



1 引 言
由于果园多分布在山地、丘陵等有一定坡度的地带[3],目前主要应用在果园的除草机具多数为手持式或有人驾驶的半自动化机械,缺乏适用于果园地形的自主导航机器人的研究成果。果园多具有面积广、地形复杂、壕沟多、杂草丛生、土壤湿度较高且土质较为疏松的特点,对AGV的控制器设计以及能量管理等都提出了更高的标准和要求,而通过实体AGV的研发来进行控制系统以及能源管理系统的开发验证所消耗的时间、人力、物力成本都比较大。硬件在环仿真技术可以利用高速运行的实时仿真模型来取代实际被控的部分对象。罗远杰等[4]研发设计了用于现代农业温室对农作物生长环境进行检测的AGV小车并对其控制器在Matlab/ Simulink 环境中进行了仿真验证。本研究以树莓派作为控制器实物,同时建立AGV的仿真模型以进行控制器硬件在环仿真,来测试不同运动控制算法以及能耗管理策略,以减少研发果园AGV控制系统的时间与成本。
目前,AGV的动力能源系统主要有油电混合动力系统、移动供电系统,以及动力电池供电三种[5]。仅有电池供电的AGV小车存在储能有限、续航能力低等问题,在应用中存在较大的限制。混合动力汽车不仅能够实现中长距离移动,而且比传统的燃油汽车更经济的同时也具备了环境友好性。为减少进行油电混合果园AGV实体设计,降低验证和迭代运动控制和能量管理算法的时间、人力、物力成本,本研究针对果园面积广的特点,选择串联式油电混合动力系统进行AGV动力能源系统模型的搭建;针对果园地形复杂、壕沟多等特点,选择履带式行驶模型同时对果园的地形进行建模。最终搭建一个以树莓派作为控制系统实物搭载控制算法,利用Matlab和RecurDyn软件建立了包含能源动力系统、电机驱动系统、履带车行驶部分模型以及路面模型的系统实时仿真模型,实现串联式混合动力AGV控制器硬件在环仿真功能。
2 在环仿真平台的总体设计
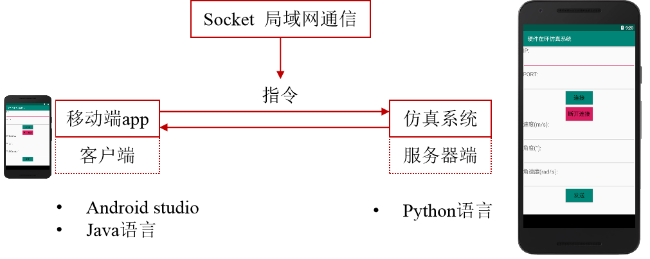
整个硬件在环仿真平台的设计架构如图1 所示,共由四大部分组成,分别是AGV模型、控制器、混合动力系统,以及控制终端,介绍分别如下。
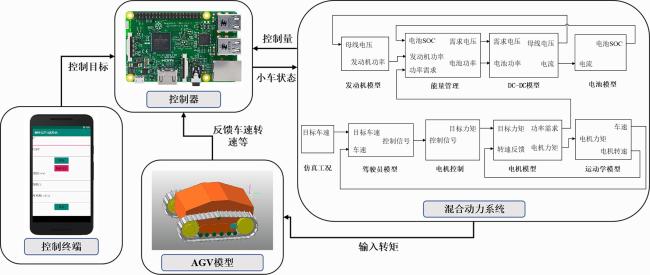
(1)AGV运动模型主要由AGV行驶部分模型和路面模型两部分组成。考虑到大部分果园处于江西、广东以及西北地区,地形主要为丘陵山地,因此,本研究采用了履带车这一更适应于丘陵山地的车辆模型。工业软件RecurDyn中带有track/HM模块,包括主动轮、诱导轮等履带车行驶系统的组件,能够方便、快速地对履带车的行驶部分进行模型搭建并进行动力学分析[6]。因此,使用RecurDyn对车辆的行驶模型进行建模。
(2)控制系统硬件选择安装机器人操作系统(Robot Operating System,ROS)的树莓派3B+,可以搭载所设计的控制系统算法,并同时与人机交互界面和实时仿真模型两者进行通讯。
