



1 引言
然而,在上述的农情监测无人机系统应用中,一部分直接采用了大疆公司生产的Phantom系列等消费级航拍无人机来执行农情监测作业。以Phantom 4为例,其较低的图像分辨率以及图像畸变的影响使得该系统无法满足实际作业的需求。另一部分则存在任务设备与飞行器未完全整合的问题,飞机平台通常直接采用市场上已有的产品,如大疆公司的M600, S1000+多旋翼无人机。这种飞机的飞行控制系统无法与自行集成的任务设备进行信息交互,可能会造成如飞机已经飞离目标位置,任务设备却未能完成图像信息采集作业的情况,从而影响作业精度与效率。为进一步提升飞机与任务设备之间的工作协调性,本研究基于自行设计优化的飞控系统,开发了一套用于农情监测的八旋翼无人机系统,以飞控系统为核心,同时协调飞机飞行与任务设备作业,并对其在可见光波段下的农田正射遥感图像的采集进行了应用性能的评估。
2 系统概述
2.1 飞行器
飞行器是农情监测无人机系统的主要任务执行机构 。飞行器的系统组成如图1 所示[9]。
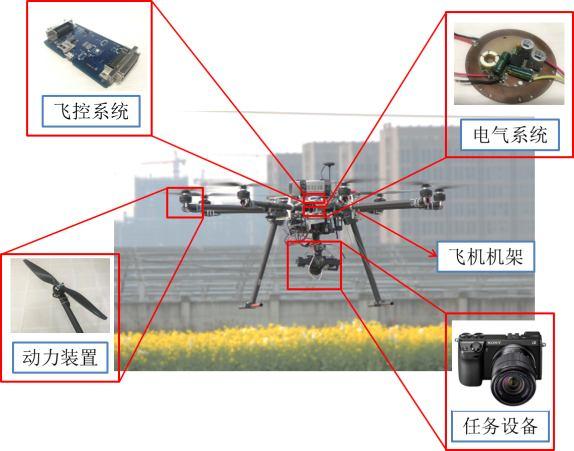
2.1.1 飞机机架与动力装置
常用的多旋翼机架架构有四旋翼架构、六旋翼架构和八旋翼架构。与前两者相比,八旋翼架构的主要优点在于动力系统故障冗余足,安全性好,主要体现在当八旋翼无人机中的一个旋翼因为故障停转后,飞机依然能够维持较为稳定的飞行姿态完成飞行任务。因此本研究中,飞行器采用了如图2 所示的八旋翼I型机架[10]。
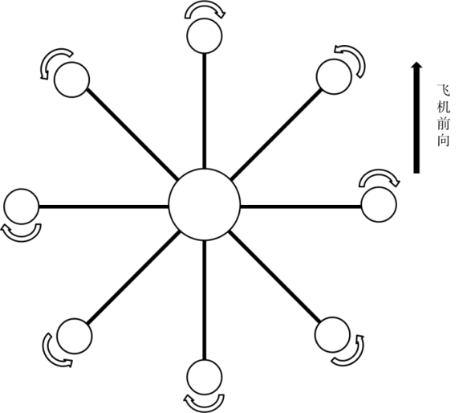
在图2 所示的机架中,机臂和飞行器中心板采用碳纤维复合材料,各种支撑用零部件,如电机支撑座,机臂固定环等采用铝合金材料。8个动力电机围绕飞行器中心板均匀对称地分布在8个方向上,相邻电机转向相反,用以平衡各个电机旋转时产生的力矩。电机上方安装有可快速拆卸碳纤维桨叶,在农田作业环境中能实现桨叶的快速拆卸以及检修更换。飞控系统通过实时控制8个电机的转速变化实现控制飞机的姿态与飞行动作[11]。
飞行器前向与机臂重合。飞控系统布置在飞行器中心板顶板的中心位,底部设计有四个减震球组成的减震装置,以减小飞行器震动对飞控系统的影响[12]。任务设备与飞行器刚性连接,固定于中心板正下方,从而形成一套完整的无人机系统。
