



0 引 言
在粮食需求不断攀升以及农业生产资源日益紧张的双重压力下,粮食生产面临着前所未有的挑战[1, 2]。提高农业生产效率、优化农产品质量、保障粮食安全已成为农业发展的迫切需求。水稻作为相对重要的粮食作物之一,其生产效率与产量直接关系中国粮食安全的稳定与可持续发展[3]。当前,随着农村劳动力向城市转移,从事水稻种植的劳动力数量减少且年龄结构老化,这导致了水稻种植过程中劳动力成本上升,一些环节甚至出现劳动力不足的情况,影响了水稻生产的规模和效益[4]。另一方面,传统水稻种植方式对水、肥、药等资源的利用效率相对较低,在施肥、施药等田间管理上,往往存在过量施用的情况,不仅增加了生产成本,还对土壤、水体等生态环境造成了污染。同时,近年来气候变化带来的极端天气事件频发,对水稻生产造成了严重影响[5]。
作为现代农业的高级形态,智慧农业是信息技术与农业生产深度融合的产物[6]。利用物联网、大数据、人工智能、无人驾驶等先进技术对农业生产进行智能化、精准化管理,旨在提高农业生产效率、降低生产成本、减少环境污染,实现农业可持续发展。水稻智慧无人农场作为智慧农业的重要组成部分,是实现水稻智慧生产的重要途径之一[7]。其打破了传统农业靠天吃饭、粗放管理的模式,通过集成应用现代信息技术和智能装备[8],实现了水稻生产的全链条智能化、无人化管理。从水稻种植前的土地准备、稻种处理,到种植过程中的灌溉、施肥、病虫害防治,再到收获后的储存、加工,每一个环节都实现了精准控制和优化管理[9]。这种新型生产模式,不仅提高了水稻生产的效率和质量,还降低了生产成本,减少了对环境的污染,为水稻生产的可持续发展提供了有力支撑[10]。
目前中国已有多个地区开展了水稻无人农场的应用和实践。截至到2024年,已有超过20个省份开展了智慧无人农场的建设,涵盖了从东北的黑龙江到南方的广东等多个稻作区。水稻无人农场不仅在数字化感知、智能化决策、精准化作业和智慧化管理等关键技术上取得了重大突破,而且极大地提高了产量和经济效益。技术上,基于北斗的精准导航技术提高了土地产出率0.5%~1.0%,农田精准平整技术节水20%~30%,节肥5%~10%,增产5%~10%[11];产量上,以广东增城无人农场为例,2021年早稻种植每公顷产量达到9 934.35 kg,远超农民传统种植的7 500 kg[12];经济效益上,全程“无人化”种植模式,总体每公顷成本降低12.1%,在播种环节公顷成本降低了45.65%[13]。无人农场正逐步成为现代农业发展的重要方向。
水稻智慧无人农场涉及农业科学、信息技术、机械工程、环境科学等多个学科领域,技术成熟度、基础设施建设、农民接受度,以及政策支持等方面均成为制约其发展的关键因素。此外,智慧农业技术的高投入与长周期回报特性,也增加了其推广应用的难度。本文通过梳理水稻无人农场在产前、产中、产后等环节的智慧化生产研究进展与问题,分析发展水稻无人农场亟待解决的关键技术,为中国水稻智慧化无人农场建设提供一定的支撑和发展思路。
1 水稻智慧无人农场系统架构
以往研究通常以农业生产体系中的“耕种管收”四大生产环节进行综述,而本研究以水稻生产全流程智能化、无人化为核心,提出了涵盖生产流程更加全面的产前、产中、产后三大环节。以此三大环节为脉络,对各环节所涉及的关键技术进行系统梳理。整体架构遵循从技术原理到实际应用,再到问题剖析与解决方向的逻辑顺序。
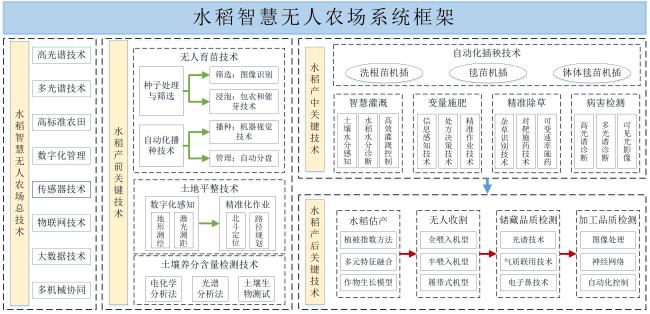
水稻智慧无人农场系统架构如图1所示,产前环节聚焦水稻智慧化无人生产的前期准备工作,以高标准农田建设为环境基础,对育苗、土地平整、土壤养分检测三部分关键技术与研究现状进行总结;产中环节以水稻智慧化无人生产的田间管理过程为核心,对种植(插秧)、田间管理(施肥、灌溉、杂草管理、病害诊断)两部分的特点、发展现状及应用效果进行评述;产后环节围绕水稻成熟中后期的生产作业,对估产、收割、储藏及加工品质检测等现代信息技术赋能的部分进行综述。此外,本文以国内外水稻智慧无人农场建设案例为切入点,深入探讨水稻智慧无人农场的发展现状以及面临的挑战,并分别对科研院所、高新企业、政府政策、合作社等方面提出针对性建议,为水稻智慧无人农场建设提供有力的支撑与清晰的思路。
2 水稻产前智慧化关键技术
水稻产前环节的智慧化关键技术主要包括:高标准农田建设、无人育苗、土地平整及土壤养分含量检测等。
2.1 高标准农田建设
高标准农田是指通过科学规划和现代化技术手段,将耕地进行综合治理和改造,使其具备高产稳产、抗灾减灾、节水节肥等能力的一类优质耕地。其目标是提高土地生产力、资源利用效率和农业综合生产能力[14]。高标准农田通常具备平整的地形、良好的排灌系统、合理的田间道路布局,以及科学的种植结构,能够为现代农业的机械化和智能化操作提供基础。
高标准农田为智慧无人农场的建设奠定了物理环境基础。智慧无人农场依赖于精准的土地管理和基础设施,如平坦的地形、完善的水利设施,这些正是高标准农田的核心内容。通过高标准农田的建设,可以更好地引入无人机、自动化插秧机、智能灌溉系统等智慧农业设备,为实现无人化操作和智能管理创造条件[15]。
