



0 引 言
2024和2025年的《政府工作报告》及《通用航空装备创新应用实施方案(2024—2030年)》已将低空经济作为培育的万亿级战略性新兴产业,标志着低空空域改革和产业体系建设进入加速推进阶段。同时,《加快建设农业强国规划(2024—2035年)》《乡村全面振兴规划(2024—2027年)》和《中共中央 国务院关于进一步深化农村改革 扎实推进乡村全面振兴的意见》等明确提出加快发展农业新质生产力和推进乡村全面振兴。在此背景下,低空技术正加速融入农业农村现代化进程,将逐步成为农业和科技双轮驱动、农业全产业链升级的重要引擎。
当前农业领域低空技术与装备以中小型无人飞行平台为核心,搭载多源感知和任务载荷,已广泛应用于农情监测、病虫害防控、施药施肥和农产品短途运输等场景,成为农业生产的重要“空中生产力工具”。特别是在果园等复杂地形区域,传统管理方式在人力成本、作业效率和环境适应性方面存在明显短板,对高机动性、精准化、智能化的空中作业解决方案提出了迫切需求。“低空+果园”的深度融合为果园经济的绿色可持续发展提供了新路径,也对飞行器本体设计、任务智能协同、空域适应性等方面提出更高要求。伴随低空作业场景的拓展,《中华人民共和国民用航空法》《无人驾驶航空器飞行管理暂行条例》(2023年)明确了无人驾驶航空器的空域使用、飞行活动管理、监管责任等内容,现行空域精细化管理与法律法规体系正在为构建契合果园低空经济特征的标准化运营与监管机制提供制度支撑,进而为果园等典型场景的高质量发展提供保障。
本文系统梳理果园低空经济“上游—中游—下游”产业链组成,详细总结上游产业(装备制造与基础设施建设)和下游产业(衍生服务)的发展现状,进一步围绕果园生产环节(中游产业),重点综述产前、产中、产后的关键技术及应用情况,最终提出果园低空经济的发展思考,为智慧农业与低空经济交叉领域提供一种全链条分析框架。
1 果园低空经济的产业生态链


1.1 上游装备制造产业
果园低空经济上游环节主要包括机械设备制造、电子元器件及原材料供应、关键子系统研发、整机总装与适配集成,以及低空通信、低空导航等基础设施建设,各方面相互协同,共同构建果园低空作业高效运行的装备支撑体系。
1.1.1 机械结构、电子元器件、原材料制造
果园立地条件复杂多变,要求飞行平台在潮湿、腐蚀、高落差的环境中保持耐久安全,对结构强度与机动性能提出更高要求。当前,产业已初步形成以碳纤维复合材料与高强度铝合金为核心的轻量化结构体系。一些主流植保无人机已实现保证强度的同时将空机质量控制在50 kg以下。国内如光威复材、安泰复材等企业已具备航空级碳纤维批量供应能力;中国铝业、航材股份等提供高性能金属材料,保障结构耐久性与可靠性;大疆创新(DJI)、T-Motor等龙头企业则在高效无刷电机方面形成成熟的产品体系,适应果园密植、崎岖环境下的高频高载作业需求。国际上,日本东丽(Toray)和比利时索尔维(Solvay)提供先进航空复合材料,美国赫氏(Hexcel)[11]整体供应链已具备面向航天工业批量定制与一般商用规模化制造的双向适应能力。上述企业的元器件、原材料等产品,已广泛用于包括飞行平台在内的装备制造,为果园低空经济的上游发展提供可选条件。
随着果园低空装备在多样化作业场景中的持续应用,涌现出对兼具轻质、高模量、抗腐蚀和热管理功能的结构-功能一体化新型材料的技术需求,并引入仿生结构与柔性设计,增强低空作业平台在复杂林冠环境中的适应性与安全性。在电子元器件制造方面,已开始部署具备边缘计算能力的嵌入式AI芯片[12, 13],集成高精度惯性测量单元(Inertial Measurement Unit, IMU)、视觉雷达融合导航模组与自感知控制单元,实现果园飞行器的高自主化飞行、障碍识别与任务决策;对于动力系统,注重提升电机效率与电池能量密度[14],并探索热控技术与能量储存系统的融合[15],为低功耗、高负载、长航时、多任务协同作业提供核心硬件支撑。
1.1.2 关键子系统研发
为实现果园低空作业平台的高效、安全与智能化运行,其核心依赖于多个关键子系统的协同支撑,以下将从动力系统、飞控系统、导航感知系统等方面,系统分析当前应用现状与发展趋势。
(1)飞行器动力系统。果园作业环境复杂多变,飞行工况离散性强,对动力系统提出了更高续航、更强载重、更高环境适应性与更低运营成本的技术需求。当前果园低空飞行平台以无人机为代表,主要多依靠高能量密度蓄电池为动力来源,配合多轴无刷电机,实现垂直起降、定点悬停与低空机动飞行。电动系统具有结构简单、控制精准、维护便捷的优势,适用于果园复杂地形及多任务作业,但续航时间尚不满足长航时、大载荷或旅游观光等新兴应用场景的需求,难以满足果园中长时间、高频率、多任务连续作业的需求,尤其在大面积果园或丘陵山区表现尤为突出。为提升果园低空飞行平台作业效能,上游厂商正致力于探索高效电机、高比能电池、油电混合动力等技术方案。例如,国内油电混合系统已在部分电动垂直起降飞行器(Electric Vertical Take-off and Landing, eVTOL)上试飞成功,通过发动机与蓄电池协同供能,显著提升续航与持续作业能力,适应果园长距离航线与高频次任务需求;大疆推出的T60植保无人机搭载共轴双旋翼动力系统,作业载荷达60 kg,有效提升喷施效率,可适应果园密集树冠下的大剂量施药作业;宁德时代推出的高能量密度固态电池[16, 17]可增加植保无人机的单次作业面积与作业半径,减少果园作业中频繁电池更换带来的效率损耗。日本松下正推进固态电池在无人机领域的应用,有望提升果园作业的能源安全性与环境适应性[18]。
现阶段,油电混合动力系统正加速迭代优化,使发动机-蓄电池在不同任务负载下协同工作[19],实现动力系统模块化设计和智能能量管理,保障果园低空飞行平台的高质量稳步发展。
(2)机载感知系统。机载感知系统是果园低空平台实现自主飞行与精细作业的“感官”,目前由基础避障功能向多模态融合感知与环境建图方向演进。针对果园植被密集、地形起伏、障碍物不规则分布等复杂特征,飞行平台普遍搭载激光雷达(Light Detection and Ranging, LiDAR)、毫米波雷达、超声波测距仪、高清可见光与多光谱相机等感知设备,并融合IMU、全球导航卫星系统(Global Navigation Satellite System, GNSS)和实时动态差分(Real-time Kinematic, RTK)模块,实现对空间结构、作业对象的实时感知与动态反馈。例如,大疆为应对不同种类果园树木高低起伏和障碍物多的特点,研发了“果树模式4.0”飞行软件,可基于三维航测地图自动规划绕树航线,并在遥控端直接编辑飞行航线。
