



1 引 言
山地果园地势崎岖并有一定坡度,果园内没有供大型植保机械行驶的道路,移动式喷雾机械难以进入,喷施作业主要依靠果农用背负式喷雾器进行。按照中等高度果树每株树用药5 L、山地果园70株/亩计算,果农用背负式喷雾机(30 L)完成1亩地(约667 m2)的果树喷药需要往返山上山下配药12次。近年来,由于农业劳动力的转移,果园的喷施作业劳动力缺乏现象愈发严重。
相比于风送式喷雾器,在山地果园应用固定式果园管道喷雾具有以下优势:(1)有效增加雾滴沉积量,大大减少雾滴漂移以及地面的药液沉积。针对篱壁式栽种的苹果园,Agnello和Landers[1, 2]设计了一种固定在三层不同高度上的喷雾管道和连接在管道上的微喷式喷嘴,并对高密度苹果种植园进行了喷雾试验,结果表明,从果树的上、中、下层的叶面采集的雾滴沉积量比传统喷气式喷雾机多5 µg/cm2。2013年,该团队[3]再次优化设计了一种钢丝固定式管道喷雾系统。Otto等[4]在意大利坡度为5~10°的葡萄园里建立了一个固定式的喷雾系统,测量了雾滴的垂直分布以及地面沉积,并与低漂移风送式喷雾器进行了对比,结果表明,固定式管道喷雾系统在对植物喷施药液时没有产生药液漂移问题。Sinha等[5]提出了一种应用于山地果园的固定式树冠施药系统(Solid Set Canopy Delivery Systems,SSCDS),与传统的轴流风扇鼓风喷雾器相比,该系统可以显著降低雾滴漂移,且空心圆锥喷头具有更细的液滴以及更好的穿透性。(2)压力稳定更快。Sharda等[6]基于固定式雨棚输药(Solid Set Canopy Delivery,SSCD)系统,选用固体胶管和柔性胶管两种管材在高密度果园/葡萄园中进行施药试验,发现固体胶管的压力建立延迟时间(0.5~8.1 s)比柔性胶管的延迟时间(0.8~11.9 s)更短,压力稳定更快。
2 管道自动喷雾系统设计
2.1 总体设计思路
山地果园中,果树的种植模式为梯田式种植,行与行在不同的等高面上,且果树行的走向由山势的凹凸而定。为实现自动化的喷雾,需为每棵果树配置一个喷雾架,多个喷雾架组成喷雾小组,多个喷雾小组构成喷雾管道系统。
果园管道自动喷雾系统由喷雾首部、喷雾管道、自动喷雾控制器及喷雾小组组成,其结构如图1 所示。
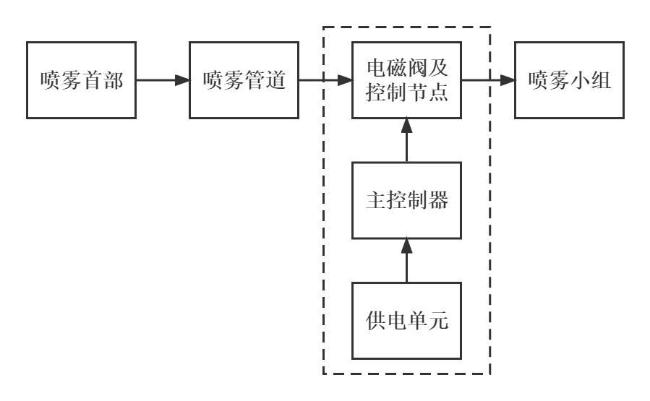
药液经喷雾首部加压并稳压后流入喷雾管道,安装在管道上的电磁阀按照预先设定的程序打开或关闭,控制不同的喷雾小组自动完成喷雾作业。图1 中虚线框内为构成自动喷雾控制器的主要部分。
2.2 喷雾首部设计
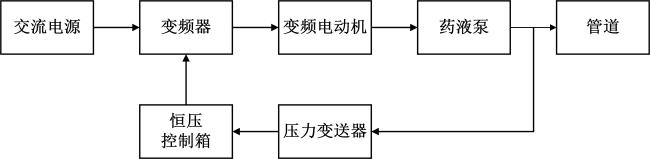
喷雾首部可实现对药液的加压,并根据预设的压力稳定药液的压力,既能保证药液有足够的压力而达到较好的雾化效果,也能保证喷雾管道不至于因压力过大而发生爆裂。喷雾首部由喷雾机组与恒压控制系统组成,如图2 所示。