(3)使用Matlab中的Simulink搭建油电混合系统模型,对各个子模块分别进行建模[7]。驾驶员模型负责小车的控制信号输出。电机控制模型根据控制信号生成对应的目标力矩,进而生成电机力矩,最后达到控制小车速度的目的。同时将功率需求发送给能量管理模型以进行混合动力的能源分配。
(4)考虑到实物研发后的人机交互操作,本研究使用Android Studio开发了安卓app,用来对控制系统进行远程操控。
整个仿真平台的运行首先由安卓app发起,然后通过Socket局域网向ROS发布控制目标,ROS接受控制目标处理之后将控制指令发布到Simulink中的混合动力系统中,动力系统产生转矩发送给RecurDyn中的履带车动力学模型,控制AGV开始运动并向控制系统反馈运动状态。
3 仿真平台关键技术研究
要实现仿真平台的工作以及验证任务,最为关键的技术主要有两部分,分别是运动控制算法和AGV能量模型。
3.1 运动控制算法
在运动控制算法中,主要是履带车的控制策略设计和电机模型的搭建。
3.1.1 控制策略设计
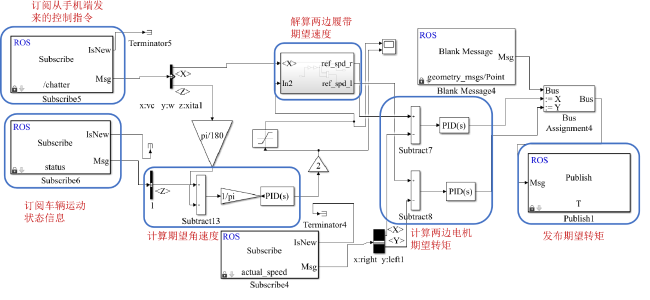
根据履带车运动学分析理论基础,车辆的速度和角速度通过计算可以得到两边履带的速度。因此,制定车辆运动的控制策略,目标是让车辆以设定的速度和角度运动,流程如图2 所示。
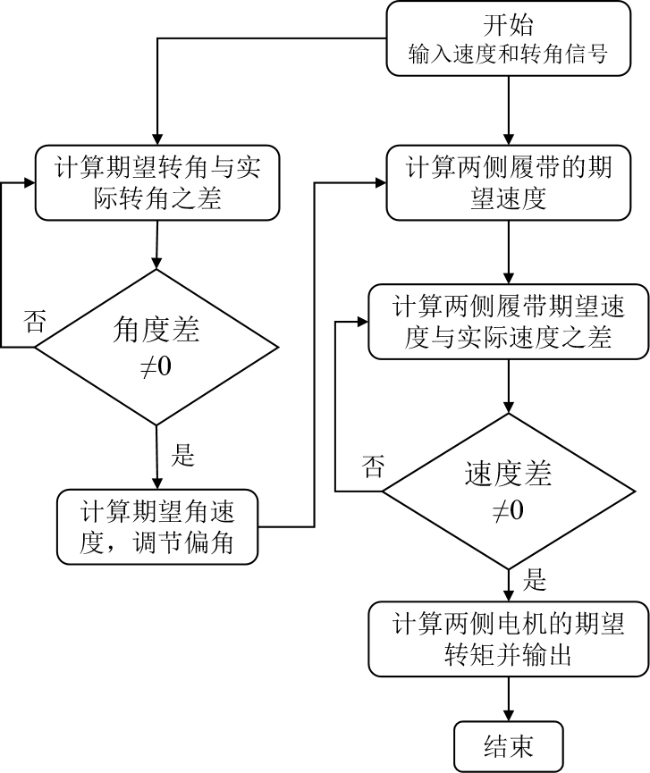
具体工作流程为:
(1)根据输入的期望转角信号,与实际的转角进行对比,若存在偏差,则产生一个期望角速度来调节转角差;若不存在偏差,则期望角速度为零,并继续计算下一时刻的角度差。
(2)根据输入的期望速度和计算得到的期望角速度,计算出两侧履带的期望速度。
(3)计算两侧履带的期望速度与实际速度之差,若速度差不等于零,则产生一个期望的转矩来调节速度;若速度差等于零,则维持当前转矩输出并计算下一时刻的速度差。
3.1.2 电机模型搭建
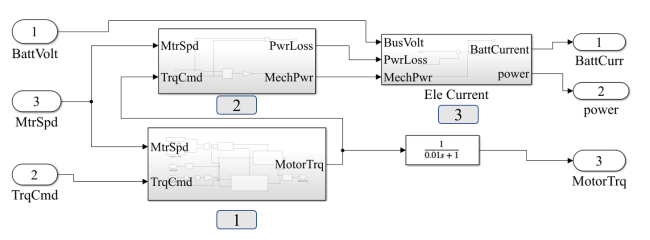
仿真平台电机模型如图3 所示,包括电池电压(BaltVolt)、电机转速(MtrSpd)和电机需求力矩(TmqCmd)三个输入指标,以及电机电流(BattCurr)、需求功率(power)和电机输出力矩(MtrTrq)三个输出指标。由三个部分组成,第1部分是对电机工作区域的判断,具体框图内容如图4 所示,第2、第3部分则是计算带电机电流以及需求功率。
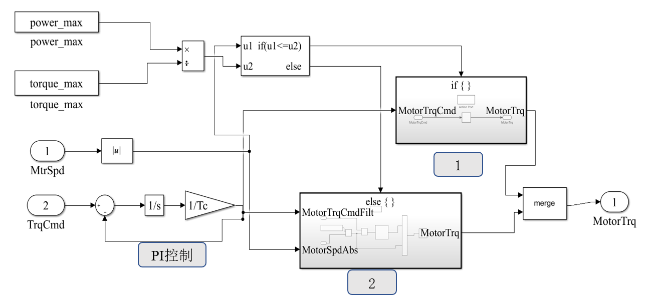
在图4 中,第一步就是判断当前车辆处于恒扭矩区还是在恒功率区,通过比例积分( Proportional-Integral,PI)控制调节请求力矩。电动汽车较为理想的驱动模式是将工作区分为恒转矩区和恒功率区[8],并通过额定转速进行区分。如果电机转速在额定转速之下,就是工作在恒转矩区,即进入图4 中1部分,通过电压来调节转速;如果转速在额定转速之上,就是工作在额定功率区,进入图4 中2部分,通过电流来调节转速。
