



0 引 言
玫瑰鲜切花产业近年来持续发展,展现出积极的增长态势。云南、山东和甘肃等地在玫瑰种植上占据重要地位。甘肃省拥有全国26.44%的玫瑰种植企业数量,山东省占据22.47%,云南省占据13.62% [1]。云南作为花卉产业的重要省份,其玫瑰鲜切花产业也发展得相当成熟。云南年产鲜切花已达180亿枝,并出口到40多个国家和地区[2]。在玫瑰鲜切花产业中,分级检测是玫瑰花质量评价的关键环节,对于提高玫瑰花的市场竞争力和种植效益具有重要意义。当前人工分级玫瑰花需要大量的人力,而且人工进行分级容易受到疲劳和主观因素的影响,存在分级效率低、精度不足等问题。近年来,计算机视觉技术在各种智能农业设备中的应用日益普及,利用机器视觉和深度学习技术进行玫瑰鲜切花的自动分级也成为可能。与传统的分级方法相比,基于机器视觉和深度学习的分级方法可以提高分级的准确性和效率,降低成本,且适用于大规模的农业生产[3]。
早在1994年,Stenmetz等[4]参照人工检测分类的标注结果,对玫瑰鲜切花的质量分级进行了研究,该研究对枝条长度和直径测量的相对误差较低,仅为2.2%和16%。Hiary等[5]提出一种基于全卷积神经网络(Fully Convolutional Neural Network, FCN)和VGG(Visual Geometry Group Network)预训练模型的分类方法,在鲜花数据集中的识别准确率达到97%。Mete和Ensari[6]利用深度卷积网络和机器学习算法对鲜花图像进行识别和分类,将卷积网络提取的特征与支持向量机分类器相结合,在102-flower数据集上,可以实现高达96%以上的准确率。赵晓龙[7]在基于神经网络的玫瑰花图像等级分类识别研究中,利用人工神经网络与特征提取相结合的方法,使得玫瑰花的等级分类平均识别率达到94.45%。孙鑫岩[8]基于InceptionV3为主干网络的改进网络中对花蕾开放程度进行分级,取得的最佳分类准确率达到了98%。吴宇[9]基于机器视觉和深度迁移学习对玫瑰鲜切花进行分级研究,最终模型在测试集上的准确率均值达92.81%。
综合来看,虽然利用神经网络和机器视觉算法在鲜切花分级任务中取得了较高的识别率,但是传统模型体积比较大,为了适应移动终端设备,满足实时性和便携性的需求,仍需要进行优化。本研究提出了一种基于改进YOLOv8s[10](You Only Look Once)模型的玫瑰鲜切花分级方法Flower-YOLOv8s,旨在实现分级任务实时性与高精度识别的双重优化。相较于其他分级方法,Flower-YOLOv8s模型可以在不损坏花朵外观的前提下同时检测并分级多个目标花朵,为玫瑰花种植产业的智能化分级提供了切实可行的解决方案,同时也为其他品类鲜切花和其他农产品的分级检测提供新的思路和方法,推动农产品分级的进步。
1 材料与方法
1.1 数据集制作
表1 玫瑰花分级标准GBT—18247.1-2000Table 1 Rose grading standards GBT—18247.1-2000 |
| 等级 | 分级标准 |
|---|---|
| A | 花头大,花色花型正常;无弯头,开放度基本一致, |