喷雾机组由变频电动机和药液泵组成[12],根据同时喷雾时的喷头流量总和Q 3选用药液泵的流量Q 2,以Q 2=(1.1~1.3)Q 3为原则选定,并由此确定药液泵的功率P 2。考虑到传动效率,药液泵的功率P 2与配套变频电动机的功率P 1间的关系一般采用P 1=(1.3~1.5)P 2。通电后,药液泵将药液池中的药液吸进药液泵,加压后输进喷雾管道。当变频电动机和药液泵的转速升高时,喷雾管道中药液压力升高;反之,随着变频电动机和药液泵转速的降低,喷雾管道中药液压力也降低。恒压控制系统包括压力变送器、恒压控制装置及变频器[13],压力变送器实时检测管道中药液的压力,并反馈给恒压控制装置,经模糊比例积分微分(Proportion Integration Differentiation,PID)控制算法[11],获得对管道药液压力的控制量;当检测到的管道药液压力大于设定压力时,恒压控制装置输出一个控制量,控制变频器输出电压的频率并使之降低,从而使变频电动机和药液泵的转速降低,最终降低管道中药液压力,直到实时检测压力在设定压力范围内。采用这种闭环控制,解决各种因素引起的管道喷雾系统中药液压力不稳定的问题,提高管道喷雾作业的质量及效率[11]。管道药液恒压控制原理框图如图3 所示。
2.3 喷雾管道设计及压力损失计算
2.3.1 喷雾管道设计
在广东省梅州市某山地柚园(坡度为15~20°)进行的前期试验发现,当机泵房建在山地果园的坡顶时,重力可以弥补部分管道药液压力的损失,而当机泵房建立在坡底时,管道中药液的压力损失显著增加。因此,为减少重力场对管道内药液压力损失的不利影响,对于小面积(不大于2 hm2)的果园,重力和管道长度引起的管道药液压力损失较小,机泵房可以就近设置;对于面积较大的果园,机泵房建立在果园的最高处为佳,当药液由地势高处输送至地势低处时,重力场引起管道中药液压力增加,该部分增加可以抵消因管道长度引起的一部分或全部药液压力损失。
为实现自动化喷雾,主管道与各个喷雾小组之间各安装一个电磁阀。由电磁阀的打开或关闭自动控制各个喷雾小组的自动喷雾作业。在山地果园中,由电磁阀控制的众多喷雾小组,一般按照山地果园地势、作业道路走向、管道压力损失小和喷雾响应时间短的原则,呈“丰”字形布置,如图4 所示[16]。

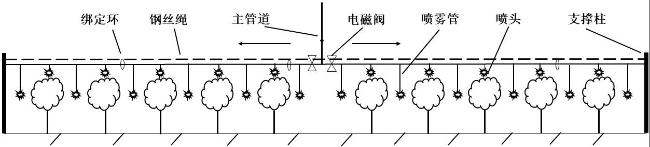
喷雾小组由电磁阀、喷雾架和喷头构成,图5 为示意图。
2.3.2 管道药液压力损失计算
计算管道药液压力损失是为了确定合理的机泵房位置。当机泵房与喷施作业点不在同一高程时,重力场引起的管道药液压力损失计算如公式(1) 所示。
ΔP 1=0.01h
其中,ΔP 1为重力场引起的管道药液压力损失,MPa;h为喷施作业点与机泵房位置间的高度差,m。
除此之外,压力损失还包含管道的沿程压力损失和局部压力损失。沿程压力损失为药液在直管段中流动时,为克服流动过程(沿程)中所遇到的阻力而引起。局部压力损失为药液在管道的弯头、三通、阀门等管件中流动时,因局部改变流动方向流速所引起。在管道喷雾药液压力损失计算中,采用公式(2) 计算药液的沿程压力损失。
其中,ΔP 21为药液的沿程压力损失,MPa;Q为管道中药液流量,m3/h;d 为管道直径,mm;f为沿程水头损失摩阻系数;m为流量指数;b为管径指数。对于山地果园中通常使用的硬塑料管,f = 0.948×105,m=1.77,b=1.47。
喷雾管道中药液的总局部压力损失按公式(3) 计算:
