



0 引 言
在农学领域,人工量尺获取株高的方法仍是主流手段,尽管该方法操作简单,但在面对大范围田间试验时仍存在工作强度大、效率低下与数据主观性强等问题,严重限制了其在高通量作物监测中的适用性[6]。随着摄影测量和自动控制技术的发展,无人机遥感技术因其灵活性好、机动性强、航行速度快的优点,为田间作物冠层结构的高通量监测提供了可行途径,并在株高表型参数提取中得到广泛应用[7-9]。刘治开等[10]通过无人机搭载高清数码相机获取冬小麦不同生长期的数字表面模型(Digital Surface Model, DSM),与裸土期DSM做差,最终求得作物高度模型(Crop Height Model, CHM),完成作物株高估算。颜安等[11]通过无人机搭载数码相机获取棉花育种区DSM和高清数字正射影像(Digital Orthophoto Model, DOM),利用克里金插值法提取育种区棉花株高并与实测株高进行回归分析,结果表明,提取的棉花株高与实测株高具有良好的拟合性。
尽管基于无人机遥感的株高估算已被广泛应用于作物表型提取中,然而,花生植株低矮且具有匍匐性,冠层发育异质性显著,容易导致基于DSM的株高计算精度下降。针对DSM与数字高程模型(Digital Elevation Model, DEM)之间的空间偏差问题,不少研究在作物株高估算中引入了配准与地形校正方法。例如,Madec等[12]通过将小麦DSM裸地区域与DEM基于地面控制点(Ground Control Points, GCPs)配准,显著降低了高差误差对CHM的影响,其无人机(Unmanned Aerial Vehicle, UAV)与地面雷达株高估算的相关性R 2接近0.96。Fujiwara等[13]在玉米株高反演中结合实时动态差分定位技术(Real-Time Kinematic, RTK)定位与GCP,实现了DSM与DEM的高精度对齐,其计算株高与实测株高R 2最高达到了0.803。Matsuura等[14]结合无人机搭载的单镜头相机与RTK定位系统,提出了一种基于实时立体匹配(Real-time Stereo Matching, RTSM)的作物株高测量方法,该方法在飞行过程中即可完成影像配准与三维点云生成,通过高精度RTK定位消除对GCP的依赖,实现了厘米级的株高估算精度。总体来看,现有株高估算方法为依据RTK、GCP或两者结合的“全局对齐类”方法。需要强调的是,这类研究普遍将配准视为空三层面的前置条件,并未将精配准本身作为提升株高估算精度的核心步骤来解决DSM-DEM残余错配问题。