2.1.2 飞控系统
在飞行器中,飞控系统的主要功能是控制飞行器姿态的稳定、管理无人机飞行和任务设备以及无人机应急处置等。其中,飞控系统的核心部件—飞控计算机主要由STM32F427芯片构成。飞控系统架构如图3 所示。
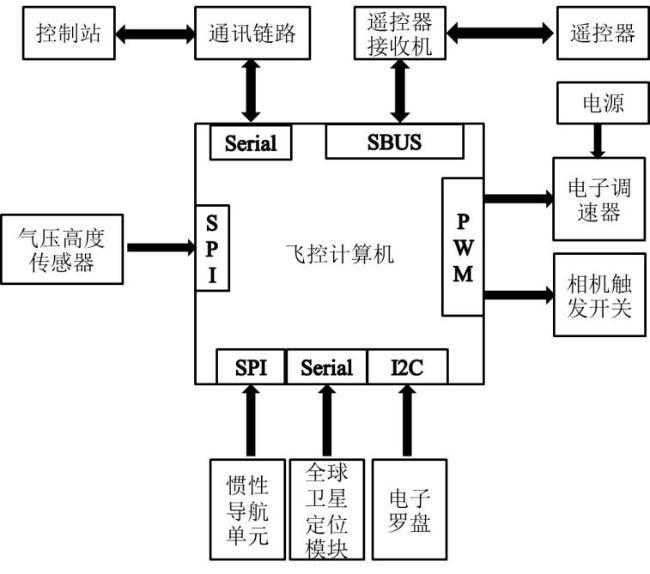
飞控系统中的传感器元件包括全球卫星定位模块、惯性导航单元、电子罗盘和气压高度传感器。
全球卫星定位模块采用NEO-M8N模块,在铝合金支架的支撑下,布置于高于飞行器中心板顶板10cm处,以获得良好的卫星定位信号。定位模块可同时接收GPS卫星信号和GLONASS卫星信号,最多可接收到20颗以上卫星的定位信号,并利用串口将数据传回飞控计算机。飞控系统可支持2个全球卫星定位模块同时输入数据,在一个模块失效的情况下,另一模块可以随时代替工作,提高飞行的安全性。
此外,飞控系统板提供了13路PWM输出接口、4路TTL串口、1路I2C接口、1路SPI接口和1路CAN总线接口。除GPS模块需要单独拉高以获得良好的信号环境以外,飞控计算机与导航系统所需的各种传感器集成于同一块电路板上,前后采用2组带固定螺钉的伺服连接器与其他必要的元器件连接,可靠性更好,集成度高,并且能实现系统板的整体替换,便于田间维修。
2.1.3 电气系统
电气系统主要包括用电器、电源和配电系统。在电源选择方面,锂聚合物电池由于目前质能比高,安全性好,被广泛应用于多旋翼无人机中。而由于飞机需要搭载的载荷重量较大,所以选择标称电压为22.2V的电池进行供电。飞行器采用的供电电源参数如表1 所示。
表1 供电电源参数Table 1 Parameter of battery |
| 参数 | 内容 |
|---|---|
| 电池类型 | 锂聚合物电池 |
| 标准电压(V) | 22.2 |
| 充满电时电池电压(V) | 25.2 |
| 电池容量(mAh) | 16000 |
| 充电电流(A) | 16~32 |
由于飞控系统的工作电压为5V,且各个电子调速器需要电池以20V以上的电压直接供电,所以配电系统将电池供电分为两路,一路将电压降低至5V供飞控系统和其他外部设备使用,另一路直接供应给8个电机使用,以保证飞行器的正常工作。
2.1.4 农情采集任务设备
