



0 引 言
近年来,目标检测技术在农业计算机视觉领域展现出强大的潜力[4]。串番茄的目标检测方法主要分为基于传统机器学习的方法以及基于卷积神经网络的方法[5]。对于传统的机器学习方法,毕智健等[6]对RGB(Red,Green,Blue)图像预处理后转换至HIS(Hue,Intensity,Saturation)和HSV(Hue,Saturation,Value)模型,提取多颜色分量均值,经SPSS(Statistical Package for the Social Sciences)特征筛选后用Matlab判别分析,成熟大番茄在验证集中的识别率为70%,体现出机器学习的方式对人工颜色特征依赖强、预处理要求高。2019年,VILLASEÑOR-AGUILAR等[7]提出了一种以RGB颜色模型为基础,借助模糊系统实现番茄成熟度分类,对比不同颜色模型的效果,并通过树莓派完成数据采集与估算,最终为番茄成熟度的自动化、低成本检测提供可行方案。该方法仅在受控环境下完成实验,后续若要应用于实际农田等复杂场景,还需优化以应对光照变化等干扰因素。2022年,王等[8]提出了一种基于机器视觉和电子鼻融合的番茄成熟度检测方法,该方法通过机器视觉提取番茄的6个颜色特征,利用电子鼻采集10个气味特征,以这些多源特征为基础建立最小二乘支持向量机模型,该模型在测试集识别准确率为84.02%,该方法可变因素较多,导致其在成熟度识别上存在局限性。传统机器学习方法在串番茄成熟度识别中虽具备实现简单、响应快速等优势,但普遍存在对手工特征依赖强、对图像预处理要求高、难以适应重叠遮挡与光照变化等复杂场景的局限。
随着深度学习和计算机视觉的快速发展,基于卷积神经网络的方法,Dugang[9]等研究提出多分辨率检测器用于番茄常见病害识别,通过Dropout(Random Dropout of Neural Network Units)和AdamW(Adam with Weight Decay Fix)优化器缓解过拟合问题,可识别10类番茄病害。该模型虽兼顾实时性,但平均识别准确率仅85.03%,低于同期多数深度学习模型,其精度短板源于多分辨率特征提取时对复杂病害斑点与背景的区分不足。Su等[10]针对自然温室环境下大番茄成熟度分类任务,提出了一种结合挤压-激励注意力机制(Squeeze-and-Excitation, SE)与MobileNetV1的改进YOLOv3网络,该模型推理速度达到28 FPS,在复杂遮挡场景下分类准确率为81.3%,且在内存较小的低端嵌入式平台上,推理延迟会增加至150 ms以上,参数规模约为12.8 MB,不利于在资源极度受限的设备上部署。2023年,WANG等[11]以YOLOv3-MobileNetV1为基础框架,引入SE注意力机制,强化了模型对串番茄成熟度区分性特征的关注能力。该模型在自然温室环境下,面对叶片遮挡的串番茄时识别率达到82%。
可见,目前主流的目标检测模型在面对串番茄成熟度识别仍存在计算资源需求高、对复杂背景和光照变化适应性不足,以及模型结构复杂导致推理速度较慢和部署难度大等问题。如何在保持高检测精度的同时,有效压缩模型体积与计算资源消耗,成为当前研究的难点。鉴于此,本研究提出了一种结合LAMP通道剪枝与SegNeXt注意力机制的串番茄成熟度检测模型。该模型在保证高识别精度的前提下,通过LAMP剪枝实现网络瘦身,并利用SegNeXt增强对图像关键区域的关注能力,从而提升模型对串番茄3分类成熟度目标的感知与判别能力。本研究的主要贡献如下:
(1)提出了一种基于LAMP通道剪枝与SegNeXt注意力机制的轻量级串番茄成熟度检测模型,能够实现串番茄3分类成熟度的快速精准判别;
(2)通过引入基于梯度的全局通道重要性评估方法LAMP,实现了模型的高效轻量化;
(3)将LampCT-YOLO模型与YOLOv8、YOLOv10、YOLOv11及YOLOv12模型共计20个版本进行了全面对比,结果验证了提出模型在串番茄成熟度检测任务中的优越性。
1 材料与方法
1.1 图像采集
本研究于2024年9月—2025年1月,在江苏省农业科学院智慧农业综合试验示范基地,开展3分类成熟度的串番茄图像数据采集试验。在串番茄种植的成熟阶段,为了准确获取番茄果串的RGB图像数据,并用于后续的成熟度分级识别,本方案采用英特尔RealSense D435i RGB-D相机进行图像采集(图1)。具体采集措施如下。
