



1 引 言
农业机械化和农业装备是转变农业发展方式、推动农业可持续性发展的重要基础,是推进农业现代化建设的重点领域和核心支撑。2013年,习近平总书记在视察山东省农业科学院时强调,要重视和依靠农业科技进步,大力推进农业机械化、智能化,给农业现代化插上科技的翅膀[1]。2018年,《国务院关于加快推进农业机械化和农机装备产业转型升级的指导意见》做出了“农业生产已从主要依靠人力畜力转向主要依靠机械动力并进入了机械化为主导新阶段”的重要判断,指出了“当前农业机械化和农机装备产业发展不平衡不充分”的突出问题,明确了“推动农机装备产业向高质量发展转型和推动农业机械化向全程全面高质高效升级”的总体要求[2]。《乡村振兴战略规划(2018—2022年)》也指出,要着力加强重点关键技术攻关,推动数字化、智能化等先进技术与农业机械化的深度融合,显著提高农业机械有效供给能力,引领现代农业高质高效发展[3]。落实上述文件精神,认真了解国外农业机械研究与应用现状,进而找准中国农业机械化发展的攻关目标,对于推进中国农业高质高效发展具有重要意义[4,5]。
当前,中国处于农业现代化建设的重要时期,对智能农机装备的需求也在持续增长。然而国内现有农业机械装备智能化水平低,与现在的自动化与高效率作业需求不符,不利于中国农业现代化的快速发展。未来一段时期,我国农业装备发展面临新机遇、新需求、新挑战,农业装备制造还有广阔的发展空间,因此,加强农机装备的智能化创新,用信息技术提升中国农业机械化水平,成为当前农业机械化发展紧迫又至关重要的任务。
信息技术的主体技术包括计算机技术、传感技术、现代通信技术以及智能控制技术等。信息技术的发展正推动着全球经济整体跃升和生产力的跨越式发展,助推产业链、供应链和价值链重塑,使之焕发新的生机与活力[6]。农业信息技术指的是以农业科学的基本理论为基础,以农业生产活动信息为对象,以物联网、大数据、人工智能等为代表的信息技术应用在农业生产中,最终实现农业领域向智能化、精确化和数字化方向发展的方法[7]。当前,中国以物联网和大数据为主的农业信息技术应用发展迅速,由于中国农业机械化起步较晚,与信息化融合度还较低,与国外发达国家相比还存在差距。农业机械与信息技术融合是现代农业发展的必要手段,能够提高农业资源利用效率,保障现代农业的健康可持续发展,加速推进农业现代化的进程。
2 国外农业机械与信息技术融合发展主要特点
上世纪九十年代,美国、德国、日本等经济发达国家的种植业和养殖业已进入高度机械化阶段,农业机械已向自动化、信息化和智能化方向发展[8],在农机现代化和信息化方面拥有较好的基础和技术积淀。国外农业机械与信息技术融合发展的主要特点概括为以下五个方面。
2.1 向数字化、自动化、信息化方向发展
近年来,数字信息化技术在全球农业领域应用步伐加快,农业机械化生产与信息技术深度融合,先进的农业信息智能感知技术和智能农机发展迅速。
美国数字农业发展建立在农业生产高度专业化、规模化、企业化的基础上,信息化技术渗透到了美国农业生产、加工、运输、销售的各个环节,直接促成了美国“精确农业”的兴起,极大程度上提高了美国农产品的国际竞争力。自20世纪90年代起,美国已开始应用卫星遥感等数字农业技术对大田作物进行生产全周期的监测与管理,在21世纪初已在大型农场中实现了“3S”技术,即遥感(Remote Sensing,RS)、地理信息系统(Geographic Information System,GIS)和全球定位系统(Global Positioning System,GPS),以及网络信息服务、智能机械系统的综合应用[9]。美国科研部门和大型农机企业已经将网络通讯、电子计算机及卫星遥感等现代信息技术应用到大型农机具上,实现拖拉机等农机的自动避障、自主作业、路径规划等自动化、智能化农业机械作业。生产机械化辅以管理信息化,越来越多的劳动力被替代下来,农业生产效率进一步提高。
德国大型农场均配有多样性的农业机械设备来满足生产需要,农场经营者素质普遍偏高,管理非常现代化。从德国现代农业发展的应用来看,主要集中在计算机知识模型、杂草自动识别以及病虫害的诊断监控等多项技术。德国政府对于农业机械化极其重视,农机企业也十分重视农业机械的现代化生产,比如科乐收公司(CLAAS Group)拥有多条高度智能化的生产线,这些生产线上每一道工序都可通过射频识别(Radio Frequency Identification,RFID)技术进行全程追溯。随着越来越多高科技技术在农机上的应用,企业设置专门的技术培训中心对驾驶操作人员的操作技能进行培训,提高了农机设备效能的发挥[10]。
