



0 引 言
近年来,植物育种家正在寻找有效的系统来大规模评估植物的详细表型性状,以深入了解基因型与表型之间的关系。植物表型到基因型的映射能够帮助植物育种专家快速精确评估育种质量。草莓作为最具代表性的蔷薇科多年生草本植物,其在全球范围内广泛种植。草莓植株的生长发育状态与其叶龄和植株冠幅密切相关[1, 2]。植物叶龄指的是植物叶片从形成到衰老的整个周期。对于幼苗期植物而言,叶龄往往统计植株展叶的数量。而植株冠幅是指植物在水平和竖直方向上的最大范围或宽度的平均值,通常是指植物的枝条、叶片或花序在水平方向上的展开距离。这两种草莓表型信息的精准高效获取能够帮助相关从业者对草莓生长发育状况做出准确判断,同时也为其他相关领域,如草莓采摘机器人领域、草莓精准化育种管理等提供数据支持[3, 4]。因此,及时准确地提取草莓叶片的数量和植株冠幅等表型信息对于草莓植株栽培工作有着重要意义。
传统植物表型的统计是通过人工检查来完成的。这种劳动密集型方式效率很低且容易受到主观因素影响而产生较大计量误差[3, 5, 6]。因此,利用自动化表型设备和人工智能算法进行植物表型获取并解析受到了各国团队的重视。现阶段常见的设施环境自动化表型数据获取设备有:轨道式表型平台[7]、流水线与成像室表型平台[8]以及移动式表型平台[9, 10]等。移动式表型平台与大型轨道式表型平台相比,其整体设计更为简单轻量,安装部署更为简便;与表型机器人相比,其负载能力和续航能力更强;而与流水线或成像室表型平台相比,移动式表型平台能够实现群体尺度下植株表型的多源数据融合采集工作,通量更高且部署也更为灵活,易于部署在各试验情景中[8, 10]。这类平台上还搭载有多种传感器设备和控制电脑,能够实现多源数据融合采集的工作,因此被广泛应用于植物表型数据获取任务中[11-14]。
基于目标检测方法是利用深度网络对图像进行有监督的特征学习,之后对检测图像中所包含的目标进行识别和框选,以达到检测的目的[18]。常见的模型有基于锚点检测的YOLOv3(You Only Look Once)模型,YOLOv5方法等,也有基于无锚点单阶段方法的CenterNet[19, 20]、YOLOX[21, 22]等方法。基于语义分割的图像处理方法则更多地考虑目标物之间,以及目标物与背景间的差异。模型通过学习这些边缘、纹理、颜色等差异,对不同类别进行掩膜覆盖[23, 24]。这种处理方法能够对目标物实现更精确的识别和定位,但无法对含有多个目标物的复杂图像进行逐一区分。相较而言,基于实例分割的草莓叶片图像数据处理方法具有独特的优势。实例分割技术可以实现植物植株和叶片的自动检测、分割和计数等目标。而这类模型往往精确度很高、效率也高于人工监测,能够降低人力成本,具有非常广阔的应用前景。
Weyler等[9]利用大型跨田垄自走式表型平台实现了对于甜菜幼苗的植株检测和叶片计数,同时模型也对田间常见杂草进行了识别和检测。该团队在平台上装配RGB传感器来实时获取田间图像,获取到的图像利用基于改进CenterNet目标检测模型实现了良好的计数准确率。这种方法通过对锚点及周围信息的感知来达到更好的学习效果,而在一定程上忽视图像中部分边缘信息,难以精准定位植株或叶片的边缘,因此无法实现叶片数量和植株冠幅的同步获取。此外,该团队所使用的无人车设备体积和重量较大,运行功率较高,难以满足狭小温室环境下的高通量数据获取需求。Yan等[19]利用带有机械臂的大体积苹果采摘机器人实现了对苹果目标的检测任务。然而本研究利用草莓数据集和YOLOv5模型进行复现。这一方法仅使用检测手段框选出的草莓植株与真实值的交并比(Intersection over Union, IoU)相对较低,难以满足草莓叶龄和冠幅指标同步提取的精度和效率要求。Oishi等[25]提出了一种针对移动设备新表型平台和马铃薯叶片病害检测模型。该团队创新地利用Faster R-CNN单阶段实例分割的办法对数据进行处理,达到很好的效果,但这一设备和配套方法的推理效率相对较低,难以部署在算力较低的边缘设备中,因此无法满足表型数据本地实时解析的需求[26]。
