



1 引言
在智能农机系统的快速发展及其社会化与专业化服务的发展趋势下,本研究提出基于北斗卫星导航系统(北斗系统)构建大田智慧农业精准服务体系,在精确导航的基础上,发展精准作业和精细管理,形成较为完备的精准农业技术、装备和服务体系,提高农业生产力、增加农民收入和促进农业农村可持续发展,为国家农业财政补贴发放和肥药减施监测与补助等提供可靠的技术手段。
2 北斗系统概况
北斗系统由空间段、地面段和用户段三部分组成。空间段由若干地球静止轨道卫星、倾斜地球同步轨道卫星和中圆地球轨道卫星三种轨道卫星组成混合导航星座。地面段包括主控站、时间同步/注入站和监测站等若干地面站。用户段包括北斗兼容其他卫星导航系统的芯片、模块、天线等基础产品,以及终端产品、应用系统与应用服务等。
随着北斗系统建设和服务能力的发展,相关产品已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、森林防火、通信时统、电力调度、救灾减灾、应急搜救等领域,逐步渗透到人类社会生产和人们生活的方方面面,为全球经济和社会发展注入新的活力。
2013年4月,在北斗二号系统建成并开始提供区域服务之际,为促进中国精准农业技术装备发展和北斗系统农业应用,财政部、农业农村部在国家农机购置补贴目录中,增加“精准农业设备”小类,对“农业用北斗终端(含渔船用)”进行财政补贴[4]。该补贴政策的实施,促进了一批卫星导航企业和农机主机企业研制北斗农机自动驾驶导航系统,形成了良好的技术和市场竞争格局。截止到2019年9月,据作者初步统计,北斗农机自动驾驶导航系统已累计推广近3万台(套)。
3 北斗系统农业应用概况
当前,北斗系统在中国农机化领域中的规模化应用主要体现在3个方面:农机精确导航、农机精准作业和农业生产精细管理。
3.1 农机精确导航应用
3.2 农机精准作业应用
3.3 农业生产精细管理应用
基于混合数据的农业生产管理与决策服务具有广阔的应用前景[3],但中国当前主流应用是农机作业监管。
3.3.1 面向农业生产组织的农机作业监管应用
3.3.2 面向主机企业的农机远程运维应用
基于农业机械的实时位置、工作状况和作业状况等信息,建立农机位置服务平台,可以提高作业计量、资产管理、作业调度和维修保养等工作效率,降低管理服务成本。当前,面向主机企业的农机位置服务平台已得到一定程度的应用,例如雷沃阿波斯的智慧农业解决方案iFarming[11]。
3.3.3 面向主管部门的农机化管理应用
典型的面向主管部门的农机化管理应用主要包括:农机购置补贴“三合一”试点要求轮式拖拉机、自走轮式谷物联合收割机安装卫星定位终端[36],对补贴机具进行跟踪管理;江西省农机局要求补贴额1万元及以上的大中型机具必须配备卫星定位装置;各省市农机深松作业监管应用和秸秆还田作业监管应用等。
4 农机社会化精准服务体系
大田智慧农业的农机社会化精准服务体系的构建,是在以物质装备为核心要素的农机社会化服务基础上,发展以“智能装备+信息知识”为核心要素的农机精准服务[7]。由于中国的农机作业本就以农机社会化服务为主,在此基础上发展农机精准作业服务具有较好的先天优势。
4.1 农机社会化服务
