



1 引 言
农学领域一般采用标尺人工测量植株高度(简称“测高”),其测量方式包括自然株高法、生理株高法和叶枕株高法3种[6]。最常见的是通过测量地面到自然状态下主茎顶部的垂直距离作为作物自然株高。由于环境、基因型或者管理等因素影响,作物之间生长形态会有较大差异。例如小麦等直立株型作物,上部叶片会出现下披现象[7],为此会将作物叶片展开或者挑选直立生长的植株测量其基部至顶部的垂直距离作为生理株高。表示地面至植株最上部叶枕距离的叶枕株高也是使用较多的高度测量方式。然而,人工测高方式需要大量实地调查,效率低并且数据精度易受主观因素影响,通过抽样方式获取的株高数据无法代表大田的全部状况。遥感技术的发展为作物测高研究和应用提供了一种新的解决思路,本文旨在对基于遥感手段的作物株高提取研究进行全面综述,从不同传感器类型和平台出发,总结作物株高获取方法及其不足,归纳株高在作物表型特征提取、倒伏监测、产量估测和育种等方面的研究应用现状,并对近地遥感技术在作物株高获取方面的发展趋势和未来挑战进行展望。
2 全球遥感技术测高研究态势
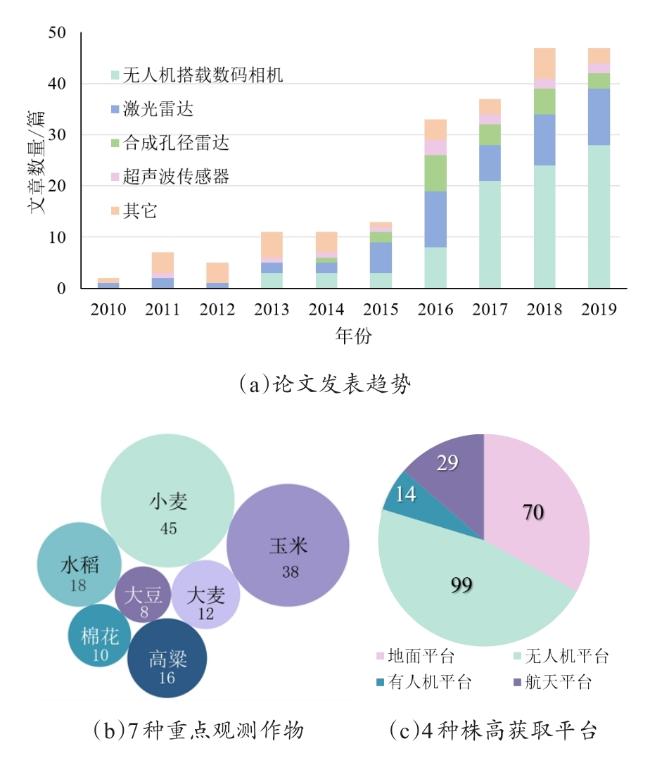
为了解遥感技术测高领域的研究进展,总结现有研究所使用的主流传感器、平台和重点观测对象,在“Web of Science”和“ScienceDirect”平台搜索引擎检索近10年(2010—2019年)全球发表的有关遥感技术测高的学术论文,检索标题关键词规则为:"canopy or crop or plant or vegetation or wheat or maize or corn or rice or barley or soybean or sorghum or rapeseed" and "height or lodging or biomass or yield or lai",结果如图1 所示。图1(a) 统计了遥感测高中使用频率最高的无人机(Unmanned Arial Vehicle,UAV)平台搭载可见光相机、激光雷达(Light Detection and Ranging,LiDAR)、合成孔径雷达和超声波传感器4种主要方法及其他方法的文章数量,其整体上呈现增加的趋势。其中,由于低空遥感技术及计算机视觉方法的高速发展,无人机平台搭载可见光相机成为最常用的作物株高获取手段,其次为激光雷达方法。图1(b) 显示,作物测高论文多数以小麦、玉米、水稻等大宗粮食作物为研究对象。并且,作物测高以地面及无人机等近地遥感平台为主(图1(c) ),近地观测方式更适用于具有低矮、种植密集结构特征的作物。
3 近地遥感技术测高的研究进展
按传感器工作方式的不同可将近地遥感测高技术分为主动式遥感和被动式遥感两种。主动式遥感的传感器带有能发射电磁波、声波等讯号的辐射源,同时能够接收并记录目标物反射回来的讯号,因此受光照条件影响小,可以昼夜工作;被动式遥感则是利用传感器直接接收并记录目标物反射自然辐射源的电磁波或自身发出的电磁波而进行探测。该类传感器通常成本较低,但更易受到光照条件影响,且不具有穿透性。
3.1 主动式遥感测高及特点