建设高标准农田需要多项技术的支持。首先是土地平整和土壤改良技术,通过激光平地等手段提高耕地平整度,保证水稻种植时的均匀灌溉。其次是灌溉排水系统建设,利用高效节水灌溉技术和科学排水系统,确保水分供给的精准可控[18]。第三是田间道路建设和农田防护工程,确保农业机械能够顺利通行和操作。此外,信息化管理系统的引入也是关键,高标准农田通过物联网技术、远程监控等手段,实现对土壤墒情、病虫害、水肥管理等的实时监测和数据分析,为智慧农场提供决策支持。
2.2 无人育苗
水稻育苗阶段的管理水平直接决定了后期栽培和收获的效率及质量。因此,育苗技术是无人农场的重要环节之一。目前,智慧化无人育苗主要包括两个部分,分别是种子处理与自动筛选,以及自动化播种。
2.2.1 种子处理与筛选技术
种子品质是影响水稻苗期生长和最终产量的关键因素。无人育种旨在通过自动化设备和精准传感技术形成一个高效的全流程智能化系统,具体如下。
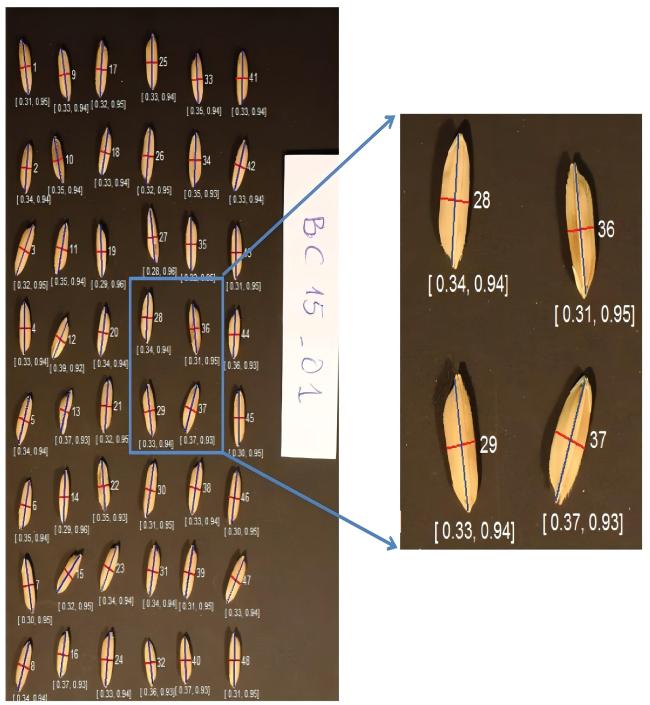
(1)自动化种子筛选系统。基于图像识别和机器视觉技术,自动筛选出颗粒饱满、发芽率高的优质种子,并剔除受病虫害侵染或形状不规则的劣质种子。Fabiyi等[19]从高分辨率RGB和高光谱图像中提取的空间和光谱特征,自动筛选和分类水稻种子样本,图2为空间特征提取结果,每个种子的ID号显示在其右侧。为进一步提高筛选精度,封玉搏等[20]结合相机控制软件和多光谱图像采集设备,设计了一款多光谱图像处理软件,通过算法识别种子品质,并实现自动分类,检测优质种子的准确率为93.69%,劣质种子的准确率为91.91%,每张图像的检测时间仅为0.24 s。Baek等[21]基于高光谱成像技术提出了一种检测被细菌性穗枯病感染的变色水稻种子的技术,大幅提高了病变种子的识别率,为无人播种提供技术支撑。
2.2.2 自动化播种技术
水稻无人农场的播种阶段依赖于集成播种机、种子定位系统,以及育苗盘输送设备等自动化播种系统,实现精准和均匀地播种。以下是相关技术的具体应用。
(1)高精度播种设备。基于机械手臂和高分辨率摄像头的播种设备能够精确定位种子放置点,并根据育苗盘的特点调整播种密度,确保种子分布均匀,以优化出苗率。为提高杂交稻钵苗育秧的播种精度,陈林涛等[24]改进了智能双充种型孔滚筒播种器,增加二次清种区并优化护种部件,通过二次清种及强制投种,播种合格率大幅提升,重播率和种子破损率显著降低。Jin等[25]则开发了一种基于双位置反馈调整(Dual Position Feedback Adjustment, DPFA)的高速精确定位播种控制系统,利用西门子可编程逻辑控制器(Programmable Logic Controller, PLC)与模糊比例积分微分(Proportional Integral Derivative, PID)算法,确保机械滚筒式种子轮与托盘之间的精准对位,播种合格率达97.06%,且具备材料短缺警报功能,准确率为100%。为进一步优化播种系统,通过机器视觉技术,Liu等[26]基于图像分析和深度学习,提出了一种自动评估水稻育苗盘播种质量的模型。采用虚拟网格图像分割方法,将育苗盘划分为多个网格图像,并使用改进的ResNet50模型集成通道(Squeeze-and-Excitation, SE)注意力机制进行分类和标记。实验结果显示,该方法能够快速、精确地检测缺失播种区域,提高了播种质量评估模型精度。
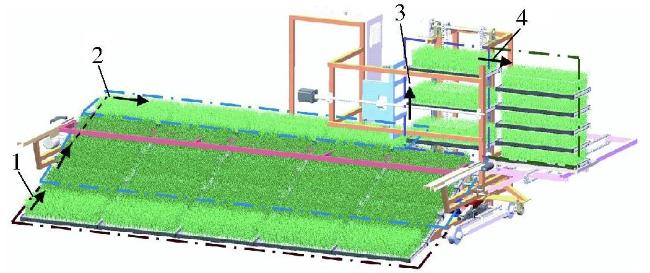
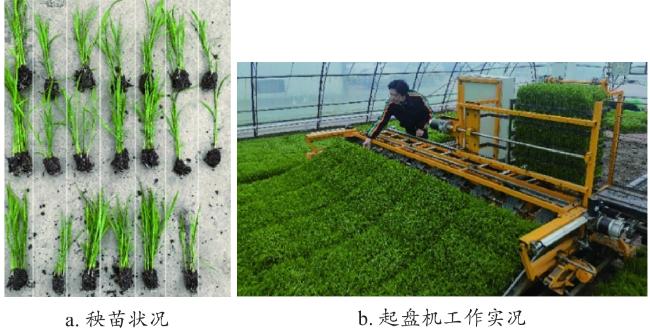
(2)机械化育苗盘管理。播种后,自动输送系统将育苗盘转移至育苗床,并根据需求进行自动堆叠、码放和分区管理[27]。衣淑娟等[28]设计了一款具备轴向辅助推送功能的钩杆式提升装置,如图3和图4所示,用于解决叠盘暗室育秧模式中全自动起盘机的稳定性问题。通过仿真试验优化托盘间距、输送速度和抬起角,田间验证结果显示起盘合格率达97.5%,叶片及硬盘的损伤率明显降低。Zhou等[29]设计了一种自动育苗盘铺设系统,包含龙门桁架移动装置、铺盘小车装置及传感器控制单元。系统通过凸轮移动实现抱、夹、铺、恢复四个动作,自动铺设育苗盘。采用交叉耦合和主从随动控制策略,优化了铺设精度。实验结果表明,铺设效率提升35.7%,达380托盘/h,满足机械化要求。
通过自动化播种设备与机械化育苗盘管理系统的结合,水稻无人农场能够高效、精确地完成播种作业,大幅提高了播种的效率和质量,为后续育苗过程的顺利进行打下坚实基础。
综上所述,水稻无人农场的育苗期管理依赖于高度自动化的设备和智能化控制系统,这一整合系统在减少人力投入的同时,大幅提升了生产效率。而且,目前已有多种水稻播种机、育苗摆盘机投入使用,如衡东辉远科技公司开发的循环运动式育苗设备、播种流水线等[30]。然而,当前无人农场的育苗技术仍面临一些技术挑战,如传感器的精度、图像识别的鲁棒性和环境控制的动态调节等,未来仍有巨大的提升空间。
2.3 土地平整
土地平整技术能够改善水稻生长环境,提高土地利用率,优化农田布局,有助于提升作物产量和农业可持续性发展[31]。
2.3.1 土地平整的数字化感知
2.3.2 精准化土地平整作业技术
基于全球导航卫星系统(Global Navigation Satellite System, GNSS)与北斗定位技术的平地机在中国已经开始得到应用。尽管这些技术在旱地平整中已经取得了一定的进展,但在水田平整领域还未得到广泛应用,国内一些科研院所和高校正在尝试研究水田平地机技术,以提高水田的平整度。