而Widiyanto等[13]利用Mask R-CNN实例分割模型实现了番茄生长信息的实时获取,并利用提取的ROI(Region of Interest)信息找到番茄目标的感兴趣区域,从而可以用来测量番茄的生长情况。该方法使用Dice系数的准确率为97.34%,使用Jaccard系数的准确率为94.83%。然而本研究指出将番茄果实的体积估算加入到番茄果实生长信息分析的方法里可以提高预测精度,是很有必要的。而利用计算机深度视觉的手段对植物叶片、果实等器官进行实例分割,并获取叶龄冠幅等指标可以帮助实现植物生长信息的高精度推理。
1 实验方法
1.1 数据获取
本研究对实验场所和草莓种植的实际情况进行综合考虑。根据实验需要,本研究使用的底层移动设备是在3WPZ-200A型自走式设备基础上进行改进的。表型平台为跨垄式设计,主体尺寸为 ,轮间距为1 800 mm,底盘高度为1 400 mm(相机镜头距地面1 400 mm)。采用四轮驱动与四轮转向的移动设计,实心轮胎,能够在相对狭小的联栋温室中顺利运行和原地转向换行,整机工作压力为0.2~0.4 MPa(设备在工作时对地面产生的压力),因此能够在较为松软的地面上平稳运行。并且车体采用四轮驱动机器来进一步保证其运动的稳定性:在行走时采用直流无刷电动机,总体额定功率为13.5 kW;而转舵电机为有刷直流的电动机,功率为0.1 kW。在车体内部搭载有FLIR公司生产的BFS-123S6C-C工业相机等设备。该设备经过内置程序配准和畸变校正,能够获取像素为4 096× 3 000的高质量草莓植株RGB图片。电脑还配备有同步采集多源数据的程序,可在设备移动行驶中完成数据的获取任务(图1)。
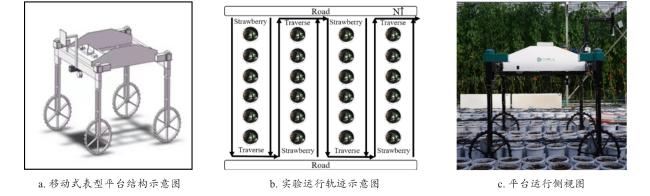
设备选型结束后,进行实验规划和设备部署。本次实验数据采集在2021年11月11日—2021年12月31日于北京市农林科学院联栋温室(39°56′N, 116°16′ E)进行(共40 d)。草莓种植区面积为10 m×40 m,共两个片区,每个区域都安装固定尺寸的地标用于像素标定,草莓采用盆栽的方式种植,正常水肥管理,白色花盆直径为33 cm,高为34 cm。
之后,实验控制移动式表型平台以0.5 m/s的速度沿直线运行。平台在田垄间沿直线行驶,在每行的尽头利用四轮转舵电机的原地转向功能实现横向移动,之后在下一行逆向直线移动采集数据(图1)。此外,为了保证数据获取的全面性,拍摄间隔由采集程序控制为2 s启停一次,使其配合平台移动速度。
1.2 数据标注与预处理
之后,本研究对这些图像进行后续增强操作。本研究采用基于Mosaic数据增强方法对训练集进行自动化扩增,以提高模型的泛化性和准确度。具体而言,Mosaic数据增强会一次性读取4张图片。每一张图片都有其对应的标注点,将4张图片拼接之后就获得一张新的图片,同时也获得这张图片对应的标注信息(图3)。Mosaic增强方式通过对实例的切割,模拟实例被部分遮挡时的情况,能够有效帮助提高训练集的多样性和代表性,从而提高所得模型的精度和泛化性。
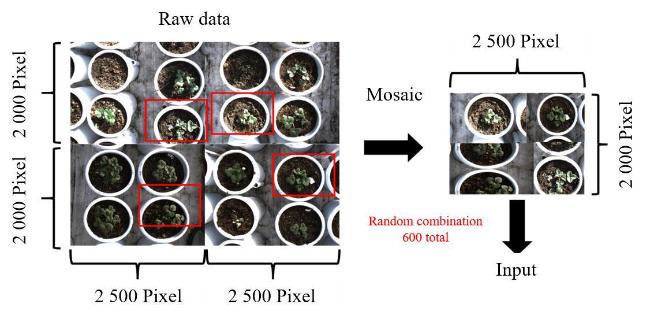
