



0 引 言
农业装备的机械化、自动化和智能化是提高作业效率、解放劳动力、推动农业可持续发展的关键,对保障国家粮食安全、促进农业增收增效起着至关重要的作用。中国是一个幅员辽阔的农业大国,且丘陵山地占比较高,约占国土面积的70%[1]。据《第三次全国国土调查主要数据公报》[2]显示,中国耕地面积为1.3×106 km2,位列世界第三。其中位于2°及以下坡度的耕地面积为7.9×105 km2,占全国耕地的61.93%;位于2°~6°坡度(含6°)的耕地面积为2.0×105 km2,占15.32%;位于6°~15°坡度(含15°)的耕地面积为1.7×105 km2,占13.40%;位于15°~25°坡度(含25°)的耕地面积为7.7×104 km2,占6.04%;位于25°以上坡度的耕地面积为4.2×104 km2,占3.31%。2°及以下的平耕地与2°~6°的缓坡地耕作难度小,普通的拖拉机即可完成平稳高效作业;6°~15°的丘陵地需要依靠具有调平功能或大幅宽低重心的山地拖拉机来保证作业的安全性及作业质量;而在15°~25°的坡地工作时,拖拉机易倾翻,采用无人拖拉机来代替人工驾驶,可极大保证驾驶人员的安全性;25°以上的陡坡地禁止种植农作物,采取水土保持措施。可见,中国将近四分之一的大坡度丘陵山地亟需专用可靠的山地拖拉机辅助耕作。
截至2022年,中国农机装备总量近2亿台(套),农作物耕种收综合机械化率超72%,但丘陵山区农作物耕种收综合机械化率低于50%。中国丘陵山区地域广阔,存在地形复杂、地块碎小、坡陡路窄等问题。这些区域农业发展较为落后,农业生产存在“无机可用,无好机用”的现实问题[3]。现阶段国内丘陵山地作业机械主要以微型或小型微耕机和田间管理机械为主,但这些机械都普遍存在易倾翻、操作难度较大、人员安全难以保障等问题,并且这些因素都严重影响了作业质量,对丘陵山区农业的机械化和现代化发展起到了较大阻碍作用。农业农村部印发的《“十四五”全国农业机械化发展规划》中明确指出“要积极发展丘陵山区农业生产高效专用农机,加快补齐丘陵山区农业机械化短板”。因此,亟需加快丘陵山区农机装备的研发和推广应用。
世界上丘陵山地较多的国家还有瑞典、瑞士、日本、西班牙、芬兰、伊朗等。丘陵山地工作环境复杂且危险程度大,易发生安全事故。在全球范围内,拖拉机翻车事故死亡人数占拖拉机事故死亡的一半以上。丘陵山地拖拉机的驾驶安全性问题已成为国内外学者研究的热点问题。
针对上述丘陵山地作业面临的地形复杂、坡陡路窄的问题,现有的解决方案一是采用调平技术,二是增加防侧翻技术。拖拉机调平系统可以在不平作业环境下达到车身与悬挂机具协调控制的效果,提高了驾驶人员的舒适性、安全性和拖拉机作业的可靠性。拖拉机防翻系统确保了拖拉机和驾驶人员的安全性。本文综述了国内外山地拖拉机机身及其悬挂农机具的姿态调平技术与山地拖拉机防翻装置和系统的研究现状及其作业性能的研究进展,结合中国丘陵山区的实际地形地貌特点,研讨现有坡地作业机械、坡地作业机理、耕作模式及防翻机构与策略存在的问题,旨在提出拖拉机车身及悬挂机具调平坡地自适应策略与陡坡地拖拉机防翻技术等解决方案,以期为进一步研发适宜的山地拖拉机和配套机具以及拖拉机防翻系统与策略提供技术基础。
1 山地拖拉机调平技术研究现状
1.1 车身调平机构
丘陵山区农田作业的复杂环境特性导致当前具有主动调平系统的山地拖拉机研制与产业应用面临以下挑战:一是丘陵山区地形地貌各异,作业工况受土壤类型(砂土、黏土、壤土等)、土壤参数(含水率、坚实度等)、地面起伏幅度(落差、频率)、地块碎小零散、机耕道弯窄等影响,要求拖拉机具有转向灵活、结构稳定、易操控和行驶稳定性好等特性;二是在特定环境下,如果园中,受果树枝条生长形态的影响,动力机械不宜过高过大,否则会导致机器无法顺利通行;三是作业环节包括耕、种、管、收、运等诸多作业环节,动力机械要匹配并满足各个环节的作业需求。当拖拉机处于崎岖的坡地环境下作业时,车身的姿态不仅影响驾驶人员的驾驶感受,还会增加拖拉机横向的侧滑和侧翻风险。安装车身调平系统的拖拉机在遇到凹凸不平或倾斜路况时可根据位姿情况主动调整车身姿态,使车身姿态始终保持水平状态或将整车重心调节在稳定区间之内,能提高驾驶员的操作安全性、驾驶舒适性及拖拉机在横向坡地的抗侧滑、抗倾翻能力[4, 5]。