激光雷达通过记录激光飞行时间(Time of Flight,ToF)能够准确地定位激光束接触到物体的光斑。由于其较强的穿透能力,通过脉冲的多次回波反射通常可以同时记录被测物体冠层和土壤的点云信息,通过分类和滤波处理后可以得到物体高度信息。在20世纪90年代,搭载于直升机或固定翼飞机的激光雷达系统发展迅速,广泛应用于精准林业的测量,如林冠高度、林分平均树高、地上生物量等[8,9]。然而,航空激光雷达的飞行高度通常在百米至千米级,其较低的测距精度难以实现土壤与低矮作物的区分[10,11]。此外,数据采集成本及处理复杂性增加了基于激光雷达的多时相作物株高监测的难度[12]。地基激光雷达系统能够获取毫米级精度的三维点云数据,更适合于作物的株高提取。其地基平台主要包括地面固定平台[13-15]、机器人平台[16]和车载平台[17,18]等。在玉米[19]、小麦[20,21]、水稻[22,23]以及高粱[24]等多种作物中均取得了高精度的作物株高估算结果。但是,地面固定平台存在数据采集效率低、遮挡严重等问题,而地面移动平台易受不同大田作物行距、株距以及作物高度等因素的限制,同时直接田间行驶也容易造成土壤压实[25]。随着激光雷达的轻小型化发展,其搭载于无人机上成为可能,在提高作物观测频次和效率的同时,可以减少数据获取时对作物造成的干扰,填补了数据精度高但效率低的地基激光雷达系统与能够进行大面积数据采集但细节信息较少的有人机激光雷达系统之间的空白[26]。
3.2 被动式遥感测高及特点
与深度相机相比,可见光相机能够获取更高分辨率的图像[37]。有研究在被测作物周边放置已知高度的参考物,通过采集同时包含参考物和作物的单幅可见光图像,计算作物高度[38,39]。随着计算机视觉技术的发展,出现了通过在地面平台布设多个可见光相机或者移动单相机来产生多视角图像,并基于双目立体匹配[40]、多视图立体视觉[41,42]等方法的作物测高方式,但其效率较低、测量范围较小。近十年来,无人机搭载高分辨率可见光相机因其成本低、分辨率高且易于部署等优点已成为近地遥感技术中最广泛使用的作物株高获取方法[43-46]。通过可见光相机采集重叠的图像,基于运动恢复结构(Structure from Motion,SfM)对重叠图像进行特征检测与匹配[47]。特征匹配构建稀疏点云后基于多视图立体视觉法进行密集点云重构,最后通过点云插值生成表示作物或土壤高程的影像。目前,该技术已应用于玉米[48-51]、水稻[52]、高粱[53,54]、小麦[5,46,55]、大豆[56]、棉花[57,58]等作物,其精度与地面实测数据相比,多数作物的决定系数R 2可控制在0.80以上,均方根误差(Root Mean Square Error,RMSE)在10 cm以下。
总之,激光雷达、超声波、深度相机和可见光相机均能够在地面平台上获取较好的大田作物高度估算精度。但是,地面平台的行进效率和灵活性在一定程度上限制了其应用范围。无人机平台能够较好弥补上述不足。目前,无人机结合可见光相机在作物测高研究中已得到广泛应用,而随着激光雷达的不断轻小型化,让无人机搭载模式成为可能,该模式也逐步在作物测高领域得到应用。
3.3 近地遥感测高流程与关键技术
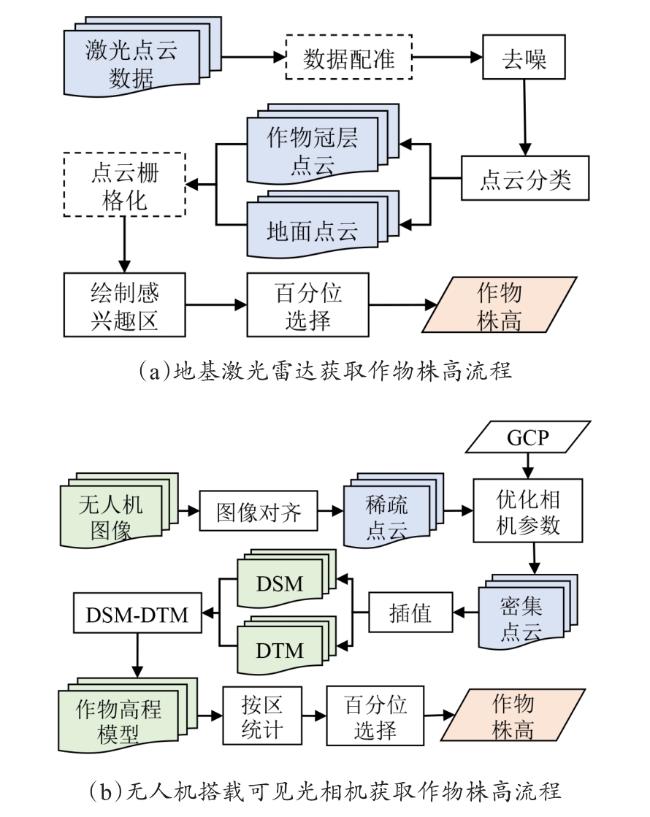
本节以地基激光雷达和无人机搭载可见光相机两种作物测高主流方法为例,介绍株高获取的主要流程(图2 )和涉及的关键技术。
3.3.1 地基激光雷达测高方法
