




1 引言
小麦条锈病的监测和预报能力近几年有了很大提升。目前,主要的监测方式有以下3种:(1)利用高光谱图像进行遥感监测[8]。Yones等[9]研究了光谱辐射技术在美洲幼虫腐臭病光谱鉴别中的潜在应用,对11个蜂群的蜜蜂幼虫样品在350~2500nm波段进行了高光谱测量,得出红外光和短波红外光谱带是区分健康蜜蜂幼虫和不同程度蜜蜂幼虫感染的有效方法;Pan等[10]评价了高光谱成像监测梨果实致病过程和早期检测梨果实病害的潜力,以新鲜库尔勒梨为试材,接种交链格孢菌,从感染样品和对照样品中获取高光谱图像。利用光谱角标测技术,对感染区与声组织进行分割,监测疾病的致病过程,建立了支持向量机(SVM)、K最近邻和偏最小二乘判别分析模型,并对其早期发病的检测能力进行了评价,结果表明,SVM模型的整体精度为97.5%,最适合于该方法;黄木易等[11]通过人工田间诱发不同等级条锈病,在不同生育期内对不同发病等级的冬小麦条锈病冠层光谱进行测定,并同步进行条锈病病情指数的调查,通过分析不同区域小麦在不同光区的反射特征差异和叶绿素含量变化成功进行了病情划分;王利民等[12]基于GF-1/WFV影像数据和小麦条锈病遥感监测指数(Wheat Stripe Rust Index,WSRI)对小麦条锈病发病范围进行估测,结果表明,研究区内小麦条锈病空间分布识别的总体精度在84.0%以上;蔡成静等[13]利用ASD手持野外光谱仪和热气球分别在近地和高空研究了条锈病发病小麦冠层的高光谱遥感数据特征,获得了2个高度不同平台的光谱数据,最终获得了高空光谱反射率值与近地光谱反射率之间的回归模型。Wang等[14]通过遥感技术从地面、空中和近地空间三个方面总结了同一目标不同光谱,以及同一光谱不同目标的图像,定义了遥感监测条锈病流行的最低阈值,并建立了基于光谱信息的小麦条锈病反演模型,展望了多害虫遥感、空间遥感以及地理信息系统、全球定位系统监测小麦条锈病的发展趋势;刘伟等[15]分别利用近地高光谱和低空航拍数字图像同时对田间小麦条锈病的发生情况进行监测,结果表明,近地高光谱遥感参数DVI、NDVI、GNDVI和低空航拍数字图像颜色特征值R、G、B与病情指数存在极显著相关性。(2)根据小麦不同生长阶段,通过判断菌源量进行预测。邓玉傲等[16]通过研究2001年以来河南新野小麦条锈病的发生规律和特点,得出了小麦发病的严重度和月份以及地理位置的关系以及小麦条锈病预警的合理指标。(3)通过远程捕捉孢子方式监测小麦条锈病发病情况[17,18]。该方式多采用自动图像采集方式,孢子捕捉器将采集到的孢子图像通过网络传输至实验人员进行处理分析。焦林等[6]设计了一种基于无线网络的孢子图像实时传输及处理系统,通过数码显微镜和胶带将采集到的孢子图像进行远程传输;雷雨等[19]利用ARK-1123C型工控机将涂抹了凡士林的玻片捕捉到夏孢子图像,通过网络传输至用户端,实现了全自动玻片更换和凡士林涂抹。
2 系统设计