日本为应对农业资源环境与劳动力短缺的困境并提高农业竞争力,重点推进现代信息与通讯技术在家庭农场作业中的应用,实现农业生产的自动化与智能化,逐步形成了较为成熟的适度规模经营型精细化农业生产模式[11]。比如,井关农机公司(ISEKI & CO., LTD.)与政府联合研发了新型智能插秧机,这种插秧机可以通过传感器确定行驶路线,即便是遇到淤泥也能自动调整方向。此外,为了防止过量施肥影响作物品质,这种插秧机可以通过土壤电导率测量传感器检测土壤的深度及有机质含量,从而实现插秧与变量施肥同步。为解决农户精准农业技术应用成本高、农户经营分散等问题,日本农业协会为农民生产农产品进行产前、产中、产后的全程服务,并促进精准农业技术的普及与利用。
2.2 信息技术广泛应用于农业机械设计与生产制造环节
2.2.1 数字化设计
智能制造的关键是数字化设计与制造。数字化设计技术是指通过产品描述为基础的数字化设计平台,在产品的开发和应用过程中建立以信息技术为基础的数字化计算机产品模型[12],不断对开发方式持续优化,达到使设计成型的机械设备更具实用性、创新性并有效降低模型应用的一种新型产品开发技术。
在现代数字化设计中,产品模块化设计、虚拟仿真与虚拟试验验证、知识工程技术(Knowledge Based Engineer,KBE)、基于PDM/PLM(Product Data Management/Product Lifecycle Management)的协同设计等相关技术在国外已经开始应用。为提升新颖性与创新性,提高农机产品研发效率,国外如爱科(AGCO)、约翰迪尔(John Deere)、久保田(Kubota)等农机巨头公司在新产品开发的不同阶段普遍采用创新设计理论和方法,数字化设计技术也得到广泛应用。这些农机企业的产品开发模式也从集中式转向分布式,特别是产品全生命周期PDM管理系统和基于网络的产品描述模型的应用,逐渐建立了以PDM/PLM为支撑、结合高端工程技术的优质产品研发体系和知识积累平台[13]。采用现代数字化设计技术不仅提高了产品技术水平,而且缩短了产品开发周期,降低了开发成本。
2.2.2 先进制造技术
农业装备使用可靠性和耐用度不足是中国农业机械的薄弱环节,也是中国农业装备在国际上话语权不强的主要因素。先进制造技术在各个国家高端农机生产中的作用十分重要,是促进农机创新能力和制造水平,加快当今世界现代农业建设步伐的关键。
国外农机企业特别关注产品的使用可靠性和耐用度[14],重点研发了农机部件的金属材料、加工工艺以及关键部件的精密制造技术,用汽车生产加工的技术去制造农机具的部件和装备。在发达国家农机企业车间内,高柔性的自动无人生产线、先进的制造产业线已成为主要生产手段,自动焊接及精密装配机器人、精密锻造等先进技术应用广泛。先进的制造技术如敏捷制造、并行技术、虚拟制造技术和智能制造技术的应用可以充分保证制作过程的一致性,实现生产环节全程可追溯。智能化生产线、制造模式柔性化、制造技术的敏捷化帮助提高生产制造质量、效率和安全性,高度智能化的制造加工系统使得员工仅仅通过操纵软件程序等即可轻松地完成生产加工任务。
2.3 畜牧机械信息化发展迅速
2.3.1 饲草生产机械

2.3.2 饲料加工机械化
法国KUHN公司是世界著名的牧草收获和饲喂搅拌农机生产商,现成为田间农业耕作机械、精密播种机、牧草机械、饲料搅拌机与植保机械的大型综合性农机具制造商[23]。KUHN的SPV系列自走式饲料搅拌机,具有取料头下降速度的电子控制及液压搅龙优化管理系统。取料头在青贮料堆藏表面的下降速度可以根据所装载作物的密度进行自动调整,可以保持纤细作物的颗粒大小均匀。从机械方面来看,减小了机器结构上的应力,同时保护液压回路以防达到压力峰值。搅龙独立于其他机器组件,能够在达到所需的料位时开始搅拌,因此能够保持青贮等纤细作物的纤维度指标,同时可以存储并控制不同日粮的搅拌时间,从而降低了过度搅拌的风险。搅龙转速和发动机转速实际上由所选的模式决定,自动搅龙转速管理能够对油耗进行全面控制。在驾驶辅助方面,可以对功能顺序进行编程,在“饲喂”模式下为驾驶员提供辅助。
