



1 引言
在信息技术的推动下,现代航空技术迅速发展,尤其是无人机相关技术和应用成爆发态势,从军事打击和战场侦查,到工业现场电力自动巡检和交通执法,再到日常农业植保施药和摄影娱乐,无人机系统已广泛应用于生产生活的各个领域。农业航空应用是现代农业的重要组成部分和反映农业现代化水平的重要标志。与欧美发达国家相比,我国农业航空技术起步较晚,但通过近年来的高速发展,目前中国农业航空已经由最初的有人驾驶航空器作业为主发展到有人驾驶和无人驾驶航空器作业并存的局面,尤其是无人机植保作业规模、面积已位居世界前列[1,2,3]。植保无人机可集成智能飞控系统、复合光电吊舱、精准变量喷施设备等多种新型任务载荷,对作物进行遥感信息获取和定量定点精准施药,同时利用自身旋翼下洗风场特性,加速雾滴沉积到作物冠层表面,具有复杂地形适应性强、作业效率高、施药穿透性好的优势[4,5]。2014年,在美国麻省理工学院发布的《MIT技术评论》中,将农业无人机技术作为第一位,列为年度十大突破性科技创新技术。农业农村部2015年2月印发了《到2020年化肥使用量零增长行动方案》和《到2020年农药使用量零增长行动方案》,明确提出了“精准施肥减量”的要求,进一步推动了以无人机植保为代表的超低量作业模式的发展。
农业植保无人机系统由无人机飞行平台、航空喷洒作业设备、作业管理与监控系统组成,是涉及到航空飞行器、信息技术、流体力学、农业植保等多技术领域交叉融合的复杂作业系统。无人机植保作业面临非常复杂的环境条件,一方面其超低空作业,地面构筑物和农田基本水电设施的会影响其飞行安全;另一方面植保作业实效性强,需要在规定的时间段将药剂喷洒至作物特定的部位,才能保证较好的施药效果。针上述作业技术需求,科研人员在非结构化条件下的环境实时感知、基于作物病虫害智能识别的智能作业决策方法、基于风场雾滴沉积模型的变量对靶施药控制、以及基于数据的作业评价领域投入了大量研究,将人工智能技术、并行计算技术以及智能硬件等方面取得的突破性方法和技术手段,引入到农业航空作业应用中,使无人机植保技术向着智能化、系统化、精准化方向发展。
本研究从农情遥感探测、作业过程优化控制、施药效果监管评估三部分对智能化农业无人机技术发展研究现状进行论述,总结了近年来农业无人机领域代表性技术成果,同时对未来智能农业无人机技术发展趋势进行了分析预测。