| B | 花头大,花色花型正常,有轻微损伤;无弯头,开放度大部分一致, |
| C | 花色、花型有偏差,可能有双心花,花头、花径、叶有轻微损伤;轻微病虫害、弯头、缺陷,开放度大部分一致;部分茎秆弯曲,粗细不均匀,叶面有轻微药斑、病斑 |
| D | 花色、花型有畸形或擦痕,花头、花径、叶片有损伤;大部分为侧枝切花,有病虫害、弯头、缺陷,开放度一般;茎秆多数细短弯曲,叶面有药斑病斑 |
实验数据集构建选用山东省日照市莒县招贤镇所种植的法国红玫瑰花,又名法兰西,于2023年4月12日进行采集拍摄。图像采集设备采用型号为A3A20CG8的大华工业相机进行,配置8 mm镜头,环形光源置于视场上方,整个装置使用高精度可微调支架固定,采用黑色幕布作为拍摄背景,图像采集装置如图1所示。共获得分辨率像素为4 000×3 000的A、B、C、D 4个等级花朵图像324张,从花朵图像中可以获得整枝花的开放程度、花头大小、有无病虫害和有无弯头等数据信息,部分鲜花分级信息如图2所示。利用开源标注工具LabelImg对采集到的玫瑰花朵进行人工标注,并将标注结果保存为PASCAL VOC格式,生成的*.xml格式文件保存至预先设置的文件夹中。接着对玫瑰花图像进行数据增强,对鲜切花进行随机缩放、随机裁剪、随机排布,使用mosaic拼接法,随机截取并混合四张具有不同语义信息的图像,可以丰富数据集,让模型检测超出常规情况下的鲜花目标,还可以达到加强批归一化层(Batch Normalization)的效果,结合所标注的原始样本,最终获得778张花朵图像,具体数据如表2所示。图像数据集被随机分为三组,分别组成模型训练集、验证集和测试集,比例分别为7∶2∶1。这些数据集将用于模型的训练和参数的优化,并与预测结果进行比较,以评估模型性能。

图1 玫瑰花图像采集装置图 Fig. 1 Rose image acquisition device diagram |
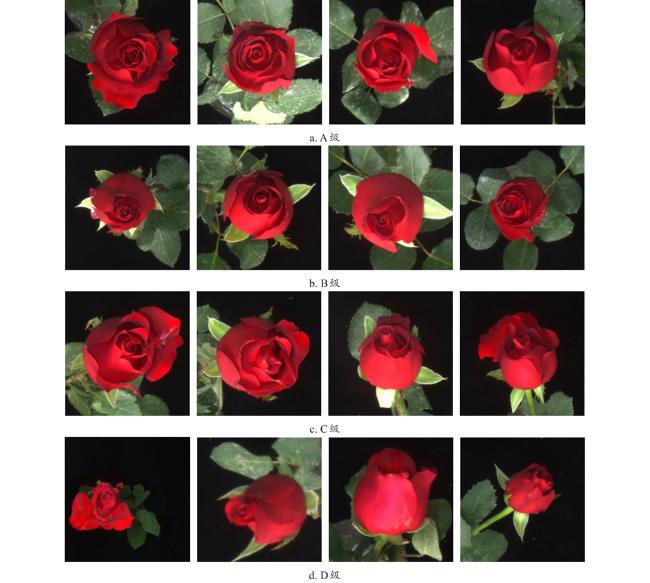
表2 玫瑰鲜切花图像数据增强结果Table 2 Enhancement results of rose fresh cut flower image data |
| 过程 | A级/张 | B级/张 | C级/张 | D级/张 | 合计/张 |
|---|---|---|---|---|---|
| 增强前 | 46 | 95 | 107 | 76 | 324 |
| 增强后 | 114 | 231 | 244 | 189 | 778 |
1.2 实验环境
采用Windows10版本,64位操作系统进行模型训练,CPU为Intel(R) Core(TM) i7 12700 CPU@1.60 GHz,GPU为NVIDIA GeForce GTX 3080,显存为16 GB,深度学习框架为TensorFlow2.7.1,编程语言为Python3.8.0。研究过程中的算法对比均在该硬件环境下进行。
实验训练过程中使用的训练参数如表3所示。