3.2 AGV能量模型
对于油电混合AGV而言,其动力来源分别为电池和发动机,在仿真过程中如何根据AGV的运行工况来确定电池和发动机各自的功率输出是非常重要的,而要确定动力的分配,首先需要对这两者进行建模。
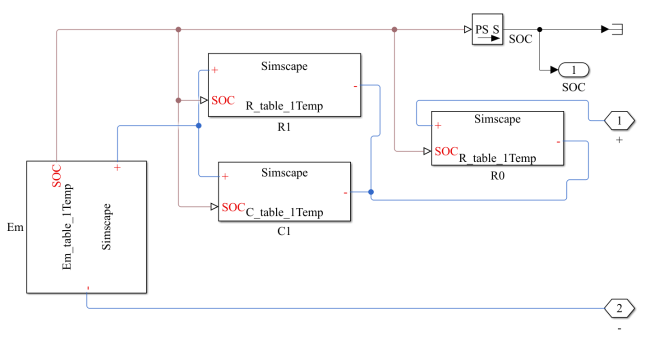
3.2.1 锂电池模型搭建
3.2.2 发动机特性描述
在本研究中,混合动力系统采用汽油机发电机组和动力电池组的组合。在设计能量管理策略时,发动机的特性表达对能量转换的模型至关重要,因此需要进行发动机模型的建模,即发动机特性的研究。考虑到发动机特性问题的复杂性,难以建立高精度的发动机模型,同时在能量管理策略问题中可以将次要因素忽略,重点考察功率、油耗等因素。因此,本研究的发动机模型通过拟合发动机特性曲线的方式建立,主要关注对象为发动机转速-功率曲线以及发动机转速-油耗率曲线。由于发动机功率特性曲线的获得渠道较少,因此,在查阅文献后选取了额定功率为3.75 kW的小型汽油机,其拟合后的特性曲线如图6 所示[14]。
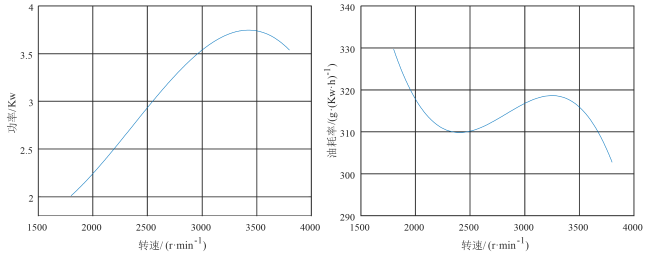
经拟合后的两条发动机特性曲线方程分别如下[14]。
其中,P为发动机输出功率,kW;n为发动机转速,r/min。
其中, 为发动机油耗率, ;n为发动机转速,r/min。
根据图6 中两条曲线,通过需求功率可以确定发动机的转速,之后利用转速则可以确定发动机的油耗率,计算油耗量。
4 仿真平台实现
为实现整个仿真平台的搭建,还需要对履带车的行驶模型以及路面进行建模,同时在Android平台上进行智能操作终端搭建,之后再进行整个系统的串联组合。
4.1 履带车的建模
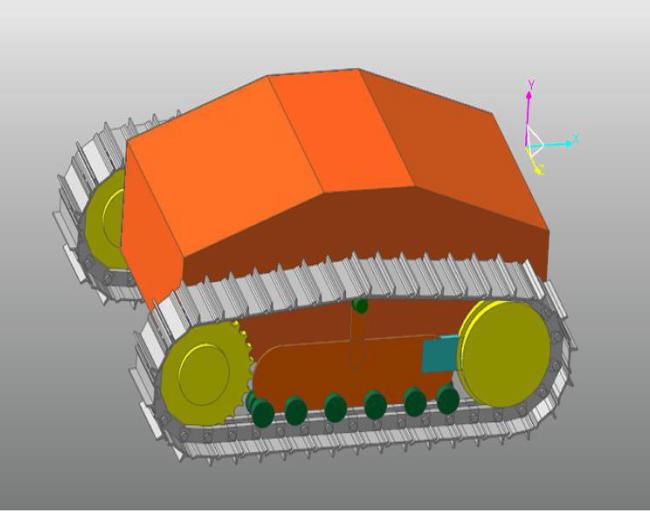
为验证运动控制算法的有效性,基于RecurDyn软件的track模块建立了履带车的行驶模型共分为轮组、履带板、履带框架以及车身四个部分,如图7 所示。考虑到果园地形凹凸不平处较多,因此设定履带着地长L为0.5 m以保证AGV行驶平稳,每侧履带系统由38块履带板、6个负重轮、一个链轮、一个惰轮、一个拖轮组成,履带板宽度W为0.138 m,所有材料均采用钢材料。考虑到整车的实际重量,对车身进行增重使得履带系统和车身总重量大概为200 kg。
4.2 基于谐波叠加法的路面模型搭建
在AGV的实际户外运动中,遇到的路面通常为凹凸不平、起伏较大或者坡度较高的路面,因此在仿真中需要进行一定还原度的路面建模以提高算法验证的精度与可靠性。目前常用的理论方法主要有谐波叠加法(三角级数法)、积分单位白噪声法、滤波器整形白噪声法以及自回归(Autoregressive,AR)模型、自回归滑动平均(Autoregressive Moving Average,ARMA)模型等方法[15]。积分单位白噪声法虽然十分简单,但其所得结果一般误差较大;滤波器整形白噪声法简单易行,不过其只能拟合特定的路面谱结构[15]。ARMA模型等方法是根据功率谱密度建立时域模型,之后利用傅里叶变换以及Yule-walker公式得到模型参数,实现方法比较复杂[16];谐波叠加法虽然计算量较大,但其简单直观、数学基础严密,能较好地模拟各种类型路面以及非等级公路[17]。