(3)飞控系统。飞控系统作为果园低空飞行平台的“大脑”,是高效精准执行复杂作业任务的核心设备,通常由姿态解算单元、导航定位单元、控制计算机和操作系统等软硬件组成,通过飞控系统、感知系统与作业单元的协同控制,使用嵌入飞控算法的软件操作系统,实现实时飞行状态估算、路径规划与任务管理等功能。果园地形起伏大、林冠密集、空间狭窄,飞控系统需具备精准导航、抗干扰能力强、自主避障等特性,以保障作业安全与作业精度。例如,大疆推出了面向农业场景的飞控和导航套件,其A3-AG/N3-AG农业飞控系统集成了双天线RTK高精度定位、惯性导航和避障雷达,并配套大疆农业App与管理平台,形成从机载到云端的完整解决方案,支持果园作业任务的远程调度与数据回传,提高果园喷施、巡检等作业效率;极飞科技开发的自主飞控系统,支持无人机在果园中按照预设航线喷洒农药或巡检果树,通过集成IMU和全球定位系统(Global Positioning System, GPS)模块,能够实现厘米级的定位精度,确保农药喷洒均匀且不重不漏,适用于密植果树和不规则林带布局。此外,相关企业也致力于飞控系统可靠性研发,提高飞行平台在复杂环境下的安全裕度,很多机型采用双余度IMU[24]和多传感器融合设计[25],在主控器失效时可平滑切换,降低因瞬时失控造成植保无人机撞树、坠落等风险,显著提升果园高密度环境下的作业安全性。
(4)机载通信系统。果园低空作业平台的通信系统负责保障无人机与地面控制端及作业环境的信息交互,通常需要融合导航定位信息,由于果园地形起伏大、林木遮挡密集,通信信号易受干扰,通信系统需具备抗遮挡能力强、时延低、带宽高与连接稳定等性能特征,目前主要依赖数字微波电台、4G/5G蜂窝通信等方式,实现果园作业过程中的遥测数据回传、任务指令下发、协同作业控制等功能。近年来,5G-A(5G-Advanced)等超低时延的蜂窝通信技术已在农业场景中试点应用,便于远程监控多台低空飞行装备。例如,华为依托其5G技术推出了智慧农业物联网方案[30],通过在果园部署蜂窝网络和云平台,确保无人机等设备的高速联网与数据上传。国际上,Trimble[31]公司研制的BD9250双频多卫星接收机,具备体积小、精度高等特点,适用于农业无人机自主飞行;Topcon公司研发的Falcon 8+无人机系统采用了多重通信冗余设计,满足高精度测绘和农业监测等领域的高可靠性通信需求。
当前通信系统在带宽、时延、抗干扰能力,以及云端平台对接方面仍存在不足,影响果园高密度作业场景下的稳定性与效率。机载通信系统正朝着低空组网通信架构、超低时延与高可靠无线通信协议,以及云边端一体化数据传输与协同控制机制等方向演进,为果园低空飞行平台作业提供稳定、高效的数据链路支撑。
1.1.3 整机总装产业
整机总装集成产业作为连接上游零部件制造与下游应用场景的核心环节,正通过使用轻量化材料和结构优化来降低空重、提升载比,搭载高能量密度动力系统与热管理系统延长续航时间,集成软硬件协同系统支撑多任务一体化作业,配备标准化挂载接口实现不同作业任务快速切换。随着施肥施药、产量监测、果实采摘等多样化任务需求不断增长,果园低空飞行器的整机总装正从传统单一机型生产转向“模块化集成+场景定制”的柔性制造模式,在标准机型基础上,针对果园场景做定制适配,如加强防水防尘能力以应对果园潮湿泥泞环境,优化机臂折叠方式以便山地果园转场运输,调整喷洒系统喷嘴角度和下压风场以提高作业效率。
大疆、极飞科技系列无人机集成了多任务标准化模块与统一接口,具备快速拼装与任务切换能力,大疆农业发布的《农业无人机行业白皮书(2023)》展示了无人机广泛应用于播种、施肥、喷药、测绘及农产品运输等多种作业场景;极目企业在无人机上集成双目视觉模块和变量喷洒装置,可在果树间超低空自主穿行,实现精准的药剂覆盖[32]。国际上,美国Guardian Agriculture公司研发的SC1系列无人机通过高精度导航与配药系统的一体化集成,实现整机在农业施药任务中的高效承载与精准作业能力[33];日本雅马哈R-MAX无人机通过整机总装阶段的风场优化与喷洒系统调校,实现在果园植保中的稳定飞行与高穿透力药剂喷洒[34]。
1.2 低空基础设施
低空基础设施是果园低空经济规模化应用的前提。地处郊外的果园通常缺乏固定电源和通信网络,着力构建便携、自治的支撑系统,完善果园低空飞行器起降、充电、控制、通信等设施,是果园低空经济产业发展的驱动力。
1.2.1 专用物理基础设施
低空物理基础设施是支撑低空经济运行的核心基础,涵盖飞行器的起降、停放、充电、维护、调度、通信与空域管理等环节,用于构建“空中走廊”与“地面节点”的立体运行体系。
在起降平台建设方面,丘陵山地分散的果园作业场景要求构建轻量化起降平台,集成GNSS/RTK参考基站、防尘防水外壳与视觉引导灯标,可在林冠遮蔽环境中保障厘米级自主起降,逐步形成“分布式无人机港”,为果园作业提供集起降、停放和调度于一体的作业体系。
在维护保障设施建设方面,果园作业的高频率、多机化趋势对设备维保提出更高要求。目前相关企业正引入“车载移动维修单元+区域集中保障中心”二级维保体系。其中,车载移动维修利用折叠式工位、便携超声检测仪完成现场故障快修;区域保障中心承担电机、雷达等高价值部件的周期性诊断与翻新。物理基础设施建设正逐步迈向无人值守、全域覆盖、智能协同的新阶段,推动果园低空经济从“点状作业”向“系统运营”转型升级。
1.2.2 信息基础设施
信息基础设施是果园低空飞行器空地互联的数据传输与存储底座,主要包括低空网络设施和低空数据与调度平台。
为克服丘陵地形与林冠多径干扰,低空网络设施建设与运营商已在主要水果产区布设4G/5G-空对地通信(Air To Ground, ATG)微基站,以及北斗地基增强与RTK参考站,形成宽带链路和厘米级定位双层网络,为果园低空飞行器进行高清图传和远程任务下达提供了稳定支撑。新部署的通感一体基站兼具气象、空域监视与通信功能,实现一站式数据采集与服务。例如,北京“未来果园”平台融合了华为和中国移动的通信技术,在园区内实现了千兆网络和定位联动,大幅提升了无人机与物联网设备的数据交互效率;福建福州建成低空测试示范场,部署基于5G-A通感基站的调度系统,建设“通、导、气、监”一体化的全域全空间低空智联网,建设“云、数、智、算”融合的低空智算网络体系。
低空数据与调度平台是衔接低空飞行器作业与果园管理的数字中枢,通过“云-边协同”的数字孪生架构,将无人机影像、物联网传感数据和气象数据等多源异构数据汇入统一的果园级数据湖,嵌入时空栅格数据模型实现虫情预警、产量估算与航迹冲突解算。例如,民航局无人机云交换系统、中科天网等平台,以及美国AirMap公司的无人驾驶航空交通管理系统和U-Space的技术解决方案,实现飞行日志归档、空域冲突实时解算和群机动态调度,奠定果园低空作业“连得上、算得快、管得住”的数字技术基础。
综上,果园中的低空经济产业链上游从材料供应、核心零部件制造到子系统研发、整机集成,再到配套基础设施建设,各环节相互协同,为果园低空经济提供了坚实的技术基底。国内外的研究与实际应用表明,低空装备正帮助传统果园向精准、高效的方向转型。尽管目前某些先进装备尚未大规模应用于果园,但在其他领域的成功经验为未来落地提供了借鉴。可以预见,随着关键技术突破与供应链协同能力的持续增强,上游环节将不断迭代升级,催生更完整、更高效的果园低空作业解决方案,进而驱动果园低空经济迈入高质量发展的新阶段。
1.3 低空产业链下游
低空经济在果园的规模化落地正在从装备就绪转向服务驱动,并围绕服务保障体系、装备租赁、果旅融合构建起多端互惠的“服务-对象”网络(图3),形成人、机、险、空、旅协同的新消费生态,为低空技术在果园全价值链渗透奠定终端市场基础。

1.3.1 低空保障服务产业
果园低空经济要从“示范应用”走向“规模化运营”,不仅依靠飞行器硬件与智能算法,更需构建“人、机、险、空、旅”全流程保障体系。飞手培训、保险服务、维修维护与空域管理共同构成了这一体系的基础,以降低作业风险和使用门槛,提升设备出勤率与监管可视化水平,帮助果园业主、合作社和服务商将无人机、电动垂直起降飞行器等低空装备纳入日常生产和运营体系。