2 作业环境及对象感知探测
2.1 前端作物长势信息智能探测
2.1.1 多光谱传感器获取的作物长势信息
采用微小型无人机搭载多种传感器遥感信息平台获取农田作物信息,具有运行成本低、灵活性高以及获取数据时效性高等特点。
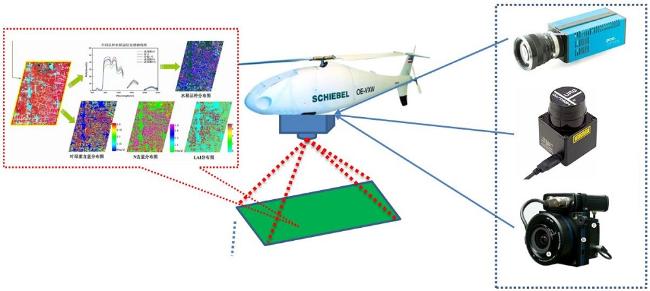
日本长崎大学学者谷口等[6]采用小无人机搭载5波段近红外相机和可见光相机对稻米梯田进行低空遥感影像采集,获取了植被覆盖指数(Normalized Difference Vegetation Index,NDVI)数据和水蒸发量之间的相互关系。杨贵军等[7,8,9,10]利用光谱辐射仪和成像光谱仪在冬小麦试验田进行空地联合试验,基于获取的孕穗期、开花期以及灌浆期地面数据和无人机高光谱遥感数据,实现了估测冬小麦叶面积指数(Leaf Area Index,LAI);同时基于无人机搭载的多传感器平台开发了作物表型信息获取装备,对作物表型特征快速采集和解析,反演作物NDVI、株高、叶绿素含量、病害易感性、干旱胁迫敏感性、含氮量、产量等关键信息。Patrick等[11]利用植物反射的可见光和近红外光来研究花生健康状况,运用无人机遥感方式采集了20种不同基因类型花生的番茄斑萎病的表型特征,通过对比地面调查获得的发病率真值,依据作物表型光谱图像特征构造植被指数,建立被感染情况的评估模型,进而确定疾病检测的最佳植被指数和图像分布特征。Albetis等[12]利用无人机搭载多光谱传感器,对葡萄黄体病发病的藤蔓进行识别,采用单变量和多变量聚类算法,有效识别发病的红葡萄藤,通过并剪除发病藤蔓,避免病体扩散。在向日葵种植区域杂草识别中,小型无人机可搭载多光谱传感器和相机,快速获取小区内种苗和杂草的图像,利用图像处理技术对各种杂草分布情况进行估计,为在向日葵生长早期进行杂草清除提供依据[13]。通过上述研究发现,对多光谱传感器图像的解析,可精准获得作物病害在某些光谱段上的量化特征参数,为作物病害识别提供精准的监测手段。
2.1.2 基于深度学习的遥感影像处理
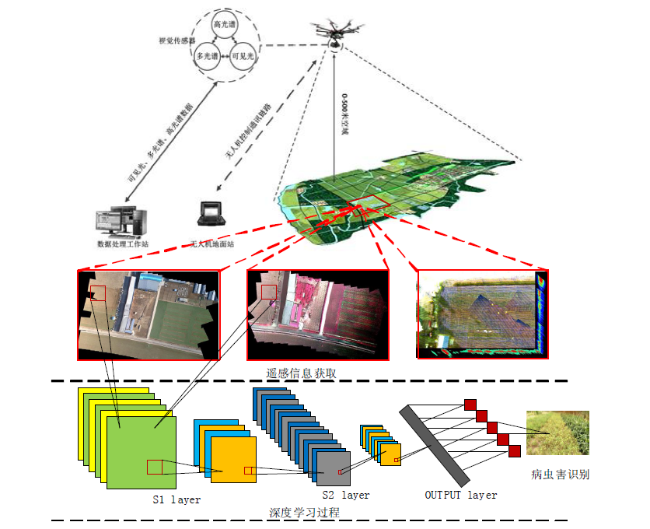