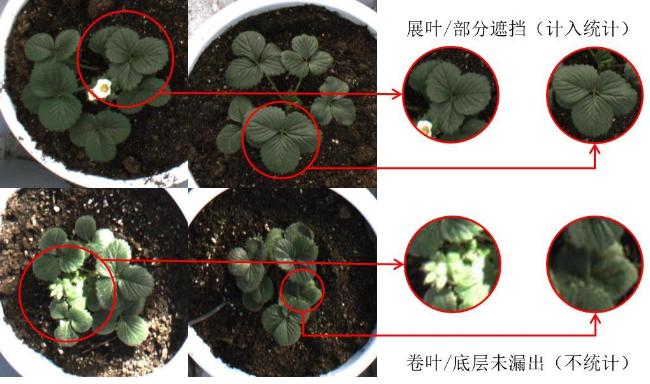
经过上述操作,本实验共挑选出600张图像作为训练的样本(包含300张原始图像和300张强化后图像)。而原始图像中包含植株不同生育时期、不同拍摄光源条件和数据增强程度的图像,其中出苗期图像220张,开花期图像80张,光源充足和光源较暗图像分别为186和114张。而每幅图中包含4~6盆草莓植株,每盆草莓包含约15个叶片(6~27片叶子不等)。本实验选取100张未经增强后的图像作为验证集。这些图像将被用于模型准确度自检。又另选取100张实拍图像用于模型检出结果与人工实测数据对比。这些图像中也包含不同光照条件和生育期的数据,以此验证模型在不同条件下的鲁棒性。
2 网络模型构建
本实验首先利用原始Mask R-CNN模型对草莓数据进行处理,其结果在检测精度和执行效率上难以满足在移动式表型平台的控制电脑(边缘设备)上快速表型提取的需求。根据对预实验结果的分析,本研究认为模型的骨干网络和模型的分类损失函数等存在优化的空间,因而本研究根据前期调研结果对模型进行改进。
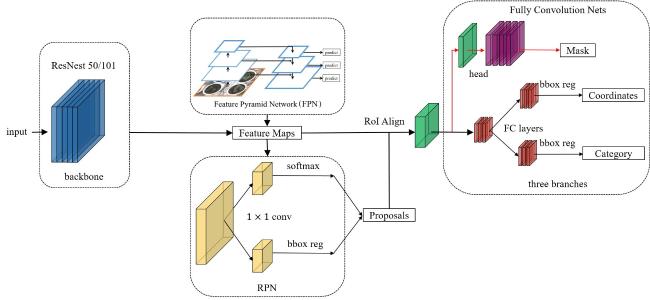
本实验使用的ResNeSt是一种基于残差网络(ResNet)的深度卷积神经网络(Convolutional Neural Network, CNN)模型。它采用一系列的残差块来构建网络结构,每个残差块由卷积层和批量归一化层组成。这种结构与传统的ResNet相比引入分组注意力机制,即将输入特征图分组并学习不同通道之间的注意力权重。这种分组注意力机制提升了特征学习和收敛的丰富性和泛化能力。
此外,ResNeSt采用多尺度特征融合的策略。其通过使用不同大小的卷积核来提取多尺度的特征,并通过卷积层的融合和分裂-注意力机制提高了特征训练精度。之后,本研究将这些特征传入FPN连接层。在FPN中,每个层级从ResNeSt的不同阶段接收输入,形成5个不同尺度的特征图,分别记为[C1, C2, C3, C4, C5],每个特征图捕捉不同大小的物体。通过横向连接和自上而下的路径,FPN结合高层的丰富语义信息和低层的细节信息,从而有效地处理多尺度物体检测和分割。ResNeSt和FPN的结合提升了模型在处理复杂场景和不同尺度物体时的性能,尤其是在复杂草莓叶片语义理解和细粒度特征的应用中。
全局平均池化模块是ResNeSt的最后一层。它对最后一个阶段模块的特征图进行全局平均池化操作,将特征图的每个通道的特征值进行平均,得到一个固定长度的向量。这个向量可以作为网络的输出,经过全连接层或softmax层进行分类或回归。ResNeSt的优势在于其出色的性能和高效的参数利用。通过引入分组注意力机制和多尺度特征融合,ResNeSt能够学习到更丰富的特征表示,特别是能够更好地处理不同尺度下图像的纹理和边缘信息,提升模型的判别能力和泛化能力。同时,它还在保持较高准确性的前提下,降低模型的参数量和计算复杂度,实现更高的参数效率。这使得ResNeSt成为当前计算机视觉领域的研究热点和应用前景广阔的模型之一。
总的来说,在Mask R-CNN模型中使用ResNeSt作为骨干网络,能够提高模型多尺度下实例分割精度,在图像分类、目标检测等计算机视觉任务中展现出卓越的性能和参数效率,它的结构特点和优势使其成为当前研究和应用领域备受关注的模型。
2.1 边缘信息提取
为通过实例分割方法推理每个植株的轮廓,进而求得草莓的南北和东西向冠幅,模型除对每个植株和叶片的颜色、纹理等信息进行把握,还需要对每个实例的边缘信息进行精确学习。而对分割区域边缘信息的精细化提取,能够提高分类精度的同时,提高掩膜的精确度,降低植株冠幅计算的误差。