其中,ΔP 22为总局部压力损失,MPa;ξ为局部压力损失系数;v为断面药液平均流速,m/s;g为重力加速度,g = 9.81 m/s2。
ΔP 2=ΔP 21+ΔP 22
为充分利用山地果园的高差来弥补管道药液的沿程和局部压力损失,以果园最高处的施药作业点高程为0计算,则机泵房所处位置的高程H S应按照公式(5) 计算。
其中,H S为机泵房所处位置的高程,m;kα为果园坡度系数,经验取值范围为0.3~0.7,当机泵房位置与果园最高处间的仰角较小时,取较小的kα;其他变量同前。当H S>0时,取H S=0。
2.4 自动喷雾控制器设计
自动喷雾控制器由主控制器、电磁阀驱动电路、电磁阀控制节点和供电单元构成。
2.4.1 主控制器
主控制器如图6 所示,其顶部有电源开关和模式选择按键,模式选择按键对应有“自动”和“手动”2种工作模式;主控制器的底部有电源指示灯和充电接口。主控制器的正面面板有启动按键Q、停止按键T、加按键A和减按键S,面板上的显示数字为当前设定的喷雾时间或当前工作的电磁阀编号。

主控制器的内部电路主要由单片机(ATmega16)、显示模块和无线数字传输模块组成。单片机是主控制器的核心部件,由其I/O口发出打开或关闭电磁阀的控制指令;根据工作模式的不同,显示模块显示当前设定的喷雾时间或当前工作的电磁阀编号;无线数字传输模块完成电磁阀工作状态与单片机之间的通讯。
在“手动”工作模式下,通过加按键A或减按键S,打开对应的电磁阀进行选择性自动喷雾。按下“自动”工作模式键后,喷雾作业由单片机控制自动完成。自动喷雾控制电路接收当前工作电磁阀控制节点的喷雾结束信号后,即发出喷雾控制信号给下一个电磁阀,实现自动顺序喷雾。
2.4.2 电磁阀驱动电路
电磁阀的开启与闭合直接控制喷雾管道中喷头的喷雾状态。电磁阀的打开与关闭由其两个线圈控制,当线圈1得到来自单片机I/O口脉宽0.5~3 s的脉冲后,电磁阀打开并保持打开的状态,控制喷头进行喷雾;当线圈2得到来自单片机I/O口脉宽0.5~3 s的脉冲后,电磁阀关闭并保持关闭的状态[18],喷头停止喷雾。电磁阀的驱动电路原理框图如图7 所示。
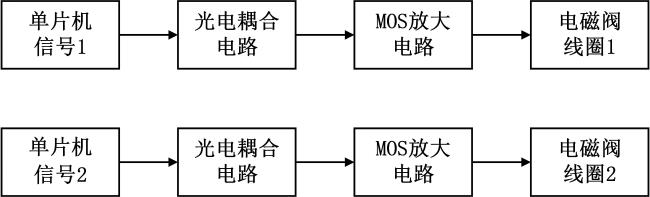
为节省电能消耗,试验中选用了型号为ZCZB-DN15型自保持脉冲电磁阀,其主要技术参数为:供电电压12 V,额定功率20 W,通电时间0.1~3 s,耐压范围0~2.0 Mpa。
2.4.3 电磁阀控制节点
电磁阀控制节点用来发出无线信号给主控制器和接收来自主控制器的无线信号,根据接收的控制信号开启或关闭相应的电磁阀,电磁阀控制其喷雾小组上的多个喷头,根据程序设定完成果园的自动喷雾。完成上述通信的核心部件是无线数字传输模块。
为保证在山地果园中无线控制信号传播的可靠性,本研究选用了深圳市技卓科技有限公司的JZ871数传模块,其主要参数为:发射功率100 mW,接收灵敏度121 dBm,收发转换时间小于10 ms,标称可靠传输距离大于800 m,选择ISM国际公用频段433 MHz。
2.4.4 供电单元
供电单元由太阳能电池板、太阳能控制器和蓄电池组成,为主控制器、无线数据传输模块和电磁阀及其驱动电路供电。太阳能电池板安装在果园中的立柱上,其安装朝向及角度以其接受阳光照射时间最长和光通量最大为最优。