农业遥感信息处理主要集中在对获取图像信息的反演,因此,基于深度学习的人工智能模式识别技术也在农业遥感信息处理领域表现出巨大潜力。将传统的随机森林分类算法和基于卷积神经网络的深度学习方法用于卫星影像处理,对比其结果显示,在存在云雾干扰的情况下,深度学习方法对玉米、大豆等作物的分类识别能力远高于传统随机森林方法[14]。过去统计树上的果实会耗费大量的人力,但是采用深度学习的图像识别算法,可快速对桔子、苹果的产量进行统计,同时通过基于果实形态特征的识别可快速识别出果实缺陷,实现按品质智能分类[15]。针对受红脂大小蠹危害的油松林,孙钰等[16]用无人机获取遥感影像图片,训练精简的SSD300目标检测框架,即可直接识别无人机航片,无需校正拼接,降低模型的参数数量和运算量,加快检测速度。基于深度学习的图像处理颠覆了传统图像聚类方法,将农业遥感技术人员从图像算法研究转向对田间信息样本的采集和积累,最大限度的发挥了农业信息化过程中遥感大数据样本作用。
2.2 农田环境的动态感知
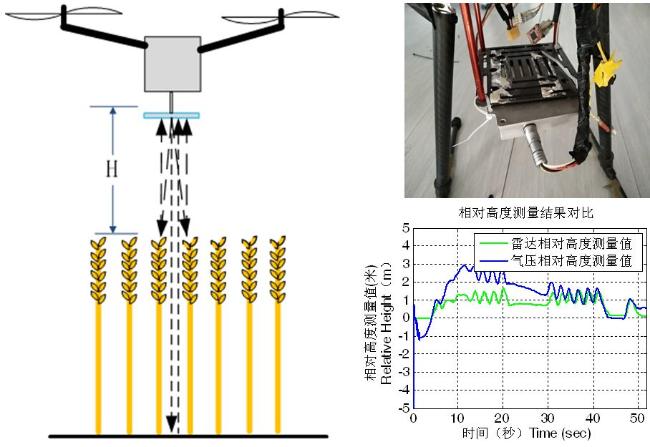
农田作业环境是极其复杂的非结构化地表区域,作物本身、农田水利设施、构筑物交错并存,且经常发生相对位置变化。要实现自主对靶和安全作业,需要解决无人机和作物冠层相对位置、以及无人机和田间各种障碍物相对位置的实时获取的问题。应用智能化的光电探测和模式识别手段获得环境中各种非作业目标的基本尺度特征、类型属性等关键信息,对环境中各种对象的静态特征和动态运动趋势进行在线观测可解决上述问题,因此,面向田间作业环境的感知技术已成为农业无人机自主作业的必要条件[17]。基于机器视觉和多传感器融合的智能模式识别方法,为此类应用需求提供了有效的解决途径。在丘陵或地形起伏区域,作物冠层与无人机的相对高度信息对作业效果和飞行安全至关重要,采用新型微波雷达传感器和气压高度计、GNSS、惯性测量单元等多传感器融合方式,可以有效地测量无人机机体相对地面及作物冠层的高度,实现仿地跟踪飞行[18],如图3 所示。
2.2.1 激光雷达对环境信息进行SLAM感知
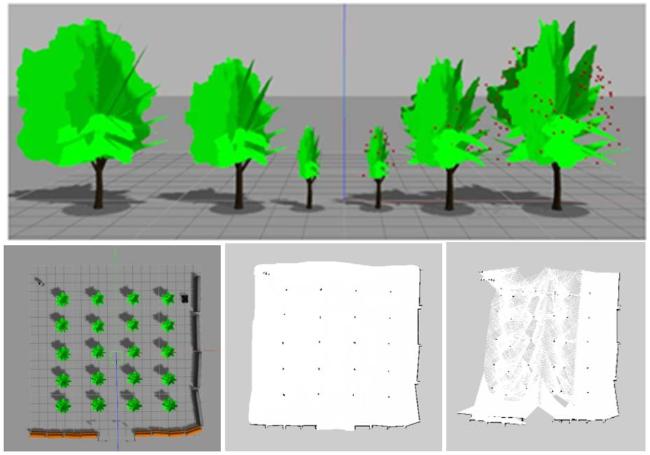