在飞手培训方面,针对果园多地形、多任务、精细化管理的作业需求,飞行器操作人员需掌握高精度操控、障碍规避与作业参数设置等复合技能。中国民航局在2013年初步建立的无人机驾驶员培训体系与管理制度基础上,正式颁布《民用无人机驾驶员管理规定》(2018年)和《无人驾驶航空器飞行管理暂行条例》(2023年),对低空飞行器驾驶人员的从业资质、培训、法律许可等方面进行了详细规定。当前,培训机构依据法律法规,提供理论学习、实操练习等课程教学。国内如大疆创新的慧飞培训中心为操作者提供专业课程,教授无人机操控和果园作业技巧,涵盖果树喷洒航线规划、山地起降技巧等内容[43];全球鹰无人机飞行学院、知飞航空科技等多家培训机构正致力于相关培训服务[44];澳大利亚Aviation Australia[45]、美国UAV Coach[46]等公司从事农业与测绘无人机使用、驾驶员培训等,为果园低空经济发展提供人才支撑。
保险服务主要针对果园复杂作业环境中低空飞行器驾驶的潜在风险问题,重点针对可能发生的坠机、碰撞等事故造成的经济损失与人身伤害。保险种类包括机体换新或维修(对飞机本身的维修进行赔付)、第三方责任险(对无人机坠毁造成的人员伤亡、撞毁其他车辆或建筑物等进行赔付)等。国际上,德国安联(Allianz Global Corporate & Specialty, AGCS)在商用无人机兴起初期即设立航拍和农业专属条款,覆盖飞手责任、设备损毁及第三方损害,为欧美国家定制了批量保单方案[47];国内的大疆Care服务与第三方责任险服务,为果园无人机提供撞机或进水后的免费维修保障,以及对第三者人身和财产损害的赔付,降低了果农的使用风险和经济压力,有利于低空装备在果园中的普及推广。
果园作业季节性强、作业窗口有限,维修保障服务重点针对果园低空飞行平台作业时效性要求下的快速维修再使用问题。例如,大疆的农业植保无人机支持线下维修及不同种类的无人机保养方案,且服务网点覆盖大部分地区,相对于其他非农业产品维修周期较长的线上寄修,线下网点模式可实现快速维修,依据飞行时长或激活时长提供保养计划推荐服务,保障果园无人机能够高效、安全、长时间作业。
在低空空域管理方面,监管部门可通过管理平台实时掌握飞行轨迹与喷洒数据,既保障公共安全,也为农药合规、环境监测等提供执法依据,营造良性生态。目前,空域管理体制改革进程加快,为果园低空作业释放更多政策红利。北京市多家政府部门鼓励企业开发低空智联网和空域管控服务系统,构建通感一体、空天地协同的技术支撑能力,提供同空域多机种融合飞行、低空通信导航监视、空域精细划设及全空间协同管理等技术支持和解决方案。欧盟的“U-space”框架已于2024年正式生效,多国部署U-space Service Providers,在意大利坎帕尼亚葡萄园,无人机植保公司通过U-space授权实现自动起降、空域冲突实时解算,提高作业窗口利用率[48];美国联邦航空管理局(Federal Aviation Administration, FAA)通过无人机系统数据交换与无人机系统,果园运营方可在线提交申请,获取视距内飞行作业许可,飞行系统与农药管理部门共享数据,确保喷洒合规。
低空安全防控是果园无人机监测、精准植保、空中物流和农旅观光等场景“飞得起、飞得稳、飞得久”的“最后一道基建”。随着低空飞行活动日益频繁,低空安防产业正进入技术融合创新与市场加速启动的快速发展机遇期。国内如大疆在2024年升级了地理围栏系统(Geo-fencing),可应用在植保无人机上,使其自动避开机场、电力线、国防设施等禁飞区域;北京市将推动光电对抗、信息干扰与数据链干扰等无人机反制技术攻关,利用AI与大数据打造低空风险预测和应急处置大模型。此外,政府空域精细化管理政策,如中国民用航空局《民用航空低空空域监视技术应用指导意见》、澳大利亚民航安全局的操作要求等,使低空飞行器拥有清晰的合规航线,也为监管部门保留实时干预和事后溯源依据。总体上,企业的创新驱动与政策的支持为果园低空经济搭建起多层安全屏障。这些举措不仅降低了坠机、误喷、空域冲突等直接风险,也增强了公众与监管部门对于低空飞行器大规模进入果园生产、物流与观光场景的信任度。
1.3.2 果园低空装备租赁
随着以无人机为代表的低空飞行器市场规模不断扩大,低空装备租赁行业发展空间广阔,由于契合农业“共享经济”和“服务下乡”的趋势,正成为融资租赁行业的新蓝海,特别是对于收入较低的果农及规模化果园生产,采用长期租赁或订阅制服务模式,根据作业量按季或按年计费,更具吸引力和性价比。此外,在政策鼓励下,低空飞行器销售商逐渐与金融机构合作推出“以租代购”方案,扩大设备在果园领域的覆盖,显著降低技术门槛,保持装备的持续迭代。
中国是农业无人机租赁发展较快的国家之一。近几年出现了专门的平台和运营商,为农户提供无人机租赁服务。例如,科比特“云享飞”平台支持线上下单、就近调机,大型果园可包年订阅整机队列,按作业量结算;金融租赁公司与主机厂合作推出融资租赁模式,替代一次性采购。国际上,印度Garuda Aerospace、英国Heliguy等企业提供设备租赁、飞手、技术一体化外包服务。
总体而言,低空装备租赁正在全球范围内成为农业领域一种常见且成熟的运营模式,其市场需求正从传统的果园植保扩展到果园生产的各个环节,便于关键农时短期获取先进设备完成作业任务,成为果园不可或缺的弹性生产要素。
1.3.3 “低空+果旅”融合
随着通用航空与传统旅游的深度融合,低空旅游作为一种新兴的旅游形式应运而生。该模式主要依托直升机、热气球、滑翔伞、飞艇,以及eVTOL等低空飞行器,为游客提供独特的空中视角和沉浸式飞行体验。果园作为农业、生态与文化资源的复合载体[49],天然具备发展低空旅游的独特优势。一方面,果园具有良好的空间尺度和自然景观,为低空飞行提供了理想空域;另一方面,果园也承载了丰富的文化与农业体验内容,为低空旅游注入了多元化的场景体验。
目前,在海南三亚已有游客可通过直升机前往稻田果园开展空中观光,在广西阳朔则可乘热气球俯瞰果林景观;在美国,部分果园在丰收节期间引入短程直升机游览项目,将农业景观打造成具象化的旅游资源,实现从“种果”向“观果、游果”的跃迁。尽管当前果园低空旅游尚处于起步阶段,运营规模与商业模式仍待探索,但随着低空空域逐步开放、监管体系日趋成熟,未来果园有望成为低空旅游的新兴场景。
此外,各国政府正不断推进低空空域管理改革。中国在政策扶持和空域下放方面已逐渐取得成效,欧美国家亦在优化超低空飞行的审批与监管流程,为常态化、市场化的低空果园游览创造法律基础与市场空间,由此可衍生一站式果园低空旅游服务商,可打包提供飞行器租赁、飞手派遣、保险与安全管理。此外,果园可通过开展空中采摘节、空中果园摄影展、果旅研学等新型项目,构建空中体验和地面消费的联动体系,延长产业链条、提升综合效益。在果旅融合的背景下,“以果为媒、以旅兴果”将实现果业与低空旅游业的良性互动,果园低空旅游有望成为推动地方农业经济转型、拉动低空产业链协同发展的新引擎。
2 低空技术在果园生产环节的应用和技术现状

2.1 产前环节低空调研和精细规划
