



1 引 言
本文深入研究了自动导航与测控技术在保护性耕作中的应用现状,特别是保护性耕作机具的自动导航技术、参数监测技术及保护性耕作机具作业控制技术等。其中,在保护性耕作机具的自动导航技术部分重点阐述了免少耕播种自动导航技术;在作业参数监测技术部分主要介绍了地表秸秆覆盖率快速检测技术、免少耕播种机播种参数监测技术和作业面积监测技术;在作业控制技术部分主要围绕免少耕播种机漏播补偿控制技术与作业深度控制技术展开介绍。最后,展望了保护性耕作机具的自动导航技术、作业参数监测技术和作业控制技术三者未来的发展方向。
2 保护性耕作机具自动导航技术
由于保护性耕作条件下的作物种植模式种类较多,因此本文以小麦-玉米一年两熟种植模式为例,围绕玉米茬地免少耕播种自动导航技术展开分析。在该种植模式下,小麦播种行距一般为20 cm,玉米种植行距一般为60 cm,玉米根系辐射半径约为3~5 cm,玉米植株分布的平均直线度误差约为0~2 cm。此外,当开沟器位于根系直径约10 cm区域内会将根茬连根拔起,由此可知播种机作业时的横向偏差仅为±5 cm[9]。如若超出这个偏差,则开沟器容易碰上粗大根茬,造成播种机堵塞、停机,严重影响播种效果[10]。即使驾驶经验丰富的驾驶员在精力集中的情况下也难以满足上述精度要求。综上,玉米茬地免少耕播种自动导航技术的示意图如图1 所示,利用自动导航技术引导播种机避开粗大玉米根茬,在两行玉米根茬行间免少耕播种小麦。图中红色曲线用于说明实际的玉米根茬行非直线,存在直线度误差,该图中的根茬行直线度误差为±2 cm。

玉米茬地免少耕播种自动导航技术中,根据自动导航技术的类型不同,可以分为接触式、机器视觉式和全球卫星导航系统(Global Navigation Satellite System,GNSS)式3种。
2.1 接触式免少耕播种自动导航技术
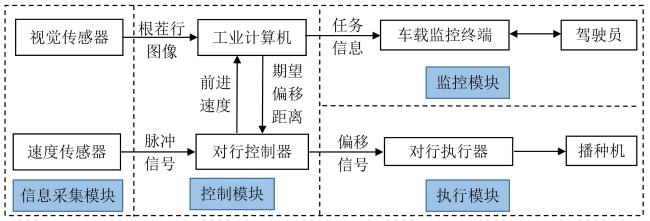
接触式免少耕播种自动导航技术采用探测装置产生路径信号,通过信号处理器处理决策出转向指令,控制执行机构完成路径跟踪,其工作原理如图2 所示(以玉米根茬作为探测目标为例)。

然而,接触式免少耕播种自动导航技术实现的前提是需要探测器与根茬接触,当根茬缺失时,容易导致探测信号缺失,且田间环境较为复杂,若碰上障碍物则会产生错误探测信号,无法实时准确测定农机具位置信息。因此,非接触准确实时检测目标位置信息的技术是解决上述问题的关键,也是亟待解决的难题。
2.2 机器视觉式免少耕播种自动导航技术
机器视觉式免少耕播种自动导航技术是将机器视觉导航技术直接应用于免少耕播种机上,从而避免从拖拉机做出转向到免耕播种机在拖拉机牵引下完成免少耕播种自动导航作业存在的滞后性,其采用视觉传感器拍摄田间图像获取路径信号,通过计算机处理决策出横移指令,控制执行机构完成目标路径跟踪,其工作原理如图3 所示(以获取玉米根茬行图像为例)。
目前,国内外在机器视觉导航方面的研究多集中在自动除草、自动喷药等方面[15,16],如瑞士Ecorobotix公司的除草机器人,美国Blue River公司的除草机器人等。针对采用机器视觉式免少耕播种自动导航技术在玉米留茬地进行小麦自动避茬对行播种的问题,国内研究人员开展了相关研究。陈媛[17]以玉米根茬行为研究对象,提出了一种适用于玉米高留茬收获且行间无秸秆覆盖条件下的玉米根茬行中心线检测方法,该方法能够有效地提取出玉米根茬行中心线,处理一幅分辨率为640×480像素照片的时间不超过0.1 s。李娇[18]在玉米根茬行中心线已检测的基础上重点设计了一种小麦免耕播种机自动导向控制系统,实现了根据玉米根茬行中心线与机具相对位置信息进行小麦避茬对行免耕播种,台架性能试验表明,该系统控制精度较高,最大误差角为1.5°。陈婉芝[19]研究了利用玉米联合收获机留茬收获后的根茬行直线检测方法,并在此基础上设计了一种自动避茬对行开沟控制系统,田间试验表明,当机具前进速度不超过1.2 m/s时,该系统能有效避开玉米根茬。