李根等[34]针对水田平整的需求,研究设计了一套基于全球导航卫星系统-实时运动学差分(GNSS-Real-Time Kinematic, GNSS-RTK)和实时线程(Real-Time Thread, RT-Thread)的水田平地机控制系统,实现了平地铲的精准控制,提高了平地机的作业质量。胡炼等[35]设计了基于全球定位系统(Global Positioning System, GPS)技术的水田平地机,采用比例-微分(Proportional-Derivative, PD)控制算法控制平地铲运动,实现了利用GPS控制水田平地机,能够满足水田精准平整的要求,有效改善了田面平整状况。王海琛等[36]利用无人拖拉机作业GPS定位点集将实际农业作业区域转化为规则矩形,在此基础上建立以无人拖拉机总转弯距离最短为优化模型,采用蚁群算法对无人拖拉机耕地作业路径序列进行搜索。
综上所述,无人农场土地平整技术通过融合数字化感知与路径规划技术,在提高农业生产效率的同时,还降低了生产成本。
2.4 土壤养分含量检测
土壤养分主要包括土壤有机质、全氮、全磷、全钾等。这些养分是水稻生长发育所必须的营养物质或微量元素,也是影响土壤肥力的重要指标。目前的土壤养分检测研究主要依托电化学分析法、光谱分析法等技术,结合统计分析与机器学习方法来实现对土壤养分的快速检测。
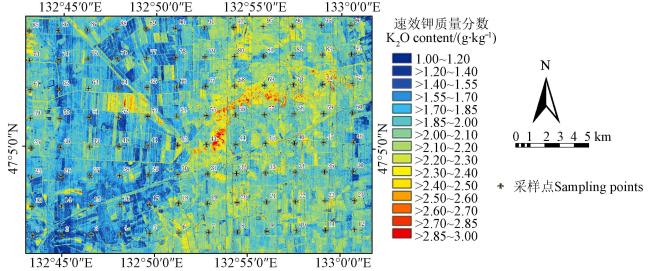
总的来说,电化学分析法可以检测土壤养分的时序变化情况,但检测仪只能实现固定点位的检测,不能实现全局观测;而光谱分析法可以解决这一问题,实现快速检测,但通常只能获取土壤养分的瞬时数据。因此,融合两种方法,实现对土壤养分含量的全方位检测是未来无人农场关键技术的重要研究方向。
3 水稻产中智慧化关键技术
水稻的自动化插秧技术适用于大规模生产的方式,有助于提高田间作业效率。水稻产中环节的智慧化关键技术包括:水稻旱直播技术、自动化插秧技术、精准变量施肥技术,智慧灌溉技术,田间杂草管理技术,以及田间病害诊断技术。
3.1 水稻旱直播
与传统的移栽方法相比,水稻旱直播技术通过简化栽培流程、节省劳动力和降低生产成本,展现出显著优势[42]。其中,精准播种技术是关键,要求播种机具备高精度和稳定性,以确保合理的播种密度和深度。
戴亿政等[43]设计了一种气吹集排式水稻旱地精量直播机,其田间播种的稻种破损率仅为0.46%。与此同时,王广成[44]开发的2BDF-10型水稻旱直播机则能够在旋耕、耙平后的水田中一次性完成平地、开沟、施肥、播种和覆土等多项作业,展现出极高的作业效率。此外,Zhao等[45]设计了一种专用于水稻旱直播的播种机组,并通过种子破损率、播种深度鉴定率、播种均匀变异系数和孔粒数鉴定率等指标进行三因素、五水平二次旋转正交组合试验,结果表明该设备符合水稻旱直播的农艺要求。Li等[46]针对现有薄膜覆盖旱稻直播装置的不足,提出了“小铲+伸缩管”的旱直播稻与薄膜覆盖相结合的播种方法,田间试验表明,这一创新设计能满足农业生产要求,且工作稳定可靠。这些研究和改进共同推动了水稻旱直播技术的发展,为提高生产效率和作物质量提供了有力支持。
3.2 自动化插秧
自动化插秧方式主要包括洗根苗机插、毯苗机插、钵体毯苗机插等[47]。
3.2.1 洗根苗机插
洗根苗机插基于传统的手插秧,秧苗长成后拔秧洗净根系泥土后扎成秧把,再将秧苗放在插秧机载秧板上,插秧机秧针模仿手指插秧。但洗根苗机插由于漏秧率和漂秧率高,插秧质量不理想,没有满足水稻机插农艺农机结合的要求[48]。在比较毯苗机插和洗根苗机插效果后,发现毯苗机插的效果更好,中国水稻机插秧技术逐步升级到毯苗机插。
3.2.2 毯苗机插
3.2.3 钵体毯苗机插
毯苗机插需要秧苗成毯才能机插,成毯过程耗费较长的时间。因此,中国对水稻毯苗机插方式进行改进,实现了钵毯苗机插,如图6所示。钵毯苗采用钵毯秧盘培育“下钵上毯”的秧苗,秧盘规格与毯苗秧盘规格相同。陈惠哲等[51]采用水稻钵形毯状秧盘和传统平盘培育秧苗,结果表明水稻钵形毯状秧盘与平盘育秧种子出苗率差异不显著,钵形毯状秧苗根系独立成钵状,56.03%的根系在底层钵碗内,上部根系比例43.97%。钵体毯苗的根系相对完整,钵苗移栽后能够迅速适应新的环境,成活率较高。但是钵苗的培育需要格外的钵体材料与人工成本。因此,范玉宝等[52]采用钵形毯状秧盘,培育具有“上毯下钵”形状的秧苗。该技术结合了钵形秧苗和毯状秧苗机插的特点和优点。

近几年中国通过引进技术和自主开发相结合,插秧机械化水平、插秧机技术研发和产品产销量得到了较大的发展。国内年销量超6万台规模以上插秧机制造企业已有数十家。但是目前中国的机插秧技术还存在着机械操作深度难以控制的问题。应通过调整机械参数,推广先进技术和经验等措施,降低自动化插秧过程的问题发生率,提高水稻机插秧的质量和效率。未来,应继续加大对水稻机插秧技术的研发和推广力度,为水稻生产的可持续发展提供有力支持。
3.3 精准变量施肥
目前水稻智慧无人农场变量施肥主要由信息感知、处方决策和精准作业三种关键技术组成。其中信息感知技术主要通过遥感技术与水稻营养诊断模型相结合的方式,对水稻长势信息进行监测和分析;处方决策技术主要结合水稻营养诊断结果和水稻生长发育的农学机理,构建水稻施肥决策模型,制定水稻施肥决策方案;精准作业技术主要依托施肥决策方案,采用农用无人机平台,对水稻进行变量施肥,进而实现水稻智慧无人农场变量施肥作业。