低空技术在果园产前环节应用主要体现在土壤肥力检测、田块面积测量和地形条件评估等方面。利用搭载高精度测量和影像技术的低空飞行平台,获取田块墒情、面积、位置分布和地形条件等数据,优化灌溉与施肥方案,准确规划耕作区与排水系统,对实现果园精准管理、土地利用规划具有重要作用。
(1)土壤肥力检测。快速、高效、准确地获取土壤墒情、有机质和全氮量等土壤肥力条件已成为精准农业管理的重要内容之一。目前依托搭载多源传感器的无人机进行土壤属性检测,构建土壤肥力估算模型。如宋奇等[26]利用无人机遥感技术与分布式梯度增强(eXtreme Gradient Boosting, XGBoost)模型结合,可有效估算土壤质地,其性能明显优于卫星数据。彭涛等[58]使用搭载高光谱传感器的无人机获取土壤影像,构建了高精度土壤全氮含量反演模型。Ottoy等[59]利用无人机对葡萄园、桃园、猕猴桃园衍生的光谱数据进行了土壤有机碳估算。Jiang等[60]在渭库绿洲地区实验表明,使用无人机获取的合成孔径雷达、微波与多光谱遥感数据可高效反演土壤盐度,均方根误差(Root Mean Square Error, RMSE)为2.653。Liu等[61]利用无人机高光谱相机及反向传播(Back Propagation, BP)神经网络估算模型,可精确获取土壤有机质、氮含量、有效磷钾等养分信息。
(2)田地面积测量。为解决传统人工面积测量效率低、误差大的问题,通过无人机和遥感技术可快速、准确地获取农业地块的面积与边界数据。如金磊等[62]使用无人机对4户烟农农田进行测绘,获得矢量化影像数据,提取面积、垄长等参数信息,田块面积测量精准率达99%。李伟等[63]使用搭载可见光相机的无人机来获取航拍影像数据,采用改进的基于区域的卷积神经网络(Mask Region-based Convolutional Neural Network, Mask RCNN)分割算法,建立了一种快速面积测量和边界勾画的方法,平均总体精度为95.31%。齐涛等[64]在梯田面积测量中采用单镜头无人机贴近摄影测量技术,与传统测量方法相比提升了约5倍测量效率。
(3)地形特征提取。无人机等低空作业装备搭载遥感设备可快速、准确地采集并提取果园田块的凸起、洼地等微地形特征[65],对于农田规划、灌溉设计、土地开发,以及防灾减灾等方面具有重要作用,为农田复垦及精准土地平整作业提供数据参考与方法支持。
综上,低空无人飞行器已应用于大田土壤肥力监测、田块测量、地形特征提取等作物产前环节,但因其需求较为灵活的飞行器和精密的传感设备,成本相对较高,尤其中小型果园鉴于投入产出比高、投入回报周期长、果园地形复杂等原因,当前在产前环节较少应用低空相关装备与技术。然而,低空经济的相关技术装备在大田作业产前阶段的成熟应用也为果园提供了清晰的发展路径,特别是低空平台在果园中可通过与物联网、远程监控等信息化管理系统[66]深度融合,实现更精细、立体、多维的数据采集和智能分析,促进产前管理从传统经验决策向数据驱动决策转变。
2.2 产中环节的应用和技术现状
2.2.1 生产环境低空遥感:空感监园
(1)产中土壤属性检测。对于果园地形起伏、泥泞的地面环境,传统地面评估设备在作物生长期难以高效开展作业。因此,采用低空飞行器不仅提高了数据获取的灵活性和作业效率,也为复杂环境下的土壤监测提供可行路径。目前主要利用无人机搭载多种遥感设备获取环境数据,基于提取的归一化植被指数(Normalized Difference Vegetation Index, NDVI)、叶面积指数等参数,结合图像处理、机器学习等方法来构建土壤成分反演模型,对土壤水分、盐分及其含氮量等信息进行检测。
遥感设备可分为被动遥感设备和主动遥感设备。RGB相机、多光谱相机和高光谱相机作为被动传感器,通过感应自然光来获取环境信息,通过分析各波段数据信息可完成对土壤状况的估测。如Kior等[67]使用RGB相机测定光合色素与氮含量,预测植物长势,从而反映土壤肥力;Liu等[68]基于无人机多光谱图像提取柑橘植被指数(Vegetation Index, VI)、纹理特征(Texture Features, TF)信息,以及叶绿素相对值,构建模型估算土壤表层含水量。潘时佳等[69]提出一种基于无人机多光谱冠层图像的改进卷积神经网络(Convolutional Neural Network, CNN),在猕猴桃复杂冠层条件下实现土壤水分含量的准确反演。赵文举等[70]对无人机多光谱影像使用支持向量机递归特征消除算法(Support Vector Machine-Recursive Feature Elimination, SVM-RFE),实现了不同作物和深度条件下土壤盐分的快速、精准反演。LiDAR作为主动遥感设备,通过自主发射光脉冲获取三维点云数据,与地面LiDAR相比,机载LiDAR具备强穿透性与高精度优势,更适合果园复杂冠层环境下的结构测量与生物参数估算[71]。如Li等[72]开发了基于深度学习的合成孔径雷达时空融合算法,重建土壤植被归一化指数。
Syifa等[78]利用“无人机+AI”技术,利用人工神经网络和支持向量机(Support Vector Machine, SVM)实现对松树线虫病的检测。闫云才等[79]利用无人机采集冠层顶层图像,结合地面移动平台采集的图像,通过像素统计方法计算单株果树的病虫害叶片数量与虫害率。荆怀龙等[80]使用多旋翼无人机搭载高光谱相机,构建滚动式成像系统,实现复杂地形下丘陵苹果树无死角高光谱监测。高德民等[81]融合物联网与无人机低空遥感,分析病虫害与环境因子间的相关性,实现长时滞空飞行、病虫害数据协同监测。此外,无人机与大数据可视化平台[82]融合,以实现对环境因子的动态感知与自动采集,为病虫害发生机理研究和精准防控提供数据支持。
表1 低空遥感技术在表征提取、生物量估测、产量评估中的应用Table 1 Application of low altitude remote sensing technology in characterization extraction, biomass estimation, and yield assessment |
| 遥感检测技术 | 提取特征参数 | 数据处理模型 | 作物 | 输出结果 | 参考文献 |
|---|---|---|---|---|---|
| RGB相机 | 叶面积指数 | 随机森林回归、逐步回归 | 猕猴桃树 | 产量估测 | [85] |
| 冠幅、树高、植被指数 | 数字高程模型 | 蜜柚树 | 产量估测 | [86] | |
| 植被指数 | 数字表面模型 | 砂糖橘树 | 果树分布提取 | [87] | |
| 植被指数 | 多元回归模型 | 枣树 | 冠层叶绿素含量监测 | [88] | |
| 冠层体积 | U-Net、大津阈值分割、随机抽样一致 | 梨树 | 冠层体积分割 | [89] | |
| 树冠冠层 | 基于种子块标记的分水岭算法 | 苹果树 | 单木分割 | [90, 91] | |
| 高光谱遥感 | 冠层光谱数据 | 最小二乘回归、SVM、极限学习机、随机森林 | 苹果树 | 叶氮含量估算 | [92] |
| 高光谱带 | Boruta迭代深度神经网络(Deep Neural Network, DNN) | 苹果树 | 叶氮含量估算 | [93] | |
| 多光谱遥感 | 植被指数 | XGBoost、随机森林、SVM | 柑橘树 | 果实分类与产量、品质估测 | [94] |