为避免地基测高平台受到遮挡影响,一般会从不同高度和角度设置多个数据采集站点。因此,在地基激光雷达株高提取前需要利用最邻近点迭代算法(Iterative Closest Point,ICP)[59,60]或者加入外置特征地物(如标靶球)[13,14]等方式实现多站点数据的配准。对点云数据进行配准和去噪等预处理步骤后,准确地提取作物顶部及土壤区域是实现精确测高关键步骤之一[61]。程曼等[62]利用多项式曲线针对花生冠层轮廓特征使用激光点云进行拟合,结果显示5阶曲线拟合效果最佳,通过计算拟合曲线极大值点和极小值点以判断作物冠层轮廓的边界,得到花生株高,如图3 所示。多项式曲线拟合方法适合冠层均匀的圆形叶片,对于不均匀的尖顶作物,容易造成低估且产生过高的拟合阶数。苏伟等[19]将单株玉米点云数据从群体点云中分离后,遍历单株玉米点云获得其空间坐标与点距,株高即为点云高度坐标的最大值和最小值两点间的欧式距离。此外,在播种后即进行土壤基面的点云数据获取也能够有效地减轻植株遮挡对土壤点提取产生的影响。通过在激光雷达测高系统上搭载可见光相机,获取每个测量点空间坐标的同时,能够记录被测物体的颜色和纹理信息,所产生的着色点云数据有助于作物与土壤的分类,也能够实现土壤和作物冠层点的精确提取。

3.3.2 无人机搭载可见光相机测高方法
被动式遥感传感器无法穿透植被冠层获取土壤基底,在作物还未封行的生长初期或作物种植间隔本身较大的情况下,可以提取土壤区域,并通过克里金插值[63,64]、反距离权重插值[53,65]、自然邻域插值[45]等方法获得完整、准确的数字地形模型(Digital Terrain Model,DTM)(图4 )。该方式可以同步获取DTM和作物表面高程(Digital Surface Model,DSM),减少成本的同时避免人为因素或恶劣天气造成的土壤高程变化。然而,农业生产中往往以较高的播种密度种植经济作物,使作物迅速封闭冠层,抑制杂草生长[66,67],增加了从DSM中推导DTM的难度。因此对于种植密集、冠层均匀或者基底起伏较大的垄作型作物,如高粱、油菜、马铃薯、甜菜等,多数实验选择在作物出苗前或收获后进行额外一次的飞行任务获取DTM[5,18,68,69]。

基于SfM算法的作物株高提取方法中需要精确地检测及匹配图像中大量特征信息,以获取高质量的冠层重建[70]。该过程通常采用尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)算法寻找同名像点。然而与建筑物、树林等地物相比,农田作物存在大量的自遮挡现象且纹理信息单一,在多个视图中难以实现叶片目标的精准匹配,从而增大特征匹配误差,造成细节形态和纹理信息的缺失。对于郁闭度较高的农田目标,通常可以设置较高的无人机图像采集重叠度,以及更高的飞行高度来应对上述问题。Hasheminasab等[71]使用高精度全球定位系统/惯性传感单元(GPS/IMU)以减少特征匹配的搜索空间,代替传统的穷举搜索,能够减轻由重复纹理引起的匹配模糊问题。此外,无人机飞行高度较低时而产生的气流或者多风的环境条件均会使冠层发生移动,导致不同图像中叶片、穗部等结构的位置改变,也会对特征匹配产生一定的不利影响[72]。
4 近地遥感技术测高在农业中的应用
作物株高由于能够通过遥感方式无损、高精度地直接测量,因此常被作为模型变量应用于作物生理生化指标反演、倒伏识别、产量预测和育种等方面(表1 )。
表1 基于近场遥感方式获取大田作物株高的应用研究Table 1 Application of near-field remote sensing method to obtain plant height of field crops |
| 应用 | 传感器 | 平台/测量高度 | 作物 | 模型 | RMSE | R 2 |