选用索尼公司生产的Nex-7相机(Sony corporation, Japan)采集农田图像信息,可采集可见光波段下的图像数据,分辨率为6000×4000px。在使用25mm焦距镜头的条件下,从距离地面25m的高度采集图像数据,其正射影的地面分辨率可达到0.39cm。
相机安装在三轴无刷电机自稳云台上。惯性导航单元布置云台上,可以实时采集相机的姿态数据。云台控制系统对接收到的姿态数据进行计算后发出信号控制各轴电机,从而使相机光轴在飞行器姿态调整的过程中尽可能保持垂直于地面[16]。
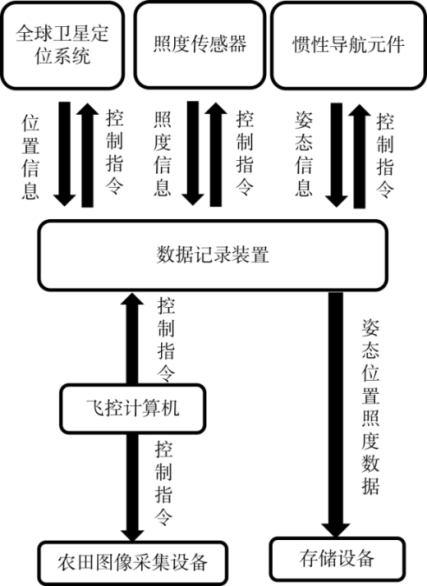
相机触发信号由相机内部电路板引出,与飞控系统的控制开关相连。当飞行器输出的PWM信号占空比高于一定值时,开关两端短接,相机快门被触发并采集单帧图像数据,从而实现由飞控计算机直接控制任务设备,使得飞机与任务设备协调工作。同时触发的还有为Nex-7相机配套设计的相机位置与姿态采集装置(Position and Orientation System,POS)和照度传感器[17],前者主要集成了全球卫星定位模块、惯性导航单元、电子罗盘和气压传感器,后者则主要实现实时获取环境光照强度信息。当飞行器到达拍摄点,飞控系统发出信号触发相机时,上述两个装置同时被触发,记录下飞行器当前的经纬度坐标、飞行高度、拍摄照片时的环境光照强度以及相机拍摄时云台的俯仰角(Pitch)、横滚角(Roll)和航向角(Yaw)等信息,并与飞行器本身实时记录的触发相机时的飞行数据能够进行逐一对应分析,以供后期遥感图像的处理。
与市面上常用的大疆公司的Phantom系列等消费级航拍无人机相比,该无人机系统的任务设备能够在提供图像信息的同时提供图像的地理位置信息和照度信息,便于后期生成精准的作业处方图,指导农民根据地理位置来执行精细农业作业。任务设备采用独立电源进行供电,防止云台故障影响飞行器正常飞行,其系统架构如图4 所示。
2.2 控制站与通讯链路设计
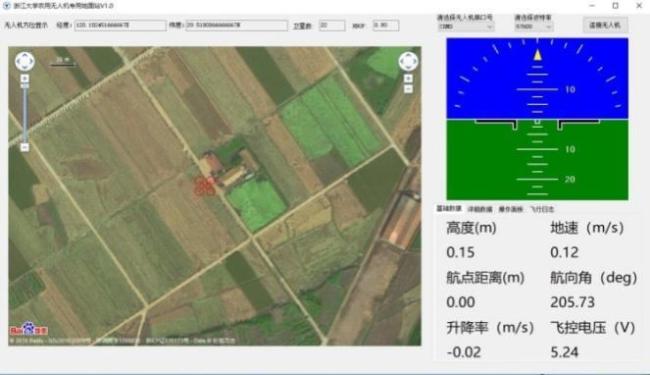