为了获得更精确的环境信息,学者们采用扫描式激光雷达传感器对环境进行即时定位与地图构建(Simultaneous localization and mapping,SLAM),利用雷达测距信息生成周围环境的稀疏点云数据,获得障碍物或标记点与机体的相对距离、方向、以及物体轮廓特征,对相对位置速度误差进行估计,结合惯性测量数据和外部障碍物或标记点信息作为观测量,通过扩展卡尔曼滤波(Extended Kalman Filter,EKF)、无损卡尔曼滤波(Unscented Kalman Filter,UKF)等算法,消除累计误差[19,20,21,22]。在使用雷达等飞行时间(Time of Flight,TOF)传感器获得距离信息时,同步引入与距离、视线角相关的反射信号强度信息,对SALM建模观测方程进行增广,可进一步降低3D环境中的建模误差[23]。为了便于验证各种SLAM感知算法,Gazebo simulator等SLAM开发仿真环境也开始被应用于农业。Habibie等[24]采用激光雷达和可见光双目视觉的方式,开发了果园SLAM系统,系统基于激光雷达对环境中障碍物和树木进行建模,基于可见光视觉系统对果实位置进行探测,并对果实品质进行估计,最后在Gazebo中进行仿真验证,仿真结果显示该方法能有效对果园内的环境进行实时建模,为植保作业提供对靶信息。系统工作过程如图4 所示。
2.2.2 机器视觉空间物体建模
3 精准施药过程建模与优化控制
3.1 雾滴沉积运动建模
不同于地面植保机械,无人机航空植保作业时无法深入作物冠层中施药,只能通过旋翼风场裹挟雾滴到达作物病害部位,因此无人机植保效果受旋翼下洗气流、环境风场、飞行高度、作业速度等多种因素影响[27]。要想达到精准变量施药的目的,必须对喷头所在风场和喷头雾化参数之间的耦合关系展开研究,建立雾滴沉积漂移过程的动力学模型,从而实现对雾滴有效沉积区域的实时预测,为控制系统精准施药提供依据。
3.1.1 雾滴沉积特性研究
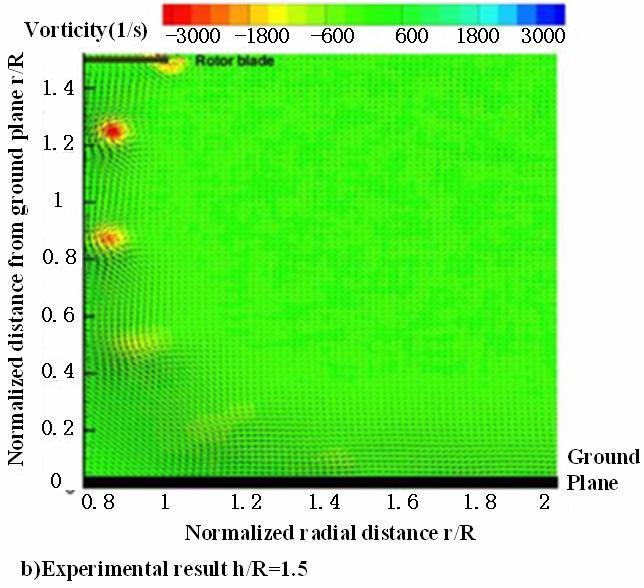
国内外针对无人机施药雾滴沉积特性的研究已经开展了多年,目前常用的研究手段为田间布点试验,对试验数据进行定量统计,获得样本的沉积点密度、粒径等。此种方式可对雾滴沉积效果进行量化评价,并在一定程度上获取雾滴沉积飘移与飞行高度、雾滴粒径大小、喷头布局和外部气象条件之间的影响关系和经验公式[28,29]。但此类试验受到环境条件和现有仪器技术水平的影响,只能对最终沉积结果进行静态观测,无法获得雾滴在喷头和风场作用下的运动过程及沉积穿透作用机理,难以形成通用的模型及结论。