )、虫情信息采集分析系统(图12 )、孢子自动捕捉系统等设备,可以完成虫情及孢子信息采集,对捕获的害虫和病菌孢子拍照并上传服务器,进行识别及计数,管理人员可以方便得通过后台网页或手机App来远程查看病虫害情况。结合气象传感器、多光谱影像可以对病虫害的发生情况进行预测,提前进行预防性用药。物联网杀虫灯为一种典型的物理防治手段,绿色环保,可捕杀鳞翅目与鞘翅目等害虫[15],同时无化学农药带来的环境污染等问题,配合包含性诱剂的粘虫板可以实现绿色防治。通过物联网杀虫灯的物理防治及虫情测报系统指导下的精准预防性用药,减少了化学农药的过度施用,全生长季减少用药3~5次,平均减少化学农药用量20%~30%。


3 智慧果园智能作业装备系统
3.1 智能作业装备系统概述
智能作业装备系统是智慧果园执行果园管理的基础。智能作业装备系统的典型特征是无人化。随着物联网及无人驾驶技术的发展、5G技术的推广落地以及大带宽低时延的网络接入特性为无人作业机具的远程调控带来了更多的可能。无人驾驶技术不仅降低了生产过程中的人力投入,同时机具更准确的行驶路径也保证了高质量的作业效果。相比于传统农机具,人机分离大大提升了对操作者的安全性,从而在割草碎枝作业中减少人员受伤的可能性,在植保作业中减少操作者中暑中毒的风险。远程巡田系统可以自动化地监测田间病虫害情况,植保作业也利用空地机具协同进行防治,相比传统的喷枪单次作业可以省药30%以上,同时可以只需要一人在田边加药。因此在田间管理阶段平均可减少人力投入50%以上。
本研究构建的智慧果园中的主要智能作业装备有无人驾驶割草机、智能防冻机、开沟施肥机、自动驾驶履带智能仿形变量喷雾机、六旋翼枝向对靶无人机、多功能采摘平台以及整理修剪机等,其主要参数如表1 所示。
表 1 智慧果园中智能作业装备参数Table 1 Parameters of intelligent operation equipment in smart orchard |
| 装备名称 | 性能参数 | 装备名称 | 性能参数 |
|---|---|---|---|
| 无人驾驶割草机 | 行驶速度:3~5 km/h 作业效率:1500~2000 m2/h | 六旋翼枝向对靶无人机 | 药箱容积:30 L 最大作业速度:7 m/s 喷雾工作压力:0~0.5 MPa 喷头数量:8个 喷幅:4~7 m 液泵流量:0~3.6 L/min 作业效率:0.67 hm2/h |
| 智能防冻机 | 加热功率:>5500 W 风机功率:750 W 风机流量:1380 m3/h 出风口风速:23 m/s 有效送风距离:50 m | 多功能采摘平台 | 续航时间:5~8 h 离地间隙:76 mm 电机功率:1500 W 平台最高高度:2150 mm 行驶速度:3~5 km/h |
| 开沟施肥机 | 肥箱容积:0.5 m3 开沟宽度:35 cm 施肥深度:20~40 cm 排肥量:0.5~5 kg/m 配套动力:29~44 kW | 果园整理修剪机 | 顶部切割刀片数量:4 片 立式切割刀片数量:5 片 顶部最大切割高度:4 m 立式最大切割高度:5.4 m 自重:400 kg 最大切割直径:8 cm |
| 自动驾驶履带式智能喷雾机 | 药箱容量:200 L 最大行驶速度:5 km/h 喷雾工作压力:0~4 MPa 喷头数量:10个 液泵流量:13~22 L/min 作业效率:13.33 hm2/h |
3.2 主要智能作业装备系统
(1) 无人驾驶割草机
果园行间生草覆草起到调节地温、改善土壤生态环境等作用,行间生草管理需要定期进行修剪以减少病虫害滋生,同时便于进地作业,无人驾驶割草机可自行完成田间除草作业。中国农业大学无人机系统研究院自主研发的无人自走割草机(图13 )割草速率可达到1500~2000 m2/h,同时具有碎草功能,即割草后直接将草打碎,利于后续开展的机械化作业。割草机采用油电混合动力,作业时发动机可同时为割草和行走提供动力,保证了作业效果和续航时间,相比于纯电动机型有更好的作业连续性,同时油动的割草机构保证了更好的作业效果。

(2) 智能防冻机
果园冻害会极大地影响果园产量,在花期发生的“倒春寒”如持续时间过长,会造成花序冻伤甚至冻死,严重时会造成果园绝产。智慧果园内接入的智能热雾机可以实现果园防冻功能,当气象传感系统检测到温度低于作物耐受阈值时会通过物联网系统远程开启智能热雾机,通过电加热和送风系统促进地表附近空气流通[16],减缓降温(图14 )。

(3) 开沟施肥机
传统果园管理过程中水肥管理需要人工进行大水漫灌和开沟施肥机施底肥和追肥,劳动强度大,需要人力多。大水漫灌一般需要两至三人同时进行;而开沟施肥机需要一人驾驶机具,另一人辅助加肥。开沟施肥机通过机载终端接入物联网,可实时上传机具位置、动力输出装置(Power Take Off,PTO)动力轴转速等作业状态,可通过物联网后台监控评估作业质量、作业面积等信息。开沟施肥可一次完成,重心低矮,操作灵活,可适应不同地形和土质(图15 )。