2.1 监测系统装置要求
根据小麦条锈病监测的实际需求,小麦条锈病远程监测系统的整体设计方案应满足以下要求:
(1)系统能实现图像采集、上传和分析的自动化,采集装置应能够实现玻片的自动切换、自动清洗和自动回收,系统应包含基于Android手机的应用程序实现远程图像监测和采集装置附近各项数据的采集。
(2)系统应可长时间在麦田中进行空气中小麦条锈病孢子的采集,不间断地收集采集装置内的孢子图像,并对小麦条锈病的发病情况进行持续监测。
(3)系统应拥有独立的网络服务器,可对收集装置采集的图像进行云端保存,用户可通过登录服务器查看孢子采集器应用区域的空气成分历史数据。
2.2 系统整体设计
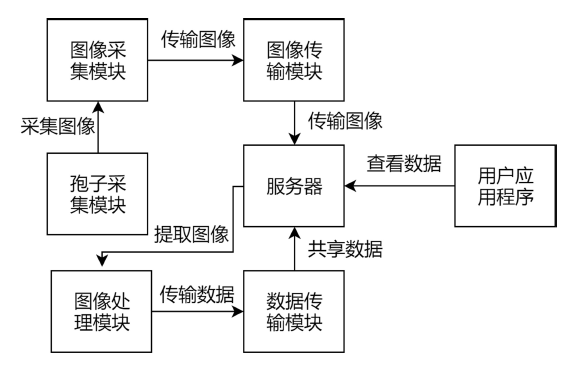
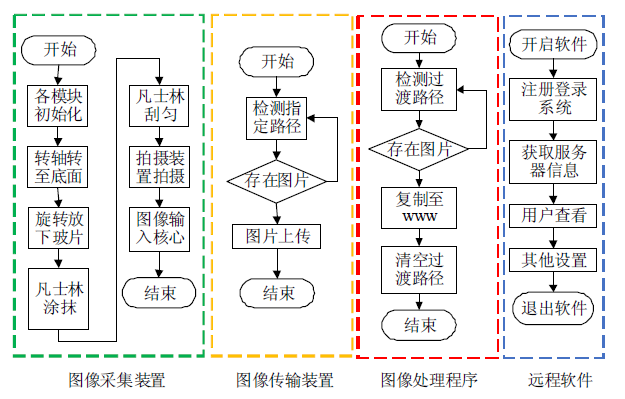
为了实现田间小麦条锈病孢子图像的实时采集和远程查看,本设计基于Arduino Uno和42步进电机的孢子采集装置,结合显微图像拍摄装置进行孢子图像的采集;基于Ubuntu 18.04系统的服务器和图像滤波、数学形态学运算和基于几何形态学因子的孢子图像计数等算法对采集的孢子图像进行计数分析;基于安卓Android系统的手机应用程序进行处理后孢子图像及孢子计数结果的查看。系统由孢子采集模块、孢子采集装置、显微拍摄装置图像采集模块、图像传输模块、嵌入式核心板、云服务器、Android手机等组成,图像采集模块采集孢子图像,传输至图像传输模块后上传至服务器;服务器通过运行图像处理模块将图像数据再次共享至服务器,用户通过手机应用程序进行登录查看。其中服务器图像处理算法采用Python3结合Skimage-0.14.0和Numpy-1.15.1图像处理包完成图像灰度化、双边滤波、形态学开闭运算和角点检测等方法进行孢子图像的计数;Android程序采用Java语言编写,JDK 1.8,运行平台为Android 6.0以上版本手机。系统整体架构图如图1 所示。
2.3 系统硬件组成结构
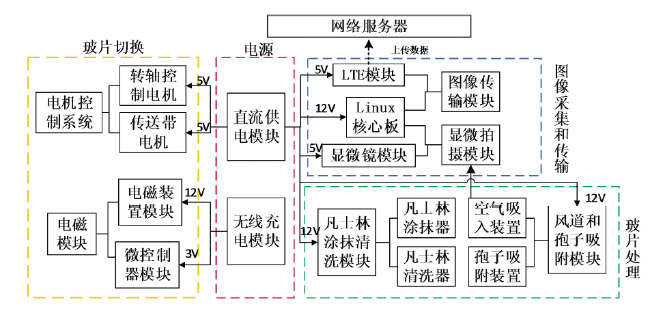
该远程监测系统硬件包括孢子采集装置和供电装置。系统硬件组成示意图如图2 所示。孢子采集装置包括玻片切换模块、显微拍摄装置、图像传输装置。供电装置包括直流供电模块和无线充电模块。
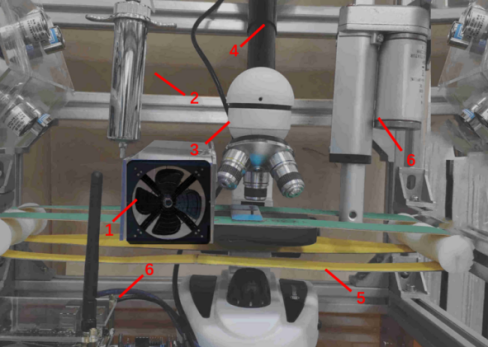
系统实物如图3 所示。
(1)孢子采集装置
该装置用来进行空中孢子的采集、吸附和图像采集传输,该装置包括玻片切换装置、凡士林涂抹和清洗装置、显微拍摄装置和图像传输装置。玻片切换装置由传送带和转轴组成,转轴控制玻片的上下移动,传送带输送玻片在不同模块间运动。凡士林涂抹装置用来对玻片进行凡士林涂抹,清洗装置用来清洗玻片上的凡士林,实现玻片的再次利用。风道和孢子吸附装置用来将空气吸入装置中,通过凡士林将空气中的条锈病孢子吸附在玻片上。显微拍摄装置通过显微镜和电子目镜采集玻片上的孢子图像。图像传输装置通过瑞芯微RK-3399核心板将显微拍摄装置采集到的孢子图像经LTE模块上传至服务器。