2.3.3 犊牛饲喂机
德国Urban公司生产的Calfmom U40自动犊牛饲喂机可以自动为牛犊配制、加热饲喂的牛奶,还配置了自动添加药物系统[24]。饲喂机上装有质量传感器可以对剩余奶量进行精确称量,可以对牛犊饮用的进程进行监测。饲喂机上先进的饲喂管理系统可以让饲养员直观地用电脑控制犊牛饲喂。犊牛饲喂机配备犊牛自动饲养软件管理系统,记录每头犊牛的个体饲喂信息并进行数据分析,还配置了电脑式操作显示终端,可方便进行犊牛注册、检查、机器设置等操作。饲喂管理系统具备“随意、个体、保留”三种饲喂模式,可设置8种进料曲线饲喂方案,便于针对不同犊牛情况设置不同饲喂方案,更加贴合犊牛的生长发育。
2.4 注重资源节约和环境保护,信息化促进农业可持续发展
农业机械化与信息化的融合发展有利于促进农业生产成本节约和生态环境保护。现代农业生态环境问题主要指人们对自然环境的干预和农业现代科技成果的应用带来的资源浪费和环境破坏。传统农业机械的作业方式智能化水平低,如施药或施肥机械多采用不间断恒量喷药或施肥作业模式,造成农药飘移和土壤板结的生态污染问题,严重影响到农业的可持续发展。
2.4.1 土壤养分探测
精准施肥的一个基本要求是首先要取得详尽的土壤及作物养分信息。精准土壤采样技术是获取土壤养分信息的重要手段,主要将农田土壤进行网格划分,以一个地段内各单元网格采取土壤养分测定值为依据,结合土壤供肥特性、农作物需肥规律和肥料田间效应,绘制农田精准施肥处方图。
美国Veris Technologies公司的iScan+ 多参数土壤理化性质测绘系统可以通过实地原位测量土壤的电导、温度和湿度值,此系统适用于精准农业、土壤调查及土地利用规划等领域[29]。利用GPS定位和数据处理测绘软件,绘制出土壤理化性质分布图,全面反映土壤盐碱度、土壤肥力、根系深度、土壤表层温度等重要信息。通过测定土壤具体参数,了解土壤肥力信息及是否有金属污染,为土地生产能力及产量预测提供重要依据,与GPS信息相结合可绘制田地土壤成分空间分布图,方便制定精准施肥处方图从而实现田间的变量施肥,对提高经济效益以及减少环境污染等具有重要意义。
2.4.2 变量施药
变量施药技术是采用全球导航卫星系统(Global Navigation Satellite System,GNSS)、GIS或实时传感器技术获取农田分块区域内病虫草害的差异性并制定不同区域的目标施药量,通过调节压力或流量大小等不同控制方式实现按目标施药量进行喷药作业[30]。与传统的大面积均匀喷施技术相比,变量喷施技术能够提高农药利用率、降低作业成本并减少环境污染。变量喷雾机在国外精准农业技术中应用逐渐成熟,是现代植保机械的重要发展方向。
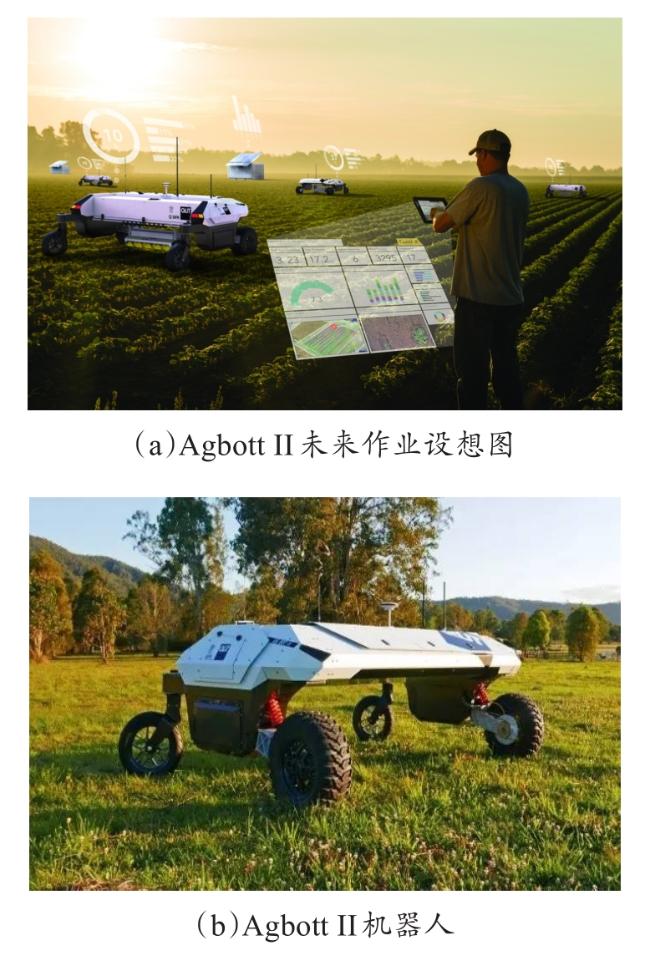
美国、欧盟和日本等国在施药技术上结合信息化技术可实现精密、高对靶性及定量施药,平均农药利用率在50%以上[31]。澳大利亚昆士兰科技大学研发出一款自动除草和施肥的机器人——Agbot II(图2 ),它身上搭载先进的机器视觉自动识别系统,可精确分辨杂草与作物,在杂草检测和分类上的总体成功率超过90%[32]。Agbott II采用太阳能供电,更加有利于节能环保,节省农民预算。此外,Agbot II搭载的先进传感器、软件和其他电子设备可以使机器实现自动导航,对作物和杂草进行检测和分类,并针对不同类别的杂草自动选择机械剪除或化学施药的方式来精确除草。除此以外,该机器人也可以用于精准施肥。在未来的版本中,该机器人还可以在执行操作时反馈有关土壤和作物的健康以及病虫害等数据信息。
2.5 向控制智能化、操作自动化和驾驶舒适化方向发展
农业机械装备通过不断改进提高再创新,其质量水平也不断提升。农业机械上采用高度自动化的智能化辅助装置,不仅可以提高田间工作效率,节约运营成本,增强驾驶员的舒适感受,而且能提高产品在国际市场上的声誉和市场竞争力。控制智能化、操作自动化和驾驶舒适化是精准农业智能装备发展的重要方向。
2.5.1 控制智能化