美国在1979年就开始基于固定翼有人机尾涡运动模型及高斯分布方法的建立雾滴飘移预测模型,并研发相关软件AGDISP[30]。唐青等[31,32]基于计算流体动力学(Computational Fluid Dynamics,CFD)模拟获得了固定翼有人机在不同作业条件下的雾滴沉积飘移模型,如图5 所示。高精度格式CFD模拟旋翼翼尖涡与试验结果对比如图6 、图7 所示。
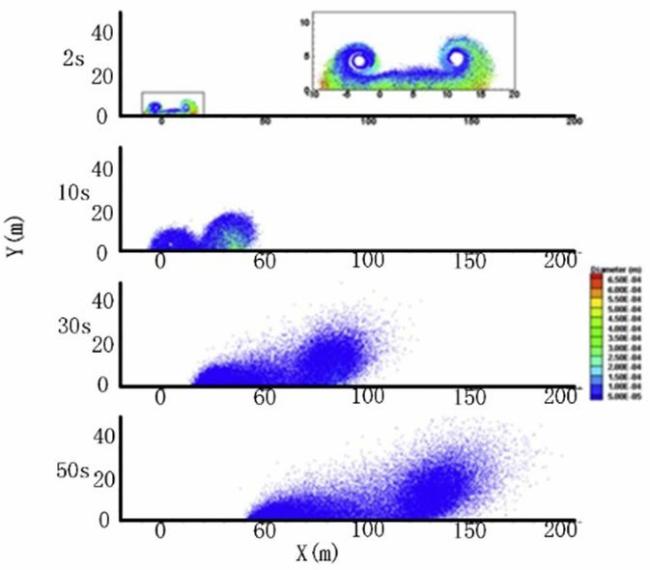
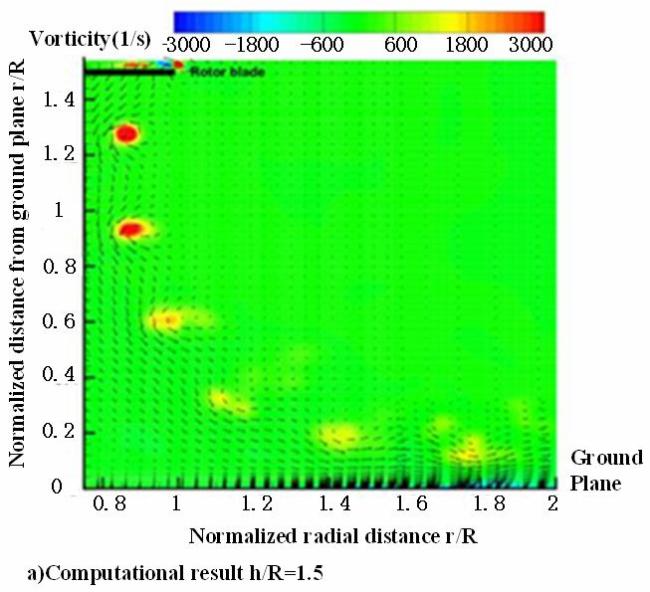
图 6 高精度格式CFD模拟旋翼翼尖涡Fig. 6 CFD predicted phase-averaged vorticity contours (along with velocity vectors) |
3.1.2 复杂流场湍流模型数值求解
综合目前的研究结果分析,针对农用无人机面临的近地面复杂流场环境,要获得较为真实的涡管三维运动仍需高精度瞬态算法和大量计算周期,难以直接应用,而采用基于雷诺平均方法(Reynolds Average Navier-Stokes,RANS)湍流模型数值求解N-S方程,通过优化自适应网格和并行算法,可降低计算周期,提高系统的实用性[35,36,37]。在喷雾模型构建方面,目前仍以非接触式测量方法为主,通过激光衍射、高速粒子图像测速等手段,对特定喷头、助剂、喷杆结构布局、管路压力等喷施参数下的雾滴粒径及速度的空间分布进行测量,获得无人机施药作业的喷雾模型。基于罗辛-拉姆勒(Rosin-Rammler)分布模型简化后,与无人机风场模型进行耦合,求解离散相雾滴的运动轨迹,从而实现雾滴沉积飘移规律的预测,以达到对作业过程中药剂覆盖区域与飘移特性的估计和规避施药作业风险的目的。
3.1.3 精准施药控制及先进雾化
无人机施药主要面向小地块区域,具有超低量、高精度的特点,需要将飞行导航控制信息与精准变量控制结合起来,依据飞行及作业状态信息的关键参数来实现精准变量喷洒控制,主要包括作业飞行控制技术、流量精准检测、流量输出控制、喷头雾化控制四方面技术。无人机的喷洒系统管路结构布局紧凑,采用传统的涡轮计数式流量计响应速度慢,且需要对管路进行改造,不利于应用,而超声非接触式流量传感器精度高响应快,且不影响系统管路,将逐步取代现有涡轮流量计。