



1 引 言
饲草作物生长状况的实时监测能为生产者提供必要信息,从而提高田间种植管理水平。无人机遥感在饲草作物生长监测中的应用日益广泛,为系统了解该技术应用现状,分析行业应用进展和面临的问题,本文重点围绕数据获取、数据处理以及饲草作物生长监测关键技术,梳理了无人机遥感在饲草作物监测方面的基本研究方法,总结了饲草作物冠层结构信息提取、光谱重建与优化和饲草生物量估算3项关键技术,分析了近年来相关研究的发展态势,从无人机搭载可见光、多光谱、高光谱、热红外和激光雷达5类传感器的角度总结了国内外无人机遥感饲草作物生长监测的研究进展,最后提出了本领域当前面临的问题与挑战,并针对尚未解决的关键技术问题展望了未来的发展方向。
2 饲草作物无人机遥感监测方法
饲草作物无人机遥感监测是通过无人机搭载各类传感器获取遥感影像,利用图像处理软件提取作物的特征信息,根据光谱特征、纹理特征及作物机理等对作物长势、产量、品质等进行快速、高效、大范围地监测。本节从无人机数据获取、无人机数据处理和饲草作物生长监测关键技术三个方面对饲草作物无人机遥感监测方法进行概述。
2.1 数据获取
无人机获取数据质量的好坏会直接影响正射影像质量,很大程度上决定作物生长监测结果。按照特定的作物生长监测指标选择合适的无人机飞行平台及传感器,根据实际航飞要求合理设置飞行参数是无人机遥感数据获取的基础。
2.1.1 飞行平台
表1 不同类型无人机概况Table 1 Overview of different types of unmanned aerial vehicle (UAV) |
| 无人机类型 | 有效载荷/kg | 续航时间/min | 飞行速 度/(km·h-1) | 飞行高度/m | 常见作业场景 | 优势 | 局限性 |
|---|---|---|---|---|---|---|---|
| 多旋翼 | 小于50 | 10~90 | 36~80 | 约500 | 中小范围的农情监测与农事操作 | 性价比高,起降便利,具备悬停能力 | 续航时间较短、作业范围有限 |
| 固定翼 | 小于40 | 60~360 | 90~170 | 120~6000 | 大范围农情监测与农事操作 | 飞行速度快,续航时间长,作业效率高 | 起降不便,不具备悬停能力 |
| 垂直起降固定翼 | 小于75 | 60~480 | 90~140 | 3000~6000 | 大范围农情监测与农事操作 | 兼顾起降灵活性与作业高效性 | 价格较高,维护复杂 |
|
2.1.2 传感器
传感器是无人机开展遥感监测的核心设备。常用的传感器主要有可见光相机、多光谱相机、高光谱相机、热红外相机和激光雷达等[19]。表2 为各传感器应用于无人机监测的范围、优势和局限性。
表2 不同机载传感器的应用与比较Table 2 Application and comparison of different airborne sensors |
| 传感器 | 应用范围 | 优势 | 局限性 |
|---|---|---|---|
| 可见光相机 | 作物高度、冠层覆盖度、倒伏率、生物量、产量等 | 影像分辨率高,成本低,图像直观,数据处理简单 | 波段数少,影像所含信息较少 |
| 多光谱相机 | 营养元素诊断、冠层覆盖度、病虫害诊断、叶绿素含量、生物量、产量等 | 成本较低,能获取近红外光谱信息 | 波段数有限,影像分辨率较低 |