3.3.1 信息感知技术
由于氮素是影响水稻生长发育最重要的营养元素之一[54],国内外的相关研究主要围绕水稻氮素营养诊断进行。其中无人机遥感技术由于在获取水稻氮素营养信息上具有速度快、范围广、成本低等优点,成为水稻氮素营养诊断领域的常用技术[55]。因此,目前国内外学者主要通过无人机平台搭载可见光、多光谱、高光谱等传感器来实现对水稻冠层遥感信息的快速无损获取,并结合植被指数、机器学习等建模方法构建水稻氮素营养诊断模型。Wang等[56]融合多源遥感数据来构建多种指数,并结合机器学习方法构建水稻叶片和茎秆氮含量估计模型,结果表明,模型对氮含量的估计精度较高,叶片与茎秆氮含量估计结果分别为:R 2=0.8、RMSE=3.83 mg/g和R 2=0.7、RMSE=2.43 mg/g。Xu等[57]融合了无人机RGB与多光谱数据对水稻叶片氮含量进行估计,结果表明,高斯过程回归算法与最大相关最小冗余特征筛选方法相结合,对氮含量的估计效果最好,R 2为0.68,RMSE为11.45%。
由于目前的氮营养诊断模型在多品种、跨区域下的鲁棒性较差,复杂环境下的检测精度还需要进一步提升。因此,如何提高鲁棒性和精度是氮营养诊断模型亟待解决的问题。
3.3.2 处方决策技术
目前的水稻变量施肥处方决策技术主要在水稻长势信息诊断结果的基础上,结合水稻长势差异或作物生长过程,构建水稻施肥量决策模型,并以处方图的形式指导水稻变量施肥作业[58]。其中,臧英等[59]利用水稻无人机多光谱数据,通过分析水稻胁迫施氮水平的归一化植被指数(Normalized Difference Vegetation Index, NDVI)与标准施氮种植下的水稻NDVI指数差异,构建标准种植比值指数,并基于该指数进行变量施肥试验,结果显示试验种植区在产量与标准区接近的情况下,施肥量减少26.52%。Jin等[60]基于无人机可见光数据反演水稻叶面积指数(Leaf Area Index, LAI),利用数据同化方法对RiceGrow作物生长模型进行同化,并根据同化结果确定水稻施肥量。结果显示,四组不同底肥梯度的田块在变量施肥后总体产量接近一致,证明了变量施肥的可靠性。考虑到目前水稻变量施肥理论体系还不够成熟,目前的处方决策技术还需要更多地结合水稻生长发育的农学机理进行变量施肥决策。
3.3.3 精准作业技术
目前水稻无人农场变量施肥技术主要基于农用无人机平台进行。农用无人机平台基于无人机飞行路径规划与巡航、变量撒播等关键技术,根据施肥处方图实现水稻固液肥料的定量喷撒工作[61]。
其中无人机飞行路径规划技术主要基于施肥处方图,根据起飞位置、田块大小、作业时间、飞行高度等数据实现无人机自动飞行路径规划与飞行控制。无人机变量撒播技术通过集成变量撒播控制算法和撒播装置,基于处方图中的撒播作业参数实现在田块尺度下,固体和液体肥料的变量撒播作业。目前国内外学者已经开展了很多肥料变量撒播技术和撒播装置的相关研究。Su等[62]设计了一种适用于水稻大田作业的航空实时变量施肥控制系统。室内仿真与室外试验结果显示,整体撒播效果良好,撒播量的控制误差为7.30%,测速模块的监测误差小于30 r/min。
综上所述,精准变量施肥作业采用的三种关键技术在各自领域已经实现了小范围应用,华南农业大学[59]首先采用无人机获取水稻长势信息,然后根据水稻养分信息和施肥决策模型生成施肥处方图,再采用变量施肥无人机根据处方图执行施肥作业,大幅提高肥料利用率,为精准变量施肥技术的实际应用提供了重要的理论与数据支持。但目前将三种技术结合的无人农场案例仍然较少,今后应在补全各自部分不足的基础上,研究变量施肥全流程作业体系构建方法。
3.4 智慧灌溉
智慧灌溉系统综合利用自然降水与精准灌溉策略,实现基于水稻全生育期水分需求的自适应灌溉控制,以达到节水、节肥、省工和环保等目标。然而,传统农业节水技术设备在稻田灌溉复杂环境下存在稳定性差、成本高、智能化不足及生命周期短等问题,难以满足智能节水灌溉需求。信息技术与传统农业节水技术相融合,是水稻智慧无人农场实现节水灌溉目标的重要途径。
3.4.1 农田土壤水分含量高效感知
土壤水分是影响作物营养生长的关键因素,利用信息化手段感知土壤剖面水分含量、分布和动态变化,有利于田间土壤水分管理。
当前土壤水分管理借助微控制器及传感器等技术,实现了对土壤水分的实时监测与精准估算。但仍存在集成度低的问题,未来,应构建集成更多环境参数的综合农业气象站,为作物生长提供全方位数据支持。
3.4.2 水分需求精准诊断
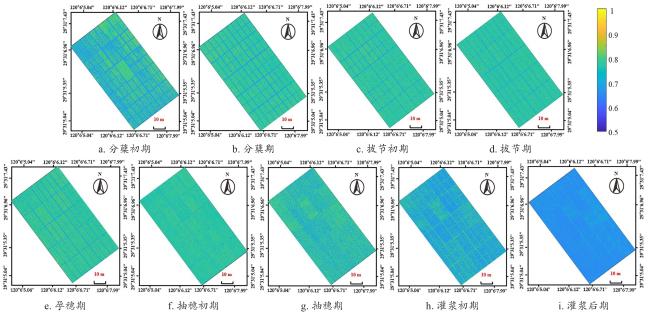
土壤水分仅仅反映了水分供应情况,并不能直接反映水稻的水分状况,精准诊断水稻水分需求可以准确反映水稻的生长状态,为制定灌溉决策提供了数据支撑。张雪楠等[66]在水稻抽穗-灌浆这一水分敏感期,通过获取光谱数据建立新型植被指数—归一化差值短红外指数(Normalized Difference Short Infrared Index, NDSII),结合叶绿素荧光参数,建立基于叶位组合的水稻冠层叶片含水量精准监测模型。Mndela等[67]通过无人机多光谱图像生成光谱植被指数以表征作物类型和含水量,通过线性回归方法构建田间实测相对含水量与植被指数间的关系,为小规模农场多季节不同作物制定灌溉计划。万亮等[68]通过无人机获取不同生育期水稻冠层的RGB图像和多光谱图像,通过提取植被指数和纹理特征,分析水稻的动态生长变化,构建水稻含水量预测模型,生成的水稻全生育期田间含水量分布情况(图7),填补了目前研究仅利用植被指数评估作物在单一生育期的生长参数而缺乏对作物含水量监测的空白。