GCP/RTK空三虽能完成DSM与DEM的初步对齐,但在花生等匍匐、贴地且地形起伏显著的地块,高精度配准仍为限制株高精度的瓶颈。Zheng等[15]对匍匐型生长的作物草莓,以8个周边GCP完成无人机影像的高精度空三与正射,经运动恢复结构(Structure from Motion, SfM)生成DSM,基于无植被区内插构建数字地形模型(Digital Terrain Model, DTM),得到CHM,其中“株高”定义为CHM的P95-P5分位差, 最高仅达到了0.64, 约为4 cm。而He等[16]基于无人机多光谱与纹理特征构建了花生株高估算模型,虽取得了较高的精度( 2=0.91),但其方法是通过影像特征回归实测株高而非直接利用DSM-DEM差分计算CHM提取株高,间接反映出在匍匐型花生作物中基于UAV影像直接测量株高的难度与不稳定性。因此,如何在低矮匍匐作物中进一步提升DSM与DEM的空间对齐精度成为关键问题。虽然迭代最近点(Iterative Closest Point, ICP)等精细配准算法在农作物株高估算中的应用尚不多见,但已有相关研究为其潜力提供了有益启示。Campos等[17]则系统对比了ICP、法向分布变换(Normal Distributions Transform, NDT)等多种算法在森林冠层多源点云配准中的性能,结果表明,这些方法在稳固特征缺乏的农业或林业场景中均表现出较高的对齐精度。这些研究为在农作物DSM与DEM对齐过程中引入ICP等精细配准方法提供了理论与技术参考,为提升株高估算精度奠定了方法学的基础。
针对上述挑战,本研究提出了一种裸地不变量约束的花生株高无人机稳健估算方法。
(1)构建了一种简洁高效且可靠的结合作物掩膜与ICP精配准的花生株高估算流程,与传统GCP及GCP结合ICP株高估算方法进行对比,实现对花生作物的精准株高估算;
(2)基于大疆Mavic 3 M(DJI M3M)和大疆MATRICE 350 RTK(DJI M350 RTK)搭载禅思P1(DJI zenmuse P1)相机验证了两种无人机飞行平台对所提方法估算花生株高的适用性,并解析不同冠层覆盖率及氮素水平对配准精度的影响,为快速、准确的作物长势监测提供技术参考与方法支撑。
1 材料与方法
1.1 研究区与实验设计
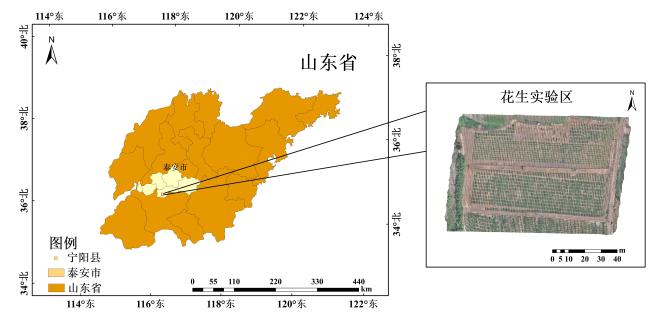
本研究于2024年5月22日—9月22日在中国山东省泰安市宁阳县王卞社区花生实验基地(35°45′40.9″N,116°49′12.5″E,海拔70~200 m)开展田间试验。泰安市属于半湿润温带气候,四季分明,雨热同期。年平均气温15.1 ℃,年平均降水量901.4 mm,年日照时数2 759.1 h,霜期199 d。图1显示了研究区域的位置和分布。试验共选用1 596份已完成基因组重测序的花生种质资源,涵盖花生两大亚种及5个主要变种,且种质来源覆盖全球五大洲,以保证所选种质的代表性。
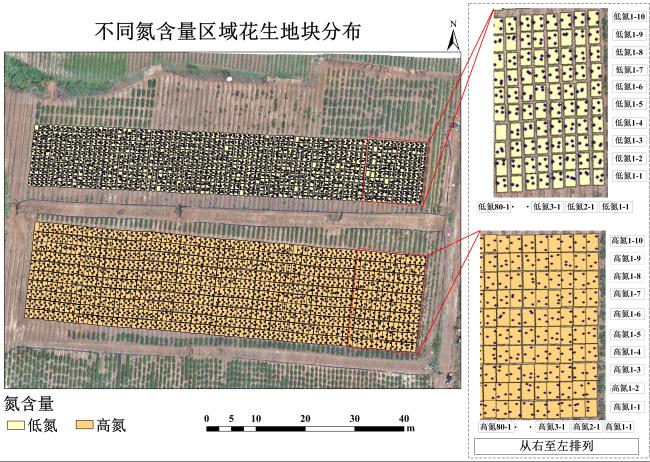