有鉴于此,本研究采用RoI Align模块替代RoI Pooling模块(图5)。具体地,RoI Align引入一个插值过程,先通过双线性插值法将特征向量转变为14×14像素,再用池化操作将其压缩为7×7的像素大小。这在很大程度上解决了仅通过池化采样带来的无法对齐的问题。其中,双线性插值指的是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向(X和Y)上分别进行一次线性插值计算,如公式(1) 所示。
式中:已知函数f在 , 以及 4个点的值;Q表示函数上的点;x,y分别表示对应点的横纵坐标。
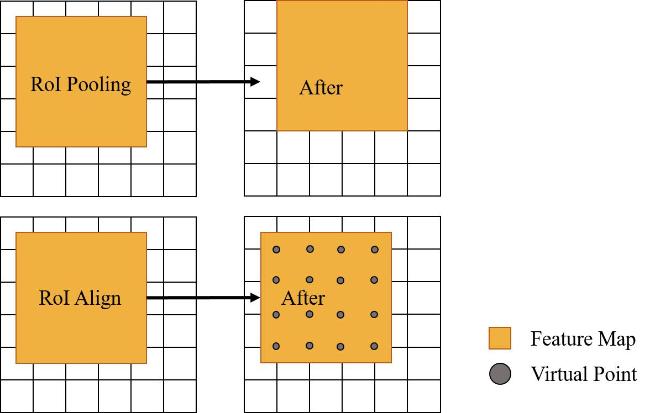
通过上述方法,模型就能够从每个RoI中提取小特征图,即将浮点数RoI量化到特征映射的离散粒度,然后将量化的RoI细分到向量空间中。这些空间本身也被量化,最后将每个空间覆盖的特征值聚合(通常使用最大池化)(图5)。
2.2 损失函数
Mask R-CNN模型选用交叉熵函数作为分类损失函数。这种复杂的多分类损失函数在单分类或二分类任务中存在计算冗余的现象。这不仅降低了预测效率,还在一定程度上限制了模型检测和分类的准确性。因此,为了更好地满足草莓与其叶片的区分统计,本研究选择使用二元交叉熵损失函数(BCELoss)来对原本的交叉熵函数进行优化,如公式(2) 所示。
式中:y为二元标签0或者1; 为y标签的概率; ;N是样本的总数。
使用具有针对性的二元交叉熵函数可以有效地提高二分类准确度,并且缩短模型训练时间。这种改进也使得模型检测叶片计数与人工实测的拟合程度大大提高。改进后Mask R-CNN的优化效果将在后续结果展示中进行详细说明。
2.3 草莓叶龄统计与植株冠幅提取方法
实例分割算法既考虑对象的颜色、形状和纹理等信息,又重点关注实例边缘的信息。在本实验中,对象被分割后的掩膜和对应的检测框是相互影响的。也就是说,实例分割后的检测框会根据分割结果进行动态调整,而掩膜也利用检测框的标定实现同一类别中不同实例的区分标注。鉴于这一特点,模型可以针对检测后的结果进行处理,从而实现草莓植株实例的区分、叶龄(叶片计数)和冠幅的自动提取。
具体来说,实验首先判断叶片与植株的关系,利用实例分割后生成的检测框位置确定叶片的包含关系,如公式(3) 所示。
式中:草莓植株检测框的左上角和右下角坐标分别为 和 ,叶片检测框左上角和右下角坐标分别为 和 。
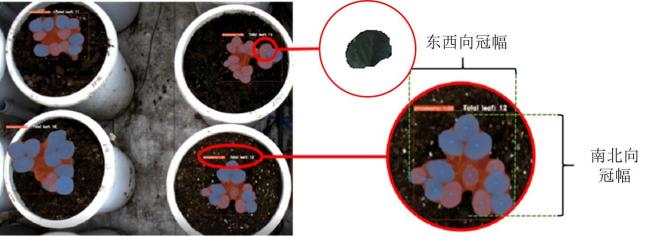
本研究也对实例分割后植株掩膜进行了处理,并以此统计图像中每盆草莓植株的冠幅。植物的冠幅分为不同的方向来测量,以更准确地描述植物的形态特征,其中植物冠层南北方向上的最大伸展长度为南北向冠幅,东西方向上的最大伸展长度成为东西向冠幅。由于试验种植草莓和移动式表型平台获取方向均为正南北方向(图6),因此在模型后处理部分,本研究利用实例分割掩膜的纵向最大值和水平方向最大值作为植株南北向冠幅和东西向冠幅,最终得到冠幅的像素值。之后本研究利用统计结果与标签的比值对冠幅真实值进行计算,如公式(4) 所示。
2.4 模型评价指标及方法准确性检验
本实验利用平均搜索精度(Mean Average Precision, mAP)和图像处理速度对模型训练结果进行评估,mAP的计算如公式(5) 所示。
式中 为评估总数; 为在不同召回率条件下的准确率,如公式(6) 所示。
式中: 为按升序排列的Precision插值段第1个插值处对应的Recall值。