综合利用土壤水分传感器、卫星遥感、无人机遥感等多源数据,深度融合人工智能和大数据技术,实现大面积农田的高效监测,是未来作物水分需求诊断模型的发展趋势。
3.4.3 高效灌溉控制技术
高效灌溉决策要求灌溉系统能够根据作物的实际需水情况进行精确灌溉,避免水资源的浪费和过度灌溉对土壤及环境造成的不良影响,是提高生产效率和降低劳动力成本的重要途径。
冯兆宇等[69]针对寒地水稻特殊的生长环境和作物各生育期不同需水量,设计基于灰色神经网络与模糊控制的寒地水稻灌溉模型,以预测作物灌水量和作物最佳灌水量的差值及差值变化率作为模糊控制器的输入,灌溉时间长度为输出,驱动电磁阀,实现适时适量灌溉,对提高水资源利用率有重要意义。李爱传等[70]针对寒地水稻种植区域地下水位下降严重,发展后劲不足的问题,设计适合于北方的寒地水稻节水灌溉控制平台,控制最远达2 800 m,数据信息传输正确率100%,抗干扰能力良好。为寒区地带对于水稻节水灌溉自动控制的需求提供了新的解决方案。高珍冉[71]通过构建稻田无线传感网无线信道损耗模型,集成土壤剖面水分、作物冠层水分、田间水位信息等稻田传感器的信息感知结果,并基于模糊神经网络开发智慧灌溉控制系统,其田间应用如图8所示。同时,中农智冠等公司融合多种技术,对农业生产中的自然环境数据进行实时分析并制定灌溉决策,进行自动化灌溉系统的控制,具有方便快捷、智能化程度高等特点。

综上所述,随着物联网、人工智能等技术的发展,智慧灌溉系统将通过实时监测土壤、气候和作物生长状况,自动调整灌溉策略,进一步提高灌溉效率和农业生产效益。
3.5 田间杂草管理
近年来,随着无人机技术的成熟和机器学习的快速发展,精准除草技术迎来了新的发展契机,逐渐受到广泛关注。在稻田环境中,杂草管理关键技术主要包括杂草识别与精准施药两个核心部分。
3.5.1 杂草识别技术
早期采用传统的数字图像处理技术,利用杂草的颜色特征、形状特征、纹理特征和多特征融合来实现对杂草的识别分类。随着大数据分析研究的深入和计算机硬件性能的不断提升,机器学习发展迅猛,并逐渐在杂草识别领域中得到应用。而近年来,深度学习依靠端到端学习、高层次特征提取和大规模数据驱动的优势,在目标检测领域迅速崛起,逐步成为主流的杂草识别方法。
目前,得益于深度学习的迅猛发展,田间杂草的识别精度不断提升,为精准除草技术奠定了坚实基础。然而,在杂草相互遮挡、目标较小等复杂场景下,识别准确率仍面临较大挑战。
3.5.2 精准施药技术
杂草快速准确检测是精准施药的先决条件,而变量作业是精准施药的核心目标。目前,精准施药的具体作业形式有对靶施药和可变速率施药两种方式。
对靶施药作业指的是根据作物田间杂草等目标的具体空间位置,对这些特定靶标实施精准定点施药的一种作业模式[74],示意图如图9所示。它的关键是先利用机器视觉、遥感等技术对田间杂草进行实时检测和定位,然后通过导航控制系统驱动施药装置,针对确定的杂草位置实施精准喷施,同时根据不同杂草的大小、密度等特性,对施药量和喷雾粒径进行相应调节[75]。Utstumo等[76]通过室内盆栽试验,验证了“按需滴落”系统可以有效控制杂草,在此基础上研制了一种基于机器视觉的除草机器人。该机器人通过机器视觉获取杂草信息,并对杂草进行分类,根据数量和种类进行按需施药。田间试验表明,相比于传统的施药方式,该除草机器人可以节省73%以上的农药量,有效减少了药物浪费。

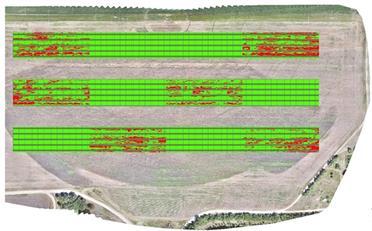
可变速率施药可以根据不同分区的施药量需求,通过精密控制系统对喷施装置的施药速率进行动态调节,实现农药的变量施用。稻田环境土壤湿软、地势低洼,无人机凭借灵活机动的特性适合在复杂稻田环境中进行可变速率施药作业。可变速率施药处方图如图10所示。Guo等[78]根据稻田杂草实际分布情况,生成变量施药处方图,利用大疆植保无人机根据变量施药处方图进行自动变量施药作业,并通过雾滴分析对植保无人机的变量施药效果进行评价,达到了精准施药的目标,与传统粗放式喷洒除草剂的方式相比,该方式节省了15.28%的除草剂。Huang等[79]利用全卷积网络对无人机采集的稻田遥感影像进行语义分割,根据分割结果生成整个田块的杂草分布图,将该分布图分割为多个作业网格,并根据预先设定的杂草阈值,将每个网格划分为施药区域和非施药区域,从而生成整个田块的精准施药处方图。
当前,精准除草的研究主要聚焦于利用地面机械进行靶向施药。在这一领域,中国的研究仍大多停留在实验室阶段,进展相对欧美国家较为滞后。与此同时,基于无人机的可变速率施药研究相对较少。此外,数据获取和处理、模型的泛化能力以及实时决策支持系统的构建等方面也存在诸多困难。
针对精准除草技术的发展,科研工作者应加强数据集建设与共享,收集不同作物和杂草的高质量数据,构建杂草数据库,以促进模型训练和验证的标准化,提升模型的泛化能力。除此之外,还需构建实时决策系统,帮助农民快速决策,并研究降低设备成本和技术应用门槛,以提高技术的可接受性和普及率。
3.6 田间病害诊断
病害是威胁水稻安全和高效生产的主要因素,遥感技术的发展为无损快速检测水稻病害提供了重要手段[81],不同的数据源可以提供丰富的不同时空尺度和分辨率的遥感信息,为病害检测提供更多样、更准确的数据支持。
