



1 引言
梯田是在坡耕地上沿等高线修筑的阶台式或波浪式断面农田,通过减缓坡度,减轻土壤侵蚀来提高土地作物产量[1]。修建梯田极大地提高了坡耕地的农业生产能力[2],其蓄水的功能[3]对旱作农业发展及生态环境十分必要[4,5]。多年来,在中央强农惠农政策的指引和支持下,中国北方黄土丘陵区大力推进以坡改梯为重点的高产稳产农田建设,提高了旱作区农业综合生产能力[6],但由于前期修筑质量不佳以及管理养护不善,梯田设施面临破坏的危险[7]。梯田边缘真实地反映梯田的形状、位置、轮廓等信息,及时准确地掌握梯田边缘信息为预防和修护加固梯田提供重要的依据,同时对于梯田区域的种植面积、种植范围的统计,以及对梯田和旱作区农业建设的发展具有重要的意义[8]。
传统的边缘提取方法主要基于影像数据[16]。Eckert等[17]基于高分辨率卫星梯田影像数据,采用面向对象的方法进行识别与分类。首先对研究区的光谱特征、纹理特征以及形状特征采用支持向量机(Support Vector Machine,SVM)方法构建分类模型,进而对梯田进行大面积提取,最终的提取精度为81.25%,但是该方法不能有效提取梯田田坎间断裂的田面,技术有待进一步提升。刘丽霞等[18]提出改进Canny边缘检测的遥感影像分割方法。选择多光谱遥感影像为数据源,结合Canny算子采用引导滤波方法对图像进行平滑处理,解决了高斯滤波在进行图像平滑时边缘模糊的问题,对“椒盐现象”起到了较好的改善效果。但是该方法在分割时会将阴影部分错分为边缘。Chang等[19]提出一种新的高分辨率合成孔径雷达(Synthetic Aperture Radar,SAR)图像边缘检测方法。采用基于面积像素差异的(Scanning Window Central,SWC)检测方法,实现最佳边缘检测,并提出一种改进的能量函数主动控制方法来确定边缘的位置。陶舒等[20]基于高分辨率遥感影像提出面向对象的多尺度分割边缘提取流程。首先将研究区的高分辨率遥感影像进行第一层分割,提取潜在道路;第二层改变分割尺度,利用面积阈值等特征来进行划分。Zhang等[21]分别采用边缘特征统计算法、模板匹配算法和傅里叶变换算法来进行梯田的识别和提取。其中边缘特征统计算法根据训练样本区域来确定识别的窗口大小以及有效边缘线条数的特征阈值,基于有效边缘线条数作为模板对二值化图像进行分类并自动进行提取。模板匹配算法根据图像的灰度特征建立识别模板,通过计算方差阈值对样本进行分类。傅里叶变换方法基于梯田纹理特征,通过计算谱线方向,确定特征阈值后对样本进行分类。但是以上方法都没有进一步探索地形数据如坡度融合影像对边缘提取效果的影响。