目前,山地拖拉机车身调平控制系统的调平机构根据工作方式的不同可分为液压差高式、平行四杆式、重心可调式、折腰扭腰式和全向调平机构。
1.1.1 液压差高式调平机构

1.1.2 平行四杆式调平机构
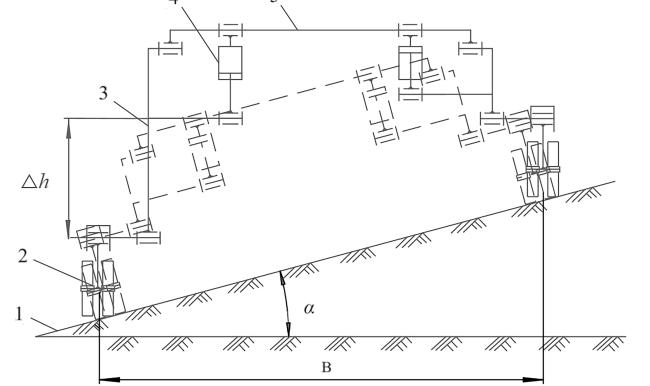
平行四杆式调平机构由台车架、从连杆、下层车架和主连杆组成。横向调平油缸向主连杆提供动力,推动主连杆摆动,通过拉杆带动从连杆摆动以此改变平行四边形形状,使得车辆在坡地行驶时两侧行走机构产生高度差,实现车身调平的效果,提高了仿形过程的平稳性,完成车身单侧的姿态调整,推杆伸缩量控制由角度传感器提供反馈信号。车身两侧横向调平油缸同时工作可实现整机离地间隙的调整,提高通过性。平行四杆机构具有结构简单、运动平稳、承载能力强、安装调整方便以及仿形效果较好等特点。平行四杆式调平机构结构简图如图3所示。
高墨尧[12]通过对差高结构设计计算得出底盘倾斜角度与调节驱动油缸行程的关系,并对整机液压调平系统及工作原理进行全面系统的分析,由此提出一种车身调平设计方案。倾角传感器判断车身的倾斜状态,然后通过控制前后两侧液压油缸行程,进而改变平行四杆机构的形状进而实现车身调平。
1.1.3 重心可调式调平机构
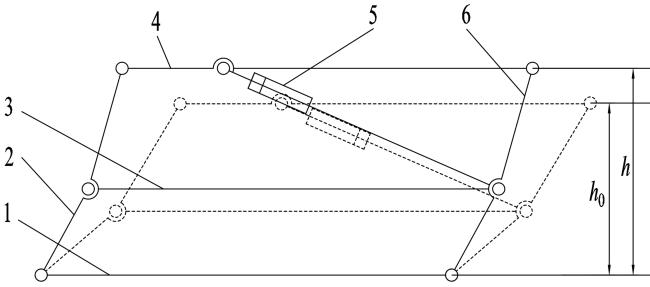
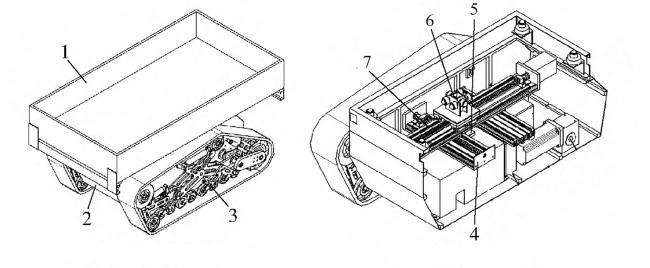
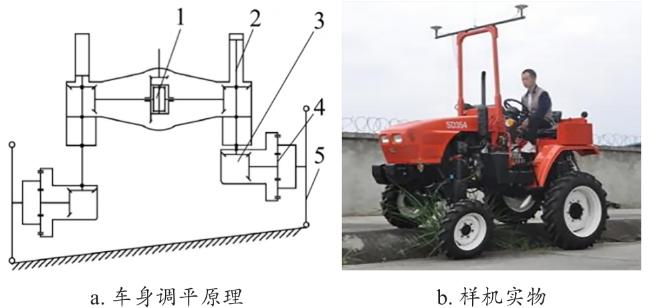
拖拉机在犁耕作业和上坡时由于重心位置不当容易出现犁耕行驶稳定性变差、牵引效率降低、上坡稳定性降低等问题。重心可调式调平机构是通过调整车辆某一部分的重心位置,通过移动或摆动配重块或车体某一部分来改变整车重心位置,以便更适应坡地作业。以调整车体某一部分来改变整车重心位置为例,重心可调式调平机构简图如图5所示,通过横向滑轨与纵向滑轨改变货台相对于机体的位置来改变整机的重心位置。
车辆调平的本质其实就是重心位置的调整。重心位置改变的效果为履带接地压力的改变(车辆侧翻的临界状态为一侧履带压力等于0),最终影响车辆两侧履带牵引力的变化。需建立履带车辆坡地重心调整数学模型,探究车辆调平角度、重心位置与坡度的对应关系,得出调平后的接地压力提升系数与牵引力提升系数,对于重心可调拖拉机的设计具有指导意义。
1.1.4 折腰扭腰式调节机构
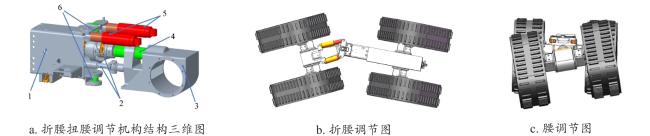
为了简化车身调平机构,借助单点球铰原理开发了折腰扭腰式拖拉机,与传统拖拉机相比折腰扭腰拖拉机最大的优势在于通过性好、机构紧凑,折腰扭腰调节机构结构简图如图6所示。折腰机构由两侧折腰转向液压缸控制转向,使得车头直接旋转一定角度,可以大幅度缩小转弯半径;扭腰机构采用前后分段式连接,传动系统中间设计有扭腰摆动姿态调整装置(由动力传动万向节、扭腰仿形轴组成)连接后车体变速箱,可使前后车身呈一定角度扭转,实现了驱动轮与行走轮在不同高度地表的可靠附着,便于在狭小空间和崎岖路面灵活作业,牵引能力和爬坡稳定性较好,特别适合中国山地丘陵地区。但折腰扭腰拖拉机的后期维护和维修难度较大。
意大利安东尼奥卡罗拉公司生产的MACH 4R型山地拖拉机(图7)可实现四轮驱动及轮履互换[15],具有折腰扭腰功能,动力强劲且适应各种凹凸不平道路,有较好的缓坡地适应性。但该型拖拉机体型略大且价格相对昂贵,因整车不可调平,在大坡度地面工作时,安全性及山地适应性较差,难以适应中国丘陵山地坡陡路窄、地块碎小的作业场景。意大利BCS公司生产的Sky-Jump-V950山地拖拉机[15](图8),具有折腰扭腰功能,前轮后履模式具有牵引性能好、压实破坏小的优点,在果园、茶厂、苗圃等复杂作业场景应用广泛。搭载DUALSTEER型双向转向系统。该结构可使拖拉机的转弯角度达到70°,使转弯半径进一步缩小,并使其在陡坡作业时具有良好的牵引力和稳定性。