中国政府持续鼓励土地流转,支持建设农业专业合作社,引导集约化和规模化生产[37]。部分合作社经营的土地规模达到甚至超过了美国家庭农场的土地规模。但由于难以连片流转,土地仍然比较分散,致使合作社无法像美国家庭农场那样选用效率高、数量少的大型农机装备,只能使用数量众多的中小型农机装备。为了提高农机作业效率和人员管理效率,发展农机服务专业合作社是必然选择。在完成土地成片流转之前,农机合作社为农业合作社和小农户提供农机社会化服务将是一种常态。
4.2 农机精准作业服务
智慧农业技术装备在智能装备的基础上融入了信息知识,普通农民往往难以直接领悟和全面接受与应用[4]。例如,大田作物的肥料使用往往包括底肥和追肥,为此需要开展田间土壤取样和养分分析,以及作物长势监测与营养诊断。以上专业化的技术和知识难以为普通农民所熟练掌握和应用,即使能够掌握也无法体现规模效益。因而,在发展智慧农业技术装备的同时,应大力发展社会化的精准作业服务,使智慧农业技术落地生根和产生效益。
美国普渡大学(Purdue University)开展的精准农业经销商调查结果也充分反映了美国精准服务(Precision Service)蓬勃发展的现状和趋势。调查表明,与2017年相比,2019年的网格/区域土壤采样、卫星和无人机成像、产量测图等感知技术服务,均呈现上升趋势。例如,网格和区域土壤采样经过10多年的发展,从只有大约一半的经销商提供服务,发展到2015年的67%和2017的82%,到2019年的89%。10年前,约一半的经销商提供变量施肥应用,2015年提高到69%,2017年提高至81%,2019年是88%。另外,90%的经销商使用自动导航和3/4的经销商提供基于GPS驱动喷杆/喷嘴控制的喷雾器[3]。
4.3 社会化与精准化服务融合发展
4.3.1 发展目标
国家农业支持政策是农业发展的基石[38]。纵观发达国家的农业政策发展历程,均根据当时的国内与国际的实际现状,进行调整和优化。因而,农机社会化精准服务体系应紧跟国家农业政策,着重支持农民实现节本增效,支持政府惠民措施与节能环保要求的落实。因此,农机社会化精准服务体系应服务于提高农业生产力、提高农产品国际竞争力、增加农民收入和服务于农业农村可持续发展,始终与国家农业政策的供给目标、收入目标、环境目标和社会目标相一致。
4.3.2 发展要点
农机社会化精准服务体系构建的要点是瞄准如何提高农民生产收益、促进农机社会化服务、落实政府惠民补助和相关监管要求。在某些方面(如肥药减施),农民的目标与政府的目标往往存在差异甚至矛盾,要推动相关措施的施行,就需要政府给予农民相应的技术支持或财政补贴,使二者相向而行。
当前,基于深松监测系统等数据,政府可以根据作业质量和作业面积向农民精准地发放作业补贴,但这种技术手段仍属于诚信监管层面,并没有实质性地提高农业生产的科技含量,肥药双减等重要目标仍然难以有效推进。鉴于此,本研究提出基于北斗系统提供的精确时间与位置,结合肥药变量控制器及其流量监测传感器,准确记录肥药施用量,政府据此给予达到目标的农业生产组织和农机服务组织相应的财政补贴,并以此引导农民积极采用肥药双减措施,推动相应技术装备的发展与应用。
4.3.3 体系结构
农机社会化精准服务体系的核心成员是农业生产组织、农机服务组织、相关农业主管部门以及第三方数据管理服务组织,农机社会化精准服务平台供应商、农机制造商和信息服务商要为精准服务的实现提供智能农机技术、装备与平台(图3 )。由此可见,该体系是一个复杂而完整的生态系统。