3.6.1 基于高光谱的病害诊断技术
3.6.2 基于多光谱的病害诊断技术
3.6.3 基于可见光影像的病害诊断技术
从目前作物病害检测所使用的数据源来看,各类数据均存在一定局限性:可见光和多光谱数据的光谱维度不足,难以反映作物的内部生理变化;高光谱数据虽然包含丰富的光谱信息,但其存储和处理成本高昂;热红外数据容易受环境因素影响,且空间分辨率较低,无法准确捕获病害细节。因此,单一数据源已难以满足作物病害精准检测的需求。多源数据融合为解决这一问题提供了新的思路:通过结合可见光、光谱、热红外,以及三维结构等多维数据,不仅能够弥补单一数据源的不足,还能从多个角度全方位地表征病害特征,有效提升检测模型的性能和鲁棒性。这种融合策略使得病害检测系统能够更好地适应复杂多变的农田环境。
4 水稻产后智慧化关键技术
水稻产后环节的智慧化关键技术包括水稻估产技术、无人收割技术、粮食加工技术和品质检测技术。
4.1 水稻估产
在基于植被指数的估产方法研究方面,吴雨轮[91]提出一种基于归一化植被指数并结合气候修正因子的水稻估产模型。吴燕平等[92]基于水稻生育物候期内的多时相多光谱MODIS13Q1影像产品,建立增强植被指数(Enhanced Vegetation Index, EVI)与水稻年产量之间的多元统计回归模型,应用于年产量预估。田婷等[93]通过无人机搭载多光谱传感器,提取不同生育期8种植被指数与水稻产量的实测值建立水稻估产模型。Kanke等[94]使用基于红光和红边的植被指数对稻田产量进行预测,基于红边的植被指数可能比基于红光的植被指数更能准确地预测水稻产量。Zhou等[90]利用无人机搭载多光谱和数字传感器,通过单时相和多时相植被指数对水稻产量进行预测,多时相指数预测精度高于单时相预测精度,且与LAI相关性较高的植被指数对产量预测效果更优。
也有学者通过多特征融合的方法进行产量估计。王小攀等[95]利用“珠海一号”高光谱卫星遥感数据,计算并筛选出18个对产量敏感的建模因子,通过训练随机森林模型优化参数,实现对研究区域的水稻估产。张海珍等[96]以多时相的高光谱遥感数据建立水稻单产模型,计算研究区域年水稻总产量。Cao等[97]利用卫星植被指数、气象指数和土壤属性数据,并结合长短期记忆网络(Long Short-Term Memory, LSTM)、随机森林和最小绝对收缩和选择算子(Least Absolute Shrinkage and Selection Operator, LASSO)模型在谷歌地球引擎(Google Earth Engine, GEE)平台上进行水稻产量预测。Elders等[98]基于多时相的Sentinel-2遥感数据和随机森林模型预测研究区的水稻产量。Wan等[99]通过融合无人机图像中的光谱和结构信息对水稻全生长期进行监测,提取了植被指数、冠层高度和覆盖度等特征改进稻谷产量预测模型。
此外,也有学者利用数据同化方法结合作物生长模型实现对水稻的估产。陈劲松等[100]通过数据同化方法,将环境卫星HJ-1A/B数据提取的水稻叶面积指数信息与作物生长模型相结合,以提高水稻估产的精度。Yang等[101]将ORYZA2000模型与半经验后向散射模型结合,利用全局优化算法洗牌复形演化算法-亚利桑那大学(Shuffled Complex Evolution-University of Arizona, SCE-UA)对ORYZA2000模型进行优化,生成水稻产量分布图。Sun等[102]将两个热应激模型耦合到基于资源与环境综合的水稻作物模型(Crop Estimation through Resource and Environment Synthesis-rice, CERES-Rice)中,模拟水稻在开花和灌浆阶段的生长过程,改进后的模型相比原模型在水稻产量估算上更为准确。
综上,当前水稻估产研究尽管结合了多源数据和多种算法取得显著进展,但仍存在若干不足。首先,多源数据融合容易产生不同数据的时空分辨率不一致的问题;其次,气候变化对模型鲁棒性也有一定的影响;此外,还存在作物生长模型的参数优化复杂的问题。未来研究需要在数据融合、气候适应性、模型通用性与可解释性等方面继续探索,以提高水稻产量预测的精度和应用效果。
4.2 无人收割
将无人收割机应用到水稻收割的过程中,既能降低粮食的损耗,又能提高生产的效率[103]。目前,国内外水稻联合收割机主要包括全喂入与半喂入两种机型。
4.2.1 全喂入机型收割机

4.2.2 半喂入机型收割机
半喂入机型结构复杂,割台切割下来的作物仅穗头部进入脱粒滚筒脱粒。这种机型的含杂率相对较低,脱粒干净。Doungpueng等[107]收集了15台联合收割机的数据,生成了KDML-105(Kao Dawk Mali 105)变体的预测模型,使用12台联合收割机验证预测模型。结果表明,该模型的RMSE为0.24 m2/s。Liang等[108]在切向-纵向轴联合收割机上安装传感器,在华北地区进行了粮食分离损失监测试验,结果表明该监测方法可行,收割水稻时测量相对误差最大为4.63%。Hasan等[109]分别使用小型联合收割机和手动收割两种方式对不同地区的水稻进行收割,与手动收割方式相比,使用小型联合收割机成本节省了55.86%。