为提高丘陵山地拖拉机的调平精度和动态实时姿态调整,山东农业大学联合山东五征集团[16]借鉴国外的折腰扭腰技术设计了一种扭腰轮式拖拉机(图9)。该拖拉机前后车身可绕中间扭转轴旋转一定角度。扭腰姿态调整装置可提高丘陵山地拖拉机的地形适应性与作业效率。为适应国内丘陵山区地块小、经济条件差等客观因素,中国一拖分别研发生产了70、80和90马力3种马力段的丘陵山地拖拉机(图10),重点满足西北黄土丘陵、山东丘陵等坡耕地和宜机化改造后的市场需求。这种拖拉机采用发动机前置布置、折腰转向、四轮等大、双向驾驶、四轮制动等多项新技术,具有丘陵山地作业稳定性好、通过性高、转向灵活等优点,特别适用于丘陵山地、坡耕地、果园等特殊作业环境。


折腰扭腰拖拉机转弯半径小、机动灵活,十分适合中国坡陡路窄、地块碎小的复杂环境工况。后续研究可以将折腰扭腰与调平结构相结合,既小巧灵活又可兼顾安全可靠,解决了现有拖拉机在丘陵山区作业时转场困难、地块碎小、坡陡凹凸的难题。但折腰扭腰拖拉机车头跟车尾是两个独立部分,研究的难点在于如何协调折腰扭腰与调平系统的配合关系,使得每个轮子的接地压力最优化。
1.1.5 全向调平机构
由于平行四杆、液压高差与折腰扭腰式调平主要实现的是整机的横向调平,缺乏纵向的调平。全向调平机构是通过四轮独立液压调平机构或多层车架液压调平机构实现车身在崎岖坡地行驶时仍能时刻保持水平状态,可同时实现横向与纵向调平,但需要多传感器同步配合且对精度和相应时间要求较高。

针对履带式联合收获机在不平坦地表作业时,拖拉机车体发生倾斜和颠簸,导致操作环境变差、严重影响作业效率和驾驶舒适性。王祉涵[18]基于神经网络比例-积分-微分控制(Proportional-Integral-Derivative Control, PID)算法来解决PID控制时出现超调量和调平延迟高的问题,验证了神经网络控制优于传统PID控制及仿真试验的可靠性。舒鑫[19]提出一种“位置误差控制法+角度误差控制法”的调平控制策略。该自动调平系统能完成离地间隙调节和底盘调平,可大幅提高在崎岖坡地的适应性。杨华兵[20]设计了拖拉机自动调平控制系统的模糊PID控制算法,建立了拖拉机车身平台X轴和Y轴速度调平控制的数学模型。上海交通大学联合山东五征集团研制了一种基于双闭环的PID控制算法,可根据地形特点主动调整拖拉机机身的姿态,具有较好的坡地适应性[21]。赵恩鹏[22]设计研发了一种轮式丘陵山地拖拉机车身调平系统,通过分别改变前驱动桥和后驱动桥调平液压缸行程来实现机身的调平,并从运动学与动力学方面进行了验证,但研究缺乏对整体结构的强度验证,在高速颠簸或高冲击载荷下,结构的安全性难以保证。李洪龙[23]设计了一款拖拉机调平液压系统并建立了数学模型,可以使拖拉机在15°的坡地上平稳行驶且不发生侧翻风险。刘平义等[24]设计了一种仿形动态调平底盘,可以通过调节悬臂夹角来实现底盘的调平,全时多轮驱动保证了拖拉机的高牵引效率和高响应速度。传统拖拉机在15°的坡地上作业基本都不会发生侧翻。后续研究应针对在15°及以上坡度行驶时遇到突发情况(如遇到凸起的土坎或较深的凹坑)时的紧急应对策略,建立相应的数学模型及动力学模型。
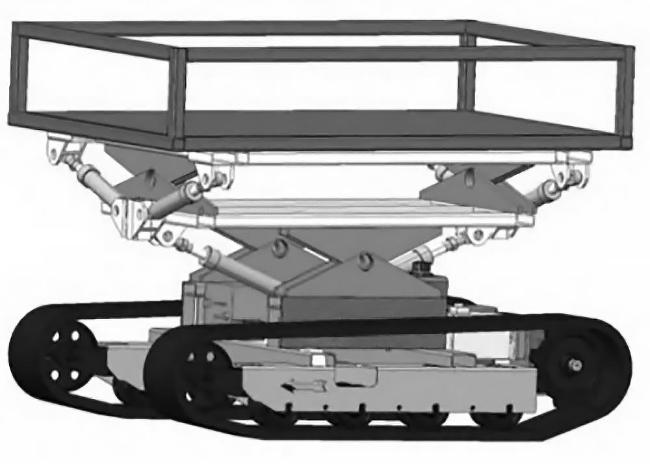
针对拖拉机丘陵山区作业时车身不能随地形起伏变化自适应平衡,导致作业安全性低、作业效果差等问题,邹大庆等[27]根据丘陵山区农业机械作业需求,提出了一种点线复合支撑式“三层车架”液压全向调平系统(图13)。该系统全向调平角度最高可达20°,为履带式作业机整机动力学模型构建和调平控制器设计奠定了基础,提高了农业机械在丘陵山区复杂地形环境下的作业效率和安全性,但车架层数较多会提高整机的设计高度,需对结构进行集成优化。针对丘陵山区农业机械作业时的机身倾角变化大、工作品质和作业安全差等问题,孙泽宇等[28]以履带式作业机为研究对象,也设计了一种基于“三层车架”的液压全向调平系统,并提出了复合Q学习-BP(Back Propagation)神经网络-PID的全向调平控制策略,进行了横坡路面和纵坡路面的整机试验,满足丘陵山区农业机械调平性能需求。
不同车身调平机构虽结构和原理各异,但最终目的是实现在复杂路面的平稳行驶。五种类型调平机构的优缺点对比如表1所示。平行四杆与液压差高式结构简单,面对较为复杂的地形时调平效果较为一般;折腰扭腰式更适合于小范围连续起伏的崎岖路面,对于大坡度等高线作业几乎无调平作用;重心可调与全向调平式是山地调平拖拉机今后发展的趋势,坡地牵引性与适应性均较好,但需降低整机的制造与保养成本。