本研究在前人研究的基础上,利用无人机航空摄影获取的高分辨率遥感梯田正射影像及地形数据,采用粗边缘提取和精细边缘提取两种边缘提取方法,对比仅正射影像、正射影像和坡度融合的两种数据源提取效果。结果表明,坡度数据对提高梯田边缘提取的精确度起到了积极的作用。本研究可以为无人机遥感影像边缘提取提供地形特征多源数据有效性证明。
2 研究区概况与数据预处理
2.1 研究区概况
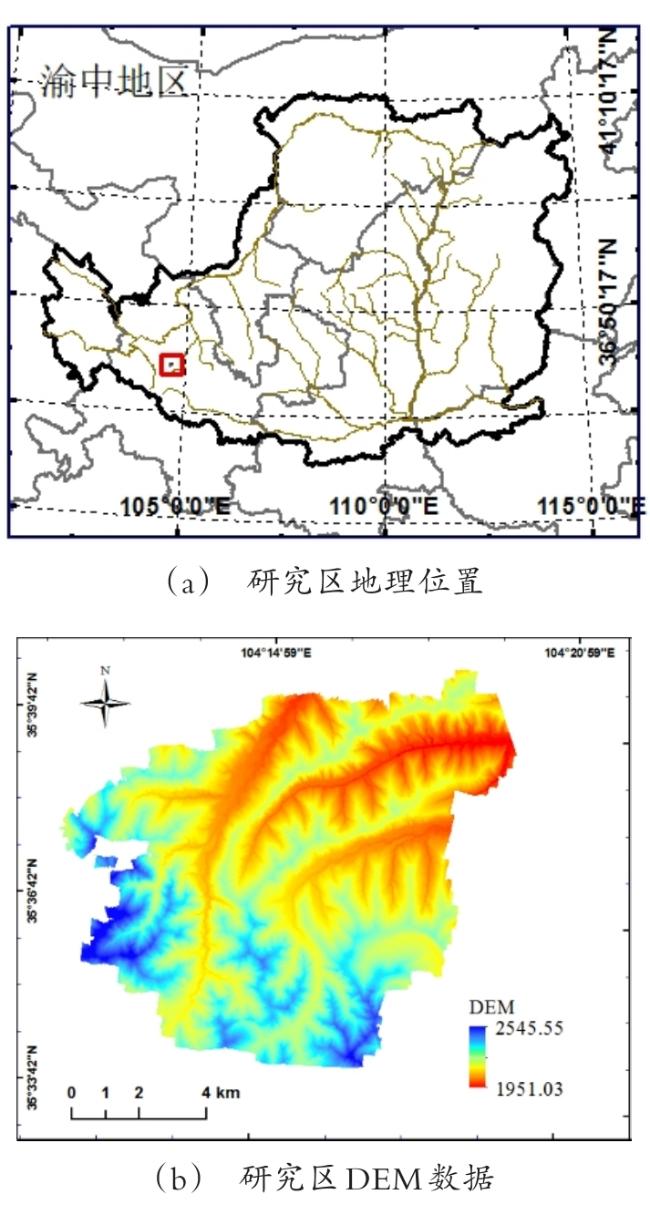
本研究选取甘肃省榆中地区的龙泉乡旱梯田区,该区总面积84km2,地理坐标N35°34'4″~N35°40'56″,E104°10'58″~E104°19'51″,平均海拔2160 m,地形以沟壑梁峁为主,研究区内梯田边缘清晰,具有一定的典型性[24]。
2.2 数据基础及预处理
2.2.1 数据基础
研究区影像采用安翔动力AF1000型无人机于2016年3月拍摄,拍摄期间风力小于4级,天气晴朗且能见度高,全程总计耗时约24 h。搭载SONY A5100相机,单幅影像面积约340m×500 m,影像分辨率为0.05m。基于该精度要求,在样本区内的梯田边缘、道路交叉口中心共布设83个地面控制点,使用实时动态定位(Real-time Kinematic,RTK)进行测量。
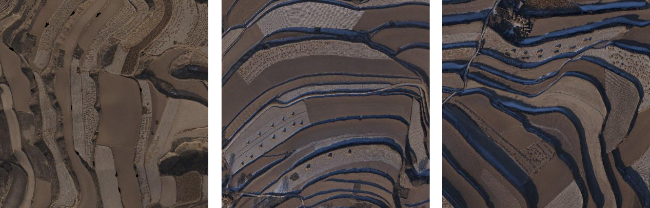
课题组从研究区域截取3块梯田样本区,其正射影像如图2 所示。样本区1(图2 (a))田面分布交错,边缘特征多样,比较明显。样本区2(图2 (b))田面光谱复杂,边缘规则但狭窄,样本区内包含少量道路。样本区3(图2 (c))田面纹理复杂,边缘不规则且弯曲度大,样本区内包含大量道路和少量丘陵。
2.2.2 数据预处理
3 试验方法
3.1 粗边缘提取方法
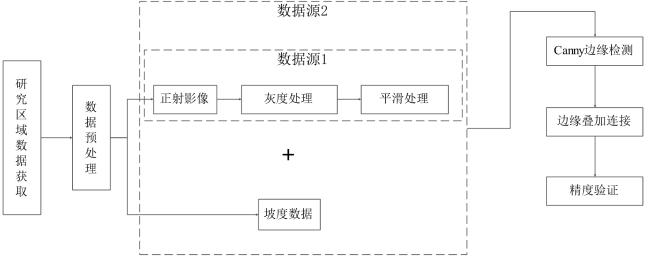
首先对正射影像进行灰度处理和平滑处理,处理后的影像作为数据源1,将数据源1与该样本区对应的坡度数据融合作为数据源2。最后分别对数据源1和数据源2使用Canny检测算子进行边缘检测,两种数据源检测得到的边缘分别叠加连接到原始的正射影像图中并进行精度验证和对比。方法流程图如图4 所示。
3.1.1 影像灰度处理及平滑处理