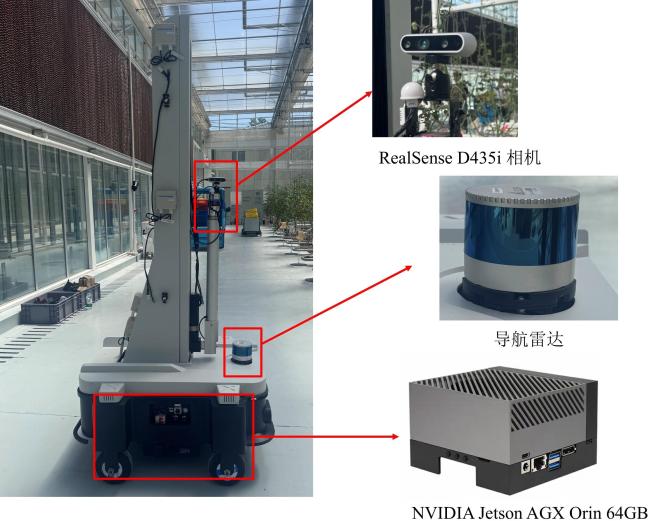
1)相机安装与定位。将深度相机固定于巡检机器设备的机械臂末端,确保相机在移动过程中保持稳定。机械臂的高度稳定在1.2 m左右,以匹配番茄植株的生长高度,避免因高度偏差导致图像畸变或遮挡。根据现场环境(如植株密度、光照条件等)调整相机的俯仰角度( )和水平偏转角度( ),确保番茄果串始终位于RGB镜头的有效视野范围内。相机与目标果串的最佳拍摄距离控制在0.5~1 m,以兼顾图像清晰度和视野覆盖范围。若距离过近,可能导致部分果串超出视场;若距离过远,则可能影响细节分辨率。
2)相机参数设置。将相机的RGB镜头参数设置为1 280×720,确保图像具有足够的像素信息用于后续分析,同时避免过高的分辨率导致存储压力。拍摄时采用30 FPS的采集帧率,保证动态拍摄时图像的流畅性,避免因帧率过低导致运动模糊。通过USB 3.0接口将相机与计算机连接,确保高速数据传输,并采用外接电源或大容量移动电源进行持续供电,避免因电量不足中断采集任务。
3)数据采集。移动巡检机器沿番茄种植行间匀速行走(保持在0.3~0.5 m/s),确保相机在稳定状态下拍摄,减少运动时使得拍摄图片模糊。采集过程中,实时监测图像质量,若发现光照不均、遮挡或失焦等问题,立即调整相机参数或重新拍摄。将采集后的图片进行保存,用于串番茄成熟度分级标准识别。
1.2 图像处理
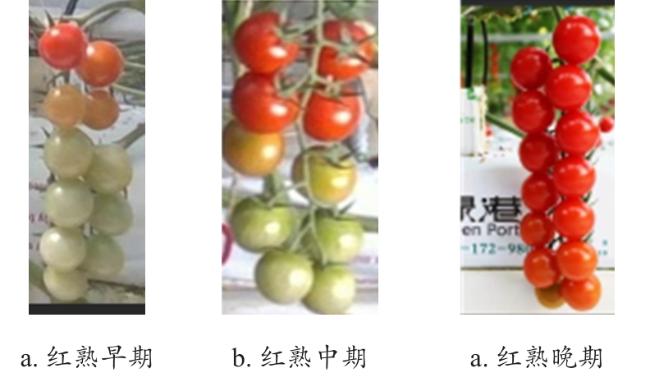
为确保后续分析的准确性和效率,对原始数据集进行筛选,去除因拍摄抖动或重复拍摄导致的模糊图像,及内容高度相似的冗余样本。利用图像标注工具Labelme,对筛选后的1 000张图像进行精细化标注,生成包含类别标签红熟早期、红熟中期、红熟晚期的结构化数据集(表1)。
表1 串番茄三类成熟度标注样本数量Table 1 Sample counts for three maturity stages of cluster tomatoes |
| 成熟时期 | 训练集 | 验证集 | 测试集 | 总计(占比/%) |
|---|---|---|---|---|
| 红熟早期 | 93 | 841 | 148 | 1 082(32.07) |
| 红熟中期 | 104 | 934 | 166 | 1 204(35.07) |
| 红熟晚期 | 107 | 831 | 149 | 1 087(32.86) |
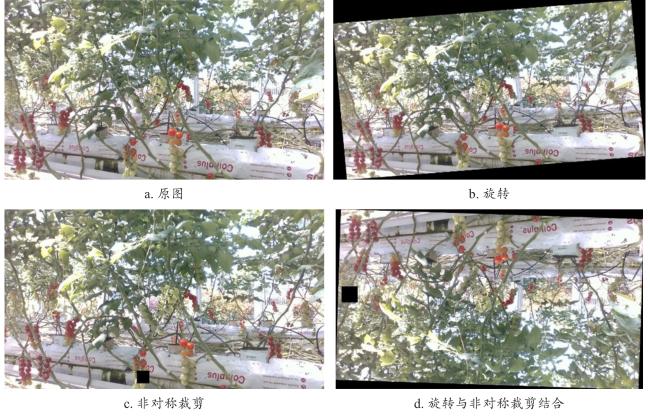
为提升模型泛化能力,采用几何变换技术对标注数据进行增强处理(图3),通过随机旋转模拟不同拍摄角度,并应用非对称裁剪(保留70%~90%原始区域)增加果实排列的多样性,最终将数据规模扩展至2 400张。将增强后的数据集按照8∶1∶1的比例,划分为训练集(1 920张)、测试集(240张)和验证集(240张)。
1.3 LampCT-YOLO
1.3.1 LampCT-YOLO模型结构
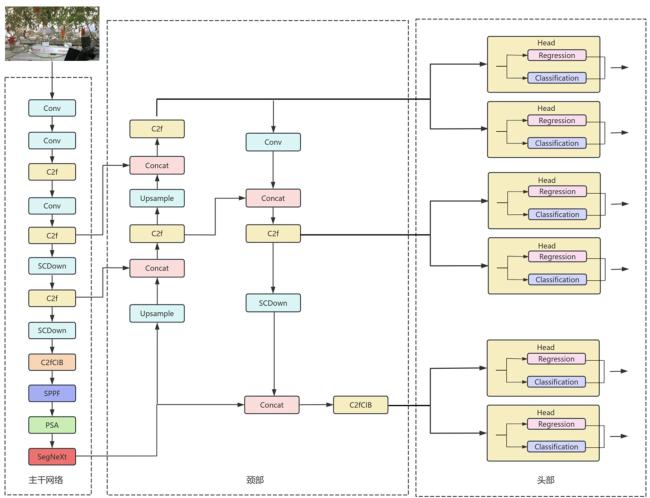
在实际的串番茄成熟度识别任务中,由于背景复杂且不同类别间的特征相似性较高,传统模型在区分成熟度接近的番茄样本时常面临较大挑战[14]。本研究提出LampCT-YOLO模型(图4),该模型分为主干网络、特征融合层和检测层,目标是提升模型在复杂背景下对不同成熟阶段番茄的检测精度,尤其是对小而密集的番茄目标的识别能力[15]。输入层采用了非对称裁剪和随机旋转的数据增强策略,以提升模型对环境变化的适应能力,并统一图像尺寸以提高训练效率。该策略对于自然光和温室条件下的串番茄成熟度识别尤其重要[16]。主干网络在最后的C2f模块后插入了SegNeXt注意力机制,提升对番茄细节特征的提取能力,增强对果实边界、颜色深浅等成熟度关键特征的感知能力,从而有效提升对成熟番茄和未熟番茄的区分度。特征融合层中,采用轻量路径聚合网络(Path Aggregation Network, PAN)构,实现不同尺度特征图的融合。该设计有助于检测密集分布的串番茄,尤其是大小不一、遮挡程度不同的果实。检测层以多尺度特征图为输入,通过多个检测头对不同尺度的番茄果实进行预测,最终输出统一的检测结果,以实现对不同大小番茄果实的有效检测。模型通过anchor-free的预测方式,提升对串番茄中不同形态果实的定位精度,并结合分类与置信度预测,实现红熟早期、红熟中期、红熟晚期的自动识别。通过上述设计,LampCT-YOLO模型在保证检测速度的同时,显著提升了在实际农业场景下的番茄成熟度识别准确性。