表1 五种类型拖拉机调平机构对比Table 1 Comparison of five types of leveling mechanisms |
| 调平机构 | 优点 | 缺点 | 适合应用场景 |
|---|---|---|---|
| 液压差高式 | 1. 等高线作业效果好 2. 结构原理简单 3. 坡地适应性好 | 1. 上坡稳定性差 2. 地面附着性较差 | 1. 坡面起伏较缓 2. 坡地等高线作业 |
| 平行四杆式 | 1. 结构简单 2. 故障率低 | 调平自由度有限 | 1. 坡面起伏较缓 2. 坡地等高线作业 |
| 重心可调式 | 1. 牵引效率高 2. 上坡稳定性好 3. 坡地适应性好 | 1. 结构较复杂 2. 需要多层车架 | 1. 上、下陡坡作业 2. 坡面起伏较陡 |
| 折腰扭腰式 | 1. 对崎岖地面适应性好 2. 转弯半径小 3. 灵活性好 4. 结构紧凑 | 1. 不适合大坡度作业 2. 价格昂贵 3. 结构复杂 4. 对驾驶人员水平要求较高 | 1. 坡面崎岖不平 2. 碎小地块 3. 坡面起伏较缓 |
| 全向调平式 | 1. 牵引效率高 2. 上坡稳定性好 3. 坡地适应性好 | 1. 价格昂贵 2. 维修保养复杂 | 1. 上、下陡坡作业 2. 坡面起伏较陡 3. 坡面崎岖不平 |
1.2 驾驶室及座椅调平技术
山地农机的作业环境复杂,驾驶室及座椅调平技术通过角度传感器实时反馈校准驾驶室或座椅的姿态,使其时刻保持水平状态。驾驶室及座椅调平技术应用于丘陵山地拖拉机,可以缓解在崎岖不平或斜坡作业时驾驶员的姿态倾斜或左右颠簸的情况,减少驾驶者的疲劳感和对腰椎颈椎的伤害,改善驾驶的舒适性,使驾驶姿态时刻保持平稳,提高驾驶的安全性和作业的高效率。考虑驾驶人员的驾驶舒适性,在遇到频繁摆动的路况时,若调平系统灵敏度较高、反应速度及实时性较好,驾驶室或座椅也随之出现频繁摆动,虽可以达到实时调平的效果,但频繁摆动更易造成驾驶员的不适感,故研究难点在于在满足驾驶室或座椅调平的同时消除频繁摆动,兼顾驾驶员的驾驶感受。
驾驶室调平技术最先被应用于汽车上。通过传感器和车载计算机控制电磁阀给油缸供油的方法,实现了驾驶室的自动调平。瑞士瑞吉公司生产的SKH-60型山地拖拉机(图14)与瑞士Aebi公司生产的Terratrac系列山地拖拉机(图15)具备驾驶室姿态可调功能(驾驶室调平只有驾驶室随地形变化而调整角度,此处区别于车身调平。车身调平是整个车体的位姿调整),可使驾驶人员在坡地作业时始终保持水平姿态驾驶,整机重心较低,有较好的牵引附着性和越野性,且轮胎、轮距较大,有利于坡地稳定作业,但缺乏主动调平功能,在起伏较大的田地作业时存在一定安全隐患,且轮距较宽,在应对中国丘陵山区坡陡路窄、地块碎小的复杂作业环境时效果不理想。


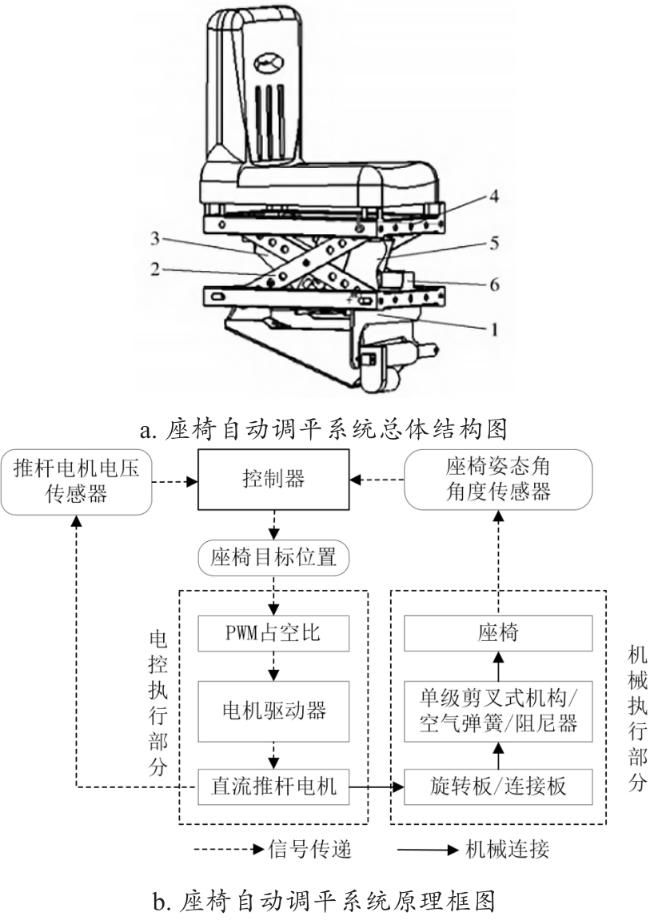
朱瑞祥团队[29-31]设计的座椅姿态自动调节系统在原有结构的基础上,将座椅一侧与固定座铰链,另外一侧底部安装滑动导轨,当车辆横向倾斜时,根据采集的座椅倾角信息,通过驱动电机使螺杆带动推杆运动以改变座椅该侧的高度,使其恢复到水平状态,并且当车辆出现严重倾斜影响正常作业时,系统会向驾驶员自动报警。陈黎卿团队[32]设计了一种基于人机工效学的农机座椅自动调平系统(图16),研究发现座椅倾斜不同角度时驾驶员上躯干会呈现不同姿态,提出了符合人体工程学的座椅舒适性调平控制策略,通过角度传感器实时传输座椅位姿并反馈至控制器,实现座椅的自动调平。史名奇[33]采用一种空间圆形式,使座椅整体在空间圆内转动,通过两自由度的串联机构实现座椅的调平。姚宗伯[34]设计了一种用于林业装备驾驶平台的自动调平系统(图17),可在大幅度起伏越障的情况下保持驾驶平台的水平,减少了工作过程中的颠簸和振动。王萧[35]在丘陵山地全液压履带底盘拖拉机的基础上,设计了一种三点支撑定位的自动调平系统,能够自适应坡度的变化并实时调节车身角度,最大调平时间不超过3 s,满足拖拉机的作业要求。