为找出高效氮花生品种,并比较高氮(High Nitrogen, HN)和低氮(Low Nitrogen, LN)花生株高估算特点,试验地分为高氮与低氮两个处理区域,如图2所示。其中高氮处理施氮量为240 kg/hm2,低氮处理为45 kg/hm2。每份种质在试验田内的小区种植20株,株距15 cm,小区之间垄宽100 cm。该试验地共包含从南至北80行,每行10个地块,共计1 596个小区。
1.2 地面数据获取
1.3 无人机影像数据获取与处理
为系统验证不同无人机平台对本研究花生株高估算方法的适用性,本研究以DJI M3M(御3)和DJI MATRICE350 RTK搭载DJI zenmuse P1相机(P1)为平台,开展飞行试验,试验期间花生植株处于典型的冠层快速生长期。
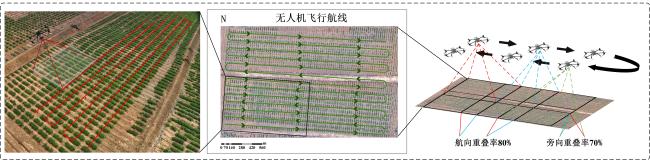
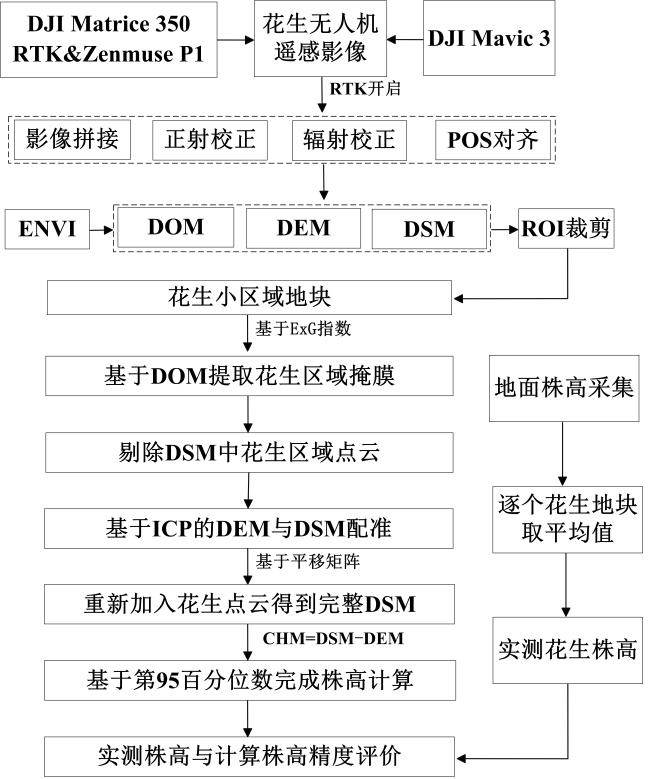
计算植物高度需要1个共同的参考表面,通常使用高精度的DEM。可通过扫描无任何植被的地面点来实现[19]。于2024年5月31日获取试验田原始DEM影像,后分别在42 DAS、49 DAS拍摄。均选择晴朗无云的天气,于10∶00—14∶00进行遥感影像的采集。飞行时御3与P1均按照固定航线飞行,影像采集过程中RTK全程开启,其航线与重叠率如图4所示。御3与P1飞行高度均为12 m,其中御3的分辨率为0.003 6 m,P1分辨率为0.001 6 m。对于同一生育期的影像数据,利用DJI Terra V4.5.0完成影像拼接、正射校正等操作,生成DOM和DSM。最后,使用ENVI 5.3.1软件裁剪出花生地块数据。
1.4 基于DOM、DSM与DEM的花生株高估算
为验证不同无人机平台对本研究花生株高估算方法的适用性,如图5所示,本研究基于不同飞行平台构建了一种基于超绿(Excess Green, ExG)指数,花生区域剔除与ICP校正的ExG-ICP株高估算流程,融合图像分割、点云重建、ICP配准与CHM构建等环节,提取第95百分位数花生株高指标。
1.4.1 基于DOM的花生区域提取与DSM处理
式中: 分别为红、绿、蓝3个通道的通道值; , , 为对应的归一化通道值。
基于上述ExG指数,首先采用固定阈值法对图像进行二值化处理,得到各生育时期的大致花生冠层区域( ),如公式(3) 所示。
式中: 为第 个生育期 为像素位置; 为像素点 在时间点 被识别为花生冠层区域; 为像素点 在时间点 被识别为土壤,其中 =0.10。由于固定阈值法可能受到光照和土壤颜色的影响,因此,本研究使用了大津法(Nobuyuki Otsu)自适应阈值法进一步优化分割效果。Otsu自适应阈值法的核心思想是通过最大化类间方差来确定最优的图像分割阈值。假设图像的灰度值为 ,对应的概率密度为 ,Otsu阈值计算如公式(4) 所示。