目前,机器视觉式免少耕播种自动导航技术在玉米留茬地自动避茬对行播种方面已得到一定应用,但由于玉米根茬与行间秸秆、裸露地表等背景颜色接近,加之农田环境复杂,玉米根茬行检测方法的准确性、实时性及鲁棒性仍需进一步提高。
2.3 GNSS式免少耕播种自动导航技术
与上述两种导航技术不同,GNSS导航技术获取的是农业机械在地理空间中的位置信息,并将其与预先规划好的路径进行对比分析,决策出相应运动指令控制农业机械完成对预先规划路径的跟踪,图4 为典型的GNSS式农业机械自动导航技术原理图。
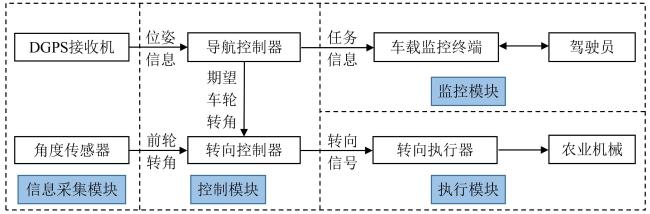
在GNSS式免少耕播种自动导航研究方面,国外典型代表有John Deere公司生产的AutoTrac自动导航系统[21]、Trimble公司生产的CenterPoint®RTX导航系统[22]等。此外,国外在作物全程机械化种植过程中基本全程使用自动导航系统,作业时便可生成作物位置信息处方图,因此其可根据上一阶段的位置信息进行实时路径规划,完成相关作业。目前,国内对GNSS式自动导航系统研究主要集中在路径规划、导航控制等方面,对导航过程中的实时位置信息处方图研究较少,加之由于播种精度、生长环境及玉米生长规律等的影响,导致玉米根茬行并非一条笔直的直线,因此作业时需要根据根茬位置进行实时路径规划。而GNSS导航技术虽然精度高,但在玉米根茬位置信息未知的情况下,其作业时只能按预先规划好的路径行驶,不能在作业过程中进行实时路径规划[23]。
综上,基于GNSS的导航技术当前尚不能直接应用在免少耕播种自动导航技术上,玉米根茬位置信息处方图的获取是GNSS式免少耕播种自动导航技术的关键,是亟待解决的问题。
2.4 免少耕播种自动导航技术对比与总结
上述3种不同类型的免少耕播种自动导航技术性能对比如表1 所示。
表1 三种类型的免少耕播种自动导航技术性能对比Table 1 Performance comparison of automatic guidance technology of three types for no/minimum tillage seeding |
| 导航技术 | 优点 | 缺点 |
|---|---|---|
| 接触式免少耕播种自动导航技术[24] | 1. 探测装置比较简单,精度较高 2. 生产成本低 3. 安装方便,易维护 | 1. 接触式测量,探测信号容易丢失 2. 容易受行间秸秆等障碍物影响 |
| 机器视觉式免少耕播种自动导航技术[25] | 1. 无需对外发射信号,灵活性强 2. 采集图像包含信息更为全面 3. 作业过程中可实时进行导航路径规划 | 1. 受环境中光照、行间秸秆等影响较大 2. 数据处理算法耗时长,实时性无法得到保证,且对计算机配置要求较高 |