本研究采用谐波叠加法构建模型,它的原理基础主要是将路面不平度表示成大量具有随机相位的正弦或余弦之和,是一种利用离散化数值模拟路面的方法。根据“机械振动道路路面谱测量数据报告(GB/T 7031-2005)”[18],随机路面功率谱密度 的拟合表达式为:
其中, 为路面不平度系数; 为参考空间频率,取 ; 为频率指数,一般情况下取w=2。
空间频率n选取 之间时,将区间 划分成多个小区间,在每个小区间中用其中心频率处的功率谱密度来代替这一小区间的功率谱密度,其标准差可以得到对应第i个小区间的正弦信号: ,其中, , 为对应小区间的不平度频率; 为在[0, ]满足均匀分布的随机数, 为小区间的频率间隔。
根据谱密度可以计算出每个采样点的路面垂直位移,计算公式如下。
其中, )即为随机路面的位移输入。
现有标准的路面不平度等级划分,总共有A—H8个级别[19],从A到F路面不平度越来越高。
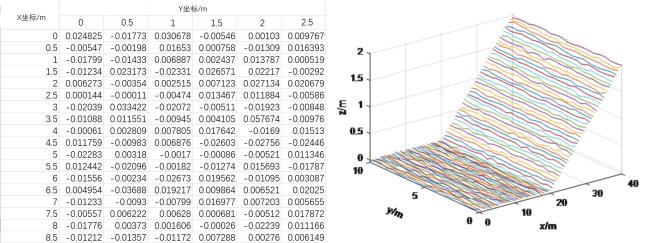
在Matlab路面建模中,取n 1= 0.63 m-1,n 2=4.2 m-1,路面不平度系数Gq(n0) =16,384×10-6 m3。
F级路面通常指窄路、需要查看才能通过的泥潭、坡度25°以下的碎石路面,结合果园的实际坡度和地形情况,建模过程中选择了路面等级为F的路面,建立了包含平面以及45°坡情况的路面模型如图8 所示。左侧路面垂直位移为正则代表此处高于水平面高度,为负则代表低于水平面高度,单位为m。可以看到路面垂直位移起伏程度较大,模拟结果较好。
4.3 人机交互设计
针对仿真平台的人机交互工作主要是向仿真系统发送仿真所需的速度、角度和角速度,设计方案和人机交互界面如图9 所示。手机作为客户端,服务器端部署在仿真平台上,采用Socket通信方式在局域网中进行通信。
4.4 混合动力系统建立
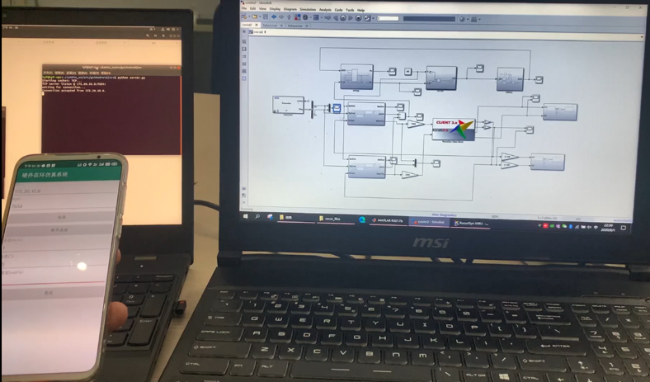
整个混合动力的联合仿真基于Simulink与RecurDyn软件,将履带车模型以动力学模块的形式导入Simulink,仿真时通过输入输出参数进行交互。联合仿真系统框如图11 所示。
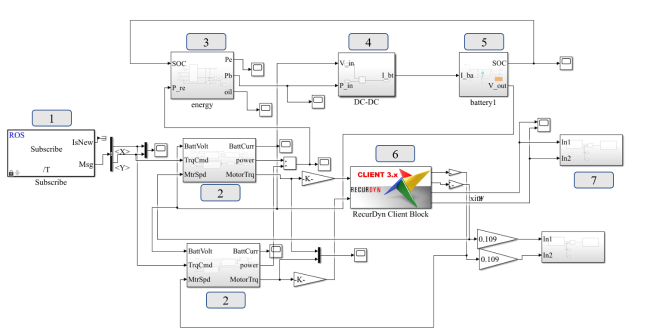
在Simulink中搭建的油电混合动力系统整体模型包含7大模块,分别为系统参数输入模块、电机模块、能量管理模块、DC-DC转换模块、电池模块、履带车辆动力学模块以及系统参数输出模块。各模块工作原理介绍如下。