(2)供电装置
该装置用来对整个硬件平台进行直流供电。供电装置细分为直流供电模块和无线充电模块。直流供电模块用来对Linux核心板以及各步进电机进行供电,供电电压为12V,采用12V可充电蓄电池进行供电。同时该模块采用太阳能充电装置和MP-2636电源管理模块进行充电升压等电源管理。无线充电模块用来对封闭转轴进行无线充电操作,充电电压为5V,采用德州仪器的BQ-51013B芯片结合充电线圈进行无线充电模块接收器的设计,采用三星无线充电器即可进行充电。
2.4 系统软件组成及服务器选择
系统软件包括基于Ubuntu 18.04网络服务器的孢子图像分析程序和基于Android平台的图像处理分析结果远程查看程序。考虑到网络云服务器的运行相较于本地服务器更为稳定,具有全天候工作的特点,因此选用云服务器,系统为Ubuntu 18.04,配置为1核Intel Xeon CPU,2G运行内存,50G机械硬盘存储空间。
(1)孢子图像分析程序
该程序用来对远程传输至云服务器上的显微孢子图像进行处理,分析结果以文本形式传输至Android手机供用户查看。用户可同时进入服务器查看历史记录,便于分析小麦条锈病发病趋势。
(2)Android远程查看程序
该程序用来对服务器处理后的显微图像进行远程实时查看以及查看孢子图像的处理分析结果。
3 系统实现
3.1 硬件实现
3.1.1 孢子采集装置
(1)玻片切换模块
玻片切换模块用来完成玻片在不同模块间的切换。玻片切换模块的研究主要分为核心选择、转轴模块和传送带模块3大部分。玻片切换模块如图4 所示。
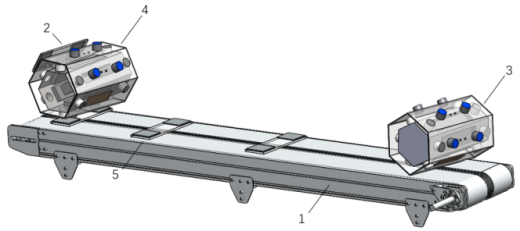
其工作原理为:各模块经供电后开始工作,传送带初始状态为向右传送,两个转轴模块电磁装置均保持闭合状态。转轴开始工作后,六棱柱的最底面电磁铁经过micro:bit核心板控制断电,玻片下落至传送带,向右传送至下一模块,同时控制转轴的步进电机顺时针转动60°,使六棱柱的下一平面和传送带平行,平行后micro:bit微控制器重复上一操作,通过控制电磁装置的打开将玻片下放至传送带上。在传送带向右工作的同时,右侧六棱柱接到玻片运动的位置信号后开始工作,在玻片运动到其底面下侧时,micro:bit微控制器控制底面电磁铁通电,将玻片回收至六棱柱上,同时转动60°使下一面平行于传送带平面。右侧六棱柱收集满载玻片后,传送带改变方向,右侧六棱柱将玻片依次下放至传送带上,左侧六棱柱按序收集载玻片,完成载玻片的回收工作。
① 微控制器与Linux核心板选择
由于玻片切换模块系统需要进行转轴和传送带的动作控制,工作量较大,因此本研究采用多核心控制的方法,各核心通过蓝牙短程通信实现数据传输。