表3 玫瑰鲜切花分级研究训练参数Table 3 Training parameters for grading fresh cut rose flowers |
| 参数 | 数值 |
|---|---|
| 学习率(Learning Rate) | 0.000 1 |
| 图像大小(Image Size)/像素 | 640×640 |
| 梯度动量(Momentum) | 0.937 |
| Batch Size | 16 |
| 迭代轮数(Epochs) | 200 |
| 优化器(Optimizer) | Adam |
1.3 模型原理及评估指标
1.3.1 优化骨干网络
骨干网络是实现特征提取的关键环节。本研究首先针对YOLOv8s的骨干网络进行优化改进。注意力机制近几年来在图像、自然语言处理等领域中都取得了重要的突破,被证明有益于提高模型的性能。SAM(Spatial Attention Module)[12]和CBAM(Convolutional Block Attention Module)[13]都是优秀的注意力机制,它们都可以用于增强卷积神经网络(Convolutional Neural Networks, CNN)的性能。其中SAM是一种空间注意力机制,是对输入特征图不同位置进行加权处理的机制,通过加权处理来强调输入特征图上与任务相关的重要区域。这种机制可以帮助模型更好地关注输入特征图的局部区域,从而更好地完成任务。SAM通常由两部分组成:卷积层和全连接层。卷积层用于提取输入数据的特征,全连接层用于将特征映射到输出空间,并生成加权值。相较于CBAM注意力机制,SAM的计算效率更高,因为它不需要额外的卷积层和全连接层来生成注意力权重。这使得SAM在处理相同大小的输入时,能够更快地生成注意力权重,减少计算时间和资源消耗。
1.3.2 Optimized-SAM模块
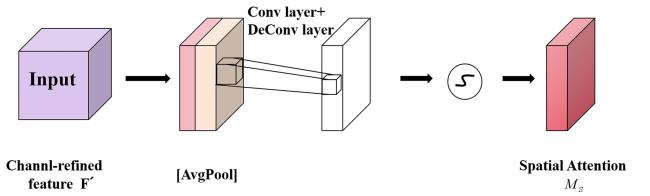
为了进一步提升模型的性能,使SAM注意力机制能够更好地理解图像中的空间关系,增强模型对空间位置信息的注意,本实验对选取的SAM注意力机制模块进行了优化,定义为Optimized Spatial Attention Module(Optimized-SAM),其核心思想是将特征图中的每个像素视为一个独立的通道,通过对这些像素进行加权组合来生成最终的特征表示。这种加权组合是通过一个卷积层和一个反卷积层实现的,其中卷积层用于提取局部特征,反卷积层用于将局部特征映射回原始的空间尺寸。具体优化如下:1)缩小卷积核。采用较小的卷积核3×3,在保持性能的同时显著减少参数数量,从而实现高效的空间注意力机制。2)引入深度可分离卷积(Depthwise Separable Convolution, DWConv)[14]。通过将传统卷积分解为深度卷积和逐点卷积两个步骤,不仅降低了计算复杂度,而且有效减少了参数数量,进而提升了模型的效率和泛化能力。3)缩减输入通道数。在SAM模块中,原本采用平均池化和最大池化作为输入通道,为了降低参数复杂度,仅选择平均池化作为输入,能够简化模型复杂度,降低输入维度,进而减少计算效率,提升模型效率。同时平均池化相对于最大池化更为稳定,能减少噪声和异常值的影响,增强模型的鲁棒性。Optimized-SAM结构如图3所示。