(1)系统参数输入模块为ROS订阅模块,订阅树莓派控制端发布的履带车期望转矩参数;
(2)电机模块根据接收到的期望转矩判断电机当前状态处于恒转速区还是恒功率区,恒转速区根据电机特性曲线计算扭矩[20]再计算电机需求功率;
(3)能量管理模块通过当前的需求功率,经过瞬时优化的管理策略求得每一时刻的最优功率分配并输出发动机功率、电池功率以及油耗;
(4)DC-DC转换模块根据当前的功率分配进行母线电压的调配,并输出当前的电池电流状态;
(5)电池模型根据每一时刻的电流状态计算得到当前的电池SOC状态以及电池总压与端压状态;
(6)履带车辆动力学模块输入两侧主动轮的扭矩,经过动力学模型的实时解算得到小车的状态信息,并输出当前的车速、车辆朝向角以及车辆转速。
系统参数输出模块为ROS发布模块,将系统的状态信息通过ROS发布至树莓派控制端从而实现控制闭环。
5 试验方案及结果分析
仿真平台搭建完成之后,本研究对控制算法以及能量管理策略进行了设计、验证以及优化,并进行结果比较分析。
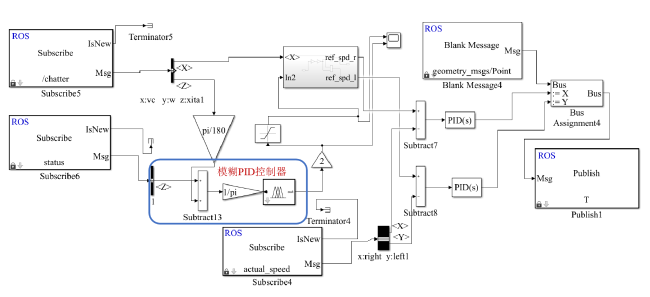
5.1 控制算法的设计和验证
根据3.1节设计好的控制算法,在Matlab中设计了如图12 所示的Simulink框图,在无PID、串级PID以及模糊PID控制器下对AGV的前进以及转向工况进行了仿真测试。
5.1.1 直线行驶和上坡工况仿真
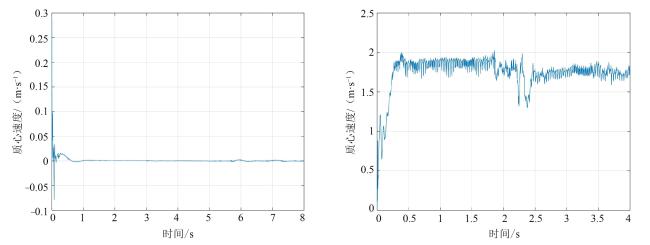
可以看到,刚开始时,由于小车和路面分别建模的原因,小车与地面未充分接触,所以小车车轮的速度会突然增大;随后车辆在重力的作用下与地面充分接触,车轮速度减小。
无PID控制器时,小车质心速度在设定速度为2 m/s的情况下并没有得到很好的控制(图13 (a)),这是由于设定速度与实际速度偏差值太小导致输出力矩太小,因此在PID控制器设计中需要增大比例环节的控制参数。
针对PID控制器,本研究优化了参数以后结果如图13 (b)所示,在平地上运动时,小车约在0.4 s时达到稳态速度,其实际速度可达到1.9 m/s左右,存在一定的误差(5%);在2.3 s时,开始上坡,车速度明显下降,但随后在0.2 s后又恢复上升,这是由于转矩增大的缘故。另外,从图13 (b)中可以看出小车的速度在抖动,这是由于履带的振动和土壤地面崎岖不平的颠簸导致的。这个结果表明车辆和路面的建模十分符合实际情况。
综上所述,当前采用的PID控制器对车辆行驶速度的控制可以达到所需要的控制效果。
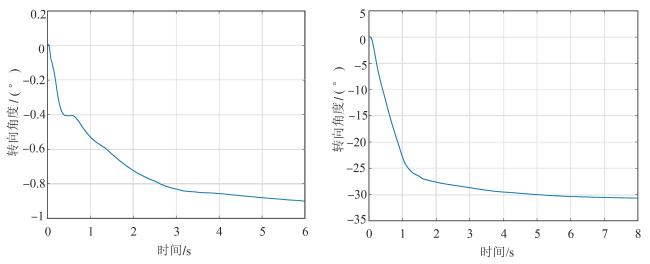
5.1.2 转向工况仿真
设定转向角度为30°,无PID控制器与PID控制器的仿真结果如图14 所示,可以看到与直线行驶结果类似,无PID控制器时角度控制响应速度非常慢,而在PID控制器作用下,小车角度在5 s左右达到设定值,并且经过参数调整后未出现振荡现象。