| 表型特征与植被指数 | 随机森林、BP神经网络、支持向量回归 | 苹果树 | 产量估测 | [95] | |
| 植被指数 | CNN、长短期记忆网络、集成学习 | 葡萄藤 | 产量估测 | [96] | |
| 植被指数 | 人工神经网络 | 葡萄藤 | 产量估测 | [97] | |
| 果树树冠 | YOLO深度学习 | 苹果树 | 树冠监测、喷雾处方图生成 | [7] | |
| 冠层体积、冠层高度、归一化植被指数 | 线性回归模型 | 栗子树 | 修剪木材生物量 | [98] | |
| LiDAR | 果树几何参数 | Alpha-shape算法、主成分分析算法 | 苹果树 | 树顶识别、树高和冠基高度测定 | [99] |
| LiDAR +多光谱 | 树冠体积、植被指数、树冠投影面积 | 集成机器学习 | 苹果树 | 产量估测 | [100] |
| 植被指数 | 主成分分析、线性回归 | 甘蔗 | 预测生物量与叶片氮含量 | [101] |
无人飞行平台采集的数据也可以同卫星、地面等其他遥感设备进行多源数据融合,发挥数据尺度的互补优势,实现果园灾害发生过程的动态跟踪,为果农提供科学的灾情应对依据。毕海峰和李杰[28]融合无人机遥感数据与中分辨率成像光谱仪(Moderate Resolution Imaging Spectroradiometer, MODIS)卫星影像、数字高程模型(Digital Elevation Model, DEM)与土地利用图,构建了时空协同的灾情评估模型。虽然当前关于低空飞行平台监测果园灾情的研究较少,但已有成果提供了清晰的技术路径,有助于果园快速制定补救措施和优化资源调配。
由上述4个方面可知,果园产中环节的环境感知监测正向提高数据采集的稳定性、实时性与精确性方向发展,并推动传感器成本优化与系统集成简化,解决多源遥感数据融合难度大、环境因素干扰严重、模型泛化能力不足等技术挑战,实现低空飞行平台在果园中的可持续推广和规模化应用。
2.2.2 低空精准施药施肥:增产达效
低空装备在果园植保中的应用主要体现在喷施关键部件研制与结构优化、飞行参数对沉积与飘移的调控技术、低空多机协同。低空无人飞行平台在精准施肥施药中的应用技术现状如表2所示。
表2 果园低空装备精准施肥施药技术Table 2 Precision fertiliser and medicine application technology for orchards with low altitude equipment |
| 技术方法 | 研究内容 | 作物 | 参考文献 |
|---|---|---|---|
| 喷施装置与精准对靶技术 | 喷雾量对液滴数量和喷雾覆盖率有显著影响 | 柑橘树 | [103] |
| 无人机空中喷洒比拖拉机喷洒的效果好,对土壤群落的影响较小 | 橄榄树 | [104] | |
| 综合资源消耗由小到大为单旋翼植保无人机、六旋翼植保无人机、风送喷雾机 | 苹果树 | [105] | |
| 无人机喷雾器比陆地果园喷雾器显著减少了空气飘移和环境污染 | 橄榄树 | [106] | |
| 结合先进的自动检测、风送、变量、对靶控制技术开展研究,减少污染 | 柑橘树 | [107] | |
| 无人机比传统设备的喷洒成本每公顷低7欧元 | 橄榄/柑橘树 | [108] | |
| 开发精准对靶喷洒地面站软件,实现设定喷洒参数等功能,进行基于处方图的喷洒 | 农田 | [109] | |
| 基于无人机多光谱遥感技术在西班牙开展了葡萄园冠层活力图构建研究 | 葡萄藤 | [110] | |
| 在巴西不同龄期柑橘园中,评估了无人机施药对柑橘木虱的防控效果 | 柑橘树 | [111] | |
| 提出一种结合无线传感网络的无人机农药喷洒自适应系统,可根据实时气象变化动态调整飞行路径修正参数 | / | [112] | |
| 无人机超低量施药在栗树病虫害防控中的药效可与气流式喷雾机相当,且喷雾覆盖率受施药量、飞行方式、机型尺寸、流量及树龄等因素影响显著 | 板栗树 | [113] | |
| 研发并评估了一种基于多旋翼无人机的农药喷洒系统在棉花、水稻和绿豆作物上的防治效果 | / | [114] | |
| 阐述了无人机施肥技术的应用现状,阐明了无人机施肥的巨大潜力,可以提高施肥的精准性和效率 | / | [115] | |
| 提出一种基于施肥处方图的颗粒肥无人机变量控制系统,通过飞控与撒肥模块协同,实现对槽轮排肥器的精准控制,显著提升施肥精度与效率 | / | [116] | |
| 设计多旋翼无人机撒肥系统,并利用EDEM仿真优化离心盘结构与作业参数,试验表明撒肥均匀性良好 | / | [117] | |
| 构建适用于水稻叶面施肥的控制系统 | 水稻 | [118] | |
| 基于高光谱数据获取处方图,利用“云鸮-100”无人机开展水稻精准追肥作业 | 水稻 | [119] | |
| 提出应将AI技术有效引入无人机精准施药系统中,提高系统的自适应性和鲁棒性 | / | [120] | |
| 飞行参数对沉积与飘移的调控 | 研究飞行高度、飞行速度和喷洒系统喷头安装位置参数对雾滴在苹果树上分布的影响 | 苹果树 | [121] |
| 雾滴粒径是影响香蕉冠层叶片雾滴沉积密度、覆盖率、均匀度及穿透性的主要因素 | 香蕉树 | [122] | |
| 无人机操作员调整飞行高度和速度,最大程度地减少在附近敏感区域的田外沉积 | 玉米 | [123] | |
| 极目EA-30X四旋翼植保无人机在试验园的最优作业参数为:飞行速度2.5 m/s、飞行高度2.5 m、喷液量4.0 L/hm2 | 柑橘树 | [124] | |
| 提出一种基于仿真果园试验台的植保无人机果园施药雾滴飘移测试方法,设计并制作仿真葡萄园试验台和空中飘移收集装置 | / | [125] | |
| 无人机在不同施药量与喷嘴配置条件下,对木瓜植株上层、中层、下层及果簇四个部位实施喷施作业时的液滴利用率进行评估 | 木瓜 | [126] | |
| 在飞行高度1.5 m、亩喷液量4.0 L/hm2、飞行速度3.0 m/s的飞行参数下,雾滴沉积密度和均匀性最优 | 库尔勒香梨树 | [127] | |
| 在标准棚架果园设计并开展了四因素(喷雾施用量、飞行速度、飞行高度和飞行方向)和三水平的无人机喷洒试验正交试验 | 梨树 | [128] | |
| 随着侧向风速的增加,离散雾滴粒子飘移程度越严重,雾滴水平飘移越明显 | / | [129] | |
| 建立植保无人机雾滴飘移测试试验台,总结植保无人机喷雾施药作业中旋翼转速和喷雾压力的自身性能参数对雾滴飘移的影响规律 | / | [130] | |
| 提出一种有效的喷幅确定方法,测定配备弥雾喷头的无人机的有效喷洒范围 | 南果梨树 | [131] | |
| 评估电动六旋翼无人机喷雾器在果园作业模式(不同施药量和飞行模式)的喷雾性能 | 苹果树 | [132] | |
| 量化在田间条件下使用商用无人航空喷洒系统在果园喷洒植物保护产品后的环境、居民和旁观者的暴露情况 | / | [133] | |
| 果园喷洒模式可以达到更好的覆盖率,而雾滴密度则相反,喷雾效果与喷雾量、有无助剂、喷雾模式、喷雾高度等密切相关 | 苹果树 | [134] | |