1.3.2 SegNeXt注意力机制
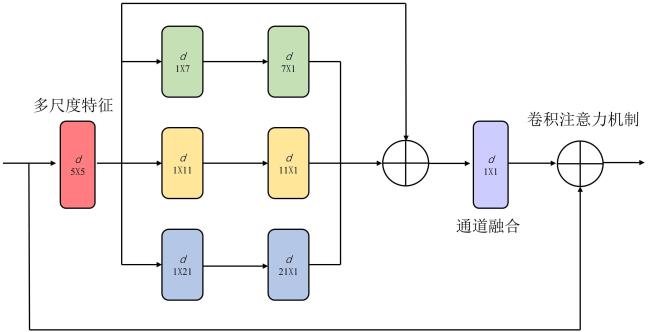
为提升模型的判别能力,本研究在YOLOv10主干网络末端引入了SegNeXt注意力机制[17]。该模块通过构建多尺度空间注意力与通道注意力的协同机制,使模型能够动态增强与果实成熟度相关的特征响应,同时有效抑制背景噪声的干扰。SegNeXt具备出色的多尺度特征建模能力,尤其适用于农业场景中果实排列多样、互相遮挡等情况,能够引导模型在不同尺度下精准关注关键区域。与传统注意力机制如SE(Squeeze-and-Excitation Network)[18]或CBAM(Convolutional Block Attention Module)[19]相比,SegNeXt在计算开销较低的前提下,能够更好地捕捉局部细节与多尺度特征信息,对于区分成熟度相近但细节差异微弱的番茄至关重要。此外,SegNeXt的引入显著增强了模型在复杂环境下的鲁棒性,有效缓解了光照变化、果实重叠及叶片遮挡等因素对识别准确率的影响。具体来说:
SegNeXt注意力模块首先通过1个1×1卷积将Backbone输出的高维特征图通道数压缩至固定维度,以降低计算复杂度并统一特征表征空间。随后,通过3条空洞卷积分支(空洞率分别为 )在不同感受野下重组特征,来兼顾被茎叶遮挡的局部成熟特征与整体形态信息。3路输出在通道维度上拼接后,经1×1卷积与修正线性单元(Rectified Linear UniReLU)激活融合,实现多尺度语义的非线性增强。接着,对融合特征分别进行全局平均池化与最大池化,得到两张统计特征图,经过7×7卷积、BN(Batch Normalizatione)与Sigmoi(Sigmoid Function)映射生成空间注意力图,如公式(1) 所示。
式中: 为注意力权重矩阵,用于衡量特征图不同位置的重要程度; 为Sigmoid激活函数,将输入映射到(0,1)区间,实现注意力权重的归一化; 为批归一化操作,用于对输入特征进行归一化,加速模型训练并提升稳定性; 为尺寸为 7×7 的卷积操作,用于对输入特征进行特征提取与维度变换; 是对特征图 进行平均池化操作用于提取特征图的全局统计信息; 是对特征图 进行最大池化操作,用于提取特征图的关键局部信息。
将其与融合特征逐元素相乘以突出关键区域,如公式(2) 所示。
式中: 为经过注意力机制加权后的输出特征图(矩阵),融合了原始特征信息和注意力权重信息,能够突出重要特征并抑制无关特征。
最后,将加权特征与压缩通道特征残差相加,并经1×1卷积恢复通道数,如公式(3) 所示。
式中: 为经过1×1卷积操作后的输出特征图(矩阵),是该运算的最终结果; 是尺寸为1×1的卷积操作,用于对输入特征进行通道维度的变换或信息融合,同时保持特征图的空间尺寸不变; 为另一路输入的特征图(矩阵)。
由此实现了特征的高效增强与稳定传递,为检测头提供更加聚焦于成熟度判别的语义信息(图5)。
1.3.3 LAMP通道剪枝
式中: 和 分别表示基线模型与轻量化模型的参数量; 对应计算量, 和 为模型改进前后的平均识别准确率 和 为比例因子,反映参数与计算量的压缩程度。试验表明,轻量化操作通过牺牲部分精度 换取模型效率提升 ,为资源受限场景下的部署提供了可行性基础。
式中: 这是原始输入向量,它可以是模型中的一个权重向量、一个特征向量或任何其他向量。
然后通过计算每个权重的重要性得分s,基于其幅度的平方和,如公式(6) 所示。
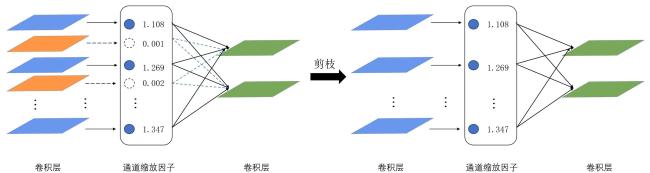
式中: 为归一化后的权重矩阵元素,由原始权重经归一化得到。最后将所有层的通道重要性得分合并进行排序,确保全局剪枝一致性。根据目标稀疏度和层敏感度,自动分配各层剪枝比例,移除重要性低的通道,同步调整相邻层的输入/输出通道数,保持网络连贯性,具体如图6所示。
1.3.4 评估指标
为全面评估LampCT-YOLO模型的性能,选取mAP50(Mean Average Precision, mAP)、FPS(Frames per Second)、GFLOPs(Giga Floating Point Operations)、模型权重文件大小以及参数量(Parameters)5项核心指标,从精度、速度、复杂度和部署成本等多个维度综合反映模型的优劣,具体定义如下:
