



0 引 言
1 材料与数据处理
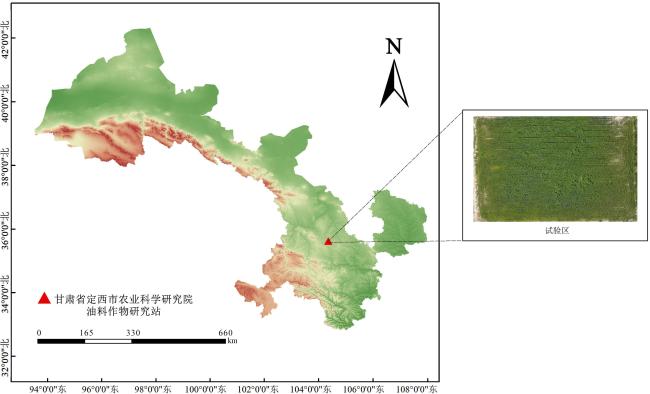
1.1 试验区概况
1.2 图像获取及预处理
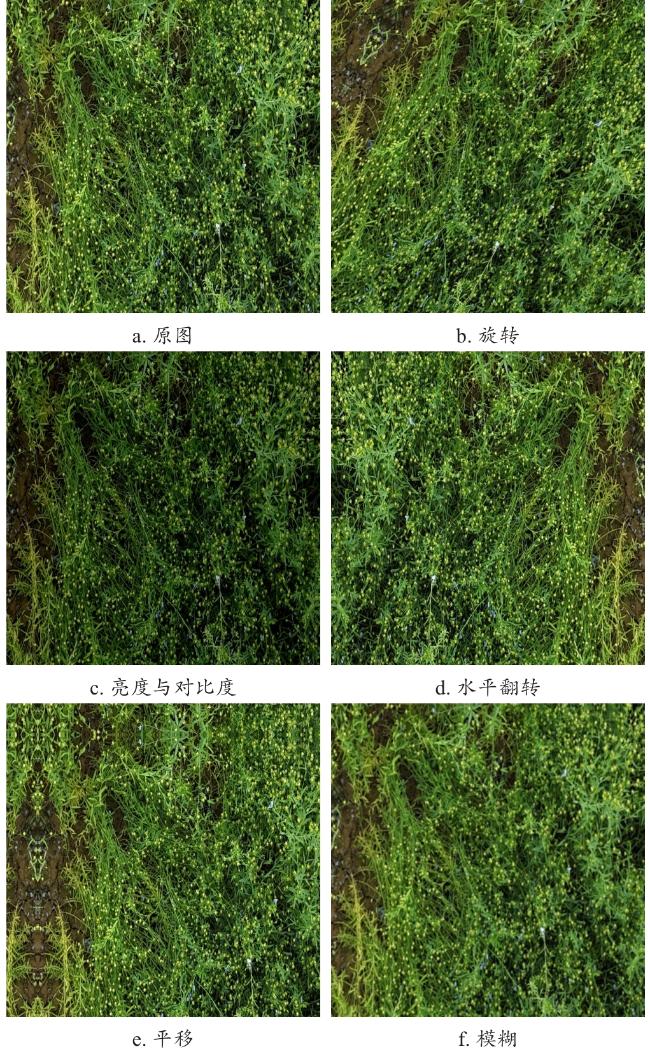
表1 胡麻倒伏数据集信息 (张)Table 1 Information of the flax lodging dataset |
| 初始数据集 | 增强数据集 | |||
|---|---|---|---|---|
| 训练集 | 验证集 | 测试集 | 总计 | |
| 107 | 2 889 | 577 | 386 | 3 852 |
2 研究方法
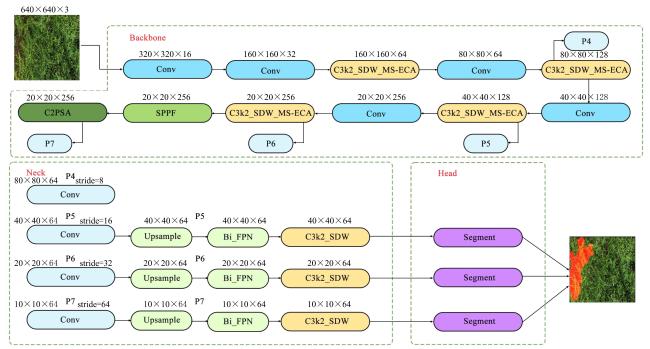
2.1 基准模型YOLOv11n-seg
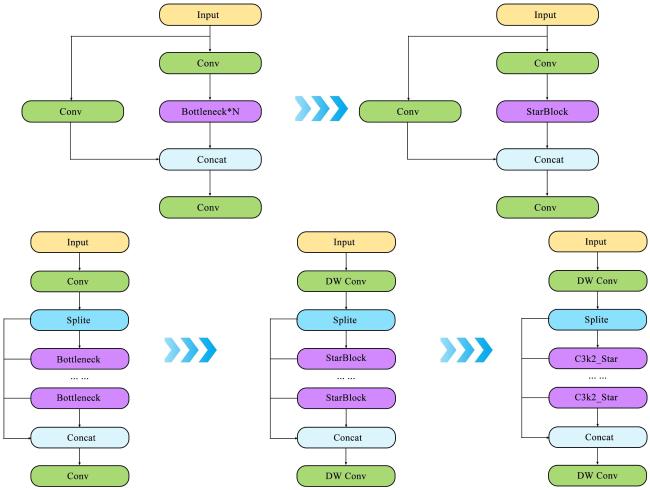
2.1.1 C3k2_SDW主干网络
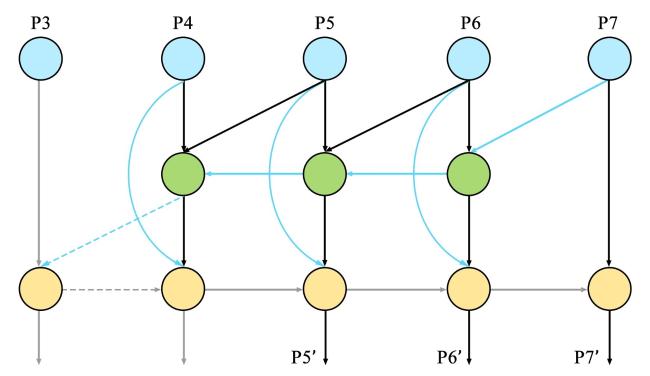
2.1.2 BiFPN颈部结构
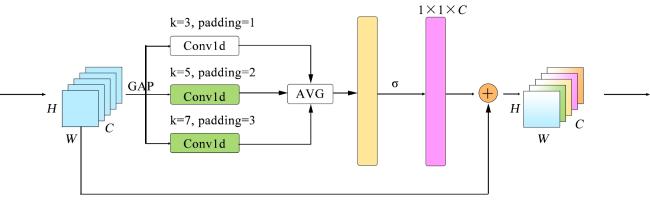
2.1.3 多尺度通道注意力机制
2.1.4 C3k2_SDW_MS-ECA复合模块
2.2 试验方法
2.2.1 试验环境与参数配置
2.2.2 评价指标
3 结果与分析
3.1 消融实验
表2 改进胡麻倒伏识别模型消融实验结果Table 2 Ablation experiment results of the improved model for flax lodging recognition |
| 模型 | P/% | R/% | mAP@0.5/% | Boundary IoU | 参数量/M | 计算量/GFLOPs |
|---|---|---|---|---|---|---|
| Baseline | 88.9 | 86.2 | 93.1 | 80.3 | 2.83 | 10.2 |
| C3k2_SDW | 89.8 | 87.6 | 93.0 | 79.8 | 2.14 | 8.1 |
| C3k2_SDW+BiFPN | 90.1 | 91.5 | 93.8 | 81.0 | 1.68 | 7.7 |
| Improved model | 92.6 | 92.0 | 95.2 | 82.3 | 1.73 | 8.0 |
3.2 不同模型实验结果对比