| 针对果园场景无人机多目标任务的航点规划问题,提出一种植保路径规划算法 | 柑橘树 | [135] | |
| 比较传统果园喷雾机和喷洒无人机在商业超高密度橄榄园中产生的飘移 | 橄榄树 | [136] | |
| 研发植保无人机施药沉积飘移监测系统,实时获取作业参数,并发送至平台软件,利用沉积飘移预测模型实时监测药液沉积区域及飘移范围 | / | [137] | |
| 低空多机协同 | 提出一种改进的遗传算法,为每台割草机分配并优化作业路径,提高作业能力 | 苹果树 | [138] |
| 基于多变异分组遗传算法的多机协同静态任务分配的机群代价比实际作业代价降低29.48%~55% | / | [139] | |
| 提出多传感器融合的环境感知与路径提取、完整路径规划、强通用性果园导航、大型果园多作业环节的多机协同与远程操作等未来发展方向 | / | [140] | |
| 基于神经辐射场的地空协同果园实景重建,实现了对果园-果树复杂系统定量化、可视化感知和认知 | 桃/苹果/梨树 | [141] | |
| 提出一种立体植保方案,利用无人机和地面喷雾器对果树冠层不同部位进行喷雾,以提高喷雾均匀度 | 苹果/芒果/柑橘树 | [142] | |
| 设计一种由果园履带式喷雾机和六旋翼植保无人机组成的空地协同立体植保系统,共同承担芒果园植保作业 | 芒果树 | [143] | |
| 提出一种无人机-地面车辆协同定点喷药系统,并研制了样机 | 井冈蜜柚树 | [144] |
(1)喷施装置与精准对靶技术。果园喷施作业过程中需识别树冠,以便喷头对准目标区域,实现药液在枝叶间的有效穿透与均匀沉积。小型多旋翼植保无人机是当前果园精准施肥施药的核心低空装备,可以有效提高化学制剂的利用效率[103-105],减少药剂飘移及对环境的污染[106]。当前低空施药关键技术重点关注喷施关键部件研制与结构优化、靶标识别、飞行参数对沉积与飘移的调控等方面,由粗放施药向精准施药方向发展[107]。在喷施关键部件方面,果园植保无人机已普遍搭载电动或液压雾化喷头,具备雾滴粒径可控、喷角精准调节与变量流量控制等功能,实现对不同树冠结构的差异化适配,降低喷施作业成本[108]。在精准对靶技术方面,以图像处理与深度学习[6]为基础的靶标智能识别与决策技术,通过识别作物冠层密度、树龄、病虫害分布等信息,配合RTK高精度定位和处方图系统[109],实现对靶变量喷施和动态路径规划,提高农药利用率。
在全球推动农业智能化与可持续发展的背景下,低空作业技术在果园中的应用正逐步由欧美国家拓展至世界多个国家。西班牙等果树种植密集国家已逐步开放植保无人机在丘陵和山地果园等复杂地形中的应用,以替代传统机械。相比拖拉机喷雾器,无人机具备更强的地形适应性和作业机动性,成为果园精准施药的重要手段。Campos等[110]在西班牙利用多光谱遥感构建葡萄园冠层活力图,结合决策系统实现变量施药,有效降低药液使用量。Miranda等[111]在巴西柑橘园中验证了无人机施药对柑橘木虱的显著防效。Faiçal等[112]提出结合无线传感网络的自适应喷洒系统,可根据气象变化动态调整航线,提升喷洒精度。Arakawa和Kamio[113]在日本板栗园研究发现,无人机超低量施药在防治栗象虫等方面效果良好,且能降低农药使用与施药风险。Parmar等[114]在印度验证了多旋翼无人机对白粉虱的高效防控。果园低空技术应用正从技术验证走向政策支持与商业化落地,具有重要推广价值。
施肥管理是果园作业中保障树体营养和提升果品品质的重要环节,无人机施肥具备精准高效、节肥减排等优势,在推动农业可持续发展方面潜力巨大[115]。Song等[116]提出一种基于施肥处方图的颗粒肥无人机变量控制系统,通过飞控与撒肥模块协同,实现对槽轮排肥器的精准控制,显著提升施肥精度与效率。任万军等[117]设计多旋翼无人机撒肥系统,并利用多用途离散元素法建模软件Altair EDEM仿真优化离心盘结构与作业参数,试验表明撒肥均匀性良好,效率为人工的12.5倍。极飞V50Pro无人机搭载睿播3系统,采用垂直播撒技术,具备110 kg/min下料能力和13.8 m/s飞行速度,适用于水稻追肥、小龙虾投饲等小面积作业场景。曲云霞等[118]开发集成喷施功能的试验平台,构建适用于水稻叶面施肥的控制系统。于丰华等[119]基于高光谱数据获取处方图,利用“云鸮-100”无人机开展水稻精准追肥作业,氮肥施用量较传统方式减少27.34%。无人机在颗粒与液态肥施用中的应用不断拓展,已成为农业精准施肥与绿色发展的重要支撑力量。
现阶段,相关研究开始关注将AI算法引入喷施决策与航线规划系统,提高自适应能力和鲁棒性,并实现按需喷洒的智能升级,使果园植保无人机操纵便捷化、智能化、个性化[120]。
(2)飞行参数对沉积与飘移的调控。果园作业应根据树高和密度设定适宜的飞行高度、速度与喷幅等参数,确保雾滴精准附着、减少药液飘移和空喷浪费。目前,国内外有关植保无人机等低空飞行平台的喷雾飘移研究集中在大田作物田间试验和旋翼下洗气流的计算流体力学(Computational Fluid Dynamics, CFD)模拟。对于果园作业条件,果树冠层体积更大更茂密,故当前相关研究大多聚焦雾滴的冠层沉积与穿透性[121],主要依靠调控飞行平台的作业参数增强穿透、减少飘移。其中,飞行平台的作业参数主要涵盖飞行高度[122]、飞行速度[123]、喷雾流量[124]、喷施压力、喷头类型[125, 126]等。相关研究表明,低空(4.5 m)、低速(1.5 m/s)、中等施药量(90 L/hm2)[127]可有效提升雾滴在果树冠层的沉积均匀性和穿透性,减少药剂的环境暴露和浪费;协同控制风速、喷雾压力等参数能够减少环境侧风引起的雾滴飘移[128, 129];同时需要根据果园的种植结构和种植条件调节作业无人机参数,减少重喷漏喷几率[130, 131]。大疆公司对T16农业无人机所搭载的果树模式作业流程进行了系统性评估,以冰糖橙树山地丘陵果园为应用场景,首先使用 P4R 无人机对果园进行航测,通过大疆智图完成建图并进行AI识别,精准识别出果树、障碍物、电线杆、建筑物、水面和地面,大疆智图会根据果树的高低变化生成三维航线,实现对果树区域的精准覆盖,能够完成果树飞防全自主作业。
目前,相关研究已经开始向“环境-参数-飘移”耦合建模与飘移实时监测方向发展,通过机载终端获取飞行与喷施参数,利用监测系统与飘移模型对喷雾区域预测[136],推动果园绿色、高效植保,为增产达效提供技术保障。
(3)低空多机协同。低空多机协同技术通过智能调度与任务分配,实现果园喷施、施肥等作业任务的并行化与高效化,特别适用于大面积或地形复杂果园,有效提升作业效率与资源利用率。当前,低空多机协同技术已逐步实现从单机自主作业向集群智能协同与空地协同作业的跨越。多机协同主要包括多机任务分配、路径规划、协作感知和协调行为等方面。在任务分配与路径规划环节,现有研究通过引入改进旅行商问题(Traveling Salesman Problem, TSP)算法[4]、蚁群算法、遗传算法[137]与多变异分组优化[138]等算法,解决低空无人系统在果园复杂地形下的路径全覆盖与任务均衡分配问题。在协作感知与协调行为方面,多机系统借助LiDAR、RTK定位、视觉同时定位与制图技术与三维点云建图等技术,构建感知-定位-路径-控制的完整协同架构,支撑高精度协作作业[139, 140];特别是果园可形成具有特色的地空协同立体植保系统,通过无人机与地面小型化喷雾机等无人车联动,充分发挥各装备对果树冠层不同位置的覆盖优势,实现施药行为与协同目标的统一,有效解决大型设备进园难、小型设备喷洒不均的问题[141-143]。