此外,本实验首先利用模型对植株和叶片进行统计,并利用人工实测结果与之进行比较从而验证模型检测分类的准确性。实验还分别计算南北向和东西向草莓植株冠幅的平均误差(Mean Error, ME)和均方根误差(Root Mean Squared Error, RMSE),其计算如公式(7) 所示。
式中 为测试样本总数; 和 分别为冠幅真实值和测量值。测试均使用像素值(最小误差为1像素)作为误差计算单位,用以检验植株冠幅实例分割提取结果的准确性。
3 实验结果
利用改进后Mask R-CNN模型对所获取的数据集进行训练和测试。本实验主要分析该方法实例分割检测的精度、速度和成熟度检测准确率,并与目前最先进的实例分割或目标检测叶龄统计方法进行比较。实验设备如表1所示。之后,为探究不同模块对于实验结果的影响程度,本研究还进行消融实验。
表1 改进Mask R-CNN研究模型训练所用服务器硬件参数Table 1 Hardware parameters of the server used for training the improved Mask R-CNN research model |
| 硬件设备 | 训练设备参数 | 测试设备参数 |
|---|---|---|
| CPU | 12th Gen Intel® Core i7-12700 | 6-core ARM v8.2 64-bit |
| 内存 | 16 GB | 8 GB |
| GPU | NVIDIA 3070ti | NVIDIA Pascal |
| 操作系统 | Windows 11 | Ubuntun 18.0.4 |
| 深度网络及加速架构版本 | Pytorch/CUDA11.8 | Pytorch |
3.1 模型评估
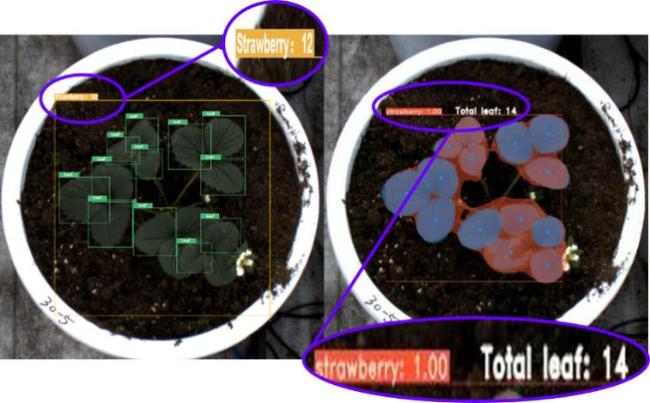
本研究利用实验前准备的100张测试集进行了实验测试(图6)。经过改进Mask R-CNN方法处理后的图像会将计数结果标注在同一株草莓实例框上。
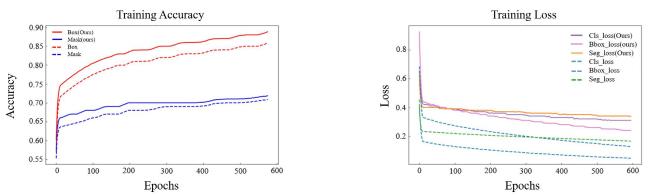
此外,经过计算验证,该方法在ResNet-101骨干网络下,实现80.1%的掩膜准确率(Mask mAP)以及89.6%的检测框准确率(Bbox mAP)(图7)。本实验也分别检验了模型分类损失率、检测框损失率和分割损失率。改进Mask R-CNN模型的分类损失率为2.8%,而在相同条件下,原始方法分类损失率为7.2%。这证明使用BCELoss损失函数能够优化草莓叶龄(叶片数量)统计任务,并且能够对多分类工作起到积极作用。
3.2 消融实验
为了验证ResNeSt骨干网络、Mosaic数据增强和使用二分类交叉熵损失函数对于实验结果的影响,本研究利用控制变量实验进行对比(表2)。当使用改进Mask R-CNN方法时,草莓叶片数(叶龄)检测准确率是最高的。当仅增加数据增强和仅更换损失函数时,最终检测结果也均小优于原始模型。
表2 草莓图像处理研究改进型Mask R-CNN实例分割研究消融实验Table 2 Research on strawberry image processing and improved Mask R-CNN instance segmentation with ablation experiment |
| 骨干网络 | 损失函数 | 检测框准确率/% | 掩膜准确率/% | 叶龄检测准确率/% |
|---|---|---|---|---|
| ResNeSt-101* | BCELoss | 89.6(Best) | 80.1(Best) | 99.3(Best) |