本研究中选用的太阳能供电系统为12 V蓄电池,为满足单片机需要的5 V电源,设计了由降压开关型集成稳压芯片LM2596和外部电路构成的稳压电路。该供电单元在为电磁阀供电的同时,也可以为控制器、数传模块提供电源。
2.4.5 喷雾控制子程序流程
自动喷雾控制器的核心程序是自动喷雾子程序,其流程图如图8 所示。

若选择“手动模式”,通过遥控器即可控制电磁阀的通断。本研究中选择了“自动模式”,电磁阀的通断按照图8 的流程进行:“自动模式”下,程序自动发出控制第一个电磁阀开启的信号,由该电磁阀控制的喷雾小组进行喷雾,同时,系统进行计时,当计时达到预设的持续开通时间Δt时,关闭该电磁阀,并同时打开下一个电磁阀。如此循环下去,根据预定的电磁阀开通顺序,依次打开和关闭,直到最后一个电磁阀关闭,自动的完成整个果园内各个喷雾小组的喷雾作业。
开机启动后,系统即进行程序的初始化,使用者通过软件预设电磁阀持续开通时间Δt,此时间即为发出开启信号与发出关闭信号之间的时间差,然后按下主控器的模式选择键M,进行工作模式的选择。
3 喷雾有效性试验
3.1 试验目的
当电磁阀持续开通时间Δt不同时,喷头持续喷雾的时间不同,雾滴在果树树冠上的沉积也不同。若Δt过小,雾滴在树冠上的沉积量较少,对病虫害防治效果会降低;反之,若Δt过大,雾滴在树冠上的沉积量较多,虽然可以起到有效防治病虫害的效果,但过多的农药雾滴沉积会造成药害和污染果园环境。因此,利用自动喷雾技术和设施时,合适的电磁阀持续开通时间Δt的确定极为重要。
为确定合适的Δt,本研究中使用浓度为250 µg/ml的罗丹明B溶液代替喷雾药液,设定不同的电磁阀持续开通时间Δt进行喷雾试验,获得既能保证喷雾有效又不至于造成药害的电磁阀持续开通时间Δt。
3.2 采样点布置
喷雾试验在华南农业大学工程学院北楼楼顶进行,试验果树为盆栽橘树,高度132 cm,树冠直径146 cm。先将橘树冠层划分成的前、后、左、右4个部分,再沿垂直方向划分上、中、下三个水平层,每个区域内,均匀分布4个采样点,喷雾试验现场如图9 所示[19]。

3.3 试验结果分析
本试验共有4个喷雾小组,每个喷雾小组中有5棵果树。前期预试验发现,1.0 MPa压力下,喷头雾滴穿透与雾化指标已经能满足喷雾的需求,当喷雾压力大于1.0 MPa时,雾滴的穿透力会稍有增强从而提升喷雾的有效性,因此本试验选用了1.0 MPa的压力用以验证喷雾的有效性;即实际田间喷雾时,只要管道压力不小于1.0 MPa,就能满足喷雾有效性的要求。
利用自动喷雾控制程序,电磁阀1~4依次打开和关闭。在设定电磁阀开通的持续时间Δt分别为5、6、7和8 s时,进行了4次喷雾试验。喷雾结束后,收集采样点上的模拟叶片,利用数码显微镜读取模拟叶片上的雾滴个数,以25 滴/cm2雾滴为判断喷雾是否有效的分界线[20];采样点上雾滴沉积不少于25 滴/cm2为有效喷雾,否则为无效喷雾。
定义有效喷雾采样点的个数占总采样点个数的百分比为喷雾有效率。不同喷雾持续时间下的喷雾有效率试验结果如表1 所示。
表1 不同喷雾持续时间下喷雾有效率Table 1 Effective rate of spraying at different spray duration |