山地农机的驾驶室及座椅调平技术大都借鉴于汽车座椅相关技术。驾驶室调平对于驾驶的舒适性而言会更高,单纯座椅调平在结构和控制方面较为简单,但驾驶舒适性一般。现阶段的研究仅限于驾驶室或座椅横向的调平,在拖拉机上下坡或坡地转向时缺乏纵向的驾驶调平,且在上坡行驶时翘头容易形成前部视野盲区,导致不能及时发现前方突发状况(如土坎、凹坑),需增加多源环境感知系统(如雷达、多目摄像头),在感知到前方出现障碍物、凹坑时能及时预警,需添加环境感知人机交互系统,还需满足驾驶室或座椅调平的同时兼顾驾驶员的驾驶感受,可以基于PID控制添加一定的调平余量来消除频繁抖动。总体而言,在崎岖或斜坡作业的有人驾驶丘陵山地拖拉机均需配备驾驶室调平或座椅调平装置,应用驾驶室及座椅调平技术后不仅可以大幅度缓解驾驶员的疲劳感,还能改善驾驶的舒适性、提高驾驶安全性和作业效率。
1.3 车身与农机具姿态协同控制技术
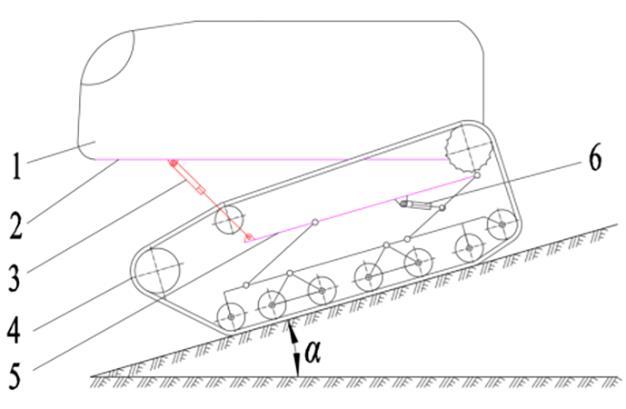
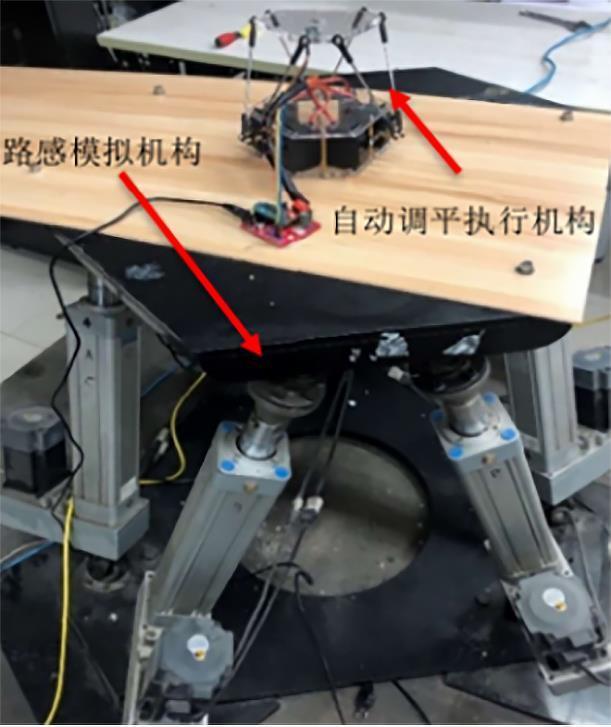
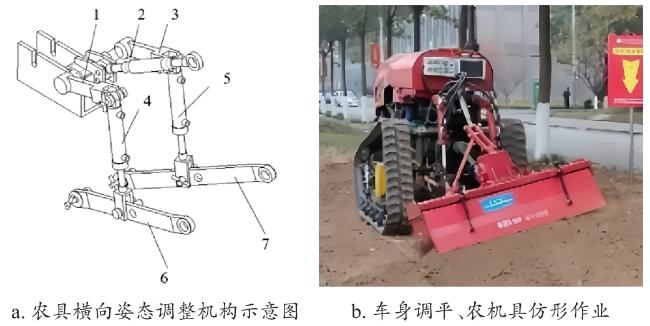
丘陵山区坡度大、地面不平整成就了复杂的作业环境。在此条件下,拖拉机车身易发生频繁倾斜,使行驶稳定性变差,对拖拉机的作业效果及作业效率均有较大影响,尤其拖拉机在丘陵山地开展旋耕、播种、植保、田间管理等作业时,农机具通常通过三点悬挂挂接在车身尾部,车身调平后悬挂的农机具就会随车身的移动而改变位姿,不能继续贴地作业。要保证农机具仿形作业,需要配备车身和农机具姿态同步控制系统,在实现车身调平的同时,悬挂的农机具也实现坡地自适应调整贴地仿形作业。车身与农机具坡地协同控制如图18所示,悬挂左右两侧均安装姿态调整油缸,在倾角传感器的反馈调节下控制车身调平油缸与左右两侧悬挂油缸伸缩,以达到车身调平与农机贴地仿形作业。为保证拖拉机在丘陵山地的作业效果(如耕深一致性、播深一致性、喷药均匀性等),必须配备农机具坡地自适应调平装置,使得农机具与地面始终保持水平接触,才能达到理想的作业效果。另一方面,针对丘陵山区分布地域广、作物种植多样化、土壤类型各异、农艺要求不同、气候气温降水差异性大的现状,研发适宜于区域性丘陵山区作业的专用农机具将大幅改善该区域的农业生产,在为农民增产增收的同时还能解放生产力。因此,开发拖拉机农机具坡地自适应调平技术是实现坡地仿形作业的关键。
目前,农机具坡地自适应调平技术多数用到PID技术,常用的有经典PID控制,模糊PID控制,双闭环模糊PID算法,增量式PID控制和基于BP神经网络PID控制等。PID控制成本低、环境适应性强、简单可靠,对于控制精度要求不是很高,而更重视系统的可靠性时,农机具坡地自适应调平使用PID控制能获得较高的性价比。
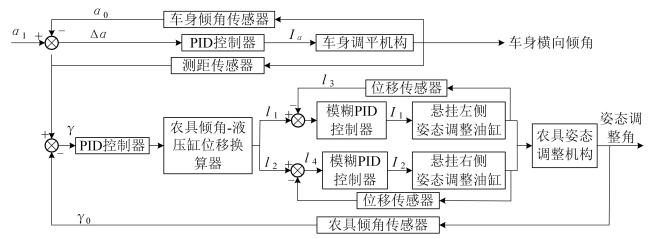
张锦辉等[36]基于神经网络PID算法设计了车身和农机具姿态同步控制系统,提高了姿态控制系统的响应速度和控制精度,能够满足丘陵山地复杂场景下拖拉机平稳高效作业。周浩等[37]设计了一种旋耕机自动调平系统,其控制系统通过角度传感器反馈的信息控制电磁阀驱动调平油缸,通过直线位移传感器测量调平油缸的伸长量,利用旋耕机与调平支撑架的几何关系实现旋耕机构的自动调平闭环控制,提高了旋耕机的仿形作业能力。蒋俊等[38]为满足配套农机具对坡地地形的适应性,设计了适用于丘陵山地拖拉机的电控液压悬挂系统,通过AMESim软件搭建系统仿真模型,分别对定、变负载2种工况进行了仿真分析,结果表明,速度、位移误差控制在5%以内,基本满足设计要求。杨福增等[39]针对坡地等高线作业时既要保持车身水平又要控制农具进行自适应仿形作业,提出了一种履带升降自动张紧装置,以满足丘陵山地作业要求;基于双闭环模糊PID算法设计了车身与农具姿态协同控制系统(图19),在坡地可开展耕、种、管等多种作业需求。吴帆[40]设计了一种旋耕机遥控驾驶与自动调平系统,拖拉机的后悬挂和机具调平系统机械结构由三点悬挂装置构成,用液压油缸代替提升杆,并使用控制器控制进出油量调节液压油缸的伸缩,从而实现旋耕机的地面仿形作业。谢斌等[41]设计了一种自适应测量农机具耕深的方法,将倾角传感器安装于提升臂上,控制器可根据反馈的角度信息输出特性推导出电压值与耕深值的函数关系,最终得到农机具实际耕深。但此方法仅靠角度传感器的信息来间接推导耕深值,存在的不确定因素(如传感器的累积误差、信息传输的延迟等)和外界环境干扰(如传感器的高频抖动、信号的滤波处理等)太多,应使用多传感器融合的策略增加测量的准确性与实时性。Irsel等[42]等为提高激光控制坡地平整机的运行效率,设计了更精确、更经济、更可靠和更符合人体工程学的激光控制调平系统,将现有的激光控制调平铲进行了重新设计,使其自动化程度更高。该机器可以通过更少的重复次数和更低的油耗来平整较硬的地面,平整精度可达0.05°。