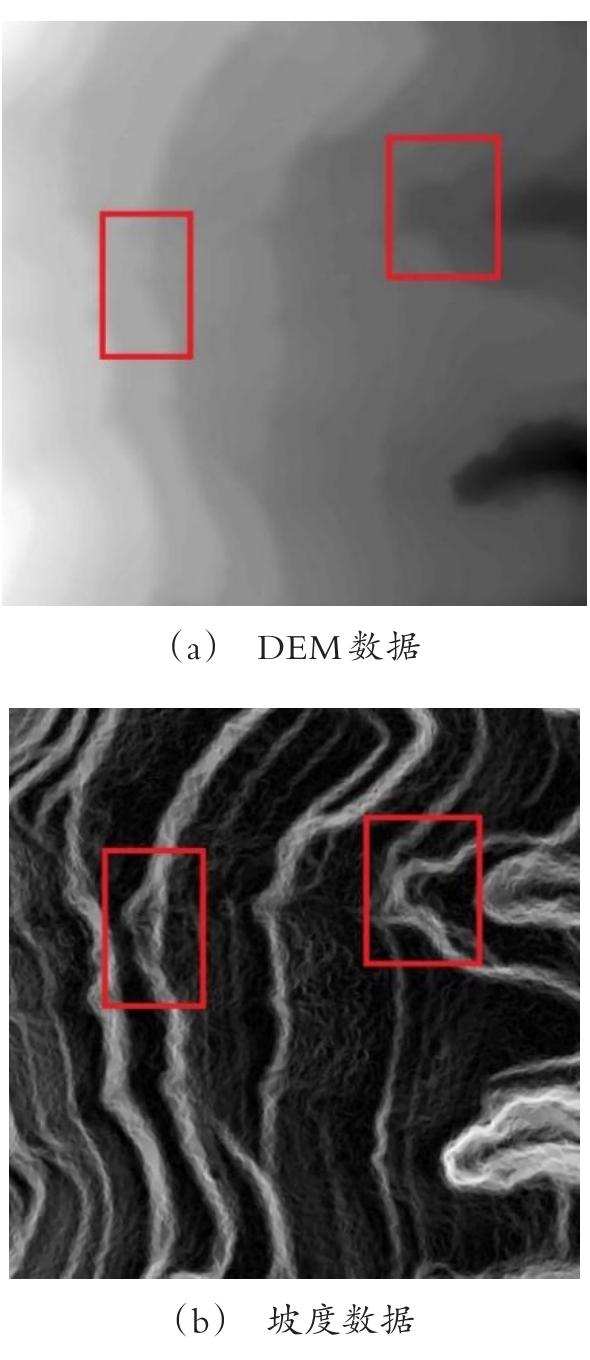
无人机正射梯田影像中,田面上纹理复杂并存在大量点状干扰,为降低正射影像中田面复杂的细节干扰,同时不使田面的边缘结构模糊,本研究使用粗边缘提取方法将图像进行灰度转换和平滑处理。
正射影像转换灰度图像方法见公式(1):
其中, 为像素点 转换后的灰度值, 为像素点 的红色分量, 为像素点 的绿色分量, 为像素点 的蓝色分量。
采用高斯平滑[28] 方法对转换后的灰度图进行平滑处理,其公式为:
其中,δ为方差,值为1;m,n为窗口数量,值均为3; 为像素点 的灰度值;k为求和下标,k=1,2,……,l为求和下标,l=1,2,……。
3.1.2 Canny边缘检测
(1)梯度幅值和方向的计算
首先对平滑后的影像数据及坡度数据中的像素点使用一阶微分算子进行卷积计算,计算出该像素点的梯度及方向,一阶微分算子 见公式(3):
梯度和方向的计算公式如公示(4)和(5):
其中, 为像素点(m,n)处的x坐标方向梯度, 为像素点(m,n)处的y坐标方向梯度, 、 分别为像素点(m,n)处的梯度和方向, 是像素点 的灰度值。
(2)幅值非极大值抑制和双阈值检测
为确定梯田边缘,从全局梯度中选择保留局部最大值,并对极大值以外的其他梯度设置2个阈值 和 进行抑制, =0.5 ,非极大值抑制之后提取到梯田的候选边缘。
(3)伪边缘剔除
田面复杂的纹理特征容易检测出虚假边缘,本研究根据表1 的边缘检测规则,对梯田坡度和影像数据的伪边缘通过遍历的方式进行剔除,步骤如下:
表1 研究区域梯田地物特征规则表Table 1 Terrace land feature classification rule of research area |
| 地物对象 | 梯田边缘 | 丘陵 | 道路 |
|---|---|---|---|
| 边缘长度(pix) | >100 | >300 | >200 |
| 坡度(°) | 7~20 | <15 | 0~6 |
| 坡度变化率(%) | <7 | >20 | 0~2 |
① 将图像按顺序扫描,找到第1个没有标记并且满足梯田边缘规则的像素点,将其压入栈内。
② 设①中的像素点为 ,以 为中心,遍历 的邻域是否有标记的像素点,如果有,将该像素点与 合并在同一区域内,也压入栈内。
③ 从堆栈中取出一个像素,把它当作 ,返回到步骤②操作。
④ 当堆栈为空时,判断合并的区域像素个数,满足梯田边缘规则中的边缘长度则返回到①;不满足则剔除该区域之后返回步骤①。