为 ,即当前候选阈值; 和 分别是阈值之前和之后的区域概率; 和 分别是阈值之前和之后区域的均值, 为在阈值 下的类间方差。
Otsu自适应阈值法的目标是找到使得 最大的阈值 ,如公式(5) 所示。
而当光照变化或土壤颜色剧烈变化时,固定阈值法和Otsu方法可能无法完全适应环境变化,从而导致误差。因此,本研究进一步引入了基于中位数与绝对中位差(Median Absolute Deviation, MAD)的方法。由于所选生育期的花生尚未完全封行,冠层覆盖率明显不会超过80%,当固定阈值法或Otsu方法生成的掩膜面积过小或过大(冠层区域占总像素的比例小于0.5%或大于90%),通过计算影像数据的中位数和MAD值来估算一个鲁棒的阈值,可以有效抑制噪声和极端值的影响,确保分割效果在极端条件下仍然稳定。其阈值 计算如公式(6) 所示。
式中 为ExG指数影像; 为影像像元值的中位数; 为绝对中位差,其定义如公式(7) 所示。
在此基础上,将DSM中与DOM对应花生区域的像元剔除,仅保留裸土部分,用于后续DEM配准。
1.4.2 裸土DSM与DEM配准
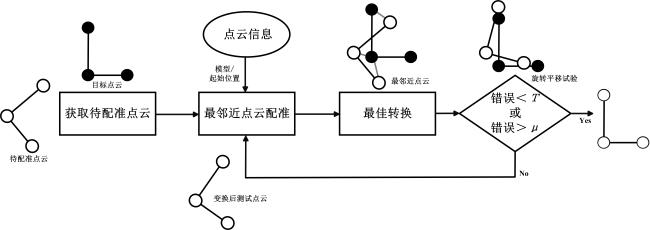
将剔除花生区域后的DSM数据转换为点云,并与裸土期DSM即DEM生成的裸地点云进行空间配准。配准过程中,采用ICP算法进行三维配准,估计并优化X、Y、Z方向的平移量及旋转参数,从而确保DSM与DEM在空间位置和高程基准上的一致性,其ICP配准原理如图6所示。在配准过程中,最大匹配距离阈值为0.5 m。基于0.5 m的阈值能够有效排除误匹配点,确保匹配的稳定性与精度。最大迭代次数为50次以保证大多数场景下的误差收敛,同时避免过多的计算资源浪费。收敛阈值为0.001 m,确保配准精度达到毫米级,避免不必要的迭代,确保结果稳定。
配准完成后,将所得变换矩阵统一应用于花生区域的DSM点云,生成空间对齐后的完整DSM数据。
1.4.3 花生冠层高度模型的计算
为了消除地形起伏对植株高度估算的干扰,本研究采用逐像素差值法构建CHM,具体流程如图5。将不同时期获取的DSM与DEM通过公式(8) 进行像素级相减操作,得到作物冠层在各时相的实际高度分布模型,其中DEM数据选取作物未出苗阶段(裸土期)获取的DSM作为近地面基准面,如公式(8) 所示。
式中: 为不同花生地块。
1.4.4 基于高度直方图模型的花生株高估算
考虑CHM数据中常包含由局部噪声等所导致的极端离群值,本研究采用基于高度直方图模型的花生株高估算方法。对于每个小区,通过逐百分位数株高估算误差分析找出高度直方图的最优百分位数(第95百分位数),该值被用作植物冠层高度的代表值,可有效减少极端离群值对植株高度统计的干扰。最后,利用高度直方图分布的第0百分位数(地面高度)和第95百分位数(主植株高度的上限)计算得到每个小区的代表性花生植株高度。