在农情监测系统中,控制站与通讯链路结合,形成了一套对于飞行器的远程监测与控制体系。通讯链路采用了一对X-tend无线传输模块。控制站中则包括了一套独立的手动遥控器,遥控器可以通过向飞控计算机发送控制信号手动操控飞行器的前进、后退、自转、侧移等基本动作。另外,控制站还包括了一台与通讯链路设备相连的便携式计算机。在计算机上预先规划好任务航线上传后,飞行器也可以在自动飞行模式下,执行全自动飞行巡航任务。飞行器通过通讯链路按照MAVlink协议[18]实时发回的数据经过解析后显示在屏幕上,如图5 所示。
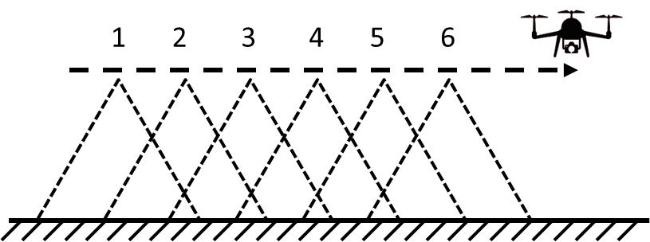
在自动工作模式中(如图6 所示),控制站根据飞行高度、相机焦距、传感器大小等参数计算出单张图像能覆盖的区域尺寸,之后再根据事先设定的相邻两张图像的航向重叠率与旁向重叠率,自动计算出拟触发相机采集图像的飞行器经纬度坐标,生成飞行路径并通过通讯链路上传至飞控系统。在实际作业中,航向重叠率需要在60%以上,旁向重叠率要在30%以上[19]。飞控系统控制飞机按图上的顺序到达指定位置后依次发出控制信号控制任务设备进行工作,从而实现任务设备与飞机之间的协调工作。
3 性能测试方案
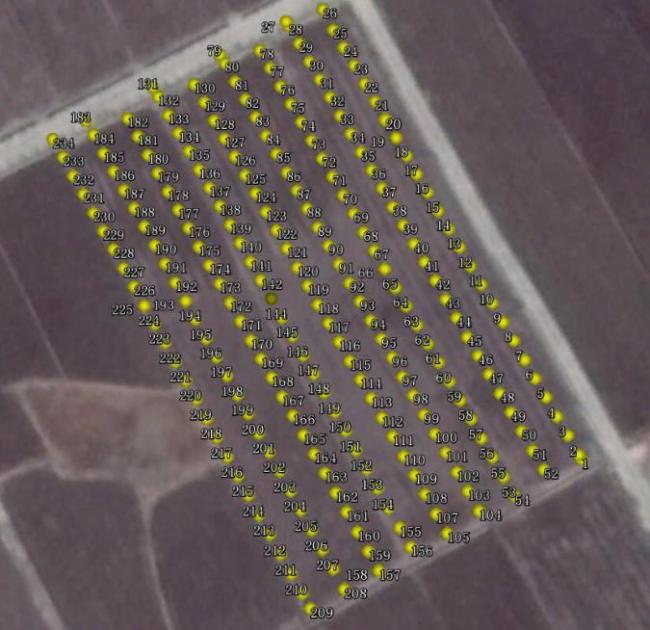
飞行器的飞行性能和任务完成质量是评价无人机农情监测系统性能的重要指标。因此,课题组选取浙江省诸暨市一块长方形油菜田(起飞点坐标:东经120°6'9.14"、北纬29°31'4.54")进行了6次无人机系统飞行测试,其飞行高度为25m,飞行速度2.5m/s,飞机为自动航行模式,并设计航拍点,设置航向重叠率75%,旁向重叠率为60%。单次飞行计划拍摄229张航片。
在飞行结束后,收集飞控系统实时记录的飞行数据和POS装置生成的照片拍摄云台位置与姿态数据,就可以分析得到农情监测系统工作的飞机姿态与云台姿态的稳定性、实际拍摄位置精确度以及是否漏拍重拍等信息。单次巡航飞行计划如图7 所示,图中在农田内部的黄色坐标点为设定拍摄的飞行器位置。
4 结果与讨论
4.1 云台稳定效果测试
在飞行过程中,飞行器的飞行姿态会时刻变化。由于多旋翼无人机在飞行过程中需要对抗外部风场以及空气阻力的干扰,其飞行姿态相对于水平面通常都是呈一定角度倾斜,且会随着外部环境的变化而实时调整。由于相机拍摄对于姿态稳定性有一定要求,所以在该无人机系统中设计了自稳云台来维持相机拍摄角度的稳定。