1.3.3 优化C2f模块
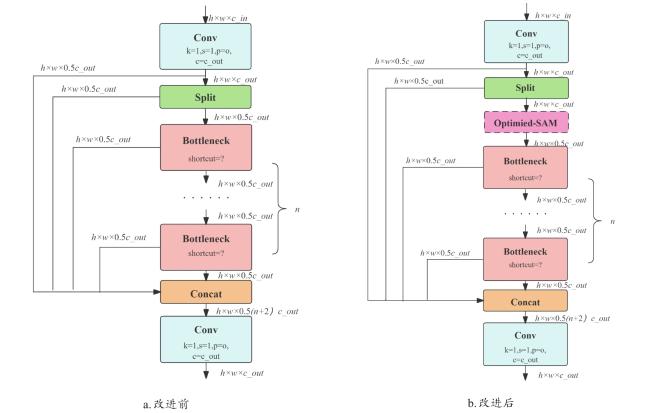
为了减少模型参数数量和目标检测中模型的计算量和内存消耗,同时提高模型的精度和泛化能力,选用DWConv对模型进行进一步优化。DWConv是一种特殊的卷积类型,特点是将卷积核分解成两部分:逐通道卷积(Depthwise Convolution)和逐点卷积(Pointwise Convolution)。在DWConv中,首先对通道(深度)分别进行空间卷积,并对输出进行拼接,随后使用单位卷积核进行通道卷积以得到特征图。相比普通卷积,DWConv通过减少输入通道数量、精简计算模型,有效地减少了卷积层所需的参数,可以在较小的设备上实现高精度的运算。此外,其运行速度比传统卷积更快、计算量更小,更易于实现和部署在不同的平台上。本实验将C2f模块中的卷积层(Conv)替换为了深度可分离卷积(DWConv),然后结合Optimized-SAM一起引入到C2f结构中,从而降低模型参数量和计算量,提升整体模型性能的作用。C2f结构改进前后对比如图4所示,其中图4a为改进前的C2f结构,图4b为改进后的C2f结构。
1.3.4 Flower-YOLOv8s模型构建
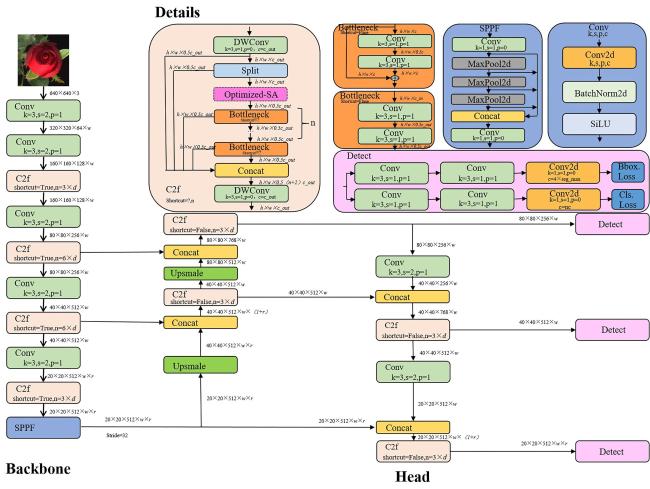
YOLO[15]模型是当前工业、农业领域使用较多的检测网络,其采用one-stage算法,具有网络运行速度快,占内存小等优点。YOLOv8模型是目前YOLO系列的新成果,汲取了前几代网络的优秀特性,整个网络分为Backbone骨干网络部分和Head头部网络[16]部分,遵循CSP(Cross Stage Partial Connection)的思想。骨干网络是模型的基础,负责从输入图像中提取特征,这些特征是后续网络层进行目标检测的基础。在YOLOv8中,骨干网络采用了类似于CSPDarknet的结构。头部网络是目标检测模型的决策部分,负责产生最终的检测结果。骨干网络和Neck部分将YOLOv5[17]中的C3模块替换成了梯度流更稳定的C2f模块,去掉YOLOv5中路径集成特征金字塔结构(Path Aggregation Network-Feature Pyramid Network, PAN-FPN)[18]上采样阶段中的卷积结构,将Backbone不同阶段输出的特征直接送入了上采样操作。YOLOv8模型采用了多尺度特征融合的策略,通过在不同层级的特征图上进行目标检测,可以有效地捕捉不同尺度的目标信息,这使得模型对于小目标和大目标都能有较好的检测效果。YOLOv8提供了YOLOv8n、YOLOv8s、YOLOv8m、YOLOv8l等不同尺度大小的模型,这些模型在精度和速度之间做出了不同的权衡,以适应不同的应用场景。其中,YOLOv8s是该系列中的一个中等规模模型,它在保持较高检测精度的同时,也具备相对较快的检测速度,适用于对实时性和准确性都有一定要求的场景。因此,本研究使用了更适合鲜切花实时检测的YOLOv8s版本,在骨干网络的部分C2f模块中添加Optimized-SAM注意力机制,然后对C2f进行整体优化,获得改进后的模型Flower-YOLOv8s,结构如图5所示。