总体来看,多机协同技术已从算法规划、平台感知到系统集成构建出完整体系,向智能调度、全景感知与作业闭环控制方向发展,但环境适应性与路径规划实时性不足,相关研究尚未形成高效、低延迟、可实际应用的无人集群协同作业系统,多传感器融合与远程交互控制技术仍需突破。
2.3 产后环节的应用和技术现状
低空无人飞行平台在果园产后环节的应用主要体现在果实自动识别采摘与低空物流运输两个方面。在果实采摘识别方面,目前已可在冠层场景下实现果实成熟度识别和三维定位,完成单果摘取、分级与园内转运,但受限于续航、负载和操作精度,当前空中采摘系统多处于试运营阶段,主要针对高价值水果、丘陵“难机化”地块进行点状应用;在采收后果品转运环节,借助高精度定位、智能调度与避障控制技术,提升无人机在密植果园下的短距集货效率。虽然低空无人飞行平台在果园产后环节的研究和应用仍处于初步探索阶段,但已展现出提升果园采收效率、拓展物流半径与推动智能技术落地的关键价值。
2.3.1 果实低空识别与采摘:飞采惠农
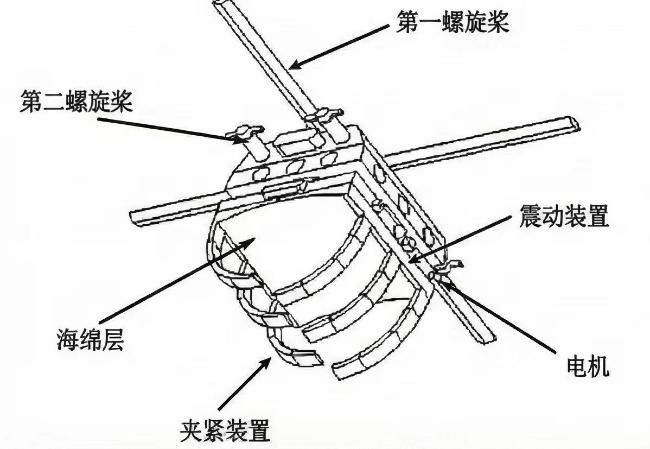
(1)末端采摘执行器。果实采摘是果园劳动强度较大的环节。利用低空飞行平台结合采摘装置实现高效采摘,对于降低人力投入具有实际意义。目前,果园低空无人平台专用的末端采摘执行器主要包括四种类型:机械切割型、热切割型、拉扭型和振动型[144]。机械切割型结构简单,通过刀具实现切割果梗;热切割型利用激光或高温实现非接触式切割,利于保鲜;拉扭型模拟人手动作,通过旋转扭断果柄采摘果实;振动型撞击树木使果树发生振动,从而使水果与果柄分离。例如,海建平[145]设计的无人机自动椰子采摘装置由倒刺镖发射器与微型激光切割机组成(图5);Tevel公司设计的果园采摘无人机通过水平前伸的采摘末端合住目标水果并拧断果柄,实现机械采摘(图6);刘继展等[146]研制了基于激光的果柄切割末端执行器(图7),对果梗具有良好的适应性;同济大学[147]设计了一种振动式松果采摘无人机(图8),通过激振器振动让周围果实掉落。
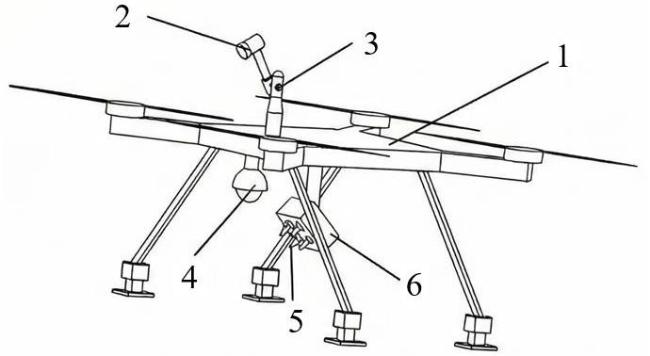
图5 带有激光切割机和倒刺镖的采摘无人机 Fig. 5 Picking drone with a laser cutter and barbed darts |


图7 果梗激光切割末端执行器 Fig. 7 Fruit stalk laser cutting end-effector |
2.3.2 低空物流运输:果运通达
如表3所示,目前低空物流依托5G通信、北斗高精度定位、智能调度系统与大容量动力系统,实现低空飞行自动化、可视化与标准化,已在城市“最后一公里”与偏远地区物流中展现出高效、灵活、低成本优势。国内通过一系列政策红利的释放,为低空物流产业的加速“腾飞”提供了强有力的支持。国际上,低空物流运输以无人机和eVTOL技术为核心,代表企业如Dronamics、Zipline、Amazon Prime Air等,广泛用于医疗、零售和偏远地区产品投递。
表3 低空物流运输领域的发展现状Table 3 Current status of low-altitude logistics and transportation |
| 国家 | 公司名称 | 核心产品/技术 | 已实现功能与应用场景 | 进展情况 |
|---|---|---|---|---|
| 中国 | 顺丰速运 | 无人机物流配送系统 | 实现山区/偏远地区的中长距离配送,最大航程100 km,载重5~25 kg,支持高原飞行 | 获得国内首个无人机物流航线商业运营许可证 |
| 京东物流 | 自研物流无人机+智能配送站 | 覆盖乡村物流,支持高原、丘陵地区运营,搭配仓储和智能配送系统,实现无人接收与派送 | 已完成多省县级航线布局 | |
| 蜂巢航宇 | “蜂眼”系列物流无人机 | 搭载全景视觉与自动避障系统,适用于应急救援、岛屿补给、农产品投送等场景 | 飞行高度可达3 000 m | |
| 御风未来(eVTOL) | M1纯电动载人/载物飞行器 | 2吨级纯电eVTOL飞行器,适用于城市空运/短途物流,目前进入载人验证飞行阶段 | 2024年签订百架物流采购意向协议 | |
| 星逻智能 | 城市无人机配送系统 | 支持大楼楼顶起降、城市无人配送,打造低空“配送网格” | 与顺丰合作布局“城市空中配送网” | |
| 美国 | Zipline | Zip 2无人机物流系统 | 专注医疗物资、高价值品的长航程无人机配送,在非洲、美国、亚洲多国广泛运营 | 运营超10万次飞行,医疗物流领先者 |
| Amazon Prime Air | Prime Air自动化物流无人机 | 支持城市快速投送服务,已在美国部分城市实现小包裹30分钟内无人机送达 | 获FAA许可,推进城市低空配送 | |
| UPS Flight Forward | Matternet M2合作无人机系统 | 医疗样本、医院间配送系统,与Matternet联合运营,已在美多州开展固定航线服务 | 获首个FAA“135标准”运营证照 | |
| 以色列 | Flytrex | Sky Delivery 无人机平台 | 以社区配送为主,可投放日常商品(餐饮、生鲜),已与沃尔玛等商业零售建立合作关系 | 投送范围3~5 km,约3 kg负载 |
| 法国 | Dronisos | 智能多机编队+物流无人机系统 | 除表演任务外开发物流模块,支持定点多点协同投送系统 | 开始城市物流试点 |
| 德国 | Volocopter | Volocity eVTOL飞行器 | 专注于城市空中出租车与低空物流,开发的eVTOL飞行器实现了多点之间的快速运输,支持城市空中交通(Urban Air Mobility,UAM)和医疗物资运输 | 在新加坡和德国开展了低空物流与空中出行的试飞与合作 |
| DDG | 多功能配送无人机系统 | 提供端到端无人机配送服务,特别关注货物、包裹等物流领域,已经开始在德国多个城市进行试点运输 | 已与多个物流公司合作,测试覆盖城市物流与应急物资配送 | |
| Rivada | 无人机集群物流配送系统 | 提供基于无人机的物流配送系统,专注于城市与乡村的快递配送,系统支持大规模无人机群组协作任务 | 提供包括自动化充电、数据回传和调度系统的全套解决方案 |
表4 低空物流运输的关键技术Table 4 Key technologies for low-altitude logistics and transportation |
| 领域 | 技术 | 成果 | 文献 |
|---|---|---|---|
| 夹持机构设计 | 四连杆刚性夹持器 | 开发了一种新型四连杆刚性夹持器,并在室内完成抓取放置试验 | [155] |