1.5 精度评价指标
为了评估花生株高估算模型的精度,本研究计算了决定系数(Coefficient of Determination, )、均方根误差(Root Mean Square Error, )、平均绝对误差(Mean Absolute Error, ),以及平均误差(Mean Bias Error, ),如公式(9)~公式(12) 所示。
式中: 为样本总数; 为第 个花生地块的实测株高; 为第 个花生地块的估算株高; 为所有花生地块实测株高的平均值。
2 结果与分析
2.1 花生株高估算阈值与分位点的选择分析
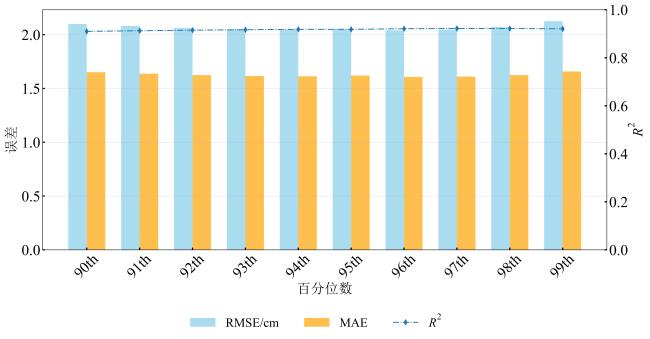
为分析不同ExG阈值对株高估算精度的影响,本研究比较了阈值在0.05、0.10、0.15范围内变化时的全部生育期花生株高估算结果(表1)。结果表明,ExG阈值变化对模型总体精度的影响较小,但在阈值为0.10时表现最佳。此时,御3平台的 达到0.864 7, 最低,为2.57 cm;P1平台在相同阈值下的 为0.918 6, 亦保持在较低水平(2.05 cm)。这表明,当阈值设定为0.10时,分割结果与株高估算的匹配度最高,能够在精度与稳定性之间实现良好的平衡。总体而言,阈值变化对估算结果的影响有限,模型在Otsu自适应阈值及MAD法的阈值选取下均表现出较好的稳健性。
表1 不同阈值对花生株高估算的误差分析Table 1 Error analysis of peanut plant height estimation under different thresholds |
| 飞行平台 | 阈值 | ||
|---|---|---|---|
| 御3 | 0.05 | 0.857 7 | 2.65 |
| 0.10 | 0.864 7 | 2.57 | |
| 0.15 | 0.856 7 | 2.66 | |
| P1 | 0.05 | 0.907 6 | 2.12 |
| 0.10 | 0.918 6 | 2.05 | |
| 0.15 | 0.895 6 | 2.67 |
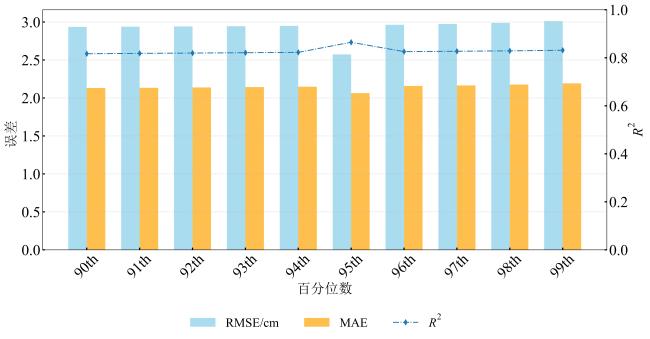
图7 基于御3的花生株高估算不同百分位数与误差对比分析Fig. 7 Comparison of peanut plant height estimation errors at different percentiles based on DJI Mavic 3M |
2.2 不同方法的株高估算误差分析