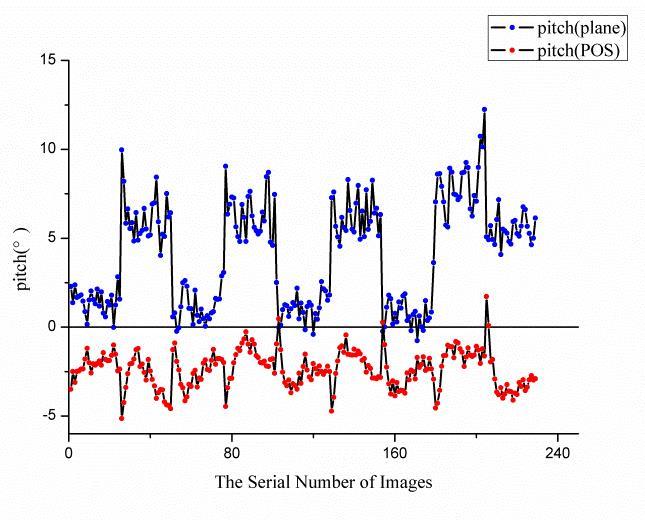
描述飞行器与水平面以及相机与水平面之间的倾斜姿态主要有两个指标:俯仰角(Pitch)和横滚角(Roll)。正值俯仰角表示飞行器或相机以水平面为起点绕横轴沿顺时针方向旋转,反之则为负。正值横滚角表示飞行器或相机以水平面为起点绕飞行器纵轴顺时针方向旋转,反之则为负。以第1次巡航试验飞行数据结果为例,通过读取飞行器的俯仰角的分布与相机搭载的POS装置记录的相机俯仰角的分布,绘制如图8 所示的俯仰角波动对比图。
在第1次巡航试验中,飞行器的横滚角与POS装置记录的相机横滚角的对比分布如图9 所示。
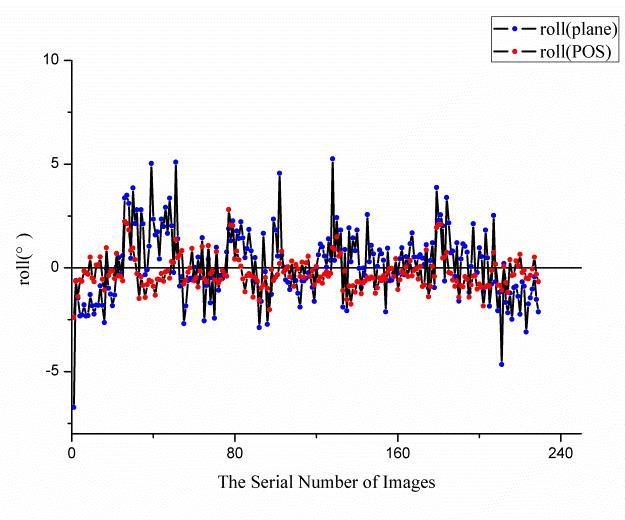
经过对图8 和图9 数据分析得出,飞行器在飞行航点采集图像的过程中,飞行器俯仰角以及横滚角的波动范围远大于云台的俯仰角与横滚角波动范围,将6次实验的数据进行分析可以得到如表2 结果。
表2 相机与飞机姿态对比结果Table 2 Comparison results of camera and UAV attitude |
| 试验编号 | 相机俯仰角标准偏差(°) | 飞机俯仰角标准偏差(°) | 相机横滚角标准偏差(°) | 飞机横滚角标准偏差(°) |
|---|---|---|---|---|
| 1 | 1.30 | 3.36 | 0.81 | 2.21 |
| 2 | 1.07 | 2.86 | 0.72 | 2.06 |
| 3 | 0.96 | 3.33 | 0.79 | 2.28 |
| 4 | 0.98 | 3.00 | 0.79 | 1.34 |
| 5 | 1.11 | 3.06 | 0.72 | 2.16 |
| 6 | 0.98 | 3.00 | 0.79 | 1.34 |
综上所述,由上表可知,在飞机拍摄图片期间云台俯仰角与横滚角的变化剧烈程度明显小于飞机的俯仰角与横滚角的变化剧烈程度。这表明与直接将相机与飞机绑定的系统集成方式相比,将相机安装在自稳云台上使得相机在多旋翼飞机抵抗外部干扰和调整飞机姿态的过程中能以更稳定的姿态采集地面农情信息,便于后期对遥感图像进行处理与分析。
4.2 飞行器实际拍摄位置与计划位置偏差