为了改进控制效果,更好地控制车辆转弯时的表现,将上述PID控制器中的角度环控制器改为模糊逻辑控制器[22],其控制框图如图15 所示。
模糊控制器输入变量是当前的角度偏差,输出变量是期望的角速度。输入输出的隶属度函数如图16 所示。
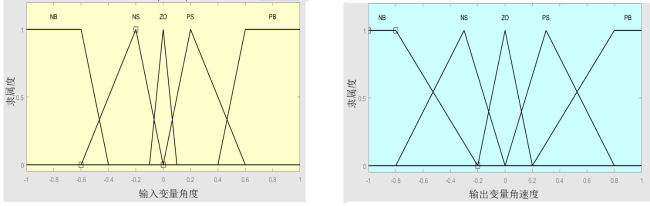
小车角度控制的逻辑为:当角度偏差较大时,产生一个方向相反的期望角速度来纠正角度的偏差。模糊规则描述如下。
规则一:如果角度偏差为负大,那么期望角速度为正大。
规则二:如果角度偏差为负小,那么期望角速度为正小。
规则三:如果角度偏差为零,那么期望角速度为零。
规则四:如果角度偏差为正小,那么期望角速度为负小。
规则五:如果角度偏差为正大,那么期望角速度为负大。
据此可以列出以下用于小车角度控制的模糊规则表,见表1 。
表1 角度控制模糊规则表Table 1 Fuzzy rules of angle control |
| 模糊控制规则 | 规则一 | 规则二 | 规则三 | 规则四 | 规则五 |
|---|---|---|---|---|---|
| 角度偏差 | NB | NS | ZO | PS | PB |
| 期望角速度 | PB | PS | ZO | NS | NB |
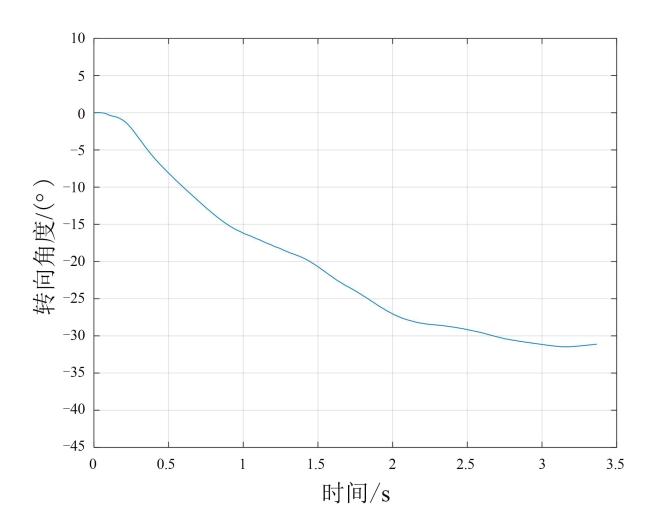
设定好模糊规则之后,对小车转向30°工况进行仿真。
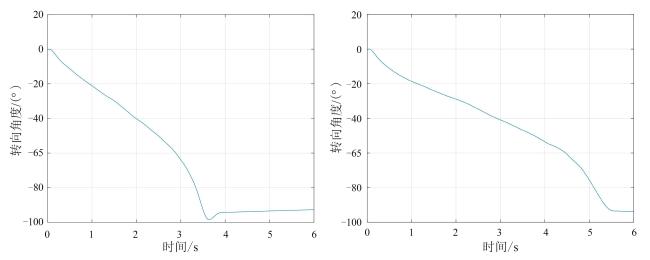
结果如图17 所示,可以看到在2.5 s时即达到了设定值,相比串级PID控制器响应速度提高了50%。为了验证模糊控制器的优化结果,本研究对转向角度为90°的工况进行了仿真,结果如图18 所示,可以看到,当设定角度较大时,串级PID控制器在4 s时达到设定速度,相比模糊控制快了约20%,但其在控制过程中会产生超调(约10%),转向角度会达到100°左右,这在控制过程中是不宜出现的;而模糊控制器在5.5 s时达到设定速度,整个过程更加平稳,同时并没有产生超调。可以看出模糊控制器比进行了参数优化的串级PID控制器在更大的角度控制范围内性能更加良好。
5.2 能量管理策略测试与对比
针对能量管理策略,本研究对基于确定规则和基于瞬时优化这两种策略进行了仿真测试。
基于确定规则的能量管理策略是通过依据工程经验所制定的确定规则进行发动机和电池间的功率分配[23],具有简单易懂、计算量小、方法易于实现等优点,但是无法适应不同工况变化和实际的动态变化的需求,适应性不强,无法实现最优控制。在本研究中,确定规则可以描述为三种驱动模式,分别为纯电驱动模式、发动机单独工作模式以及双动力源驱动模式。
基于瞬时优化的能量管理策略将优化目标定位最小的瞬时油耗[24],即油耗率;在满足电池电量、发动机功率限制、电池充放电功率限制等约束的条件下,找到最低的油耗率,从而使系统具有更高的效率。