国外著名农机企业产品大多采用基于ISO 11783的ISOBUS农用机械串行控制和数据通信标准总线技术,此标准详细规定了智能农机的控制系统网络整体架构、功能ECU(Electronic Control Unit)、CAN(Controller Area Network)总线通信及任务控制器结构等。总线技术的发展实现了农业机械控制器之间的信息共享,为农机装备的控制智能化提供了重要基础[34]。科乐收公司的自动转向系统GPS PILOT配有集成10.4英寸的触摸屏和双频接收器的S10终端,还具有操作自动转向系统、可控制接入ISOBUS的机具等功能。约翰迪尔公司的ISOBUS TIM(拖拉机工具管理)系统可以同ISOBUS设备结合控制拖拉机自动转向。该系统为即插即用模块,可在多台机器上移植使用,也可对现有系统进行升级。
在植保机械的控制智能化方面,加拿大NORAC公司设计了一种能使喷杆根据地形轮廓自动进行调整的UC5喷杆控制系统[35]。其装载的超声波传感器可对高度变化迅速做出反应,可在复杂地形作业中保持喷杆的离地高度,使喷头维持在最佳的喷洒位置进行均匀施药,减少农药在喷药过程中的漂移。UC5控制系统的识别模式有三种,分别为土壤模式、农作物模式和混合模式。三种模式可随时切换来感应土壤面或农作物高度,自动进行喷杆高度调整。此外,系统包含主动旋转角度控制组件,使得喷雾机在变化多端的地形上驾驶,旋转和控制中心部分也会增加两翼的起升速度。这个控制系统有效降低了驾驶者的工作压力和疲劳程度,当在不平坦的农场地形上喷药时,可不用注重地形的实时变化,从而将更多精力放在喷药工作和安全作业上,大大提高了工作效率和作业安全性。
2.5.2 操作自动化
目前,农业装备的卫星导航技术起到了作业过程中的辅助驾驶作用,能减轻操作员疲劳,使得操作变得自动化。约翰迪尔AutoTrac自动导航系统可以安装在各种农机装备上进行田间作业,比如用于整地、播种、施药、收获等作物全周期的田间作业,起到按垄作业或走直线的效果,提高了操作便利性。最新StarFire6000接收器使用的SF3卫星差分信号精度为±2.5 cm,兼容GPS、GNSS(Global Navigation Satellite System)和北斗等全球导航系统,与载波相位差分技术(Real-time Kinematic,RTK)设置基站方式相比,SF3信号不仅不需要RTK基站等基础设施的投入,不受无线电和网络局限,并且内置地形补偿模块,可以确保坡地作业时的准确性,特别契合跨区作业需求。SF3卫星差分信号对作业路径有存储功能,可实现一年内作业路径可重复。系统对越过遮盖区域后的信号搜索能力很强,能在通过遮盖区域后快速恢复信号状态,此外自动导航系统还采用多卫星跟踪来保障信号的稳定性,配合iTEC Pro转向路径规划模块,可使作业车辆在最大转弯速度下实现最小转弯路径规划。卫星导航技术的快速发展极大促进了现代农机装备的操作自动化,卫星导航提供的辅助驾驶功能大大提高了作业效率与作业质量。
经济作物收获机械采棉机的技术发展是技术难点,约翰迪尔CP690自走式打包采棉机(图3 )目前可实现不停机作业、边采摘边打包的功能[36]。该采棉机采用ProDrive自动换挡变速箱和防打滑系统等来确保田间作业时稳定的前后牵引力。驾驶室多功能控制杆采用模块化设计,一触式操作即可实现棉包卸载。这种采棉机加注液体1次(柴油、清洗液和润滑脂)可以不间断工作12小时,1分钟内从采摘模式切换到运输模式,辅助劳动少,实现了采棉机的连续作业,效率提高了20%~30%。此外,采棉机配备RowSense对行行走系统,能自动控制机器田间作业转向,不仅使得行距中心线与采摘头中心线对齐,保证采棉机准确按照播种路线行走,还有利于黄昏和夜间的对行采摘作业,减轻人的疲劳强度。CP690棉花采收机标配籽棉含水量实时动态监测系统,湿度传感器安装在棉花打包器上,在棉花打包过程中连续测量籽棉的湿度,驾驶员能通过湿度传感器采回的含水率数据实时调整轧棉效率,有助于保证棉花打包的质量。采棉机整车智能化、信息化水平高,监测控制系统可实现智能控制、自动监测、故障自诊断和危险报警等诸多功能,有效保证了棉花采收质量和作业效率。

2.5.3 驾驶舒适化