|---|---|---|---|---|---|---|
| 生物量估算 | 激光雷达[73] | 地面固定平台 | 小麦 | 幂函数回归模型 | 1.76 t/ha | 0.82 |
| 超声波[74] | 地面固定平台 | 生菜 | 指数回归模型 | —— | 0.80 | |
| 可见光相机[75] | 无人机/50 m | 小麦 | 偏最小二乘回归模型 | 0.96 t/ha | 0.74 | |
| 可见光相机[76] | 无人机/25 m | 水稻 | 随机森林 | 2.10 t/ha | 0.90 | |
| 可见光相机[77] | 无人机/44 m | 洋葱 | 作物体积模型 | 1.53 t/ha | 0.95 | |
| 倒伏监测 | 激光雷达[78] | 无人机/15 m | 玉米 | 通过株高变化定量测定倒伏程度,株高测量精度R 2=0.964,RMSE=0.127 m | ||
| 可见光相机[79] | 无人机/20~50 m | 玉米 | 通过设定阈值量化作物倒伏率,与地面实测值相比R 2=0.50,RMSE=0.09 | |||
| 可见光相机[80] | 无人机/35 m | 大麦 | 通过设定阈值量化作物倒伏率,与地面实测值相比,其最佳精度R 2=0.96,RMSE=0.08 | |||
| 产量预测 | 可见光相机[81] | 无人机/50 m | 玉米 | 多元回归模型 | 0.13 t/ha | 0.74 |
| 可见光相机[82] | 无人机/50 m | 甘蔗 | 作物模型 | 1.09 t/ha | 0.44 | |
| 可见光相机[83] | 无人机/50 m | 棉花 | 多元回归模型 | 0.16 t/ha | 0.94 | |
| 可见光相机[84] | 无人机/30 m | 大豆 | 偏最小二乘回归模型 | 0.42 t/ha | 0.81 | |
| 高光谱相机[63] | 无人机/50 m | 小麦 | 偏最小二乘回归模型 | 0.65 t/ha | 0.77 | |
| 辅助育种 | 可见光相机[85] | 无人机/30 m | 小麦 | 对株高性状进行全基因组和QTL标记,其预测的基因组值与实际值相关性在0.47~0.53之间 | ||
| 可见光相机[86] | 无人机/40~60 m | 玉米 | 通过对7个与株高相关的性状进行全基因组关联研究,共鉴定出68个QTL,其中35%的QTL与已被报道的控制株高性状的QTL重合 | |||
(2)倒伏监测。倒伏是指作物直立部位发生永久位移[96],作物的抗倒伏能力是重要的遗传特性以及育种重要的选择标准[97],通常可以通过提取光谱特征、纹理信息或倒伏前后株高变化测定倒伏面积和倒伏程度[98,99]。Singh等[96]将小麦倒伏前的一期DSM减去倒伏后的DSM得到差分DSM,并提取差分DSM中各个小区高程的均值,与人工打分得到的倒伏发生率、倒伏严重程度与倒伏指数相比,相关性在0.77~0.93之间。Su等[97]使用灰度共生矩阵提取玉米倒伏前后可见光图像纹理特征,同时也通过倒伏前后DSM数据相减方式,分别获得倒伏面积,其估计误差分别为10.00%和0.85%。说明相对纹理指标,株高更能准确地测定倒伏程度和面积。