农机具调平坡地自适应技术的主要难点在于:一是要满足车身与农机具姿态同步控制。这对控制的一致性、控制精度及响应时间要求高,其中的任何一项不达标都会直接影响到作业质量。二是传感器的选取。目前应用最广泛的是利用角度传感器测量倾斜角度,通过反馈信号控制对应油缸的伸缩,加入PID控制之后可以实现快速、平稳、准确地控制农机具达到指定的倾角,还可以将激光技术应用到农机具调平及旋耕地面的找平中。此技术响应更快、精度更高。三是作业信息反馈。农机具仿形作业后,其真实的作业效果缺乏及时的反馈与调整,应添加相应的传感器用于作业情况的反馈与调整,如播种作业应实时监测每粒种子的播深信息。
2 防翻保护装置与预警系统研究现状
丘陵山区地形崎岖、坡陡路窄,拖拉机行驶侧翻的危险性大,是造成驾驶员伤亡的主要原因之一。2018年,日本发生了274起致命农场事故,其中拖拉机翻车事故高达56起[43]。2021年,韩国共发生与农业机械相关的事故44 302起,其中翻车和侧翻事故为11 683起[44]。美国每年因拖拉机侧翻事故导致超400人死亡[45]。中国也时常发生拖拉机侧翻致人伤亡事故[46]。拖拉机防翻及保护装置可避免拖拉机在发生侧翻时对驾驶员人身造成伤害。拖拉机翻车预警系统可提前告知驾驶员拖拉机所处的危险状态,及时发出警报或直接由计算机接管拖拉机,提高驾驶的安全性。因此,研发丘陵山地拖拉机防翻及保护装置与预警系统是保障驾驶人员安全的关键。
2.1 防翻保护装置

尽管拖拉机的设计在安全方面取得了进展,但在操作拖拉机时,横向侧翻是最危险的情况之一,需要设计更加坚固的翻车保护结构。由于侧翻时车辆自重和惯性导致安全架需承受较大载荷,为了防止安全架在侧翻过程发生较大的变形或者毁坏,意大利波伦亚大学Jang等[47]在基于ROPS结构,研究了一种计算拖拉机实际保护结构吸收能量的模型,在拖拉机发生侧翻时,可更好地保护驾驶员的安全。ROPS目前应用于大多数拖拉机作为保护操作员的唯一装置,然而它并不能防止翻车事故造成的人员伤亡和机器损坏。考虑安全装置对拖拉机作业通过性的影响,美国田纳西大学Ayers等[48]开发并测试了可从拖拉机座椅操作的可折叠ROPS提升辅助杆,通用升降辅助设计(杠杆和扭转弹簧-集成止动支架)能够满足人体工程学标准。西班牙纳瓦拉公立大学Latorre-Biel等[49]开发了一种廉价的翻转能量耗散装置,能够吸收翻转能量,不会塌陷或出现严重变形而侵犯到安全区,以提高ROPS结构的安全性。
2.2 防翻预测预警系统
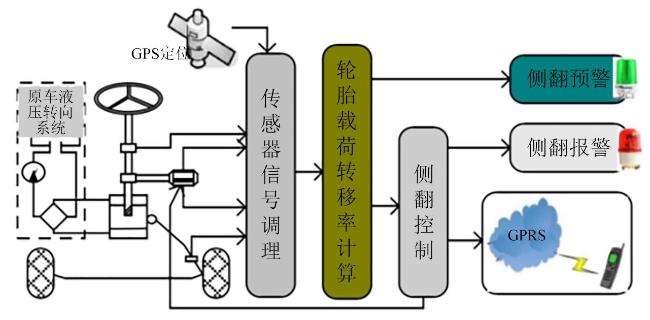
防翻预测预警系统可以在车辆侧翻前提前感知翻车危险,对于丘陵山区拖拉机的驾驶安全性起着至关重要的作用。拖拉机翻车本质上是拖拉机重心位置落在安全区以外,一侧车轮或履带的接地压力趋于0,故关键在于建立基于拖拉机行驶速度及整车重心位置的翻车预测模型,在拖拉机将要达到极限翻车角度前,通过角度传感器与控制模块使其自动触发主动防翻系统,将拖拉机调节至稳定状态。
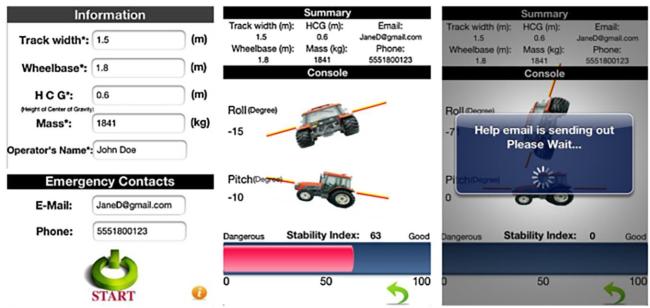
拖拉机驾驶模拟器是预测和预防倾翻事故的有力工具。日本东京大学Watanabe和Sakai[43]开发了一种带有运动系统的拖拉机驾驶模拟器,在虚拟试驾中重现了日本陡峭通道斜坡上拖拉机翻覆事故。该模拟器可应用于拖拉机安全研究和产品开发。车辆稳态模型可以很好地预测车辆的稳定性情况。英国哈德斯菲尔德大学Malviya和Mishra[45]开发了一种车辆稳态预测模型,研究车辆在各种操纵、横风和倾斜地面条件下的稳定性,并将关键信息及时反馈至系统,可实时预测车辆状态。Baker和Guzzomi[50]研究发现拖拉机的前后质量分布会影响斜坡行驶的稳定性,数据表明,稳定性随着前部质量的增加而降低。澳大利亚西澳大学Guzzomi[51]提出在拖拉机上安装四轮制动器,此设计会增加出现翻车风险时整车动能的消耗,从而阻碍翻车的进一步发展。