国外大型农机企业的市场营销理念在逐渐变化,从以往通过产品推销的传统方式过渡到注重解决客户问题的营销理念上来[37]。注重农业装备的驾驶舒适化已经成为国外农机企业关注的重点之一。德国菲茨曼农机公司(Fritzmeier Group)设计一种个性化的驾驶室需要三年左右的时间,其中包括一年半的安全测试和性能试验时间。测试项目包括顶棚抗挤压安全、振动舒适性能测试等,测试期间对采集的数据进行数据记录与分析,不断优化设计方案[38]。国外的部分拖拉机,如纽荷兰TL-A系列轮式拖拉机、挑战者MT系列履带拖拉机等驾驶室地板铺设加厚覆盖层,驾驶室内部采用吸音、隔热材料,能有效隔离室外温度并降低噪音,驾驶室噪声均达到75 dB(A)上下,已经接近汽车标准。拖拉机驾驶室大多宽敞明亮,驾驶员在工作时可拥有更大方位的视角,带有减震器的悬挂式座椅可调整,为驾驶员提供一个安全、舒适的作业环境。驾驶室内操作面板和操控杆均匀分布在驾驶员的两侧,操纵配置更加合理,使驾驶员可根据不同体型及驾驶习惯调节位置。除踏板外,驾驶员两侧有多功能操纵杆、水杯座及折叠式副座等,副座多有安全防护装置等。
3 中国农业机械化发展现状
3.1 农业机械化发展取得显著成效
改革开放以来,国家部署实施大量农业装备科技创新项目,中国农业机械化水平不论从机械装备数量上还是农机装备技术上都呈现稳步提高的趋势。中国已成为世界第一农机生产和使用大国,实现了从主要依靠人力、畜力到主要依靠机械动力的农业生产方式转变,也正处于从传统农业到现代农业转变的关键时期。从整体上来看,中国的农业机械化已经得到了长足发展,农业机械化产品呈现多元化发展趋势。
3.1.1 中国农业机械数量和农机作业面积大幅提高
3.1.2 农机作业服务组织数量不断增长
3.1.3 主要农作物薄弱环节机械化快速推进取得了显著成效
种植和收获机械化是中国农作物生产中突出的薄弱环节,如水稻的插秧、抛栽和直播环节、玉米的籽粒直收和马铃薯的收获破损率高、棉花机采损失率偏高等。“主要农作物生产全程机械化推进行动”实施以来,企业、高校、科研院所等都在不断加大薄弱环节机械化新技术和新机具的研发力度,积极探索主要农作物的机械化生产模式,取得了显著成效[45]。水稻机械化播种和插秧种植面积持续提高,东北地区和江苏水稻种植基本实现机械化;玉米柔性揉搓式脱粒机理和关键脱粒机构研发进度加快,籽粒直收试验示范开始起步;马铃薯的改良联合收获机械稳步推进,主产区各单项环节机械化作业已经具备较高水平;棉花生产全程机械化水平加速提升,采棉机摘锭生产等关键技术、制造工艺取得突破,一批国产采棉机开始批量生产,适宜全程机械化生产的机采棉模式逐步成熟并得到较快推广[46]。
3.1.4 农机农艺融合加强,适应机械化的良种、良法加快应用
农机农艺的融合主要是为了创造高效的农业机械化作业体系,通过农艺指导农机发展方向,再由农机作业实现农艺的相关要求。近年来,各级农业管理部门加强对农机农艺结合工作的实施,不仅强化了农业机械对于农艺的改进,还要求农艺技术向着标准化、科学化方向发展,有效促进了农机与农艺技术相互推动的协调发展[47],既确保了农业耕种制度与农业机械相匹配,又确保了农业机械满足农艺技术的种植和收获要求。
以中国棉花主产地新疆地区为例,基于棉花主产区的气候土壤特点,实现高效机械化生产为目标,新疆建立了特色鲜明的棉花生产全程机械化技术体系,突破了棉花生产全程机械化农机农艺融合关键技术。如图4 所示,研发出耕整地、精量播种、高效喷药、机械采收等关键技术装备,自主开发了种床整备、立体喷施植保、高效籽棉贮运等农艺技术措施。农艺与农机的深度融合,形成了特色鲜明的棉花生产全程机械化技术体系,显著提升了棉花生产水平。该技术体系在新疆应用面积超过了80%,带动了中国棉花生产整体水平进一步提升。

3.1.5 农机科技创新加快,高效、精准、节能型智能装备研发制造取得一定进展
相比起发达国家,国内目前尚缺乏成熟的产品,虽然国内学者一直在进行智能农机装备的研究开发,但精度、可靠性、多环境下的适应性较差等问题使得国内离大面积推广使用还有差距。
3.1.6 农业机械装备信息化技术取得积极进展,实现了农机作业实时远程监控、轨迹存储、车辆档案管理等功能
通过多农机作业情况的实时监控与记录,及时获得农业大数据,建立农情数据库。天津、吉林等地建立了深松作业监测系统,对农业生产环节机械化作业的实时监控,利用全球卫星定位技术、计算机网络技术、物联网技术和服务平台,实现对农机具作业质量监管与跨区作业调度[48]。黑龙江七星、红星等农场陆续建立了农机作业管理信息系统,实现了远程的农机作业路径跟踪定位、农机作业视频监控、机车统一调度指挥、机车维护与保养和网络视频会议等。
3.2 科技创新在促进区域农业机械化高质高效发展的作用突显