| GNSS式免少耕播种自动导航技术[11,23] | 1.RTK-GPS(Realtime Kinematic)定位,精度高, 厘米级 2. 成本正在逐年降低 3. 全天候,覆盖范围广,易于集成 | 1. 玉米根茬位置信息未知的情况下,作业时只能根据预先规划好的路径行驶,无法进行实时路径规划 2. 信号易受环境因素(如大树、高大建筑遮挡,大气中电离层、对流层等)影响 |
目前,免少耕播种自动导航技术存在的问题主要包括三点:①玉米根茬行的检测方法尚不成熟,算法的实时性、准确性及鲁棒性较差;②避茬对行免耕播种控制策略并未达到最优,播种机开沟器运动控制策略的快速性、准确性及对复杂环境的适应性较差;③保护性耕作条件下的作物种植模式较多,而目前保护性耕作机具自动导航技术多集中在小麦-玉米一年两熟种植模式,适用的种植模式比较单一。
3 保护性耕作机具作业参数监测技术
保护性耕作作业环境较为恶劣,更易导致机具堵塞、免少耕播种机漏播和重播,以及作业面积监测效率和准确性较低等问题。而作业参数监测技术旨在将传感与检测、信息处理、图像处理等智能监测技术应用在保护性耕作机具上,对其作业参数进行实时监测,进一步提高机具作业质量。近年来,国内外保护性耕作机具作业参数监测技术的研究内容主要集中在地表秸秆覆盖率快速检测、免少耕播种机播种参数(如漏播、重播和播种量等)监测和机具作业面积监测等。
3.1 地表秸秆覆盖率快速检测技术
人工拉绳法是传统的秸秆覆盖率检测方法,该方法虽然准确率高,但效率低、劳动强度大、检测覆盖面小,近年来逐渐被智能化检测技术所取代。在秸秆覆盖率快速检测技术中应用较多的是图像处理技术,其检测流程为:首先利用摄像机人工拍摄、无人机航拍或卫星遥感等获取田间图像,然后通过一系列图像处理算法(灰度化、分割、形态学处理等)识别出作物秸秆,最后根据秸秆面积与总面积的比值计算出地表秸秆覆盖率。
学者们针对作物秸秆的准确识别进行了大量研究。Najafi等[28]结合Landsat OLI图像与全球卫星定位系统(Global Position System,GPS)的测量数据,应用基于对象的图像分析(Object-based Image Analysis,OBIA)方法进行作物残茬覆盖率计算,总体精度不低于91%。Hively等[29]结合陆地卫星和WorldView-3卫星图像,提出一种作物残茬覆盖检测方法,总体精度约为92%(±10%)。李洪文等[30]采用人工神经网络与纹理特征的熵值相结合的方法识别作物秸秆,其识别误差不超过5%。李佳等[31]利用快速傅里叶变换与支持向量机结合对秸秆进行识别和筛选,并与北斗定位模块、摄像头、传感器等组成车载地表秸秆覆盖率识别系统,该系统的秸秆覆盖率识别误差为4.55%,处理每张图像平均耗时0.05 s。苏艳波等[32]通过将灰度图像进行对数变换来提高其对比度,并采用最大类间方差法自动选取阈值以提高作物秸秆分割的准确性,分割误差控制在4%以内。刘媛媛等[33]针对无人机航拍采集的田间图像,提出了一种基于图像多阈值的自动分割方法(DE-GWO),检测地表秸秆覆盖率,其检测误差不超过8%。
与利用摄像机人工采集田间图像检测地表秸秆覆盖率相比,利用无人机航拍或卫星遥感图像检测地表秸秆覆盖率具有覆盖面广、检测效率更高的优点。然而,无论是前者还是后者,当前保护性耕作地表秸秆覆盖率快速检测技术研究仍存在以下问题:①由于秸秆与裸露地表颜色接近,且实际田间作业时光照、田间环境复杂多变,检测方法的准确性、快速性都仍需进一步提高;②目前,地表秸秆覆盖率的检测多为田间样本采集,实验室内处理分析,样本比较单一,且采集的保护性耕作地表图像多为特定场合,普适性较差。