1.3.5 评估指标
为了评估算法的性能,使用准确率(Precision)、召回率(Recall)和F 1值(F 1-Score)作为评估指标。AP表示单个类别的P-R曲线的面积,F 1值是精确率和召回率的调和平均数,TP表示正类数预测为正类数的个数,FP为负类数预测为正类数的个数,FN为正类数预测为负类数的个数。计算如公式(1)~公式(4) 所示:
2 结果与分析
2.1 消融实验
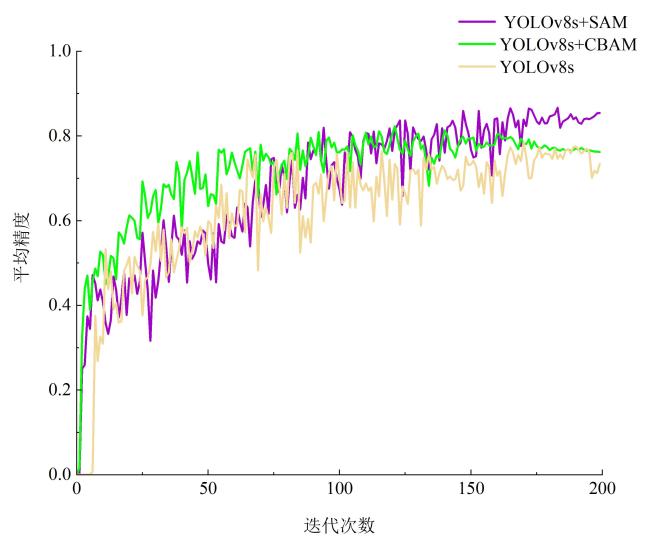
本实验在YOLOv8s模型基础上分别引入SAM注意力机制和CBAM注意力机制进行对比。把标注好的鲜切花花朵数据集分别输入YOLOv8s、YOLOv8s+CBAM和YOLOv8s+SAM三个模型中,在其他训练条件保持一致的情况下,初始学习率为0.001,Epochs设置为200,根据图6结果显示,YOLOv8s+SAM模型平均精度mAP@0.5达到86.4%,优于其他两个模型,效果更好,具有一定的检测优势。因此,添加SAM注意力机制的模型更适合本实验。
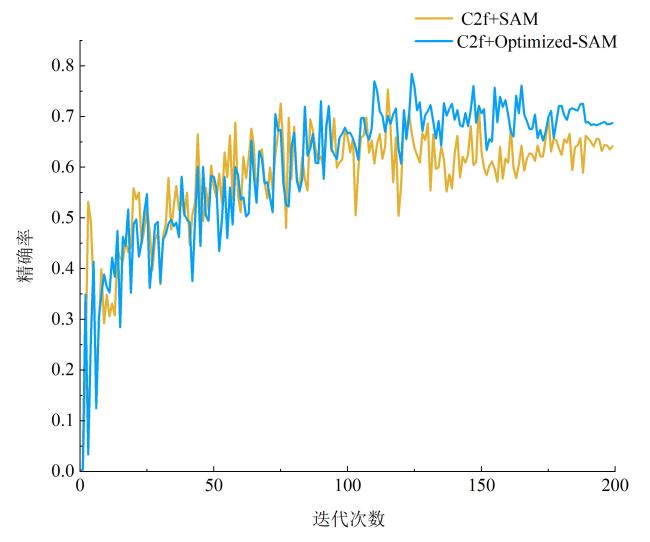
对Optimized-SAM和SAM分别应用到C2f模块中的精确度进行对比,结果如图7所示。在迭代次数和初始学习率相同的情况下,Optimized-SAM的精确率高于SAM,证明Optimized-SAM的性能优于SAM,因此将Optimized-SAM运用到后续实验中。
优化后的模型与基线模型YOLOv8s在精确率、召回率、平均精度均值、参数量、检测时间和模型大小方面的对比如表4。结果显示,本研究所提出的Flower-YOLOv8s模型YOLOv8s+DWConv+Optimized-SAM召回率为95.4%,相较于YOLOv8s单独添加DWConv,提高了3.8%,平均精度均值提升了0.2%,证明了添加Optimized-SAM的有效性。从整体实验结果上来看,改进后的 Flower-YOLOv8s模型在自建数据集上的平均准确率为83.1%,相较于基线模型YOLOv8s提高了0.7%;精确率提升了2.1%,达到97.4%。Flower-YOLOv8s的参数量较基线模型YOLOv8s减少了2.26 M,推理时间上也由15.6 ms减少到5.7 ms。因此,Flower-YOLOv8s模型在精确率、平均精度均值、参数量、检测时间和模型大小方面都优于基线模型,说明改进的DWConv在保证模型精度和泛化能力的同时也大大减少了模型计算量、参数量和推理时间。
表4 优化模型分级玫瑰鲜切花结果对比Table 4 Comparison of optimization model results for rose fresh cut flower grading |
| 模型名称 | 精确率/% | 召回率/% | mAP@0.5/% | 参数量/M | 推理时间/ms | 模型大小/MB |