针对电池初始SOC为0.48时、履带车正常工作120 min的工作场景进行能耗分析。在此条件下,两种策略下电池SOC变化与油耗曲线如图19 所示。可以看到,基于瞬时优化的电池SOC状态变化更为平稳,这是因为在系统的瞬时优化策略中,每一时刻的发动机输出功率收到电池充电功率以及整体效率的约束,因此提供给电池充电的功率有限。这样的优化策略能够有效避免充电过快对电池造成的损伤。基于瞬时优化的能量管理策略针对每一时刻的等效油耗进行优化,在最终的油耗结果上成功起到了优化的作用;在系统工作120 min的条件下,优化后的发动机油耗相比基于规则的发动机的油耗从2.1 kg下降到了1.83 kg,优化效果达到了13.04%。
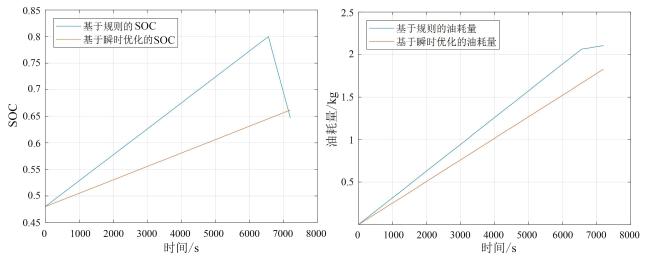
基于确定规则下,图19 (a)中有两个关键点,分别为SOC=0.48以及SOC=0.8。在仿真系统开始工作时,电池的初始SOC为0.48,小于电池的最小放电状态,因此混合动力系统根据规则进入发动机单独工作状态。在此过程中,发动机根据需求功率的大小调整工作点,若发动机的输出功率大于需求功率,则多余的功率将提供给电池进行充电;从右侧曲线中可以看到,发动机的油耗在发动机单独工作模式下消耗较快,其中一部分油耗用于给电池充电;在混合动力共同驱动模式下,汽油的消耗速度明显下降。
基于瞬时优化策略下,电池初始状态的电量过低,受到电池SOC状态的约束,系统会提供一部分能量用于电池充电;同时充电的功率收到电池充放电约束,因此电池的充电速度比起基于规则的能量管理策略更低(图19 (a))。系统根据发动机瞬时油耗得到全局的总油耗量。
基于确定规则策略下系统工作过程的发动机与电池输出功率曲线如图20 所示,其中Pe为发动机输出功率,Pb为电池输出功率。若发动机的输出功率小于需求功率,则为双动力共同供电模式;在电池的SOC充电并到达0.8的状态时,混合动力系统根据规则进入混合驱动模式,电池不再继续充电。考虑到仿真时长较长,数据较多,因此在功率图中只表达了发动机与电池供电模式改变的部分。
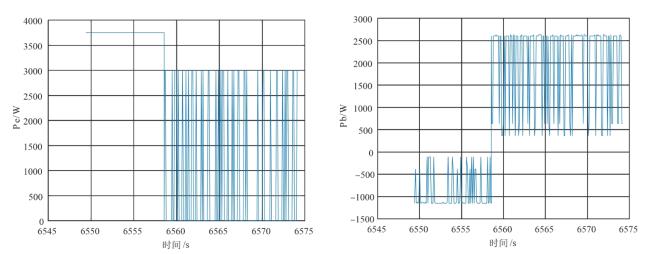
发动机在6559 s前都保持3.75 kW的额定功率输出。这是因为基于确定规则的能量管理策略在发动机单独工作同时为电池充电时,通过电池的充电来调节其工作点从而使发动机保持额定功率。当系统进入双动力源共同供电后,发动机的输出功率会根据需求在最大工作功率、最小工作功率中切换,在某些时刻则会关停发动机,由电池单独供电。
电池在6559 s前输出功率均为负值,这是因为在系统中定义电池充电时功率与电流为负值,放电时功率与电流为正值。当电池在充电状态时,发动机多余的输出功率将转换为电池的电量;当电池电量充足时,电池会补足发动机工作时不够的功率。
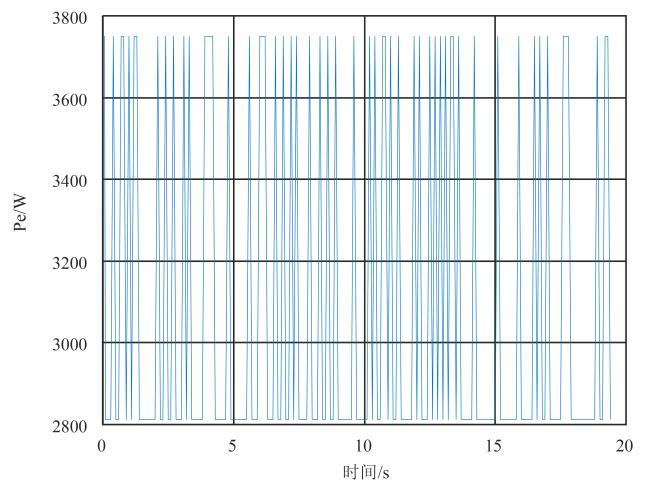