针对42 DAS、49 DAS的高氮与低氮地块,分别采用基于传统GCP的株高估算方法、GCP结合ICP的株高估算方法,以及本研究提出的方法开展花生株高估算的混合基线对照。其传统GCP株高提取是基于GCP完成多时相DSM影像与裸土期DEM的配准与统一重采样后,采用ArcMap 10.6对各时期DSM与DEM进行逐像素相减并基于第95百分位数完成花生株高计算[25]。GCP结合ICP的方法则是在未经过ExG处理的花生影像数据上,直接应用ICP算法进行点云配准,并基于配准后的数据完成花生株高的估算。在所有方法处理过程中均使用了开启RTK的影像,通过统一的滤波方式和第95百分位数的株高统计方法,确保不同时间和不同数据源的处理方式具有一致性。
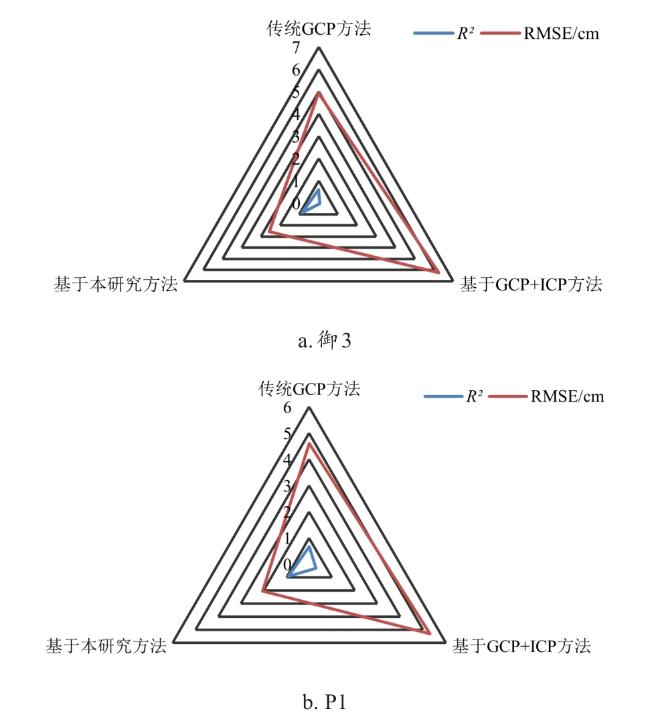
基于以上3种方法针对两平台所有生育期株高分析结果如图9所示,本研究方法在株高估算精度方面表现最佳,两平台RMSE为2.05~2.57,且R 2值为0.864 7~0.918 6,显示出优于其他方法的估算精度。传统GCP方法的估算精度相对较差,R 2为0.592 3~0.669 9,RMSE在4.60~4.94 cm。尽管该方法已被广泛应用,但在本研究中其误差较大且拟合度较低。然而,GCP结合ICP方法的表现最为不理想,R 2均在0.3以下,RMSE最高为6.24 cm。这是由于在未剔除花生区域的情况下,未剔除的花生区域点云数据作为噪声点云对配准过程产生了负面影响,从而导致该方法的估算精度低于传统GCP方法和本研究方法。综上所述,本研究方法在避免了大规模GCP操作所带来的人工成本和处理复杂度的同时,使得其在精度和效率上均具有明显优势。
2.3 株高估算多平台适用性验证
为验证本研究提出的方法在不同无人机平台和多样化试验条件下的适用性,将传统GCP流程与本研究提出的配准方法进行了对比,分析了两者在不同平台花生株高估算中的表现差异。实验结果通过两种飞行平台御3和P1分别进行了验证,并且根据不同的区域对结果进行了分区分析。
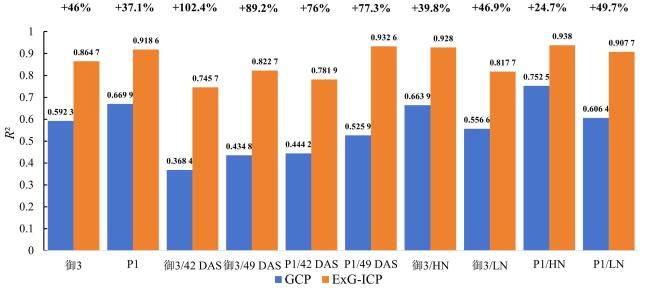
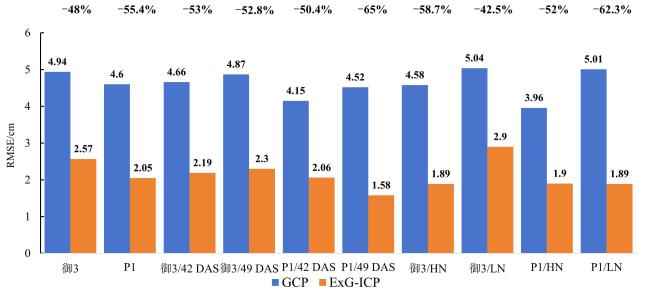
图10与图11结果显示,本研究提出的方法在所有指标情景中均显著优于传统GCP方法,其R 2提升幅度为24.7%~102.4%(平均提升约65%),RMSE降幅则为42.5%~65%(平均降低约54%)。其中,御3在42/49 DAS时期的R²分别由0.368 4与0.434 8提升至0.745 7与0.822 7,P1表现更优,在49 DAS更是取得了R 2=0.932 6的最佳表现。在氮素水平分区中,本研究提出的方法在高氮和低氮区域均稳定提升精度。RMSE则从3.96~5.04 cm分别被压缩至1.90~2.90 cm。综上,本研究提出的方法相较传统GCP方法能在两平台、两时相及不同含氮量上显著提升估算株高与实测株高的相关性,虽然P1平台整体优于御3,但总体在两平台精度均较高,体现出明确的跨平台适用性。