|---|---|---|---|---|---|---|
| YOLOv8s | 95.3 | 96.5 | 82.4 | 11.13 | 15.6 | 22.5 |
| YOLOv8s+DWConv | 97.2 | 91.6 | 82.9 | 11.13 | 9.2 | 22.6 |
| YOLOv8s+DWConv+Optimized-SAM | 97.4 | 95.4 | 83.1 | 8.87 | 5.7 | 18.0 |
2.2 不同模型的对比实验
表5 不同模型检测玫瑰鲜切花整体性能对比结果Table5 Comparison of overall performances of different models for detecting fresh cut rose flowers |
| 模型名称 | 准确率/% | 召回率/% | mAP@0.5/% | mAP@0.5∶0.95/% | F 1值/% | 参数量/106 | 推理时间/ms | 模型大小/MB |
|---|---|---|---|---|---|---|---|---|
| Fast-RCNN | 86.8 | 81.4 | 80.5 | 76.1 | 0.55 | 193.9 | 36.5 | 102.35 |
| Faster-RCNN | 93.3 | 87.2 | 63.7 | 58.9 | 0.49 | 254.6 | 48.8 | 142.08 |
| SSD | 95.8 | 80.6 | 76.3 | 68.8 | 0.66 | 106.4 | 25.3 | 97.42 |
| YOLOv3 | 93.6 | 76.9 | 81.4 | 71.8 | 0.74 | 207.8 | 22.6 | 103.67 |
| YOLOv5s | 86.1 | 74.4 | 81.2 | 71.0 | 0.75 | 22.2 | 5.9 | 10.92 |
| YOLOv8s | 95.3 | 96.5 | 82.4 | 72.2 | 0.75 | 22.5 | 15.6 | 11.13 |
| Flower-YOLOv8s | 97.4 | 95.4 | 83.1 | 72.5 | 0.77 | 18.0 | 5.7 | 8.87 |
通过分析表5可以得出,本研究所提出的Flower-YOLOv8s模型与Fast-RCNN、Faster-RCNN、SSD、YOLOv3、YOLOv5s和YOLOv8s的平均精度均值分别高2.6%、19.4%、6.5%、1.7%、1.9%和0.7%;相比于召回率更高的YOLOv8s,Flower-YOLOv8s的模型大小、推理时间和参数量分别减少4.5 MB、9.9 ms和2.26 M。所以,本研究提出的Flower-YOLOv8s在玫瑰鲜切花分级检测上体现出一定程度的优越性,可以提高分级检测的效率,更满足鲜切花分级设备的需求。
2.3 复杂背景下鲜切花实例检测
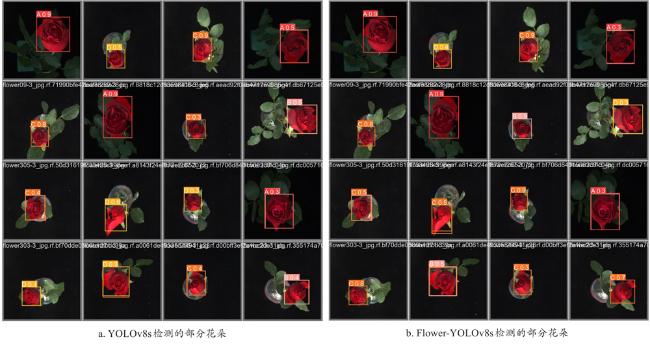