无人机采用的全球卫星定位模块在静止的情况下,输出的经纬度坐标位置会在半径数米内的圆内随机波动[20]。因此,为了保证飞行器能够正常进入拍摄点进行拍摄,飞控系统在执行飞行计划时并不需要飞行器准确到达拍摄点才触发相机,而是当飞行器进入了以预先设定的拍照点为圆心、一定半径的圆形区域范围内即会触发相机快门。所以,相机实际触发位置与计划触发位置之间的偏差可以用于评估无人机农情监测系统的任务完成质量。在6次巡航飞行中,将计划中飞控系统发出触发信号的经纬度坐标点与飞行器记录的实际触发的坐标点投影到同一地图坐标系上。以坐标点东经120°6'3.72",北纬29°31'3.58"为原点,南北方向为纵轴(北向为正)、东西方向为横轴(东向为正)建立直角坐标系。当坐标变化范围在不超过±1'的情况下可以根据如下的公式计算其在直角坐标系的坐标值[21]。
x-x0=Kx (Lon -Lon0)
y-y0=Ky (Lat -Lat0)
其中,x0与y0为直角坐标系原点横坐标和纵坐标,设定为0,m;Lon为待计算点的经度值,rad; Lon0为原点的经度值(东经为正,西经为负),rad;Lat0为待计算点的纬度值,rad; 为原点的纬度值(北纬为正,南纬为负),rad。另外,kx与ky的计算公式如公式(3)和(4)所示[21]:
$K_{x}=\frac{acos(Lat_{0})}{[1-e^{2}sin^{{2}}(Lat_{0})]^{0.5}}$
$K_{x}=\frac{a(1-e^{2})}{[1-e^{2}sin^{2}(Lat_{0})]^{0.5}}$
其中,a为地球赤道半径,6378153m;b为地球极半径,6356750m。e的计算公式如(5)所示[21]:
$e =\sqrt{1-\frac{b^{2}}{a^{2}}}$
计算得到的在直角坐标系下的分布如图10 所示:
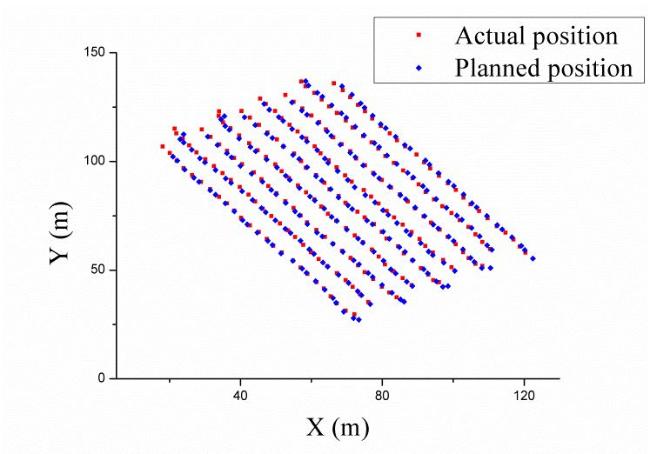
在图10 中,蓝色点代表飞控系统发出指令控制相机的采集图像的坐标点,红色点代表实际采集图像的坐标点。从中我们可以看出,飞控系统控制拍照的位置与实际相机拍摄的位置基本吻合。以第1次飞机巡航试验为例,计算上述两个位置相差的距离可以得到如图11 所示的曲线。
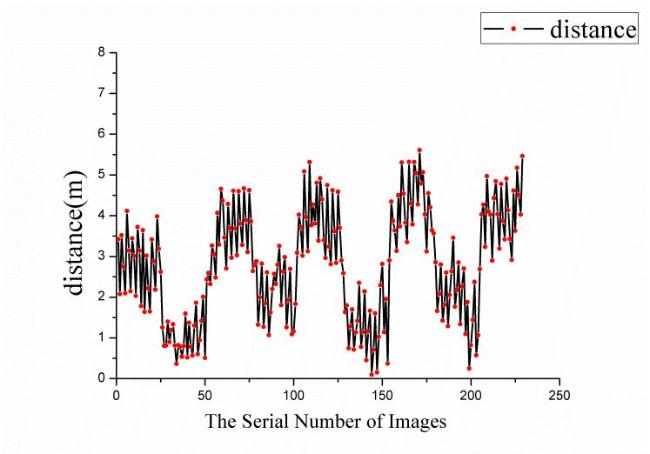