| ResNeSt-50* | BCELoss | 86.2 | 77.0 | 98.0 |
| ResNet-101* | BCELoss | 87.8 | 78.8 | 98.0 |
| ResNet-50* | BCELoss | 84.9 | 75.2 | 96.1 |
| ResNeSt-101 | BCELoss | 82.7 | 77.3 | 96.5 |
| ResNeSt-50 | BCELoss | 81.4 | 76.9 | 95.1 |
| ResNeSt-101* | Cross Entropy Loss | 87.2 | 78.1 | 97.6 |
| ResNeSt-50* | Cross Entropy Loss | 85.0 | 74.7 | 97.2 |
|
通过上述对比也可以得出,在优化骨干网络后,整个模型的检测框准确率和掩膜准确率都有明显提升,而叶龄准确率相较原本的方法也提升1.3%。此外,在其他条件不变的情况下,单独利用Mosaic进行数据增强和仅使用BCELoss作为分类损失函数的方法都能够提升模型训练精度,从而提升草莓叶龄统计精度(表2)。
表3 草莓图像处理研究中改进Mask R-CNN模型与其他实例分割模型集参数量及执行效率对比Table 3 Comparison of parameter quantity and execution efficiency between improved Mask R-CNN model and other instance segmentation model sets in strawberry image processing research |
| 模型类别 | 模型参数量/M | 训练设备上推理速度/FPS | 测试设备的推理速度/FPS |
|---|---|---|---|
| 改进型Mask R-CNN(本研究) | 420.9 | 28.2 | 12.9 |
| Mask R-CNN(原始) | 480.1 | 20.4 | 7.5 |
| YOLOv8 | 640.5 | 19.3 | 6.3 |
| Yolact | 380.7 | 25.4 | 11.4 |
| Yolact++ | 365.5 | 24.9 | 11.0 |
3.3 不同模型结果对比
本研究验证了其他相关模型的精度(表4)。在相同的参数和输入的情况下,Yolact实现76.5%的掩膜准确率以及84.9%的检测框准确率,而Yolact++模型结果分别为77.3%和86.0%,均低于本研究方法。YOLOv8模型虽然在掩膜准确率指标上略高于本研究方法,但在后续验证中,其模型推理速度较低,难以满足在边缘设备快速处理植物表型信息的任务。只针对单一情况而言,当只考虑目标检测时YOLOv5模型在相同条件下,检测框准确率为88.2%,YOLOX检测准确率为90.1%;而只考虑图像的语义分割时,DeepLabv3+的掩膜准确率为78.8%,U-Net的准确率为76.5%。由此可见,本研究所使用的改进型Mask R-CNN模型在完成实例分割(检测+分割)的情况下,模型与单独使用常见的检测或分割模型准确率近似,能够作为自动处理草莓表型提取的手段而被部署。
表4 草莓图像处理研究中不同模型在相同输入和参数下掩膜准确率与检测框准确率对比Table 4 Comparison of Mask accuracy and detection box accuracy of different models in strawberry image processing under the same input and parameters |