| 电磁阀持续开通时间Δt/s | 5 | 6 | 7 | 8 |
|---|---|---|---|---|
| 喷雾有效率/% | 50 | 60 | 90 | 100 |
由试验结果可知,当电磁阀打开持续时间由5 s延长到8 s时,喷雾的有效率在逐渐提高,这是由于随着电磁阀打开持续时间的延长,喷头对树冠的喷雾时间变大,喷头喷出的液体量变大,使雾滴在树冠上的有效沉积变大;当电磁阀打开持续时间为8 s时,采样点上喷雾的有效性达到100%,满足了有效喷雾的要求。当再次延长喷雾时间至9和10 s时,喷雾有效率并无提升,且会有雾滴聚结成水珠滴落,造成不必要的浪费与污染。因此,在自动喷雾控制器的软件设计中,设定电磁阀的开启持续时间为8 s。
需要说明的是,上述结果是在本研究提及的试验条件下获得的,若使用本技术进行自动喷雾,要根据实际所用喷头型号、安装数目和位置的不同以及果树树冠的实际情况,进行实际的田间喷雾试验以确定电磁阀的开启持续时间。
3.4 作业效率分析
按照本试验中每个电磁阀控制5棵树的喷头喷雾持续时间8 s计算,使用管道自动喷雾设施完成一亩地的山地橘园(按照55棵树)喷雾作业的时间t = 8 s ×(55棵/亩/5棵)=88 s/亩(22 min/hm2)。考虑设备启动用时及启动后管道排除空气的耗时(按照10 min计,均摊在连续工作4 h中,则每小时的喷雾工作时间记为57.5 min),由此可以计算出,使用该设施的喷雾作业效率η如公式(6) 所示:
η=57.5×60/88/15=2.61 hm2/h
项目组在实地调研果农时获知,山地果园中使用背负式喷雾器的人工喷雾作业效率一般为0.017~0.025 hm2/h,使用普通管道的人工喷雾作业效率一般为0.05~0.058 hm2/h,使用无人机的喷雾作业效率一般为1.25 hm2/h左右,山地果园管道自动喷雾技术的作业效率为人工喷雾效率的45~150倍,是无人机喷雾作业效率的2.1倍,由此看出,山地果园管道自动喷雾技术在病虫害防治的时效上具有明显的优势。
4 结 论
针对山地果园植保作业中喷雾作业效率低、劳动强度大、移动式喷雾机械难以进入的问题,基于管道喷雾,本研究设计了一种自动喷雾系统,并进行了喷雾有效性试验,主要取得的结论如下。
(1)管道自动喷雾系统由喷雾首部、喷雾管道、自动喷雾控制器及喷雾小组组成。
(2)通过试验发现,电磁阀持续开通时间8 s,即可完成果树的喷雾作业,据此计算出了采用这种管道自动喷雾设施的喷雾作业效率为2.61 hm2/h,与人工喷雾相比,降低了喷雾作业的时间。
可以预见,在农村劳动力逐步减少、难以雇佣人工的形式下,管道自动喷雾技术在中国的山地果园中应用前景广阔。由于管道自动喷雾设施中的基本组件及技术的局限,今后的研究应重点关注:
(1)研发适应于山地果园中基于管道的自动喷雾设施的喷头,具有造价低、耐腐蚀、雾锥角大、雾滴粒径100 μm左右、防滴的特性;
(2)研发基于管道的在线混药装置并形成产品,进一步解决喷雾作业后管道中药液的剩留问题。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}