韩国江原大学Jang等[44]通过动态模拟分析了地面坡度角、障碍物形状和高度对拖拉机在硬质路面上行驶的侧倾和后倾的影响。为检验不同几何形状和质量规格的拖拉机在不规则倾斜地面上运行对车辆横向稳定性的影响,Ahmadi[52]开发了一种动态模型,研究了拖拉机在发生翻转和防滑时的不稳定性情况,并制定了拖拉机稳定性指标。日本九州大学Li等[53]建立了一种翻车预测模型,通过力学计算,得出拖拉机的速度和坡度角对倾翻稳定性有显著影响,当轮胎即将与地面失去接触时,操作员可根据系统提示主动纠正拖拉机的运动,达到防止发生侧翻的效果。西班牙卡塔赫纳理工大学Ojados等[54]设计了一款可展开式翻车保护结构,在拖拉机即将发生翻车的情况下自动展开翻车保护结构,发生侧翻后,系统会自动发送带有全球定位系统(Global Positioning System, GPS)位置的电话消息,以联系紧急响应人员。哥伦比亚大学Liu和Koc[55]开发了一款拖拉机翻车检测和应急报告软件应用程序,可以实时检测拖拉机的GPS位置、时速和稳定状态,并能在发生翻车事故时向紧急联系人发送事故报告,极大地保障驾驶员的安全。拖拉机翻车检测系统如图21所示。
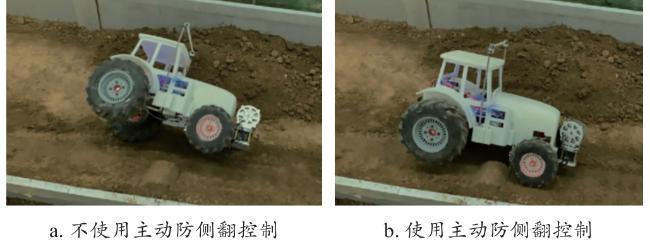
郭腾飞[59]针对降低拖拉机坡地作业易发生侧翻的风险,设计了一种轮式拖拉机侧翻预警系统,可向控制器实时提供车身的角度信息,基于极限侧翻夹角和延时操作反应夹角判断拖拉机所处的位姿情况和是否处于侧翻临界值,并实时反馈侧翻预警信息,提高驾驶员的行车安全性。康杰等[60]基于轮胎胎压变化设计了一种主动防翻系统,通过胎压传感器时刻检测每个轮胎的胎压变化判断是否存在侧翻风险。当系统检测到存在侧翻风险时拖拉机会自主采取主动减速或熄火操作,避免驾驶员在接到侧翻预警后而再采取措施的滞后性,降低了拖拉机侧翻的风险。庄家鹏[61]设计了一种姿态可调丘陵山地拖拉机,后桥末端传动机构具有可独立回转摆动功能,末端传动机构跟轮胎刚性连接,末端传动机构可绕后桥半轴套管做旋转运动;前桥采用具有地面浮动仿形能力的平行四边形机构,提高了拖拉机的防侧翻稳定性,并基于动力学仿真软件开展了侧翻试验,仿真结果表明倾翻稳定性较未调姿前的极限状态提高了10%,保证了驾驶员与拖拉机的安全。
2.3 丘陵山地拖拉机主动预警防翻系统面临严峻挑战
丘陵山地拖拉机防翻保护装置与预警系统关乎驾驶员的人身安全,将会成为未来研究的热点和难点。ROPS保护结构经过半个多世纪的发展,在吸能材料、结构和弹出方式上已较为成熟。国外研究已从注重ROPS保护结构的优化改进研究阶段演化到如今的翻车环境模拟预判模型与侧翻预警研究,但未从根源上通过控制策略或环境感知系统避免车辆的侧翻;国内研究侧重于改进车体、车架结构,加装主动防翻及侧翻的预警预报装置。
丘陵山区农田作业面临的最大危险就是拖拉机的倾翻,复杂多变的恶劣作业环境导致当前具有主动预警防翻系统的山地拖拉机研制与产业应用面临以下挑战:一是地面坡度大且障碍物高度、深度及形状不一,是导致拖拉机翻车的最主要外界因素,当坡度升高或拖拉机重心升高时更容易发生侧翻和后翻;二是拖拉机的行驶速度与碰到障碍物时角动量与倾翻临界状态的变化规律难以确定,需建立拖拉机不同速度下经过不同坡度不同类型障碍物时的动力学模型,以此可预测拖拉机的倾翻临界状态;三是防倾翻结构与系统设计难度大,防倾翻结构既要满足整机强度刚度要求又要到达调整整机重心的作用,防翻预警预报系统需到达对拖拉机临界倾翻姿态进行主动紧急修正的作用,但是将上述结构与系统集成到拖拉机上并保证在大坡度、高复杂性的恶劣作业环境下有效可靠工作仍面临挑战。
未来的研究侧重点应在兼顾装配防翻保护结构的同时配备具有人机交互的预警系统,在即将发生侧翻风险的瞬间,拖拉机需主动接管并触发防翻控制策略,最大程度上将失稳的拖拉机恢复至安全状态。
3 面临的挑战与展望
本文总结了国内外丘陵山地拖拉机调平及防翻系统的研究现状,从拖拉机车身、驾驶室及座椅调平技术,拖拉机机具调平坡地自适应技术,以及拖拉机防翻保护装置与预警技术方面做了详细综述。