表3 不同胡麻倒伏识别模型对比实验结果Table 3 Comparative experimental results of different models for flax lodging recognition |
| 模型 | P/% | R/% | mAP@0.5/% | Boundary IoU | 参数量/M | 计算量/GFLOPs | 模型体积/MB | 推理速度/(帧/s) |
|---|---|---|---|---|---|---|---|---|
| YOLACT | 56.8 | 59.6 | 60.3 | 65.5 | 9.38 | 35.0 | 37.5 | 38.10 |
| YOLOv7-seg | 95.1 | 93.0 | 95.0 | 83.9 | 37.84 | 141.9 | 73.0 | 87.31 |
| YOLOv8n-seg | 92.2 | 87.2 | 93.4 | 78.5 | 3.26 | 12.0 | 6.8 | 111.18 |
| YOLOv11n-seg | 88.9 | 86.2 | 93.1 | 80.3 | 2.83 | 10.2 | 6.0 | 98.72 |
| Improved model | 92.6 | 92.0 | 95.2 | 82.3 | 1.73 | 8.0 | 3.8 | 119.20 |
3.3 与主流语义分割模型的对比实验
表4 改进模型与主流语义分割模型的性能对比实验结果Table 4 Comparative performance experimental results between the improved model and mainstream semantic segmentation models |
| 模型 | Boundary IoU | 参数量/M | 计算量/GFLOPs | 推理速度/(帧/s) |
|---|---|---|---|---|
| U-Net | 77.2 | 24.90 | 44.1 | 68.93 |
| DeepLabv3+ | 83.9 | 54.40 | 53.0 | 50.00 |
| Improved model | 82.3 | 1.73 | 8.0 | 119.20 |
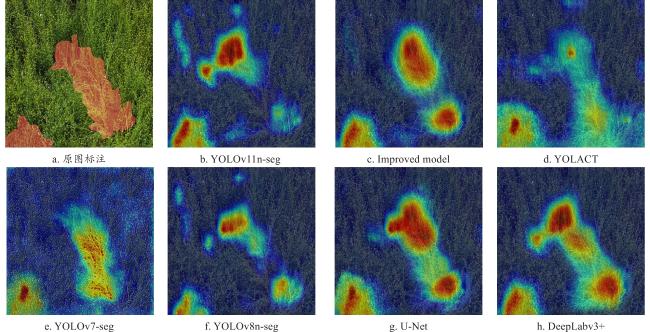
3.4 可视化分析
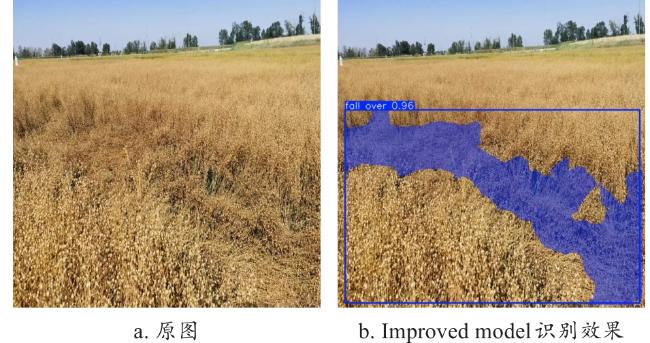
3.5 跨区域适应性验证
3.6 倒伏面积与产量损失估算的拓展性分析