a.考虑到转轴模块的运动控制较为简单,只需要稳定的信号输出即可完成控制,选用Arduino Uno微控制器作为核心板,L298N电机驱动板进行驱动信号的输出。
b.传送带模块的运动形式包括正反向转动和减速转动3种,考虑到需要进行转速控制,选用Arduino Uno微控制器作为核心板,L298N电机驱动板进行脉冲控制以改变传送带的转速和方向。
c.转轴中的电磁模块需要通过继电器进行控制,考虑到封闭转轴内空间狭窄,而外接蓝牙模块需要较大空间,该系统采用micro:bit微控制器作为核心板控制继电器,其中板载蓝牙设计可以节约空间,且micro:bit采用Python编程,语言较为简洁。
② 转轴模块
转轴模块在Arduino和micro:bit微控制器的控制下,进行旋转和电磁状态切换,完成玻片的自动更换和采集。根据玻片切换模块功能要求,设计了适用于小空间玻片切换的转轴模块,其组成如图5 所示。
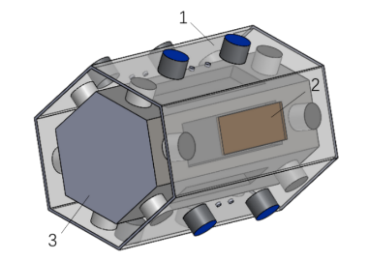
六棱柱转轴分为内外2部分,其中6组电磁铁位于六棱柱转轴的外侧,电源线通过外侧的2个小孔和内测的继电器相连,继电器和micro:bit微控制器相连,micro:bit微控制器通过蓝牙和其他微控制器通讯。内侧转轴两端分别固定减速电机和空心电机转轴,减速电机由另一组Arduino Uno R3结合L298N电机驱动板进行控制。Micro:bit微控制器控制内侧继电器进行电磁铁的通断控制,电磁铁外侧连接两端进行金属加工的载玻片。电磁铁通电后载玻片被吸附至电磁铁上,电磁铁断电后载玻片被放下。结合转轴转动和传送带运动,玻片在转轴和传送带间运动,实现玻片切换。
③ 传送带模块
传送带模块在Arduino微控制器和直流电机的控制下进行玻片传输工作。根据玻片切换模块的要求,设计了适用于狭小空间的玻片在各处理模块间传输的传送带模块,其组成结构如图6 所示。
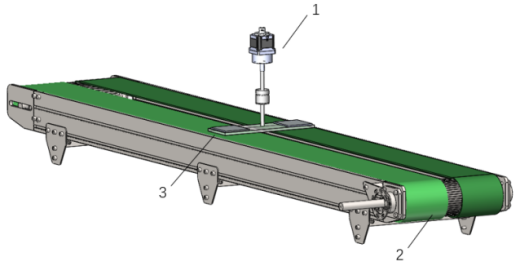
传送带采用PVC轻型工业皮带,9-2A齿轮、6×8蜗杆配合双260小型电机组成传送带系统。开始工作后,开启蓝牙信号接收,若收到六棱柱转轴发出的逆向信号后传送带向左运动一段时间。若没有收到逆向信号,则传送带继续向右运动。
(2)凡士林涂抹和清洗装置
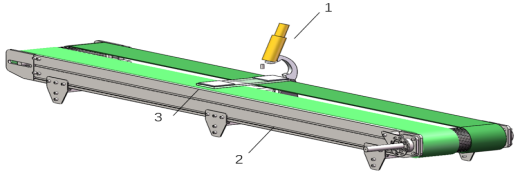
凡士林涂抹和清洗装置主要用于完成玻片的凡士林涂抹工作和清洗工作,其示意图如图6 所示。凡士林储存在金属注射器内,注射器上方的推杆电机以预定的路径长度推动注射器将适量的凡士林涂抹在玻片上,玻片通过传送带继续向右移动,经过凡士林刮板将凡士林涂抹均匀,便于后续孢子的吸附和观测。
(3)风道和孢子吸附装置
风道和孢子吸附装置用于将外部空气吸入装置内,并通过涂抹凡士林后的玻片标本将孢子采集并转入下一模块。风道和孢子吸附装置如图7 所示,空气经过外部风扇的抽取进入装置的封闭空间内,封闭空间内置一块涂抹凡士林的玻片标本,空气中的成分被凡士林吸附后玻片经传送带转入下一模块。