3.2 免少耕播种机播种参数监测技术
免少耕播种具有作业过程全封闭的特点,因此仅凭驾驶员的视听无法保证其作业质量,容易发生漏播、重播等问题。此外,由于地面有大量秸秆覆盖,作业环境恶劣,更容易发生上述问题,严重影响播种质量。因此,对免少耕播种机播种参数进行实时监测尤为重要,当出现漏播、重播等问题时以便及时反馈给驾驶员,以做出相对措施,这不仅可以保证播种作业质量,提高作物产量,还可以缓解驾驶员人工肉眼“实时监测”的疲劳。
免少耕播种机播种参数监测技术是近年来研究较多也较成熟的领域之一,其基本原理是通过在排种过程中的某一位置安装传感器获取种子的运动信息,然后加以处理便可获取重播率、漏播率、播种量等信息。根据传感器工作原理的不同,可分为光电式、压电式及电容式三种播种参数监测技术。
3.2.1 光电式播种参数监测技术
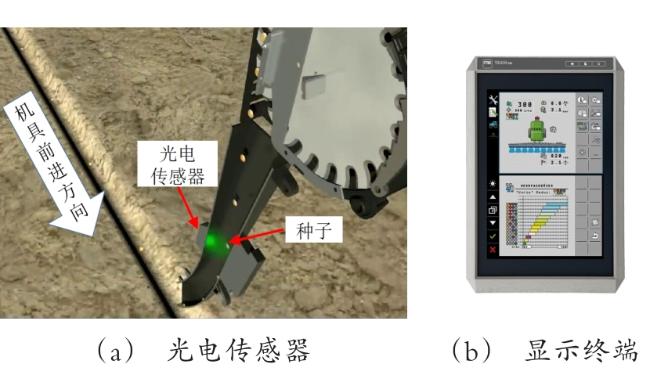
光电传感器是光电式播种参数监测技术的主要硬件设备之一,其主要由发射端和接收端两部分组成,发射端负责发射光线,接收端负责接收光线。光电式播种参数监测技术是将光电传感器的发射端和接收端分别安装在排种必经位置的两侧,构成排种监测区域,当种子经过该监测区域时,发射端发出的光线会被种子遮挡,触发接收端发出电信号,直到种子通过,电信号消失,根据相邻两粒种子下落的时间间隔结合农学相关知识便可实时计算出漏播率、重播率、播种量等播种参数信息。
目前研发光电式播种机播种参数监测技术的商品化企业和产品早已问世,如Horsch公司研发的Maestro_SW系列播种机播种参数监测方案(图5 ),将光电传感器安装在排种管中部位置,对种子的通过状态进行监测,并通过显示终端实时显示播种量、漏播率和重播率等[34]。
Amazone公司开发的ED系列精量播种机的播种参数监测方案(图6 ),其将光电传感器安装在排种器中种子即将下落区域,监测种子的通过状态,并在车载终端上实时显示漏播率、重播率、播种量等播种参数[35]。

John Deere公司开发了一种传送带式种子输送系统(图7 ),其在传送带外壳侧壁上安装光电传感器,实现对种子通过状态的监测,并通过显示屏实时显示播种量、漏播率和重播率等播种参数[36]。与上述两种在排种管或排种器上安装传感器实现种子通过状态监测的方案相比,该传送带式输送系统对种子通过状态的监测效果会更加准确,原因是当传送系统夹持种子通过传感器时,二者始终处于相对静止状态,而如果排种速度加快,上述两种监测方案会漏掉一些种子,造成监测准确率下降。

3.2.2 压电及电容式播种参数监测技术
3.2.3 免少耕播种机播种参数监测技术对比与总结
上述三种播种参数监测技术各有优缺点(表2 )。其中,与压电式及电容式播种参数监测技术相比,光电式播种参数监测技术由于具有较好的监测性能而被大量应用。
表2 不同类型播种参数监测技术性能对比Table 2 Performance comparison of different types of seeding parameter monitoring technology |
3.3 保护性耕作机具作业面积监测技术
保护性耕作机具作业面积监测技术是解决机具作业面积统计困难、现场核查工作量大、效率低和耗时耗力等问题的有效途径之一。其基本内涵是机具作业速度、作业时间及机具作业幅宽三者的乘积,而机具作业速度的准确监测是保证作业面积监测准确性的关键。常用的机具作业速度监测方法主要有两种,即基于转速传感器的作业速度监测技术和基于GNSS导航的作业速度监测技术。