mAP50用于衡量模型在识别不同成熟度等级串番茄目标时的检测准确率;N表示类别数; (Average Precision of class)表示第i类在IoU=0.5下的平均精度,具体计算如公式(7) 所示。
式中: 为平均精度均值,是目标检测任务的核心评价指标,衡量模型在IoU阈值为50%时对所有类别的综合检测精度; 为第i类的平均精度,是衡量模型对单个类别检测性能的指标,通过计算该类别Precision-Recall曲线下的面积得到。
FPS的计算如公式(8) 所示。
式中: 表示单帧图像的平均推理时间。
FLOPs和GFLOPs的计算如公式(9) 所示。
式中: 为浮点运算次数,是衡量模型计算复杂度的核心指标,仅统计乘法和加法运算; 、 为输入、输出特征图的通道数; 、 为卷积核的高度、宽度; 、 为输出特征图的高度、宽度;GFLOPs用于衡量LampCT-YOLO模型在执行1次完整识别任务时所需的计算资源。
模型权重文件大小表示模型在存储设备中所占的空间,直接影响模型在资源受限的智能农机装备上的部署便捷性与加载速度。模型参数量则指LampCT-YOLO模型中需要学习和存储的参数数量,代表模型结构复杂度与内存资源消耗水平。
通过以上多维度指标的综合评估,可全面分析模型在串番茄成熟度识别任务中的准确性、效率与轻量化表现。
2 结果与分析
2.1 试验设置
本研究试验在配备NVIDIA A100系列GPU、Intel i7处理器及32 GB内存的工作站上完成,操作系统为Ubuntu 18.04,深度学习框架基于PyTorch 2.0.1与CUDA 11.8。
在稀疏训练阶段,采用了LAMP稀疏正则化策略,其主要目的是通过稀疏化模型中的冗余通道参数,提升推理效率并降低计算成本。具体的设置包括:稀疏正则化权重0.04,正则衰减因子0.05,并将训练轮数设置为500轮。该过程能够有效促使网络学习到更加紧凑的特征表示。
在超参数配置上,采用了AdamW优化器,初始学习率为0.001,并使用余弦退火学习率[24]调度(Cosine Annealing LR Scheduler)。损失函数方面,检测部分使用了CIoU Loss(Complete Intersection over Union Loss)进行边界框回归,分类和置信度分支则使用了Focal Loss,以解决类别不平衡问题。Batch Size设为16,并使用了0.000 1的权重衰减。为了防止过拟合,引入了早停机制,当训练集的损失在连续50轮内未进一步下降时,训练自动终止。
2.2 消融试验
表2 串番茄成熟度检测的SegNeXt注意力机制消融试验Table 2 Ablation experiment of segnext attention mechanism for cluster tomato maturity detection |
| 模型 | 红熟早期/% | 红熟中期/% | 红熟晚期/% | mAP50/% | FPS | 权重文件大小/MB | 参数量/MB | GFLOPs/GB |
|---|---|---|---|---|---|---|---|---|
| YOLOv10 | 79.1 | 81.8 | 87.5 | 82.8 | 37.37 | 107.7 | 45.811 | 106.700 |
| YOLOv10+SegNeXt | 84.6 (+5.5) | 89.5(+7.7) | 88.4(+0.9) | 87.5(+4.7) | 35.8 (-1.57) | 107.6 (-0.1) | 53.522 | 228.765 |
表3 Lamp模型剪枝消融试验Table 3 Ablation experiment on the pruning of the lamp model |
| 模型 | 红熟早期/% | 红熟中期/% | 红熟晚期/% | mAP50/% | FPS | 权重文件大小/MB | 参数量/MB | GFLOPs/GB |
|---|---|---|---|---|---|---|---|---|
| YOLOv10+SegNeXt | 84.6 | 89.5 | 88.4 | 87.5 | 35.8 | 107.6 | 53.5 | 228.7 |