基于瞬时最优策略下的发动机输出功率曲线如图21 所示。整个过程发动机功率在3.75 kW以及2.81 kW之间变化,取前20 s系统工作过程的发动机输出功率曲线如图21 所示。从曲线中可以看到,发动机根据当前电池状态的约束结合特性曲线给出了当前的最优输出功率,在该功率下,系统的瞬时等效油耗可以更低。
6 结论与展望
本研究针对建立在丘陵山地等地形处的果园地形复杂、面积范围广、壕沟多等特点模拟建立了其地面模型的同时从混合动力设计出发,搭建了一套用于果园AGV的运动控制与能量管理仿真平台。从硬件在环仿真平台对控制算法的验证与优化以及基于确定规则和瞬时优化的能量管理策略的仿真测试结果可以看出。
(1)模糊控制器与串级PID控制器相比较,当转向角度较小时,模糊控制器的响应速度提高了约50%,当转向角度较大时,串级PID虽然响应速度快了约20%,但也因此有了超调(10%),模糊控制器能够更加平稳且无超调到达设定值,自适应性更加强。
(2)在基于瞬时优化的能量管理策略控制下,发动机油耗相比基于规则的发动机的油耗从2.1 kg下降到了1.83 kg,优化效果达到了13.04%。
平台对于在复杂地形下的串联式油电混合动力AGV的控制系统算法具有稳定性,能耗等的验证比较成功。这对于之后指导研发和设计应用在果园中的AGV具有较为重大的意义,填补目前在果园AGV研究上的空白,无论是对果园除草机器人还是采摘机器人等的设计都可以提供其移动平台的控制算法仿真验证。利用硬件在环仿真技术将实物控制器与虚拟模型结合不仅可以加快验证迭代控制算法,同时也可以验证硬件平台是否满足设计要求,极大地减少在控制设计上的时间。
另外,目前大部分投入使用的AGV的动力来源基本为电池,但由于农业特殊的作业环境和作业要求,对于稳定且持久的动力要求更高。本研究搭建的串联式混合动力模型可以为之后需求越来越高的农业用AGV设计生产提供参考,该模型可以在不造成燃油浪费与污染的情况下模拟运行工况与能耗。当然其不仅仅只能用于履带式AGV模型,通过对不同型号的发动机、电池模型以及不同类型的AGV如轮式、足式建立对应的运动模型即可针对不同类型AGV进行算法仿真与验证,对于指导其他场景如室内或者温室等AGV的控制也具有一定意义。
有所不足的是,本研究只是针对AGV设计中的运动控制与能量管理两个环节进行了模型搭建与仿真,还没有涉及到AGV的感知层与决策层的算法设计与仿真,而这两部分对于AGV而言是较为重要的两部分。之后将针对这两部分进行研究,通过对果园场景模型的搭建,赋予AGV模型激光雷达和视觉传感器等实现地图建模并进行路径规划,再结合现有的运动控制与能耗算法可以建立包含感知、决策以及控制一体化的AGV仿真平台,为果园AGV的设计研发提供更加成熟的方案,减少实体开发验证的时间,降低研发成本,促进果园AGV的快速发展。






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}