(4)辅助育种。株高是由多基因控制的数量性状[102],易受环境、基因型及其互作的影响,通过高度的变化特征可以更好地研究作物生长的遗传机制[85,103,104]。Hassan等[85]对株高性状进行全基因组和数量性状基因座(Quantitative Trait Locus,QTL)标记,结果发现无人机估测小麦株高所预测的基因组值与实际值相关性在0.47~0.53之间,与地面实测值比较,二者呈现相似的基因组预测能力。目前,越来越多研究通过遥感方式获取作物株高用于育种[105,106],遥感手段已被大量试验证明可以获取高频次、高精度、重复性好的连续冠层高度分布数据,对作物育种具有重要现实意义[97]。
综上,在近地遥感测高的农业应用研究中,由于经验统计回归方法具有技术门槛低、反演参数少、方法简单有效等优势[107],作物长势参数大多是通过该方法进行估测(表1 )。但是该模型需要大量实测数据进行反演,缺乏明确的物理意义。部分应用通过株高等性状建立机器学习模型优化作物长势反演结果,但在实际应用中,一般需要单独建模以适应作物品种、生育期等因素的变化。Yu等[82]尝试将甘蔗的株高性状与农田水文模型耦合,构建了新的数据同化系统,有助于提高禾本科作物的产量估计精度。株高数据与作物模型的同化,可提高作物性状的反演精度,并实现模型的时空扩展。因此,未来研究可以通过将株高融入作物模型等方式改进作物长势参数反演精度,解决经验模型和传统机器学习模型普适性弱、稳定性差的问题。
5 存在的问题与展望
5.1 测高精度与成本的平衡问题
表2 基于精度和成本角度总结不同数据完备性下的作物株高估算Table 2 Evaluation summary of accuracy and cost for crop height estimation |
| 类别 | 条件 | 精度 | 成本 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| DTM | GCP | 地面数据 | 冠层密度 | R² | RMSE | 人工成本 | 时间成本 | 操作成本 | |
| 1 | √ | √ | 稀疏/密集 | ★★★★★ | ★★★★ | ★★☆ | ★☆ | ★★ | |
| √ | 稀疏/密集 | ★★★★★ | ★★★★★ | ☆ | ☆ | ☆ | |||
| 2 | √ | 稀疏 | ★★★★★ | ★★★★ | ★★★☆ | ★★★★ | ★★★ | ||
| 密集 | ★☆ | / | ★★★☆ | ★★★★ | ★★★ | ||||
| √ | 稀疏 | ★★★★★ | ★★★★★ | ★☆ | ★★★ | ★☆ | |||
| √ | 密集 | ★☆ | ★★ | ★☆ | ★★★ | ★☆ | |||
| 3 | √ | 稀疏 | ★★ | / | ★★★★ | ★★☆ | ★★★★ | ||
| 密集 | ★★ | / | ★ | ★★ | ★★ | ||||
| √ | 稀疏 | ★★ | ★★★ | ★★★★ | ★★☆ | ★★★★ | |||
| √ | 密集 | ★★ | ★★★ | ★ | ★★ | ★★ | |||
| 4 | 稀疏 | ★ | / | ★★★★★ | ★★★★★ | ★★★★★ | |||
| 密集 | ★ | / | ★★★★★ | ★★★★★ | ★★★★★ | ||||
| √ | 稀疏 | ★ | ★☆ | ★★★ | ★★★★ | ★★★☆ | |||
| √ | 密集 | ★ | ★☆ | ★★★ | ★★★★ | ★★★☆ | |||
|