(4)显微拍摄装置
显微拍摄装置用来对加工后的玻片标本进行图像采集。考虑到孢子的直径多为2nm大小,为了使视野内的孢子数量合适,本研究采用2000倍光学显微镜作为光学图像采集装置,显微镜采用Bresser-2000家用显微镜结合工业显微镜头拍摄相机进行图像采集。传送带中段镂空,内置激光对射开关,当玻片经过激光对射开关后,触发显微拍摄动作,传送带暂停运动,相机对传送带上的玻片进行拍摄后,传送带继续向右运动输送下一玻片。显微拍摄装置示意图如图8 所示,激光对射开关分别被安装在传送带内侧和传送带正上方,经过处理的玻片沿传送带向右运动进行图像采集操作。
(5)图像传输装置
图像传输装置用来将显微拍摄装置采集到的孢子图像经过4G-LTE网络传输至云端服务器,图像传输操作以Linux核心板为核心,同时控制电源管理和显微镜动作。核心板需要和显微拍摄装置连接,通过USB通信获取显微镜头拍摄的图像,将图像暂存并上传至云服务器。考虑到核心板工作较为复杂,对处理器核心要求较高,本研究选用瑞芯微RK-3399核心板作为Linux核心板,核心板为Little体系结构:双核Cortex-A72结合四核Cortex-A53处理器芯片,64位CPU,内置USB3.0和Display Port交替模式的双类型。核心板通过USB连接摄像头,图像信息通过USB3.0传输至核心板暂存,核心板通过LTE模块将图像数据传输至云服务器的指定位置。
3.1.2 供电装置
(1)12V电源模块
考虑到转轴采用内部封闭式供电,本研究采用分离供电形式对2个模块进行供电,6400mAh锂电池对转轴内的电磁装置供电,20000mAh锂电池对Linux核心板供电。外部12V供电电路连接电压监测芯片,通过检测主供电设备的输出电压来控制继电器通断以决定备用电源是否接入Linux核心板。
(2)无线充电模块
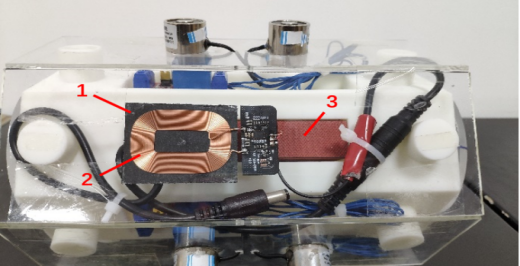
考虑到转轴内部电磁装置为封闭式供电模式,不易更换电池,本研究在转轴的其中一面安装无线充电接收装置进行无线充电。无线充电接收器如图9 所示。模块采用Ti的BQ51013B芯片进行能量转换,线圈位于六棱柱内侧,5V输出模块连接12V升压模块,升压模块末端连接12V电源的充电端口,外部连接无线充电器后将对内部12V电源进行充电。
3.2 软件实现
3.2.1 系统工作流程
系统开机后即开始初始化,系统工作流程如图10 所示。首先传送带上的激光对射开关检测是否有遮光区域,若没有则开始向右传送。左侧六棱柱转轴开始运动,无线充电和传送带平行后,转轴逆时针旋转60°开始工作,每旋转60°,对应面的电磁铁断电释放玻片。与此同时,玻片随传送带向右运动依次通过凡士林涂抹装置、显微拍摄装置以及玻片清洁装置。当无线充电面再次旋转至和传送带平行后,完成一次检测过程。