| 高光谱相机 | 营养元素诊断、作物水分状态、叶绿素含量、叶面积指数、生物量、产量等 | 波段数多,光谱分辨率高,包含光谱信息多 | 数据处理复杂,成本较高 |
| 热红外相机 | 冠层温度、气孔导度、作物水分状态、生物量、产量等 | 能够快速、大范围获取冠层温度信息 | 图像分辨率低,易受外界环境影响,对小幅度温度变化不敏感 |
| 激光雷达 | 作物高度、生物量等 | 能够快速、大范围获取冠层高度信息,分辨率高 | 成本高,数据量大,数据处理复杂,易受水面干扰 |
无人机遥感在饲草作物生长监测应用时,需要根据应用范围、作业成本等因素选择合适的传感器。可见光传感器在饲草作物生长监测应用最广泛,常用的型号包括索尼α 6000[20]、佳能S110[10]等,其主要区别在于传感器视场角度、像幅大小等。多光谱传感器中具有代表性的有MicaSense公司生产的RedEdge系列[21]、Parrot公司生产的Sequoia[22]等,其主要区别是波段数和波长。与可见光和多光谱传感器相比,高光谱、热红外和激光雷达传感器在饲草作物监测中研究应用较少,高光谱中常用型号有推扫式成像的Headwall Nano-Hyperspec[23]和画幅式成像的Cubert FireflEYE 185[24],热红外中常用的型号为OPTRIS公司生产的PI系列传感器[25],激光雷达中应用较多的为GreenValley公司生产的RIEGL VUX-1[26]。
2.1.3 飞行参数
2.2 数据处理
无人机搭载各类传感器能够获取海量的遥感数据,相较于卫星遥感具有更高的空间分辨率,可为作物生长监测提供更全面和准确的数据支持,然而高分辨率的遥感影像也给数据处理带来了挑战,海量数据处理与多源遥感数据配准是低空遥感数据处理技术的关注重点。
2.2.1 数据预处理
可见光、多光谱、高光谱和热红外传感器在数据预处理时涉及辐射校正、影像拼接、几何校正和地理配准几个步骤[35]。其中辐射校正将传感器的像素值转为辐射亮度值,减少太阳角度、云的阴影、相机增益及曝光等因素的影响[2],如MicaSense公司生产的RedEdge多光谱传感器、Cubert公司生产的FireflEYE 185高光谱传感器均可使用厂商配备的辐射校正板进行校正,热红外传感器如大疆公司生产的禅思XT系列可通过辐射校正软件结合气象参数进行校正。此外基于地物实测反射率的经验线性法[36]、伪标准地物辐射纠正法[37]等也是常用的辐射校正方法。影像拼接将一系列重叠度较高的遥感影像借助地理坐标信息进行特征识别和匹配,而几何校正用于纠正由飞行姿态变化引起的成像畸变[38]。影像拼接与几何校正通常采用PhotoScan、Pix4D Mapper等商业软件进行自动化处理[39]。地理配准则使用高精度全球导航卫星系统(Global Navigation Satellite System,GNSS)接收机精确测量地面控制点坐标,在Pix4D Mapper、ArcGIS、QGIS等软件中实现。
2.2.2 生长监测模型构建
目前,无人机遥感技术已广泛用于作物生长监测,如叶面积指数、叶绿素、株高、生物量等指标,其根本依据是作物特征与冠层光谱反射特征的内在联系。常用的模型可以概括为两大类:一是经验统计模型,二是冠层辐射传输模型。
2.3 饲草作物生长监测关键技术