近年来,中国农机作业质量快速提升。针对各地作物种植类型和农机需求类型的不同,国内农机企业不断推进农机装备创新,研发适合不同地区农业和农民需要,先进适用的各类农机。农机和农艺融合、系统化研究、全程机械化的创新理念逐步被广泛接受。
以中国新疆地区棉花生产全程机械化技术为例。1979年,新疆石河子垦区棉花种植引进了地膜覆盖技术,通过与不铺地膜种植试验对比,棉花可以增产35%。虽然地膜种植模式大幅提高了增产效益的,但人工作业效率低的问题导致地膜种植模式难以大面积推广,亟须研发先进适用的地膜植棉机械。通过铺膜播种机的创新研发,实现了从成果到产品的转化,系列产品迅速得到推广应用,新疆兵团皮棉平均单产由1982年的579 kg/hm² 发展到1994年的1230 kg/hm²。20世纪90年代后期,在棉花地膜种植的基础上,新疆生产建设兵团提出了基于机采棉条件下,植棉全程水肥调控的膜下滴灌、精量播种栽培新农艺[14],为此研发了一次作业即能完成种床整理、铺管铺膜、精量播种、种孔覆土等8道工序的新机具,达到了播量精确、播深一致、株距均匀、适应机采和高密度的农艺技术要求(图5 )[50]。2003年,机具通过省部级科研成果鉴定,整体达到了国际先进水平。棉花膜下滴灌精量播种技术与装备在新疆全面推广,皮棉平均单产进一步发展到2014年的2335.5 kg/hm²。

近年来,新疆以机械化采收为主线,集成种子处理、种床整备、精量播种、脱叶催熟、机械收获和储运加工等关键技术,建立棉花生产全程机械化技术体系,实现规模化推广应用。新疆兵团农业生产机械化与信息化相结合,特别是在棉花生产各个环节中实施以“精细耕整地、精准播种、精准施肥、精准灌溉、精准田间生态监测、精细收获”为主要技术内容的精准作业系统,提高自动化与智能化作业水平、作业质量和劳动生产率,实现棉花生产的提质增效。2018年,全国棉花种植面积5.0285×107 hm²,其中新疆3.737×107 hm²,占全国比例达到74.3%,表明新疆已成为中国最大的优质棉生产基地。
3.3 农业机械与信息技术融合不足
中国农业机械化发展虽然取得了显著进步,但国家实施乡村振兴战略,推进农业农村现代化,对农业机械化提出了新的更高层次的要求。综合分析,中国农业机械化和农机装备产业发展还不平衡、不充分,一些深层次的矛盾和问题亟待解决[51],智能化与信息化水平还很低,与发达国家相比还存在明显差距。主要表现在以下四方面。
一是农机信息化融合的区域及结构发展不平衡。不同于国外农机发达的国家,中国地域辽阔,农业生产区域复杂多样,地理环境差异、农作物种类的多样性及种植模式的差别决定了对农业机械装备需求的多样性。比如,很多丘陵地区受地势形貌的影响,很难进行规模化的机械生产与采集,农业信息化的发展缺乏必要条件,导致全国农机信息化发展出现区域不协调的情况。整体表现为,农业机械信息化水平西部地区落后于东部地区,山地丘陵地区落后于平原生产地区;作物种植业的农机信息化水平较高,而畜牧业、渔业、农产品初加工的设施农业信息化程度较低;小马力中低端机具多,大马力高端智能化农机少;单一功能作业技术多,集成配套的机具作业技术较少;小规模自用型农机户较多,大规模专业化服务组织较少。
二是企业和农民对农业机械信息化的认可度还不高。目前中国农民劳作方式主要以家庭为单位,农业生产模式仍以家庭联产承包责任制为主,类似于国外大农场的生产模式仍处于发展阶段,导致目前中国高度自动化、信息化的农业机械设备无用武之地。由于许多农机企业和部分地区农业管理者过度追求眼前效益,对农业机械信息化所带来的长远发展认识不到位,没有认识到中国农机走“智能化、信息化”的发展道路是中国农机发展的未来趋势,忽视了信息技术的应用可以大幅提高传统农机作业效率的巨大优势,种种原因导致价格更高的信息化农机设备目前在我国普及率不高。
三是基础研究与关键技术研究薄弱,农机信息化水平含量低。国内缺乏对农业机械化领域长期系统的研究与技术集成,关键技术与智能机具不足[52],尚未形成完善的以信息技术为基础的全程机械化技术模式和高度智能化的机器配置系统。中国农机长期依靠引进、消化、吸收国外农机技术,导致核心技术匮乏且缺乏基础技术研究和自主创新技术能力。特别是高端机具配套的液压驱动系统、总线及控制系统严重依赖进口,国产高端信息化农机产品可靠性较低,产品故障率高,平均无故障时间均低于发达国家;作业效果难以保障,漏播、漏药、粮食收获损失大;安全环保性能差,产品服务体系不完善等,这些因素导致智能化农机不能实现大面积长期稳定的田间作业。此外,农业信息化专业的技术人员的欠缺、企业创新能力不足也是发展信息技术与农业机械化结合发展的重要阻力,导致中国农业机械与信息化的融合难以短时间内快速推进。