⑤ 重复步骤①~④直到图像中每个像素点都被标记。
3.2 精细边缘提取方法
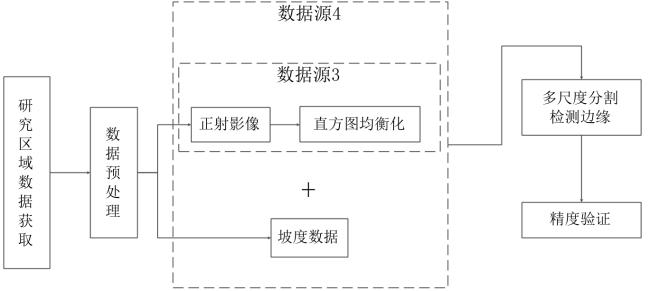
精细边缘提取方法流程如图5 所示。首先将样本区的正射影像数据进行直方图均衡化处理作为本方法数据源3,然后将坡度数据与数据源3融合作为本方法的数据源4,最后分别将数据源3和数据源4依次进行多尺度分割、边缘增强处理和精度验证。
3.2.1 直方图均衡化
为获得更好的边缘检测效果,首先使用限制对比度自适应直方图均衡化(Contrast Limited Adaptive Histogram Equalization,CLAHE)方法[30]进行数据增强。CLAHE同普通的自适应直方图均衡不同之处主要是其对比度限幅。在CLAHE中,对于每个小区域都必须使用对比度限幅,主要是用来克服其他直方图均衡化方法的过度放大噪音的问题。
3.2.2 多尺度分割
3.3 精度评价方法
基于目视解译制作粗边缘提取和精细边缘提取的真值图,把4个数据源测试结果图按像素点与真值图一一对照进行精度统计,并计算边缘检测总体精度(Overall Accuracy,OA)[33]和用户精度(User’s Accuracy,UA),精度计算公式如下:
overall accuracy=
User’s accuracy=
其中,TR为结果图中与真值图标记结果相同的像素点;TF为结果图中与真值图标记不同的像素点,EdTR为标记结果边缘的点。
4 结果分析
4.1 粗边缘提取方法
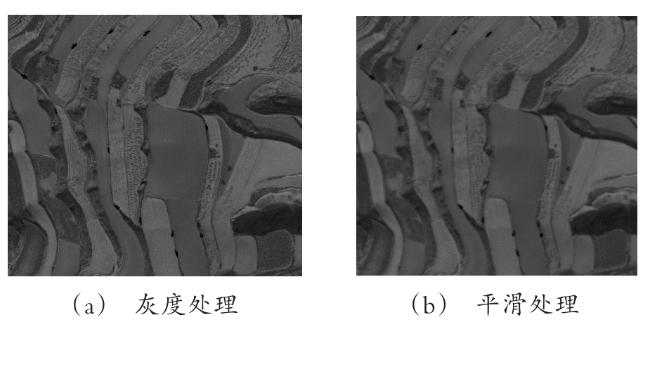
以样本区1为例,灰度转换和平滑处理的效果图如图6 示。
三个样本区的提取结果如图7 所示,其中第一列为样本区1、2、3的粗边缘提取真值图,第2列为基于正射影像的数据源1粗边缘提取结果图,第3列为基于正射影像和坡度融合的数据源2粗边缘提取结果图。可见,数据源2在粗边缘提取方法中边缘检测效果得到了明显的提高,大幅度减少了梯田田面错分为梯田边缘的现象,取得了更准确的分割结果。在三个样本区中,仅基于正射影像的数据源1将部分不平整的田面也提取为梯田边缘,融合坡度数据后的数据源2明显减少了这种误差,取得了更精确的提取结果。具体的精度值如表2 所示,样区1基于数据源2的OA精度相比基于数据源1提高31.3%,UA精度提高28.21%;样区2基于数据源2的OA精度相比基于数据源1提高19.13%,UA精度提高15.56%;样区3基于数据源2的OA精度相比基于数据源1提高21.66%,UA精度提高18.27%。