(4) 自动驾驶履带式智能仿形变量喷雾机

(5) 六旋翼枝向对靶无人机
六旋翼枝向对靶无人机(图17 )可实现果树的飞防作业,利用枝向对靶飞行模式改变机体结构,使风场沿枝条方向穿透进树体,有效地改善了植保无人机施药穿透性不足的问题[18]。通过配套的管理平台可实现一控多机,作业效率进一步提升。机身前后双FPV视频可接入后台管理平台,远程监控飞行状态,保证作业安全和作业质量。

(6) 多功能采摘平台
多功能电动履带式升降作业平台体积小巧,履带式底盘通过性强,具有一机多用、可进入多种复杂地形进行作业等特点。升降平台和左右伸缩的工作位可适应不同行距和种植模式的果园。在疏花疏果、树体管理、采摘运输等作业阶段均可使用(图18 )。

(7) 整理修剪机

4 智慧果园管理平台
智慧果园中所有物联网传感器、智能农机、水肥一体化系统、果品溯源、视频监控等设备均通过5G等通信技术接入了后台存储服务器。管理平台(图20 )通过应用程序接口(Application Programming Interface,API)接口获取数据库中的数据并进行可视化,在管理平台上可查看和移动摄像头,查看传感器历史数据,制定杀虫灯、水肥一体等自动化系统的开关策略,利用历史数据及多传感器信息融合决策,相比人工可以融合更多的数据源,获得更好的控制效果。

信息获取平台可获取林木生长信息,通过大数据可视化平台(图21 )对传感器及监控摄像头的数据进行汇总展示。农机管理平台通过接入大数据平台的传感器数据自动调度作业机具,如病虫害测报系统监测到病虫害发生概率较大,系统会自动调度作业机具进行预防性用药,在病虫害爆发前就控制住,可以有效地减少人工投入。利用农产品溯源平台,可以通过果品包装盒上的二维码,对生产及销售情况进行追溯。消费者扫码后,可查看管理后台记录的果品生产及销售情况。

5 结论与展望
本研究为例的智慧果园通过融合物联网、大数据、农机作业装备智能化等技术来解决劳动力短缺、生产效率低的问题,实现果园农业作业决策数字化、全程机械化、绿色生态化,形成可复制、可推广的智慧果园先导性应用示范经验。经对比发现,智慧果园管理模式的实施为该果园减少人力成本50%以上、农药用量减少30%~40%、肥料用量减少了25%~35%、灌溉用水量减少了60%~70%,实现经济效益提升32.5%。智慧果园的建设大大提高农产品的生产技术水平,一定程度上缓解了劳动力老龄化带来的短缺问题,改善了周围的生态环境,把精准扶贫、精准脱贫与保护生态紧密结合起来,对于建设美丽乡村、美丽中国有着重大的实际意义。
尽管智慧果园建设取得了一定的成效,但离全程机械化、完全智能化、生产过程无人化的现代化目标还有一定的差距,全产业中还存在着许多没有解决的问题,值得政府管理部门、科研院所、装备制造生产厂商、应用推广部门及农场主们深刻思考。
(1)大部分果园、尤其是传统老果园机械化作业条件差。地块比较细碎不连片、非等高种植定植,缺乏智能机械装备下地作业的连续通道,农机机库与地块距离远,转场时间长,导致作业效率低下,尤其是对电驱动智能装备来讲,转场的电能损失过大。
(2)专用果园机械化作业农机与新研发的智能装备及系统创新能力不足。在进行完全自主作业智能装备开发及接入后台管理系统的过程中,实际应用表明当前的技术开发往往采用的是针对现有汽车等行业的自动驾驶及高速作业框架,缺乏针对中国果园专用的低速行驶、负载大、地隙低、爬坡能力强的专用智能装备,以及适合大面积地块作业规划等功能的统一开发框架,目前的装备大多各功能较为独立、不成体系,难以相互通信,未来的专用自主作业果园智能装备需要一个更灵活、完整、系统的软件架构来处理行驶、作业等各功能。
(3)智慧果园系统中缺乏专业传感器(部分专业传感器全靠进口)、且不同厂家的传感器缺乏统一的通信格式,接入时需要针对每种传感器编写驱动,带来了较大的工作量和额外的故障点。部分特殊的传感器目前完全依赖进口,价格昂贵,智慧果园(智慧农业)使用的传感器涉及多学科,政府职能部门应加大力度鼓励企业和高校在传感器研发相关的投入,以实现农业关键传感器的国产化替代。
(4)智慧果园中的各子系统融合不够紧密,作物管理模型较为松散,跨模型融合使用的参数少、几乎没有通用性。为提高果园机械作业精准度,需要建立包含更多参数、普适性更强的作物生长模型来指导作业规划。还需要对智慧果园进行更完整的效益分析,同时更紧密地融合各个系统,以利于智慧果园生产系统实现真正的机械化、智能化,取得更好的社会经济效益。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}