四是农机作业信息系统管理水平不高且缺乏统一标准,各地无法实现数据共享与多地区的联合统一调度。近年来,国内的农机信息化管理与远程调度发展虽然取得了明显进步,但是依然存在管理体制不完善、信息平台建设缺乏统一指导与规划、缺少政府宏观管理等问题[53]。各地区自行建设或引进的信息系统平台各有特色,难以实现数据共享和多地的联合调度,不能大范围应用与推广;智能农机装备与信息管理平台的网络通讯和信息接口标准不统一,没有实现接口、功能和界面的标准化,可移植性和系统兼容性差,导致农机装备与信息系统平台的协同性也较差。
4 中国农业机械与信息技术融合发展方向
4.1 促进智能感知技术发展与导航技术研究
现代农业机械装有大量用来感知作业环境和机具本身作业状态信息的传感器。传感器采集的信息对于机具田间作业的质量极为重要。智能感知信息是智能农业装备精准作业的关键,对于如何提高智能感知技术的精准度、可靠性和实时性问题是亟待解决的难题。
围绕农业精细生产需求,开发基于先进传感器、物联网技术及智能决策等智能感知技术,开展监测土壤温湿度、耕作阻力及有机质含量、作物详细养分信息的高精度检测采集技术研究,同时研发对作物长势、农田病虫草害等的作物信息感知传感器,形成基于农作物生产过程监测的精细生产调控系统;开发基于信息传感控制的耕整深度可调、精准播种、精量施肥与施药的精准耕整地与植保控制体系,提高植保作业的自动化和智能化水平,奠定农机作业与先进农艺技术协调融合的理论基础。
目前农机卫星导航系统的发展相对成熟,可提供全天时、全气候条件下的位置导航信息,但农机作业环境复杂,磁场、极端天气和复杂地形都会造成导航信号不同程度的丢失,所以开发多信息融合的导航系统是提高智能农机不间断作业稳定性的关键。发展集GNSS、惯性导航系统(Inertial Navigation System,INS)和机器视觉导航系统融合的高端导航系统是推进未来无人农机复杂场景作业的重点。
4.2 向农业机械装备智能化方向推进
推进以信息技术为基础的智能化、自动化农机装备的设计制造,实现信息化和智能化农机装备升级,适应现代农业发展对先进适用农业机械的要求,来提高中国现代农业装备有效供给能力和国际竞争力。
一是推进智能化、自动化农机装备的设计制造。全面提升农机信息化设计水平,推行产品模块化设计、知识工程技术为基础的现代数字化设计;建立先进的产品试验检测平台,缩短新产品研发周期,降低企业的研发费用、试制费用和田间测试费用,从而有效提高农机产品的质量;要构建以产品设计、精密制造、面向不同销售对象和服务等环节的现代产业信息平台;采用先进的制造技术和工艺,推行并行工程、虚拟制造、智能制造等先进制造技术,提高加工效率,提高现代智能农机的零部件和整机的精密制造水平。
二是对智能农业装备进行信息化、智能化升级。首先是智能农业动力机械。利用多源信息融合技术、卫星自动导航技术、计算机总线通信技术、人机工程技术等来提高农用拖拉机、大型自走式农业机械的操控性、机动性和人员作业舒适性[54]。开发拖拉机的动力换档和无级变速箱、电子控制分置式液压悬挂、电液提升器与悬浮式转向驱动桥等技术,研制全动力换档、无级变速传动、四轮制动等系列大型拖拉机,为现代农业多样化生产提供绿色高效动力。特别是丘陵地区的农业机械发展要注重机具的地形适应能力,研发具有地面仿形功能的主动悬架,提高机具在山地作业的安全性。其次是智能化田间作业机械,开展现代农业装备参数信息获取与控制智能一体化,包括提升耕整地机械、播种机、施肥机、收获机械等作业机械的智能化。精准农业的智能化田间作业装备能大幅提高化肥和农药的利用率,比如耕整机械装备可以结合土壤信息感知技术,在耕整地阶段进行全方位、多参数地感知土壤信息,建立土壤信息处方图;变量喷雾机能提高农药利用率,减少污染,保护生态环境;智能化施肥机械可以在施肥过程中根据作物密度、土壤肥力等参数控制施肥量,提高肥料利用率。
4.3 构建农机智慧作业系统
