



1 引言
在电液控制方向方面,罗锡文等[10]、吴晓鹏等[11]分别设计了基于PID算法的导航控制器和基于C8051F040单片机的转向控制单元,他们通过改装原有拖拉机转向系统完成了电液控制的自动转向执行机构设计,试验证明其具有良好的响应特性;陈文良等[12]通过组合液压转向器、步进电机等设计了一种电控液压自动转向系统;Qiu等[13]设计的拖拉机自动转向操控系统具有良好的试验效果。通过电液控制实现自动转向的方法反映速度快、反映精度高、操纵稳定性好。在电机控制方向,胡炼等[14]、张智刚等[15]分别以日本久保田SPU-68型和SPU-60型水稻插秧机为研究对象进行了自动转向执行机构的设计。来自美国Trimble公司的“EZ-Steer”采用摩擦轮电机系统达到了自动转向的目的,成本低且安装简单。通过加装自动转向执行机构来实现自动转向的方式尽可能地减少了对拖拉机原有转向机构的改造。
针对农业机械自动转向系统现场安装调试费时费力的问题,研制了一种用于自动转向装置调试和测试的拖拉机自动转向试验台。所研制的试验台可集成液压自动转向装置或电动方向盘,能够完成轮式拖拉机的模拟加载和自动转向装置的性能测试。通过采集和记录转向过程参数,为拖拉机自动转向装置的快速安装提供依据,有助于减少田间调试时间,提高工作效率。
2 机械结构设计
为保证试验台较好的通用性,本试验台以东方红1204型120马力拖拉机[20]前桥为设计参考,进行整体机械结构设计。试验台总体结构图如图1 所示,主要由转向前桥、导向车轮、模拟加载装置、液压助力方向盘总成、机架等组成。
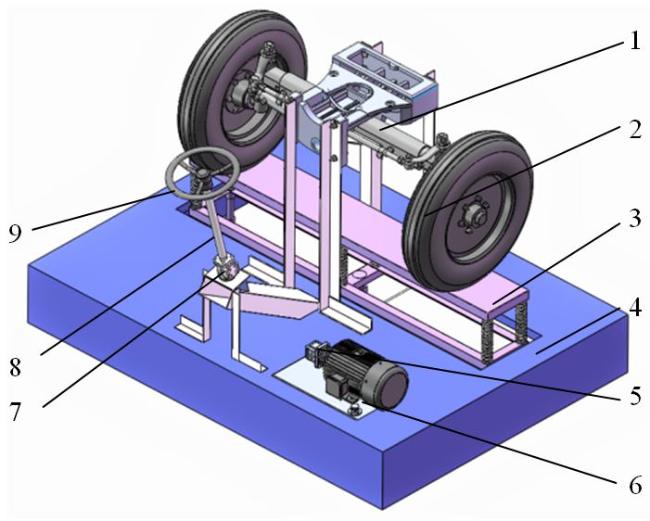
机架采用箱式底座,尺寸为2500mm×1800mm×35mm,用于支撑并安装其它部件。转向前桥选用1204型拖拉机转向桥,采用浮动式结构设计,前桥与浮动架铰接,可模拟路面不平时拖拉机的真实状态。
为了能够模拟拖拉机行驶时不同地面条件和作业工况,设计了模拟加载装置,该装置主要由轮胎托板、加载支架和千斤顶组成。如图2 所示。
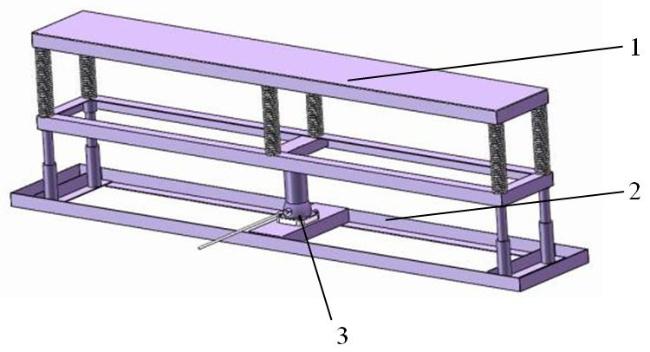