3.3.1 基于转速传感器的作业速度监测技术
基于转速传感器的作业速度监测技术是通过安装在机具地轮上的转速传感器对地轮的转速进行监测,根据地轮单位时间内旋转的圈数及地轮直径便可计算出机具的作业速度,目前应用较多的是霍尔式转速传感器和增量式编码器。其中,前者一般在地轮上粘贴一对或多对小磁钢(分辨率与小磁钢的数量呈正相关),并将霍尔开关置于小磁钢附近,每个小磁钢转过霍尔开关时,便对应产生一个脉冲,根据单位时间内的脉冲数便可计算出机具的作业速度,其动态性能好,但价格较高[53];后者一般安装在地轮转轴上,记录转轴单位时间内的脉冲数,根据脉冲数与机具前进位移的比例关系便可计算出机具的前进速度,其分辨率高,但抗干扰性较差,且存在零点误差[54]。如董燕[55]采用霍尔式转速传感器设计了一种免耕精播机前进速度监测系统,孙永佳等[56]基于增量式编码器监测机具前进速度。
3.3.2 基于GNSS导航的作业速度监测技术
基于GNSS导航的作业速度监测技术是利用多普勒频移原理,直接得出机具作业速度,然后根据作业幅宽便可计算出机具在该时间内作业面积,GNSS导航同时还能获取机具的作业位置信息,从而避免换行作业时出现重复作业或未作业地块,不仅可以取消机械式划线器,降低机具制造成本,而且可提高作业精度和作业效率。近年来,研究人员提出将GNSS导航、通用分组无线业务(General Packet Radio Service,GPRS)技术等同时应用到机具上,以实现对机具的远程操作与管理。黄东岩等[57]利用GPS接收器获取播种位置和作业速度信息,同时通过GPRS技术实现信息的远程传输与管理。隋铭明等[58]基于北斗卫星导航设计了一种秸秆机械化还田作业管理系统,该系统可实时监测机具作业面积。
综上,基于转速传感器的作业速度监测技术具有监测精度较高、成本低及安装采集数据方便等优点,但其需要将转速传感器安装在地轮上,当地轮出现打滑时,监测精度就会大大较低,而保护性耕作条件下地表环境较差且有秸秆,更易出现打滑,导致速度监测精度较低;基于GNSS导航的机具作业速度监测技术由于无需与地表接触,因此即使在保护性耕作条件恶劣的情况下也具有较高的监测精度,但其价格较昂贵且安装较复杂。
4 保护性耕作机具作业控制技术
保护性耕作机具作业控制技术是指在监测机具作业参数的基础上,通过电子信息技术、自动控制技术、机电一体化技术和液压与气压传动技术等对机具的关键部件实现一定的主动控制,以满足作业要求(如播种深度一致性、深松深度一致性等),提高机具的作业质量(如减小漏播率)。免少耕播种机漏播补偿控制技术及机具作业深度控制技术是近年来在保护性耕作机具作业控制技术方向的研究热点。
4.1 免少耕播种机漏播补偿控制技术
减少播种机漏播率的传统方法是在作物出苗后进行人工补种,这种方式不仅会增大农民劳动强度,也会增加种植成本。而播种参数监测技术虽然能在一定程度上减少漏播率,但仍需驾驶员收到报警信号后下车进行调整,效率低。因此,免少耕播种机漏播补偿控制技术的研究对减少漏播率,提高播种质量,减少农民劳动强度和种植成本具有重要意义。
当前,国内外虽对漏播补偿控制技术有一定研究,但还存在以下问题:①大多补种装置都是加装在正常播种装置外,两套排种装置之间相互独立,结构比较复杂;②由于正常排种与补种排种时的种子运动路径不同,补种位置存在一定的滞后性,导致补种位置准确性较差。
4.2 保护性耕作机具作业深度控制技术