为进一步验证改进模型Flower-YOLOv8s在复杂背景下的实际分级检测性能,使用YOLOv8s和Flower-YOLOv8s分别对相同的16朵玫瑰鲜切花进行目标检测,这些图像存在亮度不足、背景和检测对象区分度不明显、因拍摄时长问题花朵间新鲜度不一致等情况。检测结果如图8所示。从实例检测图可以看出,YOLOv8s出现误检现象,其中6朵玫瑰鲜切花被错误地识别为其他类别,而Flower-YOLOv8s检测时,仅有1朵鲜花被错误检测。说明本研究提出的Flower-YOLOv8s在复杂背景下,检测准确率更高,这进一步验证了Flower-YOLOv8s在提升检测性能方面的有效性。
3 讨 论
据统计,鲜切花采后加工损失可达31.88%,其中分级损失占21.74%[25],凸显了加工效率对鲜切花品质控制的重要性。鉴于鲜切花易腐、易损的特性,本研究提出了一种基于改进YOLOv8s模型的玫瑰鲜切花分级方法,通过引入SAM注意力机制和对C2f模块进行优化,提升了模型的检测速度和精度,大大降低了模型参数量,实现了检测的实时性与高精度识别的双重优化,极大地提高了分级工作的效率和准确性。这有助于确保鲜切花符合市场标准,提升产品竞争力。
但本研究仍有不足,在以下方面需要进一步的完善与探索。
1)Flower-YOLOv8s在具体应用中还需要根据鲜切花的特点进行针对性地优化和调试,以达到最佳的分级效果。
2)由于目标检测算法对于数据质量和数量要求较高,加上在实际生产环境中,鲜切花的状态可能会受到多种因素的影响,如光照、角度、遮挡等。因此如何进一步提高模型的鲁棒性和泛化能力是未来研究的重要方向,以便能够应对各种复杂情况。
3)仅对玫瑰花朵进行分级检测来评判整枝花的等级还存在一定的片面性,在后续实验中还要加入到对花茎花杆的检测分级,最终两者结合得出整枝花的等级。
4)还可以针对不同品种、不同生长环境的玫瑰花展开深入研究,完善和拓展玫瑰花分级检测的方法和技术体系。
4 结 论
本研究针对玫瑰鲜切花进行品质分级,提出了一种基于Flower-YOLOv8s的玫瑰鲜切花分级检测模型,主要研究结论如下。
1)对YOLOv8s模型进行改进,添加SAM注意力机制进行特征提取,有效提升了模型在鲜切花分级检测任务中的精确度。同时,对C2f模块进行了优化,将卷积层(Conv)替换为深度可分离卷积(DWConv),并与优化的SAM一同嵌入到C2f结构中,大大减少了模型的参数数量和计算负载,从而提升了检测速度,达到5.7 ms。
2)实验结果表明,改进后的Flower-YOLOv8s模型在自建数据集上的平均准确率为83.1%,相较于基线模型YOLOv8s精确率提升了2.1%。此外,模型大小、推理时间和参数量相较YOLOv8s分别减少4.5 MB、9.9 ms和2.26 M。充分验证了模型改进的优越性,为玫瑰鲜切花分级检测提供了一种高效、准确的方法,并为其他农产品分级检测研究提供了参考。在复杂背景下的检测也取得了较好的准确度,进一步验证了Flower-YOLOv8s在提升检测性能方面的有效性。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}