拖拉机行驶速度较低,对加载装置的控制精度和响应速度没有过高的要求,根据拖拉机的最小使用质量及最大配重,本研究选用起重量为5t的机械式千斤顶作为力的加载机构,通过调节加载定位螺栓可调节平台与车轮的间隙,通过调节加载压力螺栓可以改变平台施加力的大小。千斤顶加载时,产生的作用力由梁架传递给轮胎托盘平台,机体的重量由平台承受,使之保持平衡,梁板支架之间设有缓冲压簧。
3 液压系统设计
3.1 液压系统的原理
如图3 所示,本试验台的液压转向系统以变频电机作为动力源,主要包括液压泵、液压助力转向装置、转向油缸、二位二通电磁阀等。
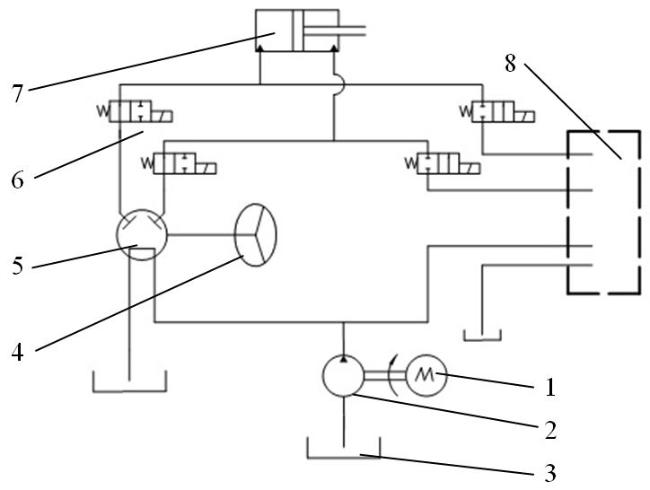
液压齿轮泵由变频电机驱动,为转向系统提供压力油源;二位二通电磁阀用以控制相应油路的通断;预留接口用以连接液压自动转向装置。当手动转向时,转向器端的电磁阀接通油路,转向器把液压泵提供的油定量、定向的输入到液压缸,推动拖拉机前轮实现动力转向,液压油的流量和流向由方向盘的转角大小来决定。当采用液压自动转向时,通过预留接口连接自动转向装置,二位二通电磁阀将手动转向油路断开,使自动转向油路接通,液压油通过自动转向装置进入油缸,实现自动转向。
3.2 液压元件的选型
Mdmax=Mμ+Mε=0.05GD+G(0.5Dtgε+S)sinεsinαmax
其中,Mdmax为拖拉机原地转向最大阻力矩,N·m;Mμ为地面对导向轮的摩擦阻力矩,N·m;Mε为抬起前轮的阻力矩,N·m;G为静止时前桥的垂直载荷,N;D为轮胎名义直径,m;ε为主销内倾角,(°);S为导向轮偏距,m;αmax为内导向轮最大转角,(°)。
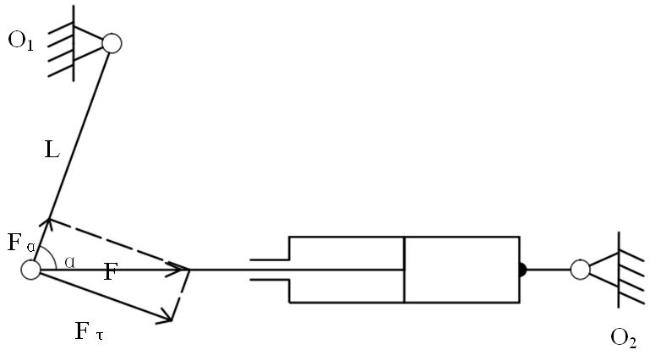
F =M max /(Lsinα)
其中,F为液压缸活塞杆的推力,N;L为转向连杆的长度,m。
本试验台选用单活塞式双作用液压缸,参考以上数据,转向液压缸有效工作面积为:
A = F/P=πD 2/4
其中,A为转向液压缸有效工作面积,mm2;P为转向系统液压缸的工作压力,MPa;D为液压缸内径,mm。为保证液压缸能够持续稳定地安全工作,活塞杆直径的选取参考经验值d/D=0.5,根据液压缸的标准尺寸系列经数据元整确定液压缸内径D为50mm,活塞杆直径d为25mm。
液压缸实际使用过程中最大转向作用力P为:
P=F/A=F/[π(D 2-d 2)/4]