进一步分析表明,P1相较于御3所取得的更高精度不仅源于分辨率与信噪比差异,也与花生冠层三维结构在影像重建中的可表达性密切相关。P1影像具备更高纹理质量,使得高株冠顶区域更加连续,从而在三维重建中形成更完整的冠顶点云,保证了第95百分位数统计的稳定性。而御3受限于较低空间采样率和较弱的纹理保持能力,使DSM在该区域高株冠顶区域表现出更大的几何噪声,进一步影响DSM-DEM差值的准确性,导致高度估算误差偏大。
2.4 冠层覆盖率及氮素水平的株高估算相关性分析
由图12与图13可知,本研究提出的方法在不同生育时期及氮素水平下均表现出较高的精度与一致性。总体来看,株高估算的决定系数R 2随冠层覆盖率及氮素水平的提升显著增加,说明冠层结构发育程度是影响估算精度的关键因素。在P1平台下,49 DAS阶段R 2达0.932 6,RMSE为1.58 cm,而42 DAS阶段R 2为0.781 9,RMSE为2.06 cm。御3平台在49 DAS时R 2为0.822 7,RMSE为2.30 cm,亦优于其42 DAS阶段的R 2与RMSE。该差异反映出冠层覆盖率与株高估算精度呈显著正相关关系,这是因为在49 DAS阶段,花生冠层趋于闭合、叶片重叠增加,使DSM的冠顶点云更连续、重建高度更完整,从而在与裸地DEM差分计算CHM时,减少了由冠顶缺失引起的高度低估。相反,在42 DAS阶段,冠层尚未完全封行,裸地比例较高,DSM在冠层顶部的点云密度较低,易造成CHM局部高度偏低。
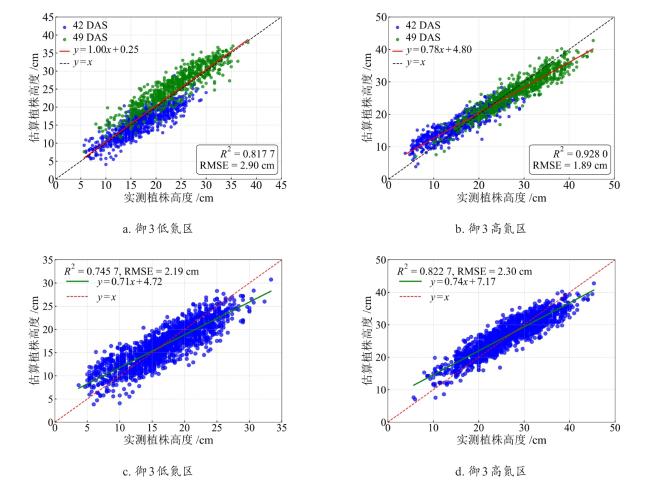
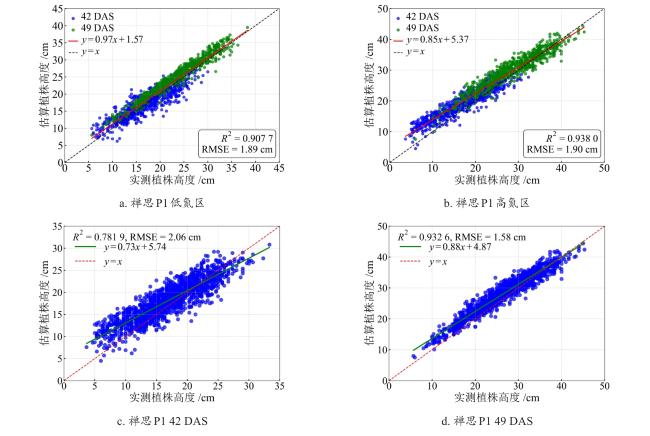
在氮素水平方面,高氮区在两平台下的估算精度普遍优于低氮区。P1平台中,高氮区域R 2为0.938 0,RMSE为1.90 cm,低氮区域R 2为0.907 7,RMSE为1.89 cm;御3平台对应R 2分别为0.928 0与0.817 7,RMSE分别为1.89与2.90 cm。由于本研究的DEM基于剔除花生区的裸地基准构建,氮素水平对配准过程本身影响可忽略,其差异主要源于DSM重建阶段。高氮处理下冠层形态完整且高度一致,DSM点云结构稳定、冠顶定义清晰;而低氮区植株稀疏、局部点云不连续,导致DSM局部压缩及株高轻微低估。
综上,冠层覆盖率与氮素水平共同决定了株高估算的稳定性与精度。较高的覆盖度与高氮供给可增强DSM的几何完整性,从而实现厘米级RMSE的花生株高估算,也验证了本研究方法在多生育期与不同肥力条件下的鲁棒性与可推广性。
3 结论与讨论
3.1 讨论