另一侧的转轴工作为回收玻片,玻片回收动作和玻片释放动作相反,每个电磁铁面依次通电,随着六棱柱转轴的旋转将玻片依次回收。回收完成后转轴向传送带发送逆向旋转信号,传送带逆向传送,玻片被依次释放回传送带,左侧转轴进行玻片重载。显微拍摄装置拍摄图像后,将采集到的图像数据传输至Linux核心板,核心板通过LTE网络将图像数据上传至云端服务器。云端服务器接收到图像数据后,进行图像分析处理,并将结果以文本形式保存。用户通过Android应用程序远程访问服务器中的相关数据,获取条锈病孢子的检测结果及其他气象数据。
3.2.2 孢子图像分析程序
孢子图像分析程序用来对服务器上的孢子图像进行计数。程序运行在Ubuntu18.04云端服务器上,配置为1核Xeon CPU,2G运行内存。考虑到程序的跨平台性,本研究基于Python3编程,结合Skimage和Numpy图像处理包进行孢子图像的分析处理操作。程序开始运行后进行图像搜索,若规定路径没有图像则继续搜索。获取图像后对图像进行灰度化、双边滤波、数学形态学运算、边缘检测和计数操作。最终计数结果以.txt格式保存在服务器的规定路径。
(1)孢子图像的预处理和图像滤波
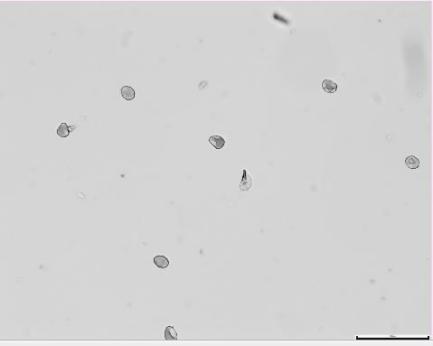
孢子图像在拍摄获取采集过程中会受到各种因素的干扰,图像会存在一定的噪声,影响后续的孢子计数工作。本研究经图像灰度化操作降低图像信息量,为之后的图像滤波操作奠定基础(图11 )。经过高斯滤波去除图像中的高斯白噪声,进一步突出孢子区域,为下一步边缘提取奠定基础。经过分析发现,本研究采集到的孢子图像灰度值主要集中在[50,200]区间内,故本研究对区间外的灰度值进行了置零处理,便于后续的图像处理操作。
(2)孢子图像的数学形态学运算和边缘提取
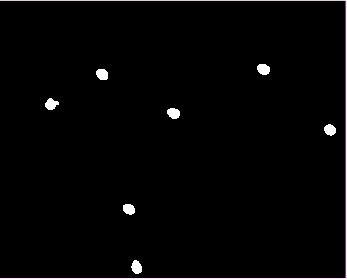
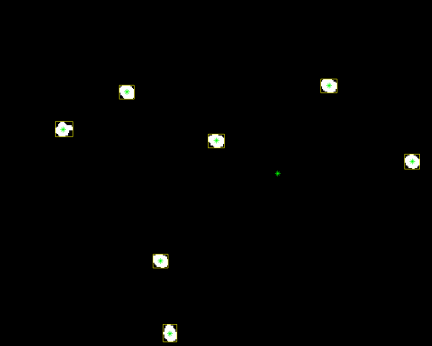
(3)孢子图像计数(图13 )
考虑到采集到的孢子图像存在一定粘连的情况,本研究采用基于几何形状因子特征[15]的方法区分单个和粘连孢子。形状因子的定义如公式(1)所示:
其中,S是连通域的面积像素值,C是连通域的周长像素值。
3.2.3 传送带和转轴协同运行程序
传送带和转轴由Arduino Uno R3微控制器控制,Arduino Uno R3编程环境为Arduino IDE,语言为C语言,采用L298N电机驱动板带动步进电机和直流电机转动,转速由PWM脉冲控制。传送带保持向右转动,左侧转轴初始化先定位至无线充电面,无线充电面的定位由该面上的超声测距模块实现,距离小于最小值h_min时转轴停止转动,经过1s后逆时针转动60°开始释放玻片。玻片的释放操作由电磁模块完成,电磁模块由转轴内部的micro:bit微控制器控制。微控制器每隔ti秒(转轴旋转60°所需的时间)将第i面的电磁铁断电,依此类推。同时,传送带将释放的玻片传送至另一侧转轴进行回收,回收转轴的定位方式和释放转轴一致,每隔60°内置的微控制器将最底面的电磁铁通电将玻片吸附上转轴。当无线充电面和传送带平行后,微控制器通过蓝牙向控制传送带的Arduino Uno R3发送逆向信号,传送带开始逆向转动,玻片将会被依次回收至初始转轴,开启重载模式。