DTM数据一般在作物出苗前或收获后采集,以避免作物对土壤造成的遮挡。然而,在作物冠层稀疏的情况下,可以从DSM中提取裸土高程作为基底,该方式能降低数据采集成本,并且裸露土壤较多的情况下能够获取与完备条件下近似的精度(具体见3.3.2)。然而,当作物冠层已经密闭且地形起伏大时,难以通过对裸地进行插值的方式实现准确地DTM构建,该种情况下,采集单独一期的DTM数据是有必要的。
在无人机图像拼接时,通过导入同一套GCP能够实现多幅图像间的配准并提高图像质量,因此可以观测特定作物植株或群体株高的动态变化。然而,在地势崎岖、区域分散或有灌溉系统的大田中,GCP的布设难以实现[75]。同时需要实时动态(Real-Time Kinematic,RTK)等仪器测量GCP的空间位置,其信号强度易受周围环境影响,如高压电线、变压器或地形等。因此,从农业生产的角度而言,进行GCP布设和位置信息收集的难度较大,成本较高。在难以实现GCP的田间布设时,从图像中直接提取GCP可以有助于多期数据间的配准,但通常测高精度会低于完备数据的情况。
5.2 无人机遥感平台的精细测高问题
低空无人机被动遥感以成像方式构建三维模型获取大田作物株高,对于玉米、水稻、小麦等叶片直立而狭长的作物,尤其是穗部或叶尖处的高度信息提取难度大,易造成作物株高的低估。Liu等[111]使用Mavic Pro2采集图像后构建冠层三维点云直接进行株高量测,飞行高度为5 m,但仍然不能恢复其完整的穗部结构。
由可见光图像导出作物高程是一种间接测高方法,而激光雷达是通过点云数据直接测量,其测高精度通常优于可见光方式[20,21]。目前,已有一些轻小型化的激光雷达搭载于无人机上对作物测高研究进行了初步探索(表3 ),其重量均在4 kg以下,测量精度为0.5~5 cm。然而,由表3 可见,只有通过降低测量高度情况下(测量高度低于20 m)作物的株高测量精度较好,表3 其余作物株高测量结果的R 2均在0.8以下。而且,这些激光雷达仍未解决成本高问题。以上是限制无人机搭载激光雷达模式在农业领域发展的重要原因。大疆创新科技有限公司于2020年10月发布了一款“禅思L1”,该系统集成了低成本、轻小型的Livox系列激光雷达AVIA。Hu等[112]人评估了同品牌的MID 40在森林资源清查中的应用,在100 m飞行高度下可以获得密度大于464 pts/m2的点云数据,能够精确地计算树高、林冠覆盖率、林隙分数等森林表型信息。AVIA相较于MID 40具有更大的FOV(视场角)和点云数据率,从而可以提高数据采集效率和点云密度,然而,还未有研究将其应用于大田作物的表型提取。目前,激光雷达系统的高成本以及点云密度、测距精度等性能无法满足农田作物表型精确测量仍是遥感测高中急需解决的问题。
表3 无人机搭载激光雷达系统的测高研究Table 3 Studies on the height measurement of UAVs equipped with LiDAR system |
| 传感器 | 观测 对象 | FOV /(°) | 测距精度/cm | 重量/kg | 飞行速度/(m·s-1) | 测量高度/m | 点云 密度/(pts·m-2) | 精度 |
|---|---|---|---|---|---|---|---|---|
| Livox MID 40 | 林木[112] | 38.40 | 2.00 | 0.76 | 4.00 | 100.00 | 464.5 | R 2=0.96,RMSE=0.59 m |