与需在田间布设大量GCP或依赖RTK的传统株高反演流程相比,本研究方法在精度与适用性上体现出明显优势。一方面,虽然已有研究通过DSM裸地区域与DEM在GCP约束下配准,的确能降低高差误差,例如,陶惠林等[26]基于GCPs的约束利用无人机数码影像生成冬小麦CSM,提取株高并与实测值对比,获得了R 2 = 0.87、RMSE = 6.45 cm的拟合精度,但此类方案对GCPs的数量与布局、外业组织与流程依赖较强,实施成本较高。Xie等[27]以油菜为例系统比较了不同“空间辅助信息”,在有无GCPs条件下的株高反演。在有GCPs的情况下其R 2=0.932,RMSE=2.6 cm;而在没有GCPs时R 2降至0.445,体现了株高估算流程对GCP的强依赖性。Hu等[28]提出自标定(无需大量GCPs)估高方法用于高粱育种;与人工测量相比,最佳方法R 2也只是达到0.63左右,RMSE在7 cm左右,仍显著制约精度上限。也有工作通过RTK与实时立体匹配减少对GCPs的依赖,可达厘米级,但对平台硬件与作业环境的稳定性要求更高。
3.2 结论
本研究所提出的一套裸地不变量约束的花生株高无人机稳健估算流程:基于无人机高分辨率影像DOM通过ExG指数完成花生区域的掩膜,将DSM中对应像素位置上的花生点云剔除后与DEM结合块级ICP精配准。随后,将配准过程中产生的平移量应用至花生点云,完成最终DSM与DEM的配准。通过DSM-DEM生成CHM,最终以P95统计量表征地块株高。多平台(DJI Mavic 3 Multispectral、DJI Matrice 350 RTK搭载Zenmuse P1)、多生育期(42/49 DAS)与不同施氮处理(高氮/低氮)的综合验证表明,该方法与地面实测株高保持高度一致,在42与49 DAS两平台高氮区域R 2为0.928 0~0.938 0,RMSE最高仅为1.90 cm;低氮区域R 2则为0.817 7~0.907 7,RMSE最高为2.90 cm,误差差异较小,显示出对田间肥力背景的稳定适用性,并表明该方法在不同无人机平台的适用性。总体上,相较于基于传统GCP的株高获取方法其R 2提高0.3~0.5,而RMSE降低约50%。综合以上证据,本研究方法在跨平台、跨时期与跨施氮条件下均实现厘米级株高反演精度,具备在育种筛选与田间监测中的工程可用性。
尽管如此,本研究仍存在局限:一是研究区域与季节相对集中,跨气候/跨土壤/跨栽培模式的泛化性尚需进一步验证;二是花生生长后期冠层密集,地面点较少所导致的配准误差。为此未来将开展跨区域—跨年份的适应性评估与域自适应校正,提升模型外推能力;同时将探索无人机平台在不同飞行参数如旁向重叠度、航向重叠度、飞行高度、镜头角度等情况下的最优花生株高估算飞行参数,为田间管理与处方决策提供可靠依据,支撑高通量表型与精准管理的长期连续监测。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}