4 试验结果与分析
4.1 试验环境
为了验证本系统的可行性,在陕西省杨凌示范区西北农林科技大学机械与电子工程学院的农业农村部农业物联网实验室使用实验装置进行了显微图像的采集实验以及图像处理系统和远程访问系统实验;在西北农林科技大学北校区的小麦试验田进行了大田环境下系统的运行能力测试,温度为18~25℃。
4.2 系统整体及各部分运行测试
4.2.1 图像处理程序测试
为了确保孢子图像能够被准确高效地处理和分析,对本研究采用的图像处理程序进行了运行测试,测试平台为腾讯云服务器(Ubuntu18.04系统,Intel Xeon-E3处理器,1核,2G内存),用于测试图14 中4幅显微孢子图像中的孢子数量,测试共进行三次,取三次试验后的平均值,测试结果分别如表1 所示。
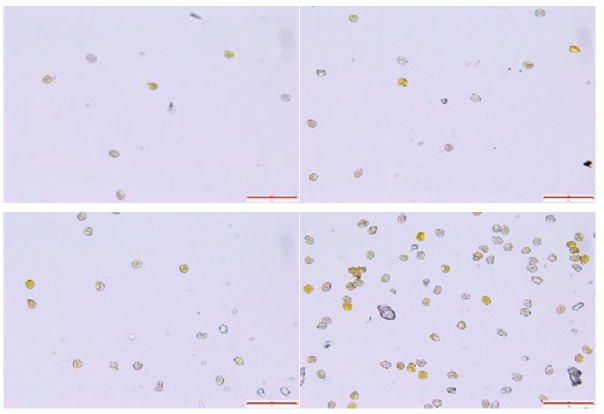
考虑到服务器平台和主机平台的配置差异,对相同的4幅图像在Windows 10 Home平台下进行了孢子计数测试,测试结果如表2 所示。
表2 Windows平台下程序处理不同图像的运行时间Table 2 Time in processing different images based on Windows |
| 测试图像 | 实际数目 | 测试结果 | 用时(s) | 准确率(%) | |
|---|---|---|---|---|---|
| 1 | 8 | 8 | 45 | 100 | |
| 2 | 14 | 14 | 43 | 100 | |
| 3 | 17 | 17 | 46 | 100 | |
| 4 | 110 | 110 | 45 | 100 | |
对比表1 和表2 可以看出,在服务器端的Ubuntu平台下图像的处理速度比Windows平台慢3~4s的时间,但处理结果相同。从表2 可以看出,孢子数量的增加对图像处理的速度没有明显影响。
4.2.2 孢子采集系统的运行测试
(1) 传送带和转轴最底面的有效距离测试
玻片通过电磁装置被吸附上转轴,因此转轴最底面距离和传送带应保持合适距离,既可以避免传送带的运动影响玻片和转轴的吸附,又可以保证玻片能够正常地被转轴上的电磁装置吸附。为了测试出最佳距离,对转轴的电磁装置和玻片的相对距离进行了测试,方式为测试不同距离下的玻片和电磁装置的吸附情况,测试结果如表3 所示,可知玻片和电磁装置的距离应在1.4cm以内,为了确保玻片可以被电磁装置吸附,本研究将传送带和电磁装置的相对距离设定为1cm。
表3 不同距离下载玻片和电磁装置的吸附情况Table 3 Adsorption results of Slides and electromagnet under different distances |