提取并解析饲草作物生长的遥感数据是决定无人机遥感技术能否广泛应用的关键。在饲草作物生长监测的技术方法中,冠层结构信息提取、光谱重建与优化和饲草生物量估算是其中的重点和难点,本节围绕上述3个关键技术展开介绍。
2.3.1 冠层结构信息提取
冠层结构包括株高、冠层体积和叶面积等,反映了作物的生长状态。对于以获取植株为目的饲草作物,冠层不仅是光合作用、蒸腾作用的载体,其变化同时反映了干物质的累积过程[45,46]。如何高效、大面积地提取饲草作物冠层结构特征及其时空变化规律具有重要意义。通过机载激光雷达传感器获取冠层结构信息的方法,已成功应用于柳枝稷[47]和天然草地[40]的表型分析。此外,常用方法还有基于运动推断结构(Structure From Motion,SFM)的作物三维模型重构法,该方法从重叠度较高的遥感影像中提取特征点并进行匹配,随后通过三角量测法生成点云从而得到作物的冠层结构模型。Grüner等[48]研究明确了该方法能实现红车轴草-紫花苜蓿混合草地冠层高度的快速准确提取,Batistoti和Forsmoo等也先后印证了SFM算法在提取大黍[49]、黑麦草-红车轴草混合草地[50]、黑麦草-狼尾草混合草地[12]的冠层结构信息时具有较好效果。
2.3.2 光谱重建与优化
无人机遥感影像数据量庞大,进行数据处理特别是高光谱数据处理时,超大数据量不利于传输、分析和存储,也不利于模型的应用推广。为了兼顾模型精度和光谱的数据量,通常对光谱数据进行重建与优化。相关性分析法能够挖掘遥感数据与关键监测指标的相关性并给出特征选择,目前应用较为广泛。Gao等[13]使用相关系数法筛选出与天然草地营养指标敏感的遥感变量,结果表明地面叶绿素指数(MERIS Terrestrial Chlorophyll Index,MTCI)与粗蛋白含量的相关性最高。Lussem等[11]使用皮尔逊相关系数优选植被指数用于生物量统计建模,发现归一化红绿差异指数(Normalized Green-Red Difference Index,NGRDI)与生物量干重的相关性最高。在高光谱数据处理中,康孝岩等[51]提出了一种基于特征参量化的光谱重建与优化方法,大幅降低高光谱影像数据量,同时具有与原始光谱数据相当的牧草生物量估算精度。Feng等[52]从原始高光谱数据中提取窄带光谱指数,并采用递归特征消除法得到了各光谱指数的特征重要性排名。
2.3.3 饲草生物量估算
生物量是饲草作物的重要监测指标,借助无人机遥感技术对饲草作物生物量进行及时准确地评估能够确保饲草资源的合理利用,也为畜牧管理部门实施牧场建设提供了决策依据。当前已经有众多研究者围绕饲草生物量估算展开研究,苗春丽等[53]结合无人机高光谱遥感数据和地面实测资料,使用机器学习算法建立了高寒天然草地的生物量估测模型。Viljanen等[54]使用无人机搭载可见光相机和高光谱相机,结合作物表面模型和光谱指数构建了梯牧草-草甸羊茅混播草地的生物量模型。在生物量估算的基础上,汪传建等[16]利用GPS轨迹数据获得畜群行为的时空演变模式,将采食强度与天然草地生物量进行融合,得到了天然草地利用情况。通过无人机对饲草生物量进行估算,进而确定合理的载畜量,既对天然草地进行保护,又能使单位面积的生产水平达到最高[55],实现了草地生态系统的可持续发展。
3 无人机遥感饲草作物生长监测研究进展
3.1 无人机遥感饲草作物监测研究态势