| YOLOv10+SegNeXt +DWConv | 75.4 (-9.2) | 75.0 (-14.5) | 82.2 (-6.2) | 77.5 (-10.0) | 37.7 (+1.9) | 52.2 (-55.5) | 21.1 (-32.4) | 115.2 (-113.5) |
| YOLOv10+SegNeXt +Lamp | 81.4 (-3.2) | 84.3 (-5.2) | 91.9(+3.5) | 85.9 (-1.6) | 66.9 (+23.1) | 40.0 (-67.7) | 19.7 (-33.7) | 114.2 (-114.5) |
表中:括号内数字表示该模型相较于基础模型 YOLOv10 的性能变化量,“+” 表示提升,“-”表示下降。
试验结果表明,在第1组消融试验中,引入轻量级SegNeXt注意力机制后,模型在红熟早期、红熟中期和红熟晚期的识别精度分别提升了5.5、7.7和0.9个百分点,mAP50提高至87.5%,相较原始YOLOv10提升了4.7个百分点,表明注意力机制有助于增强模型对细粒度特征的感知能力。
表中:括号内数字表示该模型相较于基础模型 YOLOv10 的性能变化量;“+” 表示提升;“-”表示下降。
在第2组试验中,为提升模型轻量化程度并兼顾检测性能,试验对比了深度可分离卷积与LAMP通道剪枝策略。结果显示,DWConv虽有效减小了模型体积(权重文件减小至52.2 MB,参数量降至21.1 MB,计算量减少32.4 GFLOPs),但检测精度下降明显,mAP50仅为77.5%。相比之下,LAMP剪枝在进一步压缩模型参数(至19.7 MB)和计算量(降至114.2 GB)的同时,显著提升了推理速度(66.90 FPS,提升23.1%),仍保持较高的检测性能(早期下降3.2%、中期下降5.2%,而晚期成熟果实提升3.5%,平均 mAP50达85.9%),验证了其在模型压缩与性能保持之间的优越权衡能力。
2.3 引入SegNeXt可视化结果对比
引入的SegNeXt模块在保证低计算开销的前提下,有效增强了对复杂背景中成熟度差异细微区域的感知能力,使得模型在不同成熟阶段串番茄目标区分上更具鲁棒性,与基线模型进行可视化对比可以清晰地观察到SegNeXt注意力机制对模型性能的多方面提升(图7)。
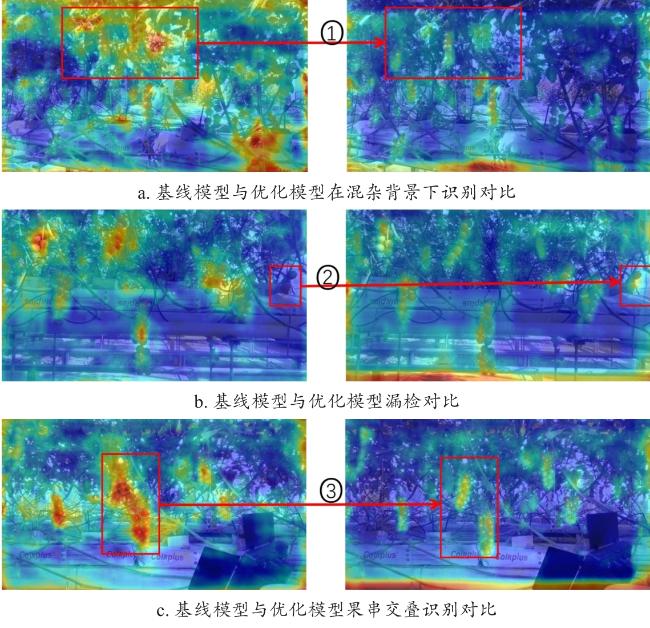
基线模型倾向于将目标识别为较为宽泛的“植物”或“区域异常点”,而引入SegNeXt注意力机制后的模型能够更具体、准确地识别出目标物体的类别(图7),这表明SegNeXt注意力机制有效增强了模型对关键语义特征的提取和判别能力。在检测置信度方面,改进后的模型在红色高置信度区域更集中、范围更大且颜色更深,增加的注意力机制引导模型聚焦于与检测任务最相关的图像区域,抑制了无关背景信息的干扰,提高了模型对串番茄不同成熟度检测结果的准确率。具体而言,在图7区域①中,基线模型虽显示了目标检测结果,但未能准确识别具体物体类别,边界多围绕枝干、叶片及果实,类别划分不明确且未集中于番茄果串,导致结果难以直接解读;优化后的模型则有效聚焦于番茄果串,显著减少了叶片和枝干的干扰。在图7区域②中,基线模型因注意力未能集中于番茄果串,出现漏检现象;而引入SegNeXt注意力机制模型成功避免了此类漏检。在图7区域③中,果串间存在明显粘连,颜色与位置重叠,基线模型可能将多个粘连果串误判为单一目标,影响检测准确性。通过增强对关键特征的关注,优化后的模型更有效地识别并分离粘连果串,降低误判与漏判的概率。
2.4 剪枝试验
为了提升模型的部署效率与推理速度,本研究采用LAMP通道剪枝方法对模型结构进行优化。LAMP剪枝策略通过引导网络自动识别各层通道的重要性,实现通道级别的精细化裁剪。在稀疏训练阶段,采用了LAMP稀疏正则化策略,其主要目的是通过稀疏化模型中的冗余通道参数(图8)提升推理效率并降低计算成本。
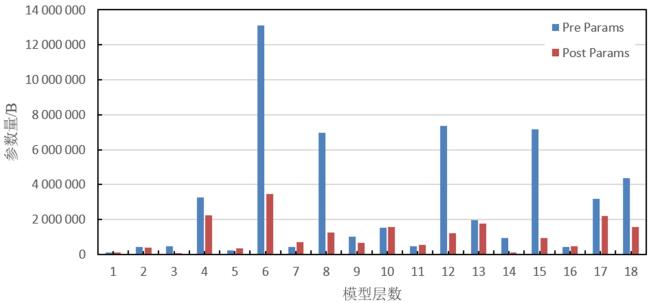