流量控制仍以传统的功率调节控制泵流量的方式为主,目前逐步引入机体姿态、位置、飞行速度、作业相对高度、以及环境气象条件等参数,共同完成控制决策,获得最佳的施药回收效果和沉积精度[38,39,40,41]。随着微机电系统(Micro-Electro-Mechanical System,MEMS)技术的发展,直接对单一喷头的独立控制必将成为未来研究的重点。在雾化技术方面,通过实际作业测试,采用电机控制的离心雾化喷头具有雾滴粒径谱分布窄,雾化幅宽大的特点,相对于压力喷头和液力雾化喷头的效果有明显的优势,目前已进入商用阶段[42,43,44]。无人机静电喷头具有雾滴漂移小,附着力高的特点[45]。何雄奎等[46]针对航空施药植保无人机设计了双极性接触式航空机载静电喷雾系统,在轻型油动直升机上对喷施油剂和水的电荷与雾化效果进行了测试,结果表明此类静电喷头与油剂配合使用,可有效提高雾滴沉积分布均匀性。国外学者在喷头技术上也已经开展多年的研究,从通用喷头、静电喷头、抗漂移喷头、逐步转向精准变量喷头。Daggupati[47]将微机电系统和喷头进行集成设计,通过微型电磁阀开关动作来调解喷口出水量,实现变量喷雾作业。Funseth等[48]采用步进电机驱动流量调节转盘转动的方式改变流体喷嘴的流体入口尺寸,从而实现变量喷洒。MEMS系统技术将控制、执行机构进一步小型化,精细化调解喷洒雾滴谱进行抗漂移和精准变量施药已经成为新的研究趋势。
3.2 作业路径最优算法
植保无人机载荷和续航能力较弱,且作业区域多为分散的小面积不规则区域,如何进行有效的作业路径优化,减少农业无人机作业过程无效的非作业飞行距离和时间具有重要意义。目前国内外农业无人机作业路径规划主要采用全覆盖算法,即规划路径必须对作业空间实现完全的覆盖。首先采用单元分解方式,参考地面作业机具工作模式,将作业区域按种植方向以梯形方式、栅格、维诺图(Voronoi diagram)等方式进行分割,在分割区域基础上进行单元分解和数字标记,然后再运用A*、动态规划(Travelling Salesman Problem,TSP)、遗传算法(Genetic Algorithm,GA)等优化搜索算法,最终使转弯、往返加药点等无效作业路径长度最短或作业能耗最小[49]。