为掌握无人机遥感在饲草作物生长监测方面的研究态势,在“Web of Science 核心合集”平台检索已发表的相关学术论文,检索式为:TS=(UAV or UAS or unmanned aerial vehicle) AND TS=(grassland or herbage or forage) AND TS=(height or lodging or biomass or yield or LAI or nitrogen or water stress or evapotranspiration or phenotyping or quality or nutrition or vegetation parameters or feed values or drought tolerance or diseases or pests or chlorophyll),结果如图1 所示。
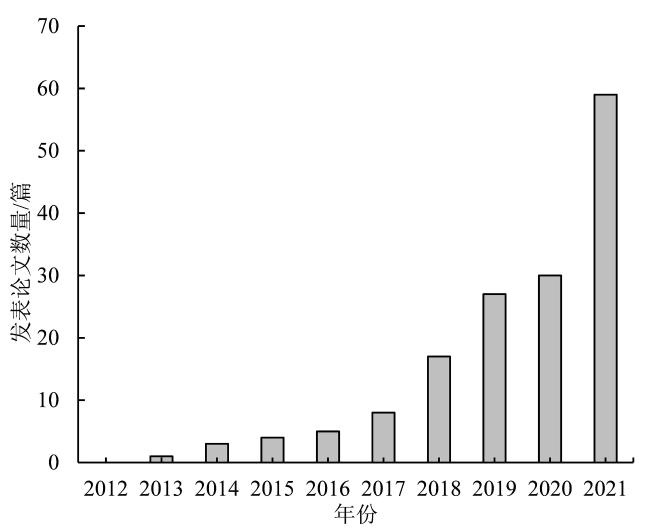
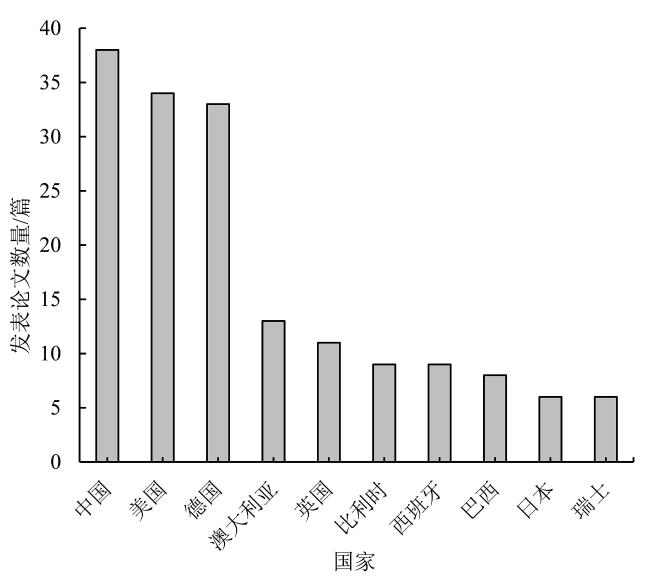
美国牧草生产历史悠久,全国近14%的农田种植牧草,种植面积约为2470万公顷[60],种植的紫花苜蓿和玉米、大豆、小麦进行豆禾轮作,对饲草作物的研究较深入,自2013年起至今共计发表相关论文34篇。其他国家如德国、澳大利亚、英国等也在近年间相继发表了研究论文。通过这些数据表明,全球众多国家已经开展了无人机遥感在饲草作物生长监测中的应用研究,并取得了一定的进展。但根据论文发表数量及发表趋势判断,总体来说,此领域目前并非研究者关注热点领域。
3.2 无人机遥感饲草作物监测研究现状
本节主要围绕近年来无人机遥感监测在饲草作物中的研究应用现状,从可见光、多光谱、高光谱、热红外和激光雷达传感器5个方面进行总结和评述。
3.2.1 可见光遥感
可见光传感器具有成像分辨率高、数据处理简单、成本低等优势,目前在饲草作物的覆盖度、生物量监测中应用最广。在植被覆盖度的研究中,刘艳慧等[61]、赵健赟等[42]证实了过绿指数(Excess Green Index,EXG)在估算饲草作物植被覆盖度的可行性。于惠等[62]采用监督分类结合植被指数直方图分析了6种可见光植被指数对草地的识别效果,结果表明归一化红绿差异指数(Normalized Green-Red Difference Index,NGRDI)提取植被覆盖度的精度最高。伏帅等[63]指出植被因子指数(Vegetative Index,VEG)和EXG估测草地覆盖度的效果较好,平均精确度均在93%以上。
使用敏感植被指数与生物量直接构建线性或非线性模型是饲草作物生物量监测的方法之一。张正健等[34]使用NGRDI构建的亚高山草甸的生物量指数回归模型,以及Shi等[64]使用红绿蓝植被指数(Red Green Blue Vegetation Index,RGBVI)构建的青藏高原地区放牧草地的生物量模型,均取得了较好的结果。近年来众多研究发现数字表面模型(Digital Surface Model,DSM)特征所包含的绝对高度信息能为饲草作物的生物量提供重要参照,可以弥补可见光影像中波段少光谱信息量低的不足,提高模型的预测精度[11,48-50]。除此之外,Castro等[65]基于AlexNet深度学习网络成功预测了不同基因型大黍的生物量,预测值与实际值相关系数r达到0.88。Minch等[66]探究不同飞行高度和拍摄角度对紫花苜蓿生物量建模精度的影响,明确了飞行高度为50 m,拍摄角度为75°时构建的生物量模型精度最高。DiMaggio等[67]对比了30、40、50 m飞行高度下构建的草地生物量模型,模型的决定系数R 2分别为0.65、0.63、0.63,表明飞行高度对结果的影响不显著。