| 模型类别 | 掩膜准确率/% | 检测框准确率/% |
|---|---|---|
| 改进Mask R-CNN(本研究) | 80.1 | 89.6 |
| Mask R-CNN(原始) | 76.2 | 86.2 |
| Yolact | 76.5 | 84.9 |
| Yolact++ | 77.3 | 86.0 |
| YOLOv8 | 81.9 | 89.2 |
| YOLOv5 | — | 88.2 |
| YOLOX | — | 90.1 |
| DeepLabv3+ | 78.8 | — |
| U-Net | 76.5 | — |
|
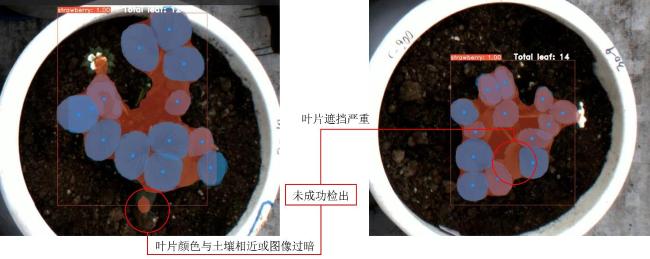
为验证方法与人工实测真实值相比的准确性,本研究将测试结果与人工实测值进行比较。实验所使用的测试图中包含约415个草莓植株和6 136个叶片,其中草莓植株共检出412个,正确率99.3%,草莓叶片共检出6 038个,其中成熟展叶(符合草莓叶龄统计要求)共6 014个(表5),卷叶(不符合)共检出24个,叶龄正确统计率为98.0%。本研究还对同一株草莓所包含的叶片数进行了统计,并且也与人工实测数据进行对比。在415个植株中,利用改进Mask R-CNN模型实现叶片全部检出的植株数为399个,全部检出率为96.1%。其中,未能成功检测出的草莓植株均为严重萎蔫或植株颜色与土壤接近,而未检出的叶片则可能由于遮挡过于严重或叶片过小(图8)。
表5 不同模型检测草莓植株与叶片数准确率Table 5 Accuracy of different models for strawberry plant and leaf numbers |
| 模型类别 | 模型正确检出值/人工计数值 | 正确率/% |
|---|---|---|
| 改进型Mask R-CNN(本研究)* | 412/415 | 99.3(Best) |
| 改进型Mask R-CNN(本研究)※ | 6 014/6 136 | 98.0(Best) |
| Mask R-CNN(原始)* | 405/415 | 97.6 |
| Mask R-CNN(原始)※ | 5 876/6 136 | 95.8 |
| Yolact* | 403/415 | 97.1 |
| Yolact※ | 5 993/6 136 | 97.7 |
| Yolact++* | 410/415 | 98.8 |
| Yolact++※ | 5 899/6 136 | 96.1 |
| YOLOv8* | 412/415 | 99.3(Best) |
| YOLOv8※ | 5 993/6 136 | 97.7 |
| YOLOv5* | 412/415 | 99.3(Best) |
| YOLOv5※ | 6 001/6 136 | 97.8 |
| YOLOX* | 412/415 | 99.3(Best) |
| YOLOX※ | 6 009/6 136 | 97.9 |
|
本研究对比其他实例分割模型叶片数量统计结果与人工实测结果对比情况。这些模型均为相关研究中热门且常见算法[2, 34]。对比结果显示,本研究方法在展叶检测及植株检测任务中具有较高精度(图9)。本实验首先在其他参数不变的情况下对比其他常见实例分割模型和改进型Mask R-CNN(本研究方法)叶龄统计结果的差异(表5)。原始Mask R-CNN模型的草莓植株检出正确率为97.6%,叶片检出率为95.8%;Yolact模型的草莓植株检出正确率为97.1%,叶片检出率为97.7%;Yolact++模型的植株检出正确率为98.8%,叶片检出率为96.1%。结果显示,在叶龄检测精度等方面,这几种方法均低于本研究方法。