农业植保无人机作业路径规划方法研究目前主要围绕单一区域多架次作业和多个非连通区域作业调度两个方面开展。
3.2.1 单一区域多架次作业路径规划
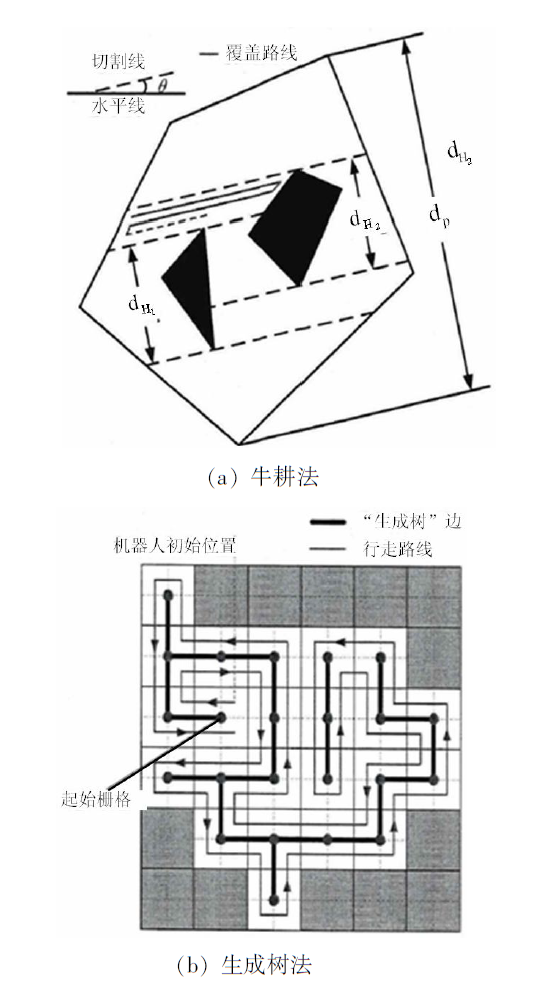
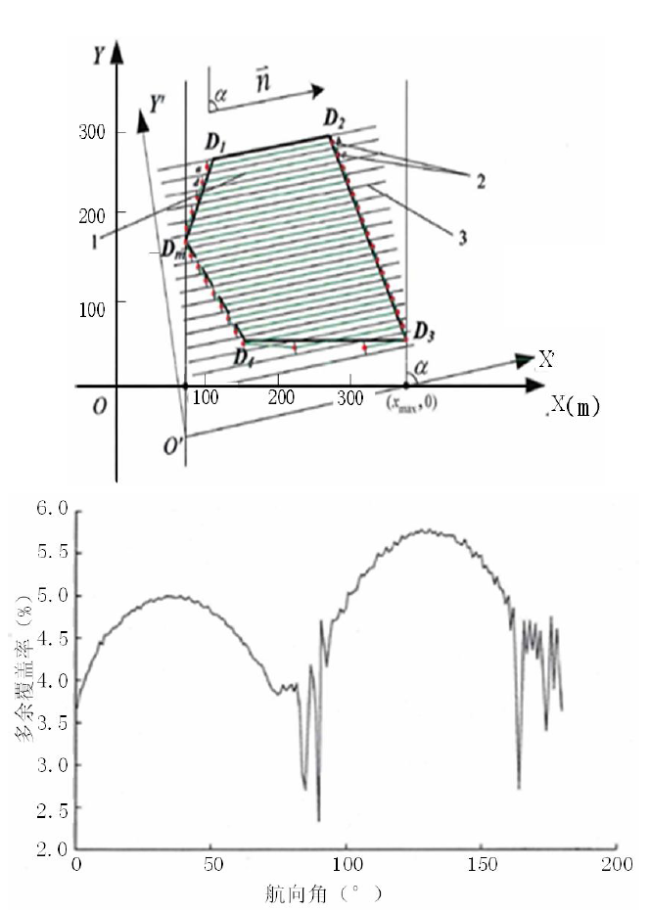
在单一区域中,由于种植方向约束,植保无人机作业通常采用单一方向规则往复的“牛耕法”,当药剂用完时再返回加药点补充药剂继续作业,这种方式作业中,地头转弯和多架次往返加药距离会因为作业规划不同而有很大差异,导致不必要的非作业能耗损失(图8 、图9 )。为了便于将计算智能引入作业路径规划中,栅格法被普遍用于构建作业环境描述模型,一方面可对作业区域进行精细到作业幅宽量级的数值化描述,另一方面有利于和GIS系统进行坐标的转化,将平面坐标点阵和大地坐标系映射关联起来。在区域栅格化后,根据区域面积、形状、作业航向方向、底边距离,为相应栅格赋予作业概率,优先选择概率高的栅格行进作业,同时以往返飞行、电池更换、药剂装填等非植保作业能耗最小为目标函数,通过采用引力搜索等智能搜索方法,实现对返航点数量与位置的寻优,进而优化作业路径[50,51,52,53,54]。
3.2.2 多个非联通区域多架次作业路径规划
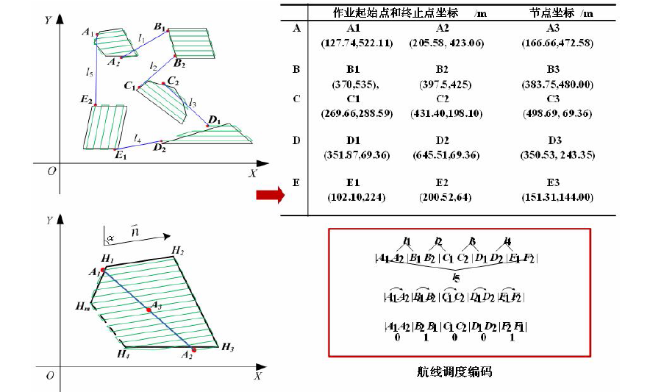
对于多个非连通区域作业问题(图10 ),先对单个作业区域进行局部作业路径规划,再将各区域作业顺序进行编码,采用遗传算法进行多个区域间飞行作业任务优化调度,从而最终优化整个全过程作业路径,提高无人机作业效率,目前通过仿真和示范试验已证明此方法的有效性[55]。多机协同植保作业路径规划及分配技术可充分发挥植保无人机低成本,易于使用的特点。Luo等[56]依据无人机动力学特性约束和作业区域杜宾曲线(Dubins)距离参数,构造基于时间窗和作业方向的多机作业效益函数,利用遗传算法设计多机协同作业路径规划算法,优化路径分配,提高作业效率。目前多机协同植保施药作业路径规划技术研究尚处于起步阶段,需要进一步开展依据无人机作业能力参数和施药覆盖效果的全局作业路径规划算法的研究。
4 作业效果综合评估与过程监管
4.1 植保施药效果的综合评价