剪枝优化后,模型的计算量由原始的228.765 GFLOPs显著下降至114.252 GFLOPs,计算复杂度降低约50.06%;参数量从53.522 M减少至19.765 M,压缩幅度高达63.07%。在检测性能方面,虽然mAP50略微下降至85.9%,仅减少了1.6%,但考虑模型在推理速度和资源消耗方面的显著提升,该精度损失在串番茄成熟度检测这一应用场景中是可以接受的,尤其适用于资源受限的机器人与边缘计算设备。图8展示了剪枝前后模型各层参数量的变化情况。图8结果显示,大多数网络层在剪枝后均实现了显著的参数压缩,特别是第6层和第7层,参数量分别从约1 300万和700万大幅下降至400万和250万左右,表明模型冗余主要集中在中间特征融合与通道扩展模块中。其余各层也普遍呈现出压缩趋势,说明LAMP策略能够有效识别全网络范围内的重要通道,并在保持整体性能的前提下剔除冗余结构。
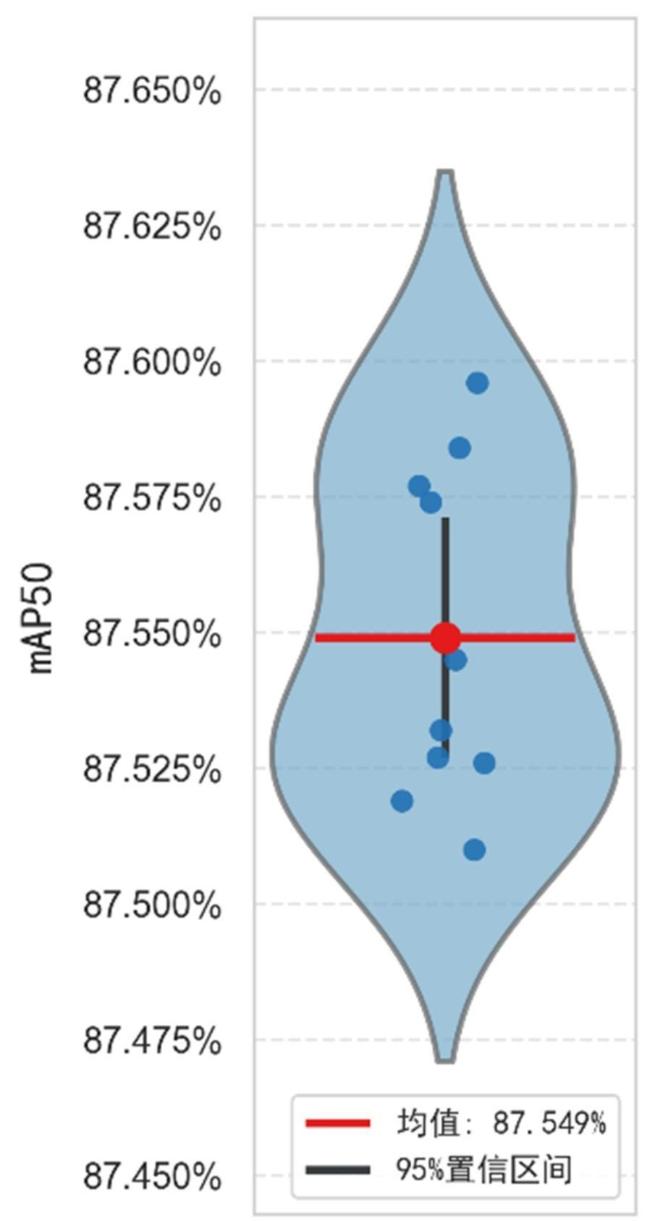
为验证剪枝前后模型性能差异的显著性,对于LampCT-YOLO模型进行了10次独立实验(图9)。其平均mAP50为87.549%,标准差仅约0.031%,表明模型性能非常稳定。95%置信区间为(87.527%,87.571%),区间范围极窄,进一步说明实验结果具有高度可靠性与重复性。
试验结果验证了该方法不仅能够保持较高的检测准确率,还显著提升模型在计算资源受限场景下的部署可行性,展现出良好的实用价值和推广潜力。
2.5 与主流目标检测模型的比较
表4 增加注意力机制后模型与主流目标检测模型比较试验Table 4 Comparison of the attention-enhanced model with mainstream object detection models |
| 模型名称 | mAP50/% | FPS | GFLOPs/G | 模型参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|
| SSD | 77.3 | 43.22 | 37.8 | 21.472 | 91.6 |
| Faster RCNN | 80.7 | 15.75 | 177.3 | 115.684 | 108.3 |
| YOLOv7 | 76.0 | 48.25 | 51.6 | 36.490 | 71.3 |
| YOLO8n | 84.5 | 39.89 | 8.1 | 3.006 | 6.3 |
| YOLO8s | 84.0 | 43.82 | 28.4 | 11.127 | 22.5 |
| YOLO8m | 82.5 | 45.41 | 78.7 | 25.841 | 52.0 |
| YOLO8l | 83.6 | 39.91 | 164.8 | 43.609 | 87.7 |
| YOLO8x | 82.4 | 37.54 | 257.4 | 68.126 | 136.7 |
| YOLOv10n | 82.8 | 43.57 | 6.0 | 2.207 | 5.6 |
| YOLOv10s | 81.9 | 44.49 | 21.4 | 7.219 | 16.5 |
| YOLOv10m | 82.5 | 44.57 | 58.9 | 15.315 | 33.5 |
| YOLOv10l | 82.6 | 37.37 | 228.7 | 53.522 | 107.7 |
| YOLOv10x | 79.0 | 41.60 | 160 | 29.399 | 130.4 |
| YOLOv11n | 85.9 | 43.99 | 6.3 | 2.583 | 5.5 |
| YOLOv11s | 85.3 | 43.12 | 21.3 | 9.414 | 19.2 |
| YOLOv11m | 85.3 | 37.89 | 67.7 | 20.032 | 40.5 |
| YOLOv11l | 85.9 | 37.15 | 194.4 | 56.830 | 114.4 |
| YOLOv11x | 84.0 | 37.21 | 194.4 | 58.362 | 114.4 |
| YOLOv12n | 84.1 | 39.71 | 5.8 | 2.509 | 11.2 |
| YOLOv12s | 82.0 | 40.57 | 19.3 | 9.074 | 18.6 |
| YOLOv12m | 84.6 | 41.98 | 59.5 | 17.579 | 39.7 |
| YOLOv12l | 79.9 | 36.23 | 82.1 | 26.396 | 53.7 |