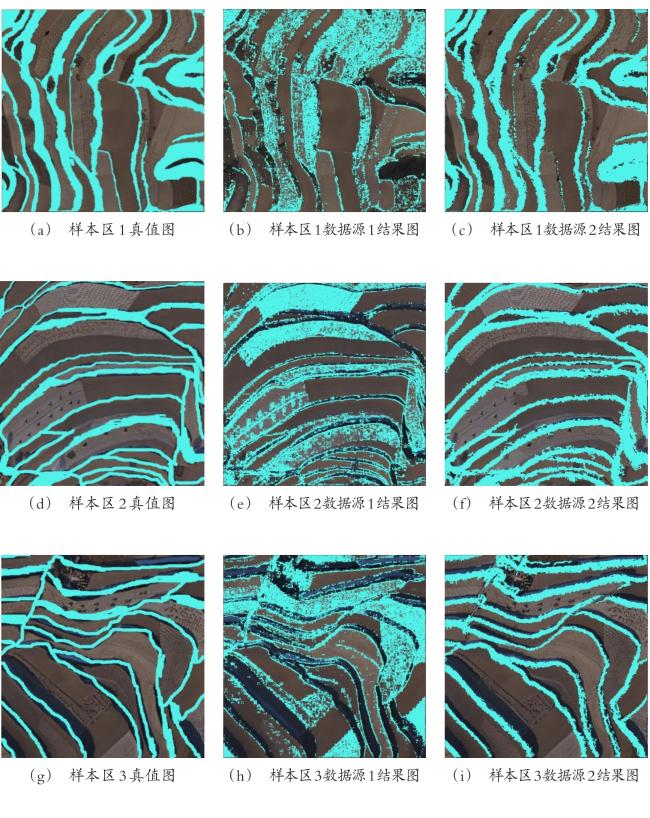
图7 粗边缘提取样本区结果对比图Fig.7 Comparison results of sample area processed by rough edge extraction |
表2 粗边缘提取样本区精度Table 2 Accuracy of rough edge extraction sample area |
| 样本区 | 数据源1 OA精度(%) | 数据源1 UA精度(%) | 数据源2 OA精度(%) | 数据源2 UA精度(%) |
|---|---|---|---|---|
| 1 | 61.85 | 62.45 | 92.96 | 90.66 |
| 2 | 59.76 | 67.51 | 78.89 | 83.07 |
| 3 | 63.97 | 66.77 | 85.63 | 85.04 |
4.2 精细边缘提取方法结果
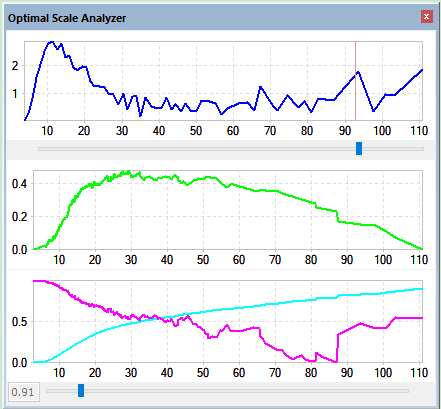
以样本区1为例,在SmartSIAT工具中将形状因子设置为0.5,建立相应的尺度集,根据尺度分析图(图8 )得出最佳分割尺度为0.91。
三个样本区的边缘提取效果如图9 ,其中第1列为样本区1、2、3的精细边缘提取真值图,第2列为基于正射影像的数据源3精细边缘提取结果图,第3列为基于正射影像和坡度融合的数据源4精细边缘提取结果图。由结果图对比可以看出,正射影像和坡度融合的数据源4在精细边缘提取方法中取得了更好的提取效果。在三个样本区中,仅基于正射影像的数据源3都受到了梯田田面纹理的严重干扰,提取的边缘崎岖不平滑且不够准确,融合坡度数据后的数据源4明显降低了这种干扰,提取的边缘结果更平滑准确。具体的精度值如表3 所示,样区1,样区2,样区3的数据源4相比数据源3在OA精度和UA精度两个方面都有所提升。样区1基于数据源4的OA精度相比基于数据源3提高14.33%,UA精度提高12.84%;样区2基于数据源4的OA精度相比基于数据源3提高19.24%,UA精度提高14.44%;样区3基于数据源4的OA精度相比基于数据源3提高19.96%,UA精度提高29.74%。
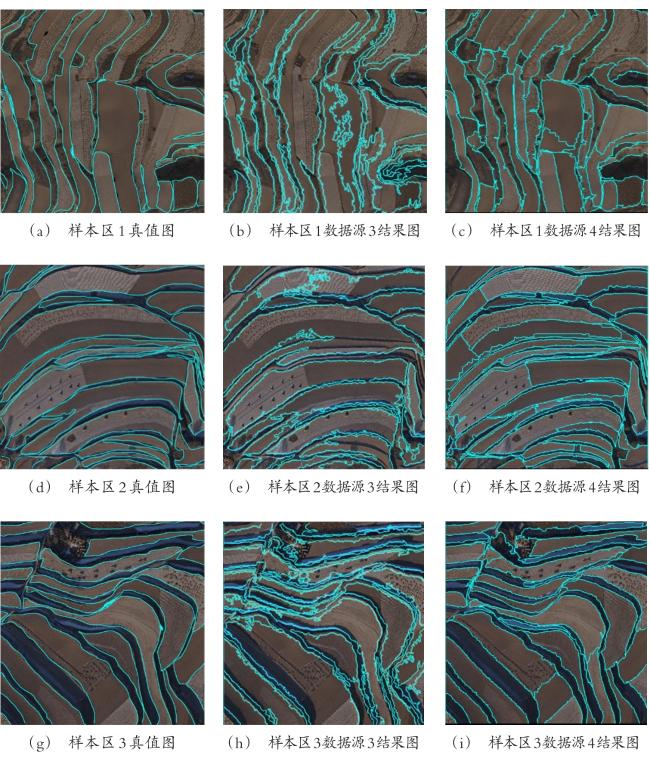