| 测试距离(cm) | 吸附状况 | 测试距离(cm) | 吸附状况 |
|---|---|---|---|
| 0.5 | 成功 | 1.1 | 成功 |
| 0.6 | 成功 | 1.2 | 成功 |
| 0.7 | 成功 | 1.3 | 成功 |
| 0.8 | 成功 | 1.4 | 失败 |
| 0.9 | 成功 | 1.5 | 失败 |
| 1.0 | 成功 | 1.6 | 失败 |
(2)“转轴—传送带”系统运行测试
为了确保“转轴—传送带”系统能够正常运行,对转轴和传送带组成的玻片切换系统进行了20次运行测试,测试结果如表4 所示。可知“转轴—传送带”系统运行状况良好,一次图像采集循环所消耗的平均时间为2.1min,基本满足系统的实时监测需求。
表4 玻片切换系统运行测试Table 4 Test in slides shifting system |
| 测试序号 | 完成时间(s) | 测试序号 | 完成时间(s) |
|---|---|---|---|
| 1 | 124 | 11 | 125 |
| 2 | 123 | 12 | 124 |
| 3 | 失败 | 13 | 127 |
| 4 | 126 | 14 | 124 |
| 5 | 124 | 15 | 123 |
| 6 | 126 | 16 | 127 |
| 7 | 127 | 17 | 126 |
| 8 | 123 | 18 | 125 |
| 9 | 124 | 19 | 124 |
| 10 | 125 | 20 | 125s |
4.2.3 孢子采集系统大田环境下运行测试
为了确保系统可以在大田环境下持续运行,对系统在试验田中进行了能量可用性测试,测试日期为2019年1月1日-1月17日,温度为-6℃—5℃。经测试,该系统在阳光充足的条件下可通过18V太阳能电池板供电连续运行15天,在阴天条件下可连续运行5天,基本满足大田环境下的装置的持续工作。
5 结论
(1)针对现有孢子采集装置存在的不足,基于“互联网+”技术和RK-3399嵌入式开发板以及显微拍摄镜头,提出了一种高效低成本的小麦条锈病远程监测方案,系统能够实现对大田小麦条锈病发病情况的实时监测。
(2)试验表明系统可以在大田环境中连续运行三天,并成功完成孢子图像的采集、传输、远程处理和处理结果远程查看工作。其中,孢子图像的采集成功率为98.2%,玻片切换系统运行成功率为95%,对于测试图像的处理准确率为100%。本研究可为小麦条锈病的防控提供出新的解决方案。
(3)本装置对小麦条锈病孢子实现了较为准确的技术,但在自然条件下,所获得的孢子中可能混有条锈病、叶锈病、杆锈病等的孢子,对混合情况下各类孢子的区分,尚需进一步研究。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}