表5 胡麻倒伏等级划分标准Table 5 Classification criteria of flax lodging grades |
| 倒伏等级 | 倒伏面积率对应倒伏程度 |
|---|---|
| 0级(未倒伏) | 未倒伏 |
| 1级(轻度倒伏) | 0%~<15% |
| 2级(中度倒伏) | 15%~<45% |
| 3级(重度倒伏) | 45%及以上 |
3.7 不同数据集对比结果分析
表6 改进模型在不同数据集的对比实验结果Table 6 Comparative experimental results of the improved model on different datasets |
| 类别 | P/% | R/% | mAP@0.5/% | ||||||
|---|---|---|---|---|---|---|---|---|---|
| YOLOv11n-seg | Improved model | 提升/百分点 | YOLOv11n-seg | Improved model | 提升/百分点 | YOLOv11n-seg | Improved model | 提升/百分点 | |
| 全部 | 69.2 | 73.5 | 4.3 | 56.2 | 58.1 | 1.9 | 61.6 | 64.2 | 2.6 |
| 裸地 | 88.5 | 92.3 | 3.8 | 61.3 | 61.1 | -0.2 | 68.9 | 69.3 | 0.4 |
| 土壤 | 80.0 | 87.3 | 7.3 | 88.4 | 89.3 | 0.9 | 92.3 | 94.1 | 1.8 |
| 蚕豆 Vicia faba L. | 67.0 | 71.5 | 4.5 | 64.3 | 64.3 | 0.0 | 66.6 | 64.8 | -1.8 |
| 黑麦草 Lolium perenne L. | 83.1 | 86.9 | 3.8 | 82.9 | 84.1 | 1.2 | 89.6 | 91.0 | 1.4 |
| 红根苋 Amaranthus tricolor L. | 85.0 | 87.5 | 2.5 | 86.7 | 89.2 | 2.5 | 89.6 | 92.0 | 2.4 |
| 荞麦 Fagopyrum esculentum Moench. | 90.8 | 92.2 | 1.4 | 84.0 | 84.2 | 0.2 | 86.7 | 87.4 | 0.7 |