经计算得到在6次试验中,任务设备实际拍摄位置与飞控系统向任务设备发送指令的位置距离偏差如表3 所示。
表3 位置偏差对比结果Table 3 Comparison of distance between planned waypoints and actual waypoints |
| 试验编号 | 偏差距离平均值(m) |
|---|---|
| 1 | 2.77 |
| 2 | 2.59 |
| 3 | 2.92 |
| 4 | 1.47 |
| 5 | 2.30 |
| 6 | 2.15 |
经由上表可以看出,飞机在6次自动巡航测试中,飞机实际拍照位置与飞控系统发出信号的位置偏差平均值在3m左右,基本满足农业作业的实际需求。
4.3 图像拼接

5 结论
通过长期产品试制与试验,最终搭建了一套用于农情监测的多旋翼无人机系统。经过测试和使用对比,得出如下的结论:
(1)通过分析6次平行试验中飞行器与相机在采集图像时的姿态信息可以发现,在飞行器自动巡航飞行抵抗风力和调整倾角的过程中,相机的俯仰角与横滚角的标准偏差明显小于飞行器的标准偏差。这说明了与直接将相机与飞机绑定的系统集成方式相比,将相机安装在自稳云台上能够使相机以更稳定的姿态采集地面农情信息,便于后期对遥感图像进行处理与分析,满足了实际农情监测需求。
(2)飞行器在6次飞行试验过程中,实际拍摄张数与设定的拍摄张数一致,实际拍摄位置与计划拍摄位置距离偏差基本符合农田作业的需求。导入到Agisoft Photoscan软件中,经过后期图像拼接与校正,系统获得了在可见光波段下农田整体正射影图像,说明该系统已经实现了根据设定飞行路径自主飞行采集农田图像的功能,满足了实际的作业需要。
(3)经与市面上类似规格的商用无人机改装的农用无人机系统进行对比,本款飞机的飞控系统集成度高,可靠性好。以飞控系统为核心,该系统实现了飞机飞行和任务设备的协同控制。飞控系统与任务设备在工作过程中同时采集所有传感器数据,为分析农情提供更加完善的数据保障。此外,该系统有更多的开放接口,为进一步安装更多农用任务设备与飞机导航设备提供了空间。在实际应用中,操作者可以使用一架飞机迅速更换不同的任务设备开展作业,作业效率更高。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}