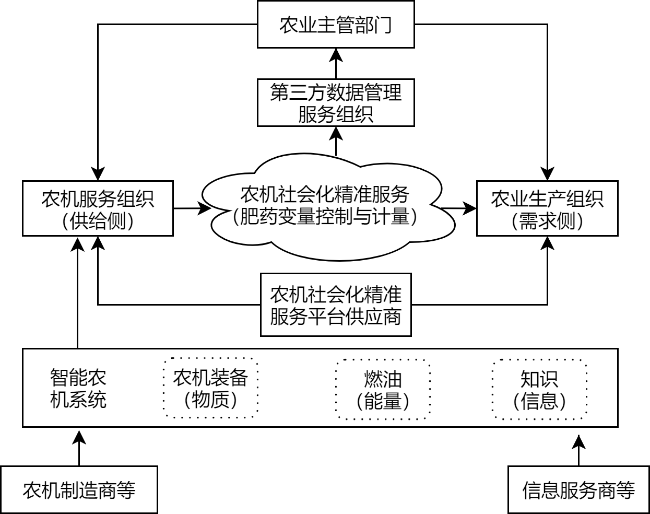
总而言之,农机社会化精准服务体系的设计应兼顾技术模式、应用模式和商业模式,应使得技术运用实现闭环、核心成员实现共赢、行业效益得到提升,真正体现科学技术的第一生产力作用。
4.3.4 关键技术设计
农机社会化精准服务体系的构建,主要包括以下主要关键技术。
(1)农机智能网关技术,用于现场数据采集和传输。该网关应基于ISO 11783协议,具备高精度GNSS定位、主机工况数据采集、机具作业数据采集、图像或视频信息采集和移动通信等功能,能够向数据的所有者、需求方或监管方提供数据定向传输服务。通过应用该技术,达到仅用一个智能网关实现主机及机具全部数据远程采集的目标。
(2)肥药变量控制与计量技术,用于实现和监督肥药双减、作业质量等。该技术基于流量控制工作原理,根据作业处方图,进行肥药精准变量施用,并将施用量通过计量传感器和智能网关回传至指定的数据平台。作业处方图制作的前提是掌握土壤养分、作物长势和病虫害等空间分布,并基于相应的决策系统进行肥药选择和确定其空间分配。
(3)数据管理服务技术,用于作业数据的管理与服务。数据管理服务系统由政府指定的第三方建设和维护,实现原始作业数据管理和作业量的精准统计与校验,配合政府进行作业抽检,为肥药减施等目标规划和技术指标的制订提供数据分析与支持服务。其中,大数据挖掘技术是数据管理服务的重要支撑,应通过大数据分析,及时、全面、准确地评估当前现状、区域差异和规划下一阶段目标与指标。
(4)专业应用服务平台技术,用于为农业生产组织、农机服务组织和农机制造商等提供平台服务,辅助操作手更好地运用智能农机系统,应具备资源管理、生产决策、作业计划、作业调度、作业监测和作业统计等功能。应用服务平台应能兼容不同的智能农机系统,为农机服务组织提供全面的生产管理服务。
4.3.5 体系作用
农机社会化构建可起到如下作用:
(1)可作为农机社会化服务结算和政府的农机作业补助发放的精准依据,并可通过系统整合,解决当前信息化系统林立,数据不共享,且效率低下的问题。
(2)有利于国家调整有关农业补贴政策。例如,购机补贴在农机化过程中起到了至关重要的推动作用,但其弊端也日渐显著,建立精准服务体系将有利于补贴政策从购机补贴向作业补贴过渡。
(3)有利于促进精准农业技术的全面应用。以肥药等农资的实际使用作为监管和补助的依据,既可以落实肥药双减等重要目标,同时又起到了推广精准农业技术装备的作用。
5 结论
农机精确导航技术正在中国大田种植领域得到规模化应用,但农机精准作业技术和农业生产精细管理技术的应用仍进展缓慢,精准农业服务体系尚未完成构建,农业生产的节本增效和节能环保等主要目标的实现仍缺乏科学的技术手段。
本研究提出以节本增效和节能环保为主要目标,融合农机社会化服务和农机精准化服务,发展中国农机社会化精准服务体系,在详细介绍了北斗系统及在农业应用的基础上,重点阐述了农机社会化服务体系的发展目标、发展要点、体系结构和体系作用。该体系是一个复杂而完整的生态系统,核心成员各司其职,以合作共赢的方式,实现精准农业技术的推广应用。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}