| YOLOv12x | 81.3 | 33.39 | 184.1 | 59.248 | 119.5 |
| YOLOv10 l + SegNeXt | 87.5 | 66.20 | 114.2 | 19.765 | 40.0 |
根据上述表格可知优化后的模型优于主流YOLO系列模型。精度方面,其mAP50达87.5%,高于所有对比模型,表明在串番茄成熟度检测中改进后的模型具有更强的识别能力。推理速度方面能够达到66.2 FPS,相比其他模型普遍处于30~45 FPS的水平,展现出显著的实时性优势。模型参数量为19.77 MB,权重大小为40.0 MB,保持了良好的部署友好性。综合来看,该模型在精度、速度和规模之间实现了最优权衡,适用于农业场景中的高效部署。
同时,为探究不同版本YOLOv10模型在引入SegNeXt注意力机制与Lamp模块后的性能表现,本研究分别在YOLOv10n与YOLOv10l上进行了对比。结果如表5所示。
表5 YOLOv10不同规模模型在SegNeXt与Lamp模块作用下的检测性能分析Table 5 Detection performance analysis of different YOLOv10 models with SegNeXt and Lamp modules |
| 模型名称 | mAP50/% | FPS | GFLOPs/G | 模型参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|
| YOLOv10n | 82.8 | 43.57 | 6.000 | 2.207 | 5.6 |
| YOLOv10n+ SegNeXt | 85.5 | 41.50 | 8.600 | 2.450 | 6.3 |
| YOLOv10n+ SegNeXt+Lamp | 84.8 | 51.20 | 6.500 | 2.000 | 5.1 |
| YOLOv10l | 82.6 | 37.37 | 106.700 | 45.811 | 107.7 |
| YOLOv10 l + SegNeXt | 87.5 | 35.80 | 228.765 | 53.522 | 107.6 |
| YOLOv10l+ SegNeXt+Lamp | 85.9 | 66.90 | 114.252 | 19.765 | 40.0 |
表5展示了不同版本的YOLOv10模型在引入SegNeXt注意力机制及Lamp模块后性能的对比结果。在nano版本中引入SegNeXt后虽略有精度提升,但整体性能受模型容量限制,提升幅度有限;在进一步引入Lamp模块后,虽然推理速度有所提高,但检测精度出现一定下降。相比之下,large版本在引入SegNeXt注意力机制后精度显著提升(mAP50由82.6%提升至87.5%),表明large版本模型具有更强的特征提取与注意力响应能力。此外,在融合Lamp模块后,large版本在保持较高精度的同时大幅提升了推理速度(FPS由35.80上升至66.90,提升46.49%),验证了本研究提出结构在性能与效率间取得了较好的平衡。
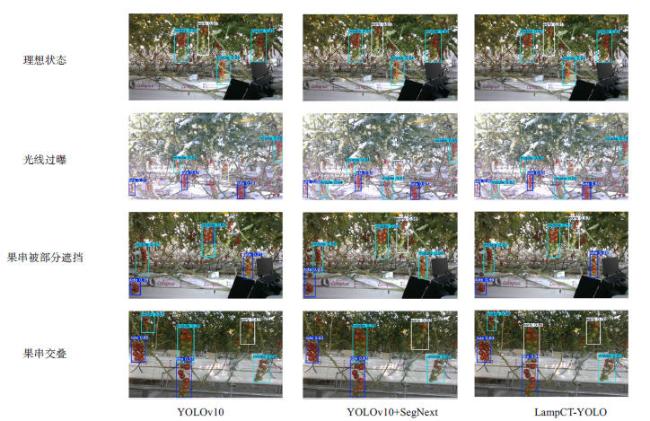
为了进一步验证LampCT-YOLO模型在实际应用中的检测效果,本研究用YOLOv10、YOLOv10增加注意力机制后的模型和LampCT-YOLO模型,在多组不同环境下的番茄图像进行可视化对比,包括理想状态(果串无遮挡,光线均匀,背景简单)、光线过暗过曝(光线Lux值低于30为过暗,光照度Lux值高于1 000为过曝)、果串被部分遮挡(果串被叶片、枝条或其他果串部分遮挡,遮挡率超过10%)、果串交叠(多个果串交叠,果实之间边界不清晰,交叠区域超过10%)等典型场景。通过对比不同模型的检测结果,可以更直观地观察LampCT-YOLO在目标定位精度、漏检率以及边界框鲁棒性方面的优势(图11)。
2.6 果蔬巡检机器人部署
为了推动串番茄成熟度精准快速识别在农业生产中的实际落地应用,本研究将自主研发的轻量化串番茄成熟度检测模型LampCT-YOLO部署至设施果蔬智能巡检机器人中。部署流程分为3个主要阶段如图12所示,包括自主导航至目标位置、开始巡检任务以及现场识别与反馈。巡检机器人通过自主导航系统精确定位,行驶至果园指定起始位置(图12a);机器人启动巡检任务,实时采集周围图像并传输至NVIDIA Jetson AGX Orin进行分析(图12b);经过模型LampCT-YOLO处理,机器人识别不同成熟度的串番茄,并在可视化界面实时显示成熟度及置信度(图12c),直观展示模型在真实温室环境下检测准确性与鲁棒性。本次部署验证了LampCT-YOLO模型在设施果蔬巡检机器人上应用的可行性和高效性。