本研究还测试了单独利用检测方法所得到的叶龄统计结果(表5),利用YOLOv5方法进行处理的草莓植株检出数量与该方法类似,但叶片计数准确率为97.8%,低于本研究方法。这表明在叶片被遮挡或多个叶片紧密相连的情况下,单独使用目标检测方法是与实例分割方法相比检测准确度更低(图9)。这种差距在叶形差别较大的叶片上尤其明显。而目标检测方法和单独使用语义分割模型则无法完成一幅图片中包含多盆草莓植株时的各项表型提取工作。这也表明本研究方法在同步获取多项草莓表型参数工作中具有先进性。
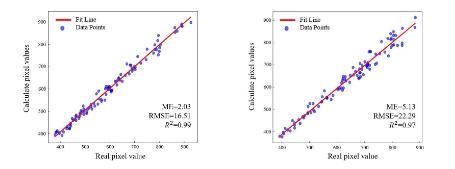
除此之外,本研究对植株南北向和东西向冠幅进行分别统计,并与测试集样本实测数据进行对比。实验结果表明,基于改进型Mask R-CNN预测后所得南北向冠幅平均误差为2.03%,均方根误差为16.51,东西向平均误差为5.13%,均方根误差为22.29(图10)。此外经过统计,在两个方向误差均不超过2%的植株共260个约占总测试样本的62.7%,两个方向误差均不超过5%的植株共407个,约占总测试样本的98.1%。
而本研究也验证了使用常见目标检测方法提取植株冠幅时的统计误差情况。当使用YOLOv5进行统计时,南北向冠幅平均误差为9.57%,均方根误差为87.40,东西向平均误差为12.11%,均方根误差为103.74;而使用YOLOX模型时,上述指标分别为8.33%和66.12以及7.96%和61.24。结果表明,目标检测方法是通过检测框对植株冠幅进行提取,没有利用实例分割掩膜进行收缩调整,因此其框定范围较大,难以满足植株冠幅提取的精度需求(图9)。
综合多种指标精度,本研究对于草莓叶龄的统计以及植株冠幅提取具有较高的准确性,并且在检测过程中,人工检测共计耗时约27 h(共3人进行实测,每人平均统计9 h,每盆大约耗时4 min,包含植株数、叶片数和冠幅像素值统计),自动化处理程序共耗时约15 s(移动式表型平台的边缘设备),因此模型检出速率相较于人工核验有着巨大优势。
4 结 论
本研究利用移动式表型平台和改进型Mask R-CNN实例分割模型实现草莓植株的自动化叶龄与冠幅统计。本研究首先选用可跨垄行驶的移动式表型平台作为表型数据获取和测试平台,并在其上搭载相关传感器和控制设备。在数据处理阶段,在输入阶段首先利用Mosaic数据增强手段对训练样本进行扩增,以提高模型的泛化性。其次,该方法使用ResNeSt结构作为骨干网络,选用FPN作为连接层增加模型在不同尺度下的学习程度,后续使用RoI Align方法提高模型对于实例边缘信息的提取精度和掩膜准确率。最后,使用选择更适合本次任务的二分类交叉熵函数作为分类损失函数。这样在保证检测通量的前提下,大大提高了叶片数量统计的准确性,同时提高了模型训练和推理效率,帮助模型更好地完成移动式表型平台边缘部署和数据解析工作。
结合各项实验结果,本研究方法在草莓叶龄及植株冠幅等表型数据提取任务中有着较高的测试精度,然而该模型仍然需要在具备一定算力的边缘设备运行。这是由于本研究方法虽然提高了整体推理速度,但仍然依赖显卡及深度学习框架进行推理加速。这显然不利于方法的快速部署使用。因此,未来应当重整模型的推理架构,使之在其他设备如CPU上稳定运行,并在执行效率和精度上进行优化,进一步提高植物表型提取的准确率。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}