作业深度控制技术是保障保护性耕作机具作业深度一致性的必要手段,主要涉及免少耕播种深度、深松深度及表土耕作深度等。其基本原理是利用传感器实时监测机具的作业深度,将当前作业深度与预先设定的目标深度进行对比,若超过或未达到预先设定的阈值,则启动控制系统进行调控,具体是通过调节液压缸的伸缩或气压装置的压力来实现作业深度控制。
4.2.1 免少耕播种机播种深度控制技术
适宜的播种深度可以为种子提供较为充足的水分和养分条件,有利于缩短种子出苗时间,提高种子出苗率,同时可以减小机具作业阻力,减小能耗。国内外学者经过大量研究发现播种深度在3~4 cm且一致时最有利于出苗[62,63]。Karayel和Zmerzi[64]研究发现,即使在实验室条件下,播种深度都不一致,而在免少耕播种作业时,作业环境更加恶劣,如土壤未翻耕,地表有秸秆覆盖等更容易造成开沟器振动,导致播种深度不一致。传统的免少耕播种机多通过安装仿形机构并加装机械弹簧保持播深一致,但这种方式都是作业之前将仿形机构、弹簧预紧力等调整好,无法根据作业环境的变化在作业过程中进行播种深度实时调节。因此,能够在播种作业时对播种深度进行实时控制的技术与装备得到国内外研究人员的关注与研究。
目前,国外知名农机公司大多都在其播种机上安装播深控制系统,工作原理如图8 所示,采用液压或气压装置代替传统播种机上的机械弹簧,通过压力传感器实时监测限深轮下压力,并与预先设置的压力值进行比较,自动调节播种下压力,保证播种深度一致。如Ag Leader公司的SureForce™下压力控制系统[65],Maschino的Maximetro系列播种机[66],Horsch的Maestro SW系列播种机[34],John Deere公司的exactEmerge播种单体[36],Precision Planting公司的Deltaforce和AirForce下压力控制系统[67,68]及Kinze公司的TrueDepth™播深控制系统[69]。

此外,国内外学者也对播种深度的精确控制开展了一系列研究。根据调节装置的不同将其分为两大类,即液压调节和气压调节。其中,液压调节因具有响应速度快、产生推力大、便于安装等优点在保护性耕作机具作业深度智能化调控上应用更为广泛。除通过安装液压或气压装置实现播深调节外,李玉环等[71]设计了一种覆土-镇压联动监控装置,采用电推杆实时调节覆土量实现播深一致性控制。由于播深调节装置类型比较明确,因此播深控制系统的研究重点主要在播深检测上。为实现播深准确实时地检测,学者们研发了多种播深检测法,均取得较好的检测效果,根据采用传感器的工作原理不同将其分为剖面传感器检测法[72]、超声波传感器检测法[73,74]、角度传感器检测法[62]、压力传感器检测法[75-77]、以及位移传感器检测法[78]等。
4.2.2 深松及表土耕作机具耕作深度控制技术
保护性耕作机具的耕深一致性是评价其作业质量的一项重要指标。美国John Deere公司经过多年试验发现,耕作深度一致性对土壤保水保墒、构造良好的种床具有重要影响[79]。目前,耕作深度控制主要利用角度或超声波传感器实时检测耕深,同时在深松铲、圆盘耙和镇压轮等触土部件上安装液压系统,通过调节液压缸的伸缩实现耕作深度的一致性控制。
John Deere公司的TruSet耕整地装备耕深控制系统(图9 )利用安装在地轮与机架上的耕深监测传感器获取机具的耕作深度,并将其与预先设定的耕作深度值进行对比,然后通过配套的液压系统实现圆盘耙、深松铲和镇压辊等耕作部件的耕深控制,作业情况会实时显示在人机界面,用户还可根据自己需要进行手动调节,该系统控制耕深精度不超过2.5 mm[80]。