为验证移动设备的部署对于模型的检测精度的影响,本研究对456串番茄进行成熟度分类检测,检测速度能够达到9.1FPS,将移动端检测结果与人工计数进行了对比,结果如表6所示。
表6 LampCT-YOLO模型部署移动设备检测结果与人工计数的对比Table 6 Comparison Between Mobile Device Detection Results of the LampCT-YOLO Model and Manual Counts |
| 红熟早期/串 | 红熟中期/串 | 红熟晚期/串 | 误检/串 | 漏检/串 | |
|---|---|---|---|---|---|
| 人工计数 | 92 | 70 | 294 | 0 | 0 |
| 设备检测 | 78 | 61 | 248 | 22 | 47 |
从表6中可以看出,移动设备端的检测结果与人工计数总体一致,但存在一定程度的误检与漏检。结果显示,巡检机器人成功识别了红熟早期、红熟中期、红熟晚期串番茄各78串、61串、248串,检测准确率分别为 84.8%、87.1%、84.4%,平均准确率达 85.4%。同时,对于红熟早期、红熟中期、红熟晚期的串番茄分别误检了5串、7串、10串,分别漏检了9串、2串、36串。相比于LampCT-YOLO模型测试得到的mAP50为85.9%,移动端检测精度略有下降(约0.5%)。该差异主要受限于移动设备算力较低、图像采集光照变化以及实时检测过程中的压缩误差等因素。综上,移动设备的部署对模型检测精度影响较小,模型在移动设备端侧仍能保持较高的检测性能与稳定性,具有良好的应用可行性。本研究验证了LampCT-YOLO模型在设施果蔬巡检机器人上应用的可行性和高效性。
3 结 论
本研究针对串番茄果实密集重叠和复杂光照带来的成熟度精准快速检测挑战,提出了融合LAMP通道剪枝与SegNeXt注意力机制的串番茄成熟度轻量化识别模型LampCT-YOLO,该模型有效提升了不同成熟度番茄的识别准确率并降低了模型复杂度,实现在资源受限场景中的有效部署。试验结果显示,LampCT-YOLO通过增强模型对关键目标区域的感知能力,提升识别精度(mAP50为85.9%),通过剪枝技术大幅度压缩模型体积,减少了63.07%的参数量和50.06%的计算量,同时推理速度提升了46.49%,部署于巡检机器人后,提出模型有效平衡了果蔬巡检机器人对实时性与精度的需求,展现出良好的落地推广前景。
剪枝后模型mAP50仍较原模型略有下降(约1.6%)。从类别层面分析可见,早期(下降3.2%)与中期(下降5.2%)果实的识别精度下降更为明显,而晚期成熟果实(提升3.5%)反而略有提升。这表明剪枝在一定程度上削弱了模型对细微颜色变化与边界模糊区域的特征敏感性,尤其是对于颜色渐变不明显的早期和中期果实。为弥补这部分性能损失,考虑可以在剪枝后引入微调训练或知识蒸馏策略,以恢复模型的特征表达能力。
然而,该方法仍存在两点缺陷:一是模型对于光照剧烈变化或果实严重遮挡的极端场景适应性有限;二是针对非红色品种串番茄(成熟后也为青色、黑色、黄色等非红色品种串番茄),不具有普适性。针对复杂环境适应性问题,可引入多模态信息(如融合深度图像或光谱图像)以增强模型对被遮挡果实的补全能力;多模态信息能够提供更丰富的空间和光谱特征,有助于提升模型在复杂环境中的检测鲁棒性和准确性。针对模型对不同颜色品种串番茄的泛化能力,可引入视觉语言模型(Visual-language Model),通过结合图像和文本语义信息,视觉语言模型能够更好地理解“成熟”“未熟”等语义概念,从而提升模型对不同品种、多样外观的串番茄果实的识别能力,实现跨品种、跨场景的鲁棒检测。
综上所述,本研究工作为果蔬成熟度智能识别领域提供了可落地的轻量化目标检测新路径。未来研究可围绕多模态感知融合、结合视觉语言模型来增强模型的语义理解能力等方向展开,进一步推动智能农业在边缘计算平台的普及与应用。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}