植保施药的雾滴分布特性重要评价指标包括回收率和均匀性等,其中雾滴的回收率是检验药液沉积量的直接指标,沉降药液的均匀性是反映作业沉积质量的重要指标[57]。传统的雾滴沉积测量方法利用聚乙烯软管、聚乙烯板、雾滴采集卡、水敏纸、棉线和荧光纸带等采集农药雾滴分布,通过显微镜或图像软件分析雾滴覆盖率和雾滴密度。在药剂中添加示踪剂可估测农药沉积量、覆盖范围、雾滴粒径大小等参数[58]。利用无人机高光谱成像技术获取的叶片区域药液的光谱信息,可用于分析叶片施药后的药效;对获取的药物云团探测区域雾滴分布的红外成像光谱进行特征分析,能够反演药物云团浓度图像,并对雾滴漂移情况进行观测[59]。地面药效评估将逐渐从单纯的作业后效果评价向作业中信息反馈,形成实时作业闭环。张瑞瑞等[60]基于电容传感器原理设计开发了一款分布式雾滴沉积传感器及检测软件,该系统能够监测雾滴从沉积到蒸发随时间变化的全过程并将数据实时获取、回传、以及统计处理,具备了实时沉积效果评估的能力。新型传感器和物联网技术的应用丰富了作业效果评估的技术手段,探索并实现大闭环施药作业将成为新的热点。
4.2 基于云端数据管理的作业过程监管
5 问题及建议
智能无人机植保是目前精准农业领域热点技术,表现出巨大的发展潜力,但还需要在下列方面开展进一步研究探索:
(1)进一步开展基于遥感、地面传感器数据的多源信息融合智能作业决策方法的研究,引入固态激光雷达等新型复合光电探测技术,构建针对典型病虫害的多源信息样本库,加强实时环境感知和精准对靶技术研究。
(2)目前的无人机用喷洒器械技术对尚未达到高穿透性、窄雾滴粒径谱的作业要求,需要进一步结合MEMS技术、可控材料技术、探索雾滴形成机理,创新喷洒器械结构、控制方法,形成精准粒径谱控制装置。
(3)随着作业经验的积累和智能规划方法的引入,模拟仿真和快速数字推演技术使大部分过程状态变量在实际作业之前就已经被准确的估计出来,在此基础上可以开展基于虚拟样本的强化学习算法研究,探索障碍物规避和多机协同避碰的智能植保作业路径规划方法。
智能化植保无人机植保作业已成为未来精准农业领域最具有前景的技术,必将引起新一轮农业生产技术变革,从而对农业无人机植保技术的研发、应用造成深远的影响。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}