| 铰接式空中机器人 | 提出全自主拾取和放置方案,开发了具有主动可倾斜传感器的铰接机器人模型,实现自主的对象搜索、拾取和放置序列 | [156] | |
| 空中快速拾取和运输机器人(Rapid Aerial Pickup and Transport of Objects by Robots,RAPTOR)平台 | 研发四旋翼无人机快速抓取系统,配备Fin Ray夹具,利用软性材料增强夹具与物体的摩擦力,可更灵活地抓取不同几何形状的物体 | [157] | |
| 目标识别与环境感知 | LiDAR | 用于绘制周边环境地图,有效避免与障碍物发生碰撞,保障配送过程中的飞行安全 | [158] |
| IMU | 提升飞行过程中的姿态稳定性,确保物流配送过程中的精准定位 | [159] | |
| 摄像头、测距仪与目标识别算法 | 精确获取目标位置坐标,确保货物能够精准投送并准确着陆至指定地点 | [160] | |
| 运动控制 | 比例-积分-微分(Proportional-Integral-Derivative Control,PID)控制 | 采用PID控制方法,实现快速响应环境变化,保证物流任务完成 | [161] |
| 线性二次调节控制 | 使用线性二次调节控制方法实现高精度配送过程,优化飞行轨迹,提高姿态控制性能 | [162] | |
| 反馈线性化控制 | 实现多机协同运输的稳定轨迹跟踪,保证多机协作下的物流任务稳定进行 | [163] | |
| 航线规划 | 自适应路径优化模型 | 实现动态路径调整,可在飞行速度、作业时间等多重约束条件下进行航线优化 | [164] |
| K-means聚类算法与数学优化模型 | 优化配送中心选址,并改进配送路径规划策略,提高路径效率 | [165] | |
| 分布式鲁棒优化 | 用于应对配送过程中存在的不确定性因素,协同优化无人机物流配送系统中的设施选址与路径规划问题 | [166] | |
| 运输安全 | 折纸结构原理设计防护装置 | 基于形状记忆合金材料设计的无人机防护装置,提供全方位物理防护,增强无人机在运输中的安全性 | [167] |
| 避障技术 | 依赖于传感器与算法协同工作,在短时间内完成障碍物检测与规避操作 | [168] | |
| 动力能源 | 续航评估模型与电池优化 | 建立适用于不同类型无人机的续航评估模型,并优化电池配置与运行负荷参数,提高整机运行效率与续航能力 | [169] |
与快速发展的植保无人机相比,当前低空技术在果园场景中,尤其是果园农产品、生产必需品等生产资料运输的研究和应用有限,受限于着陆场地复杂、可用平台模式有限等因素,尚未形成规模化应用。然而,“低空运输+果园特性”可形成专业化、针对性的解决方案,在果品采后转运、物资定点配送、山区果园日常补给等方面具有巨大潜力。随着果园地图建模、路径智能规划与协同调度技术的成熟,低空飞行器有望成为果园智能物流链的重要一环,打通“果园到集散点”的“最后一公里”。
3 总结与发展趋势分析
3.1 主要局限
尽管果园低空经济在技术集成与应用实践方面取得了一定进展,但在实际推广过程中仍面临诸多技术瓶颈与制度障碍。主要体现在上游装备供给、中游技术协同及下游服务体系等关键环节,具体如下所示。
(1)上游产业的飞行平台载荷续航及适配的基础设施条件缺乏。当前果园专用的低空飞行平台仍以中型及以下无人机为主,载荷能力(通常低于50 kg)难以适配果园低空经济多样化作业需求,电池能量密度与续航能力(通常小于0.5 h)尚未突破,起降硬件设施简单,多(高)光谱、毫米波雷达等高精度传感器和机载高性能计算模块依赖进口,增加了装备成本与推广难度。
(2)中游生产环节的技术协同性不足。目前,植保、遥感监测等技术虽然已有研究和应用,但多针对单一需求与场景,缺乏全链条技术集成,且各环节数据孤岛依然存在,数据标准与数据接口多样,不利于高效协同管理;果园作业农艺要求与飞行平台的作业效果融合度较低,部分作业环节仍依赖人工经验;多机协同作业系统尚未成熟,集群调度算法与空域管理技术亟待突破。
(3)下游服务与市场机制需完善。果园低空经济下游的数字化服务平台建设滞后,农户与运营方的数据共享机制缺失,已有数据资产的价值挖掘不足,历史作业数据难以反哺模型优化;同时,相关服务行业的标准与政策缺失,保险、金融等配套尚未形成规模化供给,服务仍集中在农机租赁、购置补贴等简单模式,服务质量参差不齐,制约了产业闭环的形成。
3.2 果园低空经济产业链未来重点发展方向
为突破当前面临的瓶颈,果园低空经济应从技术研发、系统集成与服务创新等多个维度协同发力,重点发展方向如下:
(1)上游:大载荷长航时飞行平台研发与关键部件自主化。未来需重点突破高能量密度电池、轻量化复合材料、模块化载荷系统研发,推动长续航(>2 h)、大载荷(>100 kg)无人机的国产化进程;加快“空-天-地”一体化低空通信网络、低空大载荷飞机标准化起降设施与智能管控平台建设,构建适用果园复杂地理环境的多模态导航体系,降低空域使用成本。
(2)中游:数据驱动的果园生产全环节技术深度融合。未来需构建基于端边云的“无人机(空)+机器人(地)”的一体化混合架构体系,推动果园作业从单机离散操作向群体智能化演进;开发多模态数据融合的智能决策系统,结合大模型、大数据等人工智能方法,实现产前规划(立地测量、地块分割)、产中作业(精准施肥药、授粉)、产后采收(果实分选、物流调度)的全周期协同。
(3)下游:服务生态构建与价值链延伸。未来需建立病虫害预测、产量预估、地理信息等多模融合的果园低空作业数据库,开发面向旅游、农业作业等不同需求的数据产品;推动低空空域管理改革试点,健全法律法规、政策制度、保险金融等配套机制,使果园低空经济从当前无人机植保单一服务供给向物流、旅游等其他环节拓展。
3.3 中游生产环节技术创新方向
面向果园低空经济的中游生产环节,亟需推动核心作业技术的智能化、自主化与系统化创新,以打通感知、决策、执行的闭环逻辑。未来可从以下几个关键技术方向着力突破:
(1)自主化精准作业技术。研发多模态感知融合系统(视觉+线性二次调节+多光谱),结合RTK高精度定位与强化学习算法,实现复杂果园环境下自主避障与动态路径规划。开发自适应变量作业技术,通过边缘计算实时调整施药量、授粉密度等参数,减少农药浪费与环境污染。
(2)分布式协同控制技术。构建基于数字孪生的多机协同调度平台,集成时空避障算法与任务分配模型,支持百架级无人机集群在密植果园中的高效协同。探索“主从式”异构无人机协作模式,例如固定翼无人机负责广域监测,多旋翼无人机执行定点作业,形成资源互补。
(3)人机物三元融合技术。开发虚实联动的数字孪生果园系统,通过增强现实(Augmented Reality, AR)、虚拟现实(Virtual Reality, VR)界面实现远程作业监控与仿真推演,降低农户技术使用门槛。融合区块链技术构建可信数据闭环,确保作业数据可追溯、质量可认证,提升产业链透明度。
(4)自适应长航时动力技术。研发高比能固态电池与混合氢燃料动力舱,配合智能换电/加氢站,实现丘陵果园区域的“快补能-长续航”闭环。在云端部署能耗预测模型,通过边缘-云协同算法对无人机群的电量、载重与作业路线进行联合优化,最大化单次作业覆盖率并降低单位能耗与碳排放。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}