| 豌豆 Pisum sativum L. | 44.9 | 48.2 | 3.3 | 15.0 | 12.5 | -2.5 | 15.3 | 16.2 | 0.9 |
| 红指草 Digitaria sanguinalis (L.) Scop. | 77.8 | 75.6 | -2.2 | 38.8 | 50.0 | 11.2 | 49.2 | 55.4 | 6.2 |
| 野燕麦 Avena fatua L. | 68.1 | 73.5 | 5.4 | 53.8 | 55.4 | 1.6 | 59.7 | 63.6 | 3.9 |
| 矢车菊 Centaurea cyanus L. | 68.2 | 76.5 | 8.3 | 64.9 | 68.0 | 3.1 | 69.7 | 75.4 | 5.7 |
| 麦仙翁 Agrostemma githago L. | 88.8 | 86.3 | -2.5 | 82.6 | 78.3 | -4.3 | 88.2 | 84.9 | -3.3 |
| 玉米 Zea mays L. | 77.2 | 77.8 | 0.6 | 88.2 | 89.5 | 1.3 | 88.7 | 91.3 | 2.6 |
| 奶蓟 Silybum marianum (L.) Gaertn. | 68.2 | 72.0 | 3.8 | 34.9 | 41.1 | 6.2 | 41.7 | 53.0 | 11.3 |
| 玉米草 Setaria viridis | 14.9 | 13.8 | -1.1 | 10.5 | 5.36 | -5.2 | 12.0 | 10.4 | -1.6 |
| 大豆 Glycine max (L.) Merr. | 59.6 | 67.9 | 8.3 | 72.8 | 84.7 | 11.9 | 77.6 | 85.4 | 7.8 |
| 向日葵 Helianthus annuus L. | 61.3 | 84.8 | 23.5 | 12.8 | 14.4 | 1.6 | 23.0 | 30.5 | 7.5 |
| 车前草 Plantago lanceolata L. | 44.0 | 46.6 | 2.6 | 14.1 | 17.1 | 3.0 | 24.6 | 25.0 | 0.4 |
| 小花天竺葵 Geranium pusillum L. | 78.5 | 81.8 | 3.3 | 55.0 | 58.2 | 3.2 | 64.5 | 66.6 | 2.1 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}