现在国内各地区的农机作业信息管理系统复杂多样,无法实现数据共享与多地的联合统一调度。对各地区信息管理平台与智能农机装备的接口进行标准化统一,增强监控终端和操作系统的可移植性,统筹规划建立全国统一的农业机械化作业管理系统。运用“互联网+”平台,围绕农机作业耕、种、管、收等核心环节,通过车载GPS、摄像头和多种作业状态检测传感器,实现多机型、多时段、多地域的远程作业路径跟踪定位,作业视频监控、农机农业生产情况等的实时监测,机车统一指挥调度、机具信息管理、机手管理等。标准化农机作业信息管理系统的大面积推广,使得各地农机部门采用信息化手段快速科学地对农业机具进行调度,有效促进了闲置农机的应用,由此提高农机利用率,降低农业机械化的运营成本。通过农机作业大数据系统,将农机和农艺融合起来形成耕种管收全生态链的信息感知大数据系统,满足现代农业健康、绿色、精准和高效的需求。
此外,推行建立农业机具数据库、农机作业离线数据库和农机政务信息资源库,生成农业装备作业处方图来指导农机装备进行智能化作业,为农业机械化大数据分析利用做好准备。建设农场管理远程咨询系统、农场咨询系统和涉农技术中心网站等能为农民获取信息服务提供重要载体,提高农民技术水平和信息选择能力。
4.4 推进农机自主作业技术研究与无人农场建设
无人农场是新一代信息技术、智能装备技术与先进农艺深度融合的产物,也是未来农场的发展方向。目前搭载卫星导航系统的辅助驾驶农业装备是现代农业装备的主流,随着农业信息化和智能化的发展,开展对无人农机路径规划及导航决策、自主避障、多机协同作业技术的研究是未来无人农机自主作业的关键。
无人农场的关键技术在于智能感知、智能导航与智能决策等方面。农业装备的作业环境是复杂的非结构化环境,农机自主作业对装备的信息感知系统、控制系统、无线通讯系统有更高的要求。设计结合农机自身传感器对作业环境信息进行路径规划的算法,解决导航决策的鲁棒性和抗干扰性,开发多机协同作业任务分配算法,为农机的自主作业奠定技术基础。利用卫星遥感、无人机拍照、车载多功能传感器等技术实现作物土壤探测、农作物长势与病虫害等信息的实时动态监测。依托无人农场智慧管理云平台,通过信息化手段,实现农业机械装备的生产指挥调度和生产要素的全面管理。农业生产和管理的全程无人化,能大大提高劳动生产效率,改善人力劳作的农业模式。
4.5 加强农机信息化技术标准制定与复合型人才培养
为加快信息化技术在农业机械上的应用,建议依托联盟、学/协会等团体和组织,建立对农业智能装备领域常用术语和技术标准、安全标准、服务标准等相关标准体系;对农机装备上的智能监控终端、编写数据接口规范、无线通讯协议等农机装备的共性通用技术标准,优先集中发布实施。
大力建设现代农业综合示范基地,多鼓励国内外大型农机企业入驻,对农机信息化产业链中关键技术的研发给予资金支持,促进行业的快速技术革新。加强对农业机械管理人员的培训和专业技术指导,可以有效地加快农业机械信息化的建设,重点培养适合农业机械化信息建设的专业性人才,从而全面促进农业机械化生产的自动化和智能化水平。
5 总 结
发达国家的农业现代化进程都伴随着农业机械化的快速发展,从农业机械化开始实行到基本实现农业现代化要经历20~30年的时间[47]。目前发达国家的农机产品需求向着成套化、自动化和精准智能化方向发展。
中国农业机械化发展已经呈现出农作物薄弱环节机械化快速推进、农机农艺快速融合、智能装备研发稳步推进及农业机械信息化发展等新的特点,但与发达国家的发展相比,国内农机的技术性、效率性、持续性等方面没有达到现代农业发展的需要,农业机械与信息技术融合不足,总体仍存在一些不平衡、不充分的问题。
中国地形地貌复杂,种植结构多样,农业人口众多,目前的农业发展方向是既要精细化耕作保证粮食安全,又要借助高效农机降低农业成本。信息技术作为现代农业发展的新动力,对转变农业机械化发展方式有重要推动作用。农业机械与信息技术融合是今后中国现代化农业建设和发展的重点[55],中国应不断提高农业机械信息化发展的能力和水平,促进农业机械与信息技术的进一步融合,推进农业机械化和农机装备产业转型升级,将其作为推进农业农村现代化建设的重要内容。通过农业机械与信息技术的高度融合,形成规模化、集约化的生产模式,使信息化成为推动农业机械效益增长的重要手段,推进农业增产、农民增收。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}