拖拉机车身调平技术中平行四杆与液压差高式结构简单,折腰扭腰式更适合连续起伏的崎岖路面,重心可调与全向调平式坡地牵引性与适应性均较好;驾驶室及座椅调平技术基于角度传感器自适应控制,关键在于缓解驾驶疲劳提高舒适度;车身与农机具姿态协同控制技术大都采用PID控制技术实现协同控制,但缺乏作业效果反馈机制;拖拉机防翻保护装置与预警技术在防翻保护架的基础上,通过环境模拟感知提前预判翻车危险信号并及时反馈。受复杂环境和坡度的影响,丘陵山地拖拉机的研发一直是热点和难点,未来着重点应落脚到安全性与智能化方向。
3.1 面临的挑战
拖拉机经过一百多年的发展,在技术、结构、工艺与可靠性方面已相对成熟,但丘陵山地拖拉机的研制与产业应用还面临较多问题与挑战,主要有以下几个方面。
1)各地区地形地貌及气候差异性大,机型的通用性是一大难题,既要满足南方水田(降水充沛,主要种植作物为水稻,红壤土为主,机器离地高度要求较高),又要满足北方旱田(降水较少,主要种植作物为小麦、高粱、谷子,黄土、黑土为主;转场困难、要求机型小且灵活)的耕作环境,还要克服地面坡陡起伏大、地块碎小零散、机耕道弯窄的困难,要求拖拉机具有转向灵活、结构稳定易操控及行驶稳定性好等特性。
2)动力机械要匹配并满足各个环节(包括耕、种、管、收、运等)的作业需求问题,针对特定场景、特定作物设计满足作业质量与作业效率的可靠农机具及配套调平及反馈系统。
3)丘陵山地拖拉机设计理论与流程照搬大田拖拉机的现有理论存在不适用的问题,需加入关键的条件参数,如地面坡度、土壤与轮胎或履带的接触参数、土壤沉降等影响拖拉机接地压力、牵引力的关键参数,建立新的模型和计算公式。
4)丘陵山地拖拉机的智能化发展问题,坡地的作业导航避障、坡地作业环境的三维绘制与图传、不同坡地之间的自动转场均存在技术难题。
3.2 展望
可靠性和实时性好、灵敏度和精确度高的自动调平技术,车身状态实时监控、拖拉机侧翻预警与自动调整技术以及微型化、无人化、自动化技术将成为今后丘陵山地拖拉机研究的重点,具体还需从以下方面开展深入研究。
1)丘陵山地拖拉机车身、驾驶室及座椅调平技术方面,探索更适宜山地作业的调平机构和反应迅速的调平算法,构建更可靠的调平反馈模型,消除反复调平过程中产生的累计角度误差,研究丘陵山地拖拉机姿态调平的原理,分析、验证新型结构和算法的稳定性、可靠性,尤其要确保拖拉机姿态调平后仍然具备较好的牵引附着性能,避免出现轮胎、履带线接触于地面或悬空的情形。
2)丘陵山地拖拉机农机具坡地自适应调平技术方面,农机具与坡面的仿形效果及响应速度直接影响了作业的效率和质量,可借鉴最先进的激光控制调平系统。该系统响应更快、精度更高,还需进一步深入研究土壤含水率、坚实度等参数对拖拉机悬挂机具离地高度及耕作深度的影响规律,构建自适应耕作数学模型。
3)丘陵山地拖拉机防翻保护装置与预警系统,在理论方面,需构建车辆重心调整位姿与斜坡履带牵引性能的数学模型,构建车辆坡地行驶、坡地转向与地面力作用下的动力学模型,构建车辆极限侧翻状态的侧翻预测数学模型;在技术方面,可增加环境感知技术,对周围环境提前生成,在拖拉机未到达危险点时提前报警,避免当拖拉机位于危险点时才采取措施,可极大地降低侧翻发生的风险,保障人机安全。
4)丘陵山地拖拉机微型化、无人化、自动化技术方面,需致力于推进农机化与信息化融合,研究农机精准导航驾驶技术(如不规则坡地路径规划与避障)、农机全过程作业质量监测技术(如各项土壤参数、耕深、播深、漏播率等)、农机作业远程调度与管理等技术(如多机协同技术),关键在于其定位、控制、规划和感知。这类技术的应用可极大提高作业精度、作业效率和操作人员安全性,可有效解决丘陵山区坡陡路窄、地块碎小、作业难度大、危险系数高等难题。
5)丘陵山地拖拉机坡地纵向稳定性计算需理论重构,当进行陡坡作业时,先前理论计算因未考虑大坡度(坡度≥25°)导致拖拉机爬坡能力不足,致使拖拉机驾驶员只能选择倒驶上坡,且影响作业效率。需构建适用于坡地条件下的土壤-压力预测模型,从而得到车辆在坡地上牵引力的变化规律,对于山地拖拉机的前期设计,参数的选项具有至关重要的指导意义。纵向稳定性是拖拉机在坡道上行驶不致发生倾翻和滑移的性能,主要用上坡极限倾翻角与滑移角表示,对评价拖拉机的坡地作业适应性有重要意义,故亟需对丘陵山地拖拉机坡地纵向稳定性计算理论进行重构。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}