其中,d为活塞杆直径,mm。计算得液压缸实际工作需要转向压力P为7.13MPa,小于液压系统的工作压力,满足设计所规定的作用力。
考虑管路损失,确定液压泵的最大工作压力为12MPa,转向过程中液压缸所需的最大流量和液压泵的输出流量计算公式如下:
qmax=AVmax
qp=KΣqmax
其中,qmax为液压缸所需最大流量,L/min;Vmax为液压缸活塞移动的最大速度,mm/min;qp为液压泵的流量,L/min;K为系统的泄露系数,K=1.1~1.3,取K=1.2;Σqmax为同时动作的液压执行元件的最大总流量,L/min。计算得液压缸所需的最大流量为3.24L/min,则液压泵输出流量应为3.9L/min。选用额定压力为16MPa,公称转速为2000r/min的齿轮泵,该齿轮泵结构设计简单,工作性能稳定,不怕油污污染。
4 电气控制系统
电气控制系统主要包括控制柜、变频控制器、变频电动机、操作显示面板等,能够根据系统转向要求对电动机进行变频调速,改变液压泵的输出流量;系统参数的采集处理,包括压力、电机转速、实时电压和电流等。
在转向过程中,系统的流量和压力一直处于变化之中,因此要求功率变化大,为了实现整个工作循环的目标要求,需要按大功率范围来选用电动机。驱动液压泵所需的电动机功率计算如下:
PM =PpQp / (60nP)
其中,PM为液压泵的驱动功率,kW;PP为液压泵的最大工作压力,MPa;Qp为液压泵所需输出的最大流量,L/min;np为液压泵的总效率,齿轮泵取0.6~0.7。
通过上节数据可知液压泵的最大供油压力为12MPa,根据上式计算液压泵所需的驱动功率约为1.3kW。故电动机选用国内常用的Y系列三相异步电动机,额定功率为4kW,额定转速为1400r/min。
变频器作为执行机构,通过控制电机的频率进而控制电机的转速。选用功率为4kW,可输出频率为0~400Hz的变频器。变频器和电动机及其系统电路的接线如图5 所示。
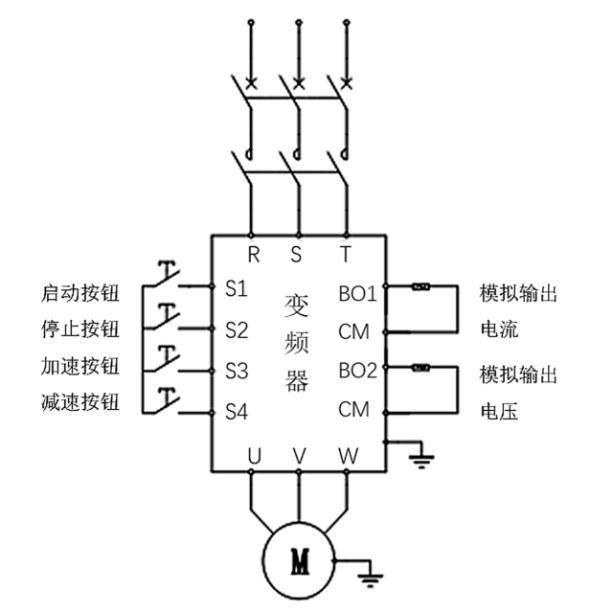
电气控制柜控制面板可显示实时电压、电流以及转速等信息供操作人员参考,并通过加速、减速、启动、停止按钮实现对变频电机的实时控制,控制面板见图6 。

5 试验台测试及结果分析
5.1 测试方法