图9 精细边缘提取样本区结果对比图Fig.9 Comparison results of sample area processed by meticulous edge extraction |
表3 精细边缘提取样本区精度Table 3 Accuracy of meticulous edge extraction sample area |
| 样本区 | 数据源3 OA精度(%) | 数据源3 UA精度(%) | 数据源4 OA精度(%) | 数据源4 UA精度(%) |
|---|---|---|---|---|
| 1 | 67.40 | 70.7 | 81.73 | 83.54 |
| 2 | 65.26 | 67.76 | 84.50 | 82.2 |
| 3 | 62.07. | 59.09 | 82.03 | 88.83 |
4.3 精度分析
对粗边缘提取样本区精度(如表2 所示),精细边缘提取样本区精度(如表3 所示)进行分析,在粗边缘提取方法中,正射影像和坡度融合的数据源2比正射影像数据源1在OA精度评价中平均提高了23.97%,在UA精度评价中平均提高了20.68%。在精细边缘提取方法中,正射影像和坡度融合的数据源4比正射影像数据源3在OA精度评价中平均提高了17.84%,在UA精度评中平均提高了19.0%。两种梯田边缘提取方法中,正射影像和坡度融合后的梯田边缘提取效果都比正射影像有所提高。表明坡度数据的加入有效地提升了梯田边缘提取的效果。
5 讨论与结论
本研究通过无人机正射影像、正射影像与坡度融合的两种数据源,依次使用粗边缘提取方法和精细边缘提取方法进行梯田边缘的提取。结果表明,在两种方法的梯田边缘分割效果中,正射影像与坡度融合的数据都明显优于单一的影像数据,从而证明了坡度数据的加入有助于无人机遥感影像边缘提取取得更准确的结果。
地形特征的加入有助于梯田区域的有效分割,高精度的遥感影像数据更加提升了分割效果。本研究结论适用于无人机梯田遥感影像的分割及基于分割进行的检测工作。但本研究仅探索了梯田影像的分割,对于农田、河堤等其他的土地类型分割尚未做研究,仅可作为坡耕地类型土地的分割参考。
本研究仍有许多可以改进之处:①只对比了坡度数据对梯田遥感影像边缘提取的影响,尚未探索更多其地形因子对边缘提取效果的影响;②可以考虑设计一种模型按权重将不同地形数据结合对梯田遥感影像边缘进行提取。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}