目前,智能化技术的应用使得无人收割机能够实现自主运行、智能识别作物的功能,极大地提高了农业生产效率和质量。然而在收割中有时需要多台机器协同作业以提高作业的效率,满足农事生产的需求。因此,合理分配各农机作业任务、协同各农机间任务的逻辑关系至关重要。河北农业大学等高校已开展相关研究。如李文鑫等[110]针对联合收割机与运粮车无法协同优化调度的问题,构建多机型多任务协同优化调度模型,为联合收割机与运粮车的协同调度问题提供了有效的解决方案。
从水稻无人收割机的企业发展来看,国际上水稻收割机中知名度较高的有久保田、约翰迪尔、雷沃谷神、江苏沃德等。其中,久保田凭借其高质量产品长期占据着中国水稻联合收割机市场的最大份额。而江苏沃德作为水稻联合收割机的领头羊企业,是久保田在水稻联合收割机市场中的主要竞争对象。就目前来看,中国水稻联合收割机市场格局已经趋向稳定,市场集中度较高。从收割技术的发展来看,无人收割技术仍存在着图像识别准确度不高,自动驾驶安全性不足等问题。未来可以通过加强传感器设备、引入碰撞避免算法、建立完善的紧急制动系统等方法改善这些问题,使无人收割机能够更好的为农业提供支持,实现农业生产的高效,精准和可持续发展。
4.3 稻谷储藏品质检测
稻谷储藏品质指标主要包括水分含量、脂肪酸含量、直链淀粉含量、淀粉酶活性、挥发性物质等。
综上,目前多种稻谷品质指标依赖不同的检测技术,集成难度较大。未来研究应着重开发便捷、经济的挥发性物质检测技术,并且集成多项检测指标,实现稻谷储藏品质的高效综合监控。
4.4 稻谷加工品质检测
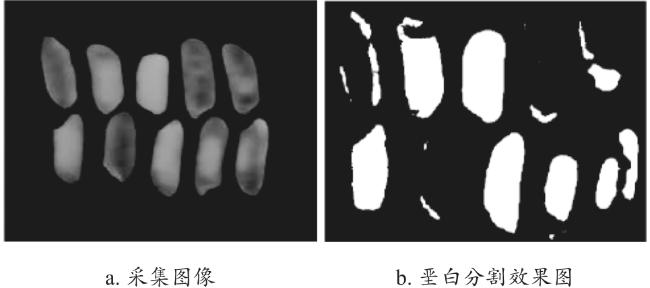
在稻谷加工过程中,机器视觉技术的应用逐渐增加,通过图像传感器获取物体图像信息,并将其转换为数字信号,以分析大米表面颜色、亮度等特征,可以客观、高效地检测加工精度、垩白度、碎米率等大米加工品质,从而提高生产效率,降低人为误差。万鹏等[117]利用机器视觉和反向传播神经网络(Back Propagation Neural Network,BPNN),通过颜色特征值检测大米加工精度,试验平均准确率为92.17%。陈昊然等[118]研究提出了一种基于图像显著性区域提取的垩白区域检测算法,用于提高大米垩白度检测的准确性,试验表明其检测准确率为96.76%。程科等[119]设计了一套基于机器视觉的大米外观品质参数在线检测系统,能够实时检测碾米机出料口的大米碎米率和留皮度,以在满足加工精度的同时控制碎米率。Prabira等[120]应用聚类算法精确区分并分割出大米中的垩白区域,分割效果如图13所示。中谷机械公司研发了大米外观品质测定仪,通过图像采集、图像处理技术可以检测大米质量指标中的整精米率、垩白粒率、垩白度等指标。
综上,机器视觉技术在稻谷加工品质检测中虽取得了一定成效,但仍存在不足之处。首先,检测精度易受光照、灰尘、设备震动等环境因素影响,导致检测结果不够稳定;其次,由于不同品种和加工批次的大米在颜色、形状等方面存在差异,现有模型的泛化能力还不足。未来研究可结合深度学习与多模态融合技术,提升机器视觉系统对大米外观特征的识别能力及适应性。
5 智慧稻作:现代科技驱动的无人农场
近年来,世界各地积极探索水稻智慧无人农场的建设,以提升农业生产效率、降低人工成本,推动农业现代化。本文总结了国内外水稻智慧无人农场的应用案例,如表1所示。
表1 水稻智慧无人农场应用案例Table 1 Rice smart unmanned farm application cases |
| 地理位置 | 建设单位 | 主要技术与优势 | 年份 |
|---|---|---|---|
| 黑龙江省 | 北大荒集团 | 自主作业、远程控制,农机年作业面积达22.5万hm2[121] | 2018 |
| 日本宫城县 | 久保田公司 | KSAS系统,稻田40 hm2,仅需9名管理人员[122] | 2021 |
| 广东广州市 | 华南农业大学 | 全程无人化耕作,每公顷产9 934.36 kg,增产32%[12] | 2022 |
| 上海市 | 上海市政府 | 物联网、全阶段无人化,农机远程控制[123] | 2022 |
| 北京海淀区 | 海淀区政府 | 物联网+智能农机,管理仅需1人,增产3 000~3 750kg/hm2[124] | 2022 |
| 广东佛山 | 中国科学院智慧农业研究院 | 北斗导航无人耕种,增产3 000~4 500 kg/hm2[125] | 2023 |
| 四川成都 | 成都当地政府 | 5G+物联网全程无人化,增产750 kg/hm2[126] | 2024 |
| 广西贵港市 | 当地政府 | 全程无人化,节约成本3 750~4 500元/hm2[127] | 2023 |
| 贵州剑河县 | 当地政府 | 北斗导航精确插秧,增产10%~20%[128] | 2024 |
| 湖南益阳 | 华中农业大学 | 智能决策平台,再生稻每公顷产最高达17 988 kg[11] | 2024 |
| 安徽芜湖 | 中国科学院计算所 | 智能农业系统,节本增效1 620元/hm2[129] | 2024 |
| 湖北武汉 | 武汉当地企业 | 智慧管理,水肥一体化,每公顷产约12 000 kg[130] | 2024 |
| 江苏南通 | 南通当地政府 | 数字化管理,全年仅需10名管理人员[131] | 2024 |