Case公司研发的整地机械耕深智能控制系统(Advanced Farming Systems,AFS)(图10 ),能够根据土壤条件(含水率、紧实度、秸秆覆盖率等),实现机具耕作深度的精准控制。作业前,将根据土壤条件预先设定好的耕深信息处方图导入系统,拖拉机上配备基于GNSS的导航系统,当机具走到处方图相应位置,液压系统就会根据处方图中耕深信息自动调节机具关键部件使其达到预设耕深,同时液压缸内的行程监测传感器能够实时反馈液压缸活塞的长度变化,保证耕深的精准控制[81]。

综上,无论是播种深度还是耕作深度的实时控制,其最终目标都是实现作业深度的一致性。二者的控制原理基本相同,即利用传感器实时监测开沟器、深松铲、圆盘耙、镇压辊等触土部件的作业深度,并与预设作业深度进行对比,通过液压系统或气压系统调节作用在触土部件上的压力实现作业深度的控制。
5 结论与展望
在保证可靠性的前提下,高效、高质是保护性耕作机具的发展方向,同时,能够实时根据作业环境变化进行智能作业也是发展趋势。虽然当前自动导航与测控技术在保护性耕作机具中应用较多,但仍存在以下问题需要将来重点关注和解决。
(1)保护性耕作机具自动导航技术。以小麦-玉米一年两熟种植模式下的免少耕播种自动导航技术为例,一是加强自动避茬对行免耕播种方面相关算法的研究,包括图像处理算法、卫星信号解析算法和目标路径跟踪控制算法等,提高算法的实时性、准确性及鲁棒性;二是开展基于GNSS导航技术的实时免少耕播种作业路径规划研究,即在免耕播种前获取根茬位置信息生成处方图,结合GNSS导航技术进行实时导航,以实现自动避茬对行播种;三是开展基于组合导航的自动导航技术研究,国内在拖拉机或免耕播种机自动导航技术方面具有较好的研究基础,而对拖拉机-免耕播种机组合自动导航技术的研究较少;四是研发适用于各地种植模式的免少耕播种自动导航技术。
(2)作业参数监测技术。一是研发适用于保护性耕作条件下的传感器,进一步提高传感器的检测精度及使用寿命;二是加快保护性耕作与导航定位、数据无线传输、远程管理与控制、5G等技术的深度融合研究,不仅能够实现远程监控与管理,而且能够将作业信息上传到远程服务端,为建立中国智能化保护性耕作机具作业信息大数据平台提供基础;三是进一步研究田间秸秆覆盖率的快速实时、准确、普适的检测算法与设备,如智能手机+智能算法。
(3)保护性耕作机具作业控制技术。一是研制结构简单、准确性高的漏播补偿控制系统;二是研究耕作机具各个耕作部件的独立控制技术,进而实现根据作业环境不同(包括土壤类型、地形、地表秸秆覆盖率、土壤含水率、土壤紧实度等)进行耕深实时调节;三是加快我国保护性耕作机具作业控制设备产品化、系列化、标准化,并不断提高其通用化程度。
总之,虽然自动导航与测控技术在中国保护性耕作中应用的起步较晚,与国外还有一定差距,但其具有巨大的发展空间和发展意义。在智慧农业背景下,自动导航与测控技术在保护性耕作机具上的应用要想又好又快发展,还需要相关领域科学家的共同努力,将智能技术(如导航技术、传感与检测技术、图像处理技术、计算机技术、自动控制技术等)、农艺知识与理论、传统保护性耕作技术与机具三者进行深度融合,使保护性耕作机具向高效化、高质化、精准化、智能化方向快速发展。






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}