3.2.2 多光谱遥感
在育种表型参数解析方面,Cazenave等[71]使用NDVI指数与覆盖度计算苜蓿干草质量并与实测值进行相关性分析,评估了不同品种苜蓿的生产力。Biswas等[72]分析了NDVI、NDRE、GNDVI和绿红比值植被指数(Green and Red ratio Vegetation Index,GRVI)四种多光谱植被指数与苜蓿生物量的相关性,成功提高了饲草作物育种试验的效率与准确性。在氮素监测研究中,Wang等[9]基于多光谱遥感数据构建了红羊茅草-黑麦草混合草地氮浓度、氮吸收、生物量和氮营养指数(N Nutrition Index,NNI)反演模型。López-Calderón等[33]使用RF算法构建了基于5种多光谱植被指数的青贮玉米含氮量反演模型。大量研究证实了使用多光谱植被指数能够预测饲草作物的产量[15,16,73],在此基础上,Théau等[74]指出使用多光谱指数融合冠层结构信息能够避免光谱指数模型在产量高值区出现饱和,研究者们在黑麦草[22,75,76]、白车轴草-黑麦草混播草地[77]和紫花苜蓿[21]的产量预测模型中加入作物冠层结构信息,均获得了更好的预测效果。
与可见光遥感相比,多光谱遥感获取的近红外波段能够为作物信息反演提供更多的支持,也使数据处理和模型构建具有更大的操作空间,然而当前的研究主要围绕简单的波段组合展开,尚未体现饲草作物在连续波段范围的吸收过程。总体而言,多光谱遥感的综合应用价值较大,是一种较为成熟、适合推广应用的遥感监测手段。
3.2.3 高光谱遥感
高光谱传感器相较于多光谱传感器可以提供更丰富的光谱信息,从而敏感地捕获植被正常或胁迫生长引起的光谱反射率变化[78]。在高光谱的研究中,Näsi等[41]对比了可见光与高光谱影像估算草地生物量、含氮量的效果,证实了高光谱植被指数在草地含氮量的估算中优于可见光。Feng等[52]通过无人机搭载高光谱相机获取苜蓿冠层植被指数,结合RF、SVR和K近邻算法3种机器学习算法,构建了基于集成机器学习算法的苜蓿产量预测模型,结果表明集成模型优于基础学习算法模型,最优模型的R 2为0.87。在产量预测的基础上,Feng等[23]首次将多任务模型(Multi Task Learning,MTL)用于作物营养价值估算,使用基于长短期记忆(Long Short Term Memory,LSTM)和ANN的多任务学习模型估算了苜蓿品质,结果表明多任务模型在估算苜蓿品质方面优于其他模型。Wijesingha等[24]同样研究了不同算法对牧草品质的估算效果,结果表明基于SVR的粗蛋白模型精度最高,而基于Cubist回归的酸性洗涤纤维模型精度最高。
已有研究结果表明,高光谱遥感在饲草作物含氮量、产量和营养价值监测等方面具有较高可行性。目前,基于高光谱遥感发表的研究论文数量要少于可见光、多光谱遥感,在未来研究中,应根据不同作物的特征,充分利用高光谱遥感的光谱分辨率高、信息量大的特点,进一步提升饲草作物的监测效果。
3.2.4 热红外遥感