上海市以万亩良田2023年8—10月水稻长势监测为例,长势图由红、绿、蓝、近红外、红边5个波段合成,3.5万张单张覆盖面积约0.8 hm2的影像拼接而成,并将辅以人工智能计算,实现精准施肥,预计可为每公顷地节肥3.45 kg[134]。
与此同时,无人农场管理平台作为智慧农业的关键技术支撑,主要包括农场综合监测管理云平台和农机智能化管理云平台等模块。其中,农场综合监测管理云平台通过整合多种传感器设备、遥感技术和实时数据传输,实现对农田环境的全面监测与动态管理。平台能够实时采集并分析土壤湿度、气象条件、作物生长状态等关键数据,结合智能算法提供精准的农业生产建议。通过多维度的数据融合与可视化展示,平台帮助农场管理者实时掌握农田全局状况,提前预警可能的异常问题,优化农事操作流程,从而提高资源利用效率、降低运营成本,并显著提升农产品质量和产量。农机智能化管理云平台能够通过远程监控、精准导航、自动作业和实时数据分析,实现对多种农机设备的智能调度与协同作业,并通过融合高精度卫星定位、传感器网络和智能算法,动态监测农田环境和作业状态,优化作业路径,从而减少资源浪费、提高生产效益。目前,多个高校和企业已成功构建无人农场管理平台,例如碧桂园集团研发的数字农业(智慧农业)系统与智控管理云平台可以实现对农机的远程操控[135],真正实现无人化作业。中国农科院华东中心[136]构建了智能农事作业平台以及智慧大田指挥决策中心平台,实现了各平台模块系统协同配合,与农业管理深度融合。这些云平台为智慧农业提供了高效、精准的管理支持。
安全性是无人农机作业过程中一个重要问题。无人农机不仅要注重多机协同导航中路径规划问题,还需要可靠地识别和避开工作区域中的障碍物,以防止发生事故。对于全局路径规划及路径冲突等问题,需要结合实际农田道路状况进行分析,并构建路径冲突检测算法。对于障碍物检测问题,尽管目前已有一些障碍物检测算法,但由于农田的复杂性和非结构性,在农业环境中进行障碍物检测仍具有挑战性。综上,强大的安全系统对无人农机作业至关重要。未来应构建更全面的农业环境数据集,例如,涵盖树桩、石块、田埂、杂草丛、生长中的作物、灌溉设施、动物以及移动的农用车辆等各种可能的障碍物类型及其特性。结合具体农机作业场景开展农田试验,对路径规划算法性能进行测试并进一步优化,完善无人农机作业安全体系。
国内外水稻智慧无人农场大多已经实现了产前、产中、产后环节的全程无人化,依托智能农机、数字化感知、智能决策、精准作业和智慧管理等核心技术,提高了生产效率和管理水平,减少了人力需求,降低了劳动力成本,提高了经济效益。水稻智慧无人农场能够及时采集和分析农作物的生长数据,以优化管理决策,以其技术上的优势,提高了水稻产量。目前中国水稻智慧无人农场的数量不断增加,分布在广东、四川、江苏等多个省份。地方政府和科研机构积极支持无人农场的建设,通过政策引导和资金支持促进其发展。然而,不同地区在技术应用、农场规模和管理模式上仍存在差异。
6 水稻智慧无人农场发展建议
6.1 政府的角色与职责
政府是水稻智慧无人农场的统筹规划者和政策推动者。为了让政府能够更好地发挥自身的作用,建议政府出台包括智慧无人农场税收减免、资金补贴和低息贷款等优惠政策,降低无人农场建设和运营成本;带头组织制定技术接口规范、数据隐私保护标准,构建智能设备的质量认证体系;通过与教育部门协作,支持高校和职业院校设立智慧农业相关专业,推动人才供给与市场需求的精准对接。
6.2 企业的角色与职责
企业是水稻智慧无人农场的技术开发者、产品提供者和市场应用者。为了让企业能够更好发挥自身的作用,建议企业结合农场实际需求,联合高校与科研机构,研发高效、稳定且适应性强的智能农机设备、物联网传感器和管理系统,并提供持续的技术支持与升级服务;通过开展示范项目、举办农机操作培训和农业技术讲座,提升合作社对智慧农场技术的接受度与使用能力;根据政府需求开发和部署数据加密技术、访问权限控制系统,确保智慧农场运行中的数据安全,并提供快速响应的运维服务。
6.3 科研机构的角色与职责
科研机构是水稻智慧无人农场的理论探索者和技术开拓者。为了让科研机构能够更好发挥自身的作用,建议科研机构聚焦智慧无人农场关键技术的前沿探索,突破技术瓶颈,为产业发展提供技术储备;与企业合作,制定统一的技术标准,开发适配性强的系统接口,促进新旧系统的平滑过渡和模块化发展;根据不同稻区的地形、气候和种植模式特点,研发差异化的智能化解决方案,提升技术落地的适应性和效率。
6.4 合作社的角色与职责
合作社是水稻智慧无人农场的产品应用者和需求反馈者。为了让合作社能够更好地发挥自身的作用,建议合作社明确生产需求,参与技术试点与应用反馈,帮助企业和科研机构优化技术设计与产品性能;根据自身条件和发展规划,选择适合的小规模试点或共享设备模式,并逐步推进智能化改造;联合其他合作社,分享智慧农业经验,形成区域性技术推广网络,加快智慧无人农场普及。
总的来看,目前水稻智慧无人农场的发展处在挑战与机遇并存的时期,要实现水稻智慧无人农场的规模化和高质量发展,必须依靠多方协作,各主体明确自身角色、发挥各自优势,共同推进这一领域的技术革新与应用落地。通过各主体的协同努力,水稻智慧无人农场的发展将进一步突破瓶颈,向更高效、更智能、更普惠的方向迈进,为中国农业现代化和粮食安全提供坚实支撑。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}