为了测试拖拉机自动转向试验台的工作性能和转向稳定性,对其进行了左转、右转、车轮回正等一系列性能试验。将惯性测量单元固定于试验台的转向立柱及方向盘上,分别用以记录转向轮和方向盘的转角、转速等转向数据,惯性测量单元的安装如图8 所示。

试验测得车轮从正中分别转动到两侧的极限角度均为40°,即转向立柱旋转角度的最大值φmax为80°。
试验时间:2019年1月10~13日。
试验地点:山东理工大学。
试验对象:按照本研究方法研制的拖拉机自动转向试验台。
测量设备:LPMS-USBAL惯性测量单元。
试验过程中,设定拖拉机转向轮正前方向为转向角度的零点,向左角度为正,向右角度为负,分别以不同的转动速度操作方向盘使转向轮偏转一定角度,对转向系统进行工作性能测试。
5.2 测试结果及分析
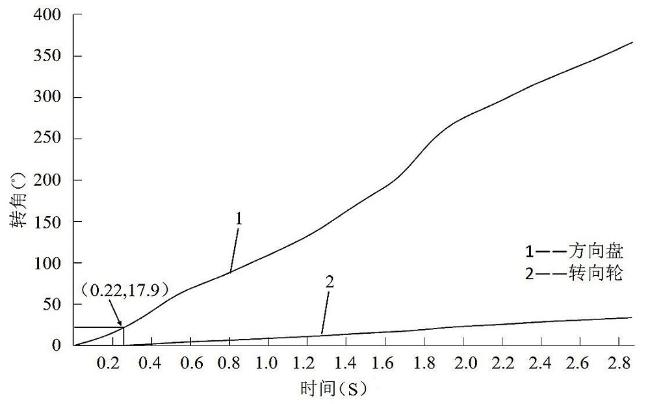
不考虑拖拉机起始转向间隙,将记录的方向盘转角映射至与转向轮转角同一尺度范围下,得到车轮的实际转角、理论转角及其斜率的转向过程曲线。在一定时间间隔内,取理论转角值及其对应时间,同时观察与所取理论转角相同的实际转角所对应的时间,对比两者并得到时间差,该时间差即为转向轮相对于方向盘转角的延迟时间。
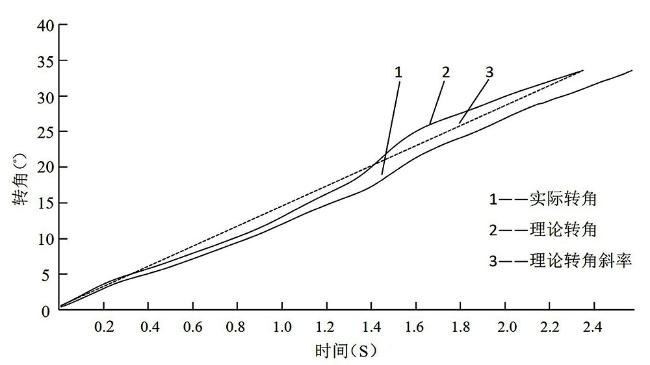
在常用范围及小转角范围内,实际转角和理论转角相比偏差较小,响应时间短,操纵灵活。试验结果表明该试验台能够在人工操控下以较高的精度完成转向,转向性能可靠,可满足自动转向装置的调试和性能测试要求。
6 结论
为了减少农业机械自动转向装置的田间调试时间,降低调试成本,搭建了拖拉自动转向试验台,其结构主要包括机械部分、液压系统、电气控制系统等,并通过惯性测量单元完成了试验台转向系统的工作性能测试。
(1)本研究所研制的拖拉机自动转向试验台,模拟加载装置可施加0~5t的力,驱动形式为液压助力,可以通过矢量变频器调节变频电机速度来调节液压齿轮泵转速以模拟农业机械的不同工况。
(2)该试验台采用全液压转向器进行转向,能够模拟拖拉机前桥的工作状态,并对转向性能参数进行采集处理,试验结果证明其系统可靠、响应迅速、具备良好的转向稳定性。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}