现阶段热红外传感器图像分辨率普遍较低,研究者们通常将热红外与多光谱、可见光遥感数据融合以提升遥感监测效果。Chandel等[82]使用热红外传感器获得的作物水分胁迫指数(Crop Water Stress Index,CWSI)和多光谱传感器获得的非线性调整指数(Modified Non-Linear Index,MNLI)构建了紫花苜蓿的产量预测模型,其中使用多元线性回归法构建的模型R 2为0.64。Lootens等[17]使用可见光植被指数与冠层温度判断羊茅草、黑麦草的耐旱性,将育种专家给出的视觉评分与无人机遥感数据进行对比分析,结果表明基于逐步回归算法构建的模型能够准确估算牧草的耐旱分数。De Swaef等[18]的研究同样表明植被指数与育种专家给出的视觉评分具有较高的相关性,使用热红外遥感得到的CWSI可用于分析不同品种黑麦草的生理生态差异。
上述研究证实了热红外传感器在饲草作物监测中的可行性,然而传感器本身较低的分辨率和复杂的外界环境为热红外成像技术带来了挑战,在今后的研究中需要关注研发适用性更强的热红外传感器,以达到准确、经济、实用等目的。
3.2.5 激光雷达遥感
4 面临的挑战与展望
4.1 面临的挑战
尽管近年来无人机遥感饲草作物生长监测研究取得了一定进展,但在模型精度、模型普适性、数据处理时效性等方面仍面临较大的挑战,亟待解决的主要问题如下。
(1)现阶段饲草作物生长监测取得的成果大多是基于当次或时间序列接近的遥感影像,未考虑作物不同生育时期冠层形态结构的差异,难以反映全生育期的变化趋势。此外,不同饲草作物、不同地区同种饲草、以及多年生饲草作物年际间的遥感影像存在差异性,目前已构建的饲草作物遥感指标与作物参数之间的模型无法大面积推广应用。
(2)现阶段饲草作物使用的无人机飞行平台多为轻小型无人机搭配可见光、多光谱传感器,多数研究仍限于机载传感器的数据融合,尚未建立无人机与地面、卫星遥感数据的联系,数据获取手段较为单一,限制了生长监测模型的完善和遥感尺度的进一步扩展。
(3)当前无人机遥感数据处理软件分散、系统性较差,遥感影像拼接、预处理、作业处方图生成等需要在不同的软件环境中进行,对操作人员的专业性要求较高。此外,随着饲草作物种植面积的增大与遥感影像分辨率的增加,无人机遥感影像的数据量过大,无法实时传输至地面站,滞后的遥感数据解译限制了饲草作物生长状态的及时反馈。
4.2 展望
针对目前无人机饲草作物生长监测面临的多种挑战,建议未来有关模型构建、数据融合、系统开发的研究从以下几方面展开:
(1)在时间尺度上根据饲草作物不同生育时期和不同生长年的形态特征,逐步实现单生育时期向多时相模型的转变。在空间尺度上围绕具有代表性的研究地区开展饲草作物无人机监测,增加样本数据量,进一步提高模型适用范围。
(2)普及高光谱、热红外和激光雷达传感器在饲草作物监测中的使用,加快多传感器融合技术发展,建立无人机遥感多源数据库,并结合卫星遥感数据、历史产量、土壤电导率等数据开展空天地一体化协同监测。应用光谱成像技术、遥感图像处理技术、深度学习等技术在饲草作物领域继续深入研究,提高生长监测模型的精度和广度。
总之,无人机遥感在饲草作物生长监测方面的研究仍处于起步阶段,与实际生产应用仍存在较大距离。随着计算机信息技术、传感器技术、地理信息系统、通信技术等快速发展,无人机遥感技术及其在饲草作物生长监测应用将进一步走向成熟,并真正服务于农业生产。





{kind=link}
{kind=link}
{kind=link}
{kind=link}