| RIEGL VUX-1UAV | 玉米[78] | 330 | 0.50 | 3.50 | 3.00 | 15.00 | 112.0~570.0 | R 2=0.96,RMSE=0.13 m |
| 小麦[26] | 5.85 | 41.84 | 997.0 | R 2=0.78,RMSE=0.03 m | ||||
| 马铃薯[26] | 5.85 | 41.84 | 833.0 | R 2=0.50,RMSE=0.12 m | ||||
| 甜菜[26] | 5.85 | 41.84 | 933.0 | R 2=0.70,RMSE=0.07 m | ||||
| 玉米[113] | — | 150.00 | 420.0 | R 2=0.65,RMSE=0.24 m | ||||
| 大豆[113] | — | 150.00 | 420.0 | R 2=0.40,RMSE=0.09 m | ||||
| Velodyne VLP-16 | 棉花[4] | 360 | 3.00 | 0.83 | 2.00 | 9.00 | 1682.0 | RE=12.73%,RMSE=0.03 m |
| 大豆[114] | 0.50 | 9.00 | 1600.0 | RE=5.14% |
|
5.3 遥感测高与农学测高的差异问题
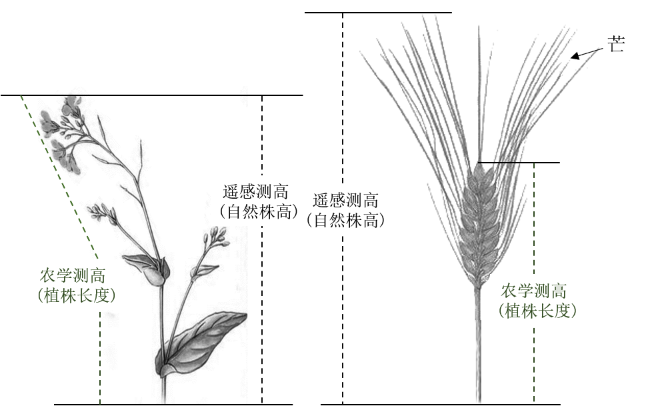
作物的形态结构会因栽培措施、环境、品种等因素产生变化。并且,农学上的作物株高测量通常不包含禾本科作物的芒及豆科作物的卷须等部分[115]。然而,遥感测高一般获取田间作物在自然状态下植株全部结构的顶端到地面的垂直距离,因此会与农学测高结果不同。为方便表述,下文使用自然株高和植株长度分别表示遥感和农学测取的作物高度(图5 )。例如,受栽培措施影响,小麦株型会产生变化,根据旗叶形态结构可以划分为“直立型”和“下披型”[116],通过遥感手段容易对“下披型”作物的真实植株长度产生低估;遥感方式获取的自然株高能够辅助倒伏区域识别、倒伏程度测定,但无法提供倒伏后的真实植株长度;同样,遥感测高方式会将作物的芒计算在内,以上情况皆不能获取作物真实的植株长度,进而影响估产等应用。遥感测高需要根据农业应用需求有针对性地制定株高测量方案。当作物的自然株高与真实植株长度有差异时,可以尝试通过多种传感器协同进行株高提取。例如通过可见光相机获取纹理图像识别植株主体部分,再使用激光雷达进行植株的骨架提取,针对弯折部分采取分段式株高量测。多相机倾斜摄影测量技术能够获得地物丰富的纹理信息[117,118],通过建立作物三维模型也能够为倾斜状态下的作物植株长度量测提供一种解决思路。
5.4 未来研究方向展望
近十年来,近地遥感技术在大田作物测高研究中得到广泛应用,能够实现大面积作物的同步监测,获得高精度、重复性好的作物株高数据,考虑到近地遥感技术仍面临多种问题,未来该领域主要可以从以下4个方面展开科学研究。
(1)无人机作为作物株高获取的主要平台,需要提高有效载荷和续航能力,而测高传感器需要向轻小型、低成本方向发展,实现作物株高高效、大面积的观测。
(2)被动式传感器无法穿透作物冠层,需要单独执行一次飞行任务采集裸地高程或者通过从DSM中提取土壤部分进行插值获得DTM,前者会增加数据采集成本,而后者在裸露土壤较少时DTM提取精度较差。因此需要改进裸地探测算法与插值算法,以实现小样本量的裸地插值以及在复杂大田环境下的精准裸地探测,从而提高数据采集效率、改善测高精度。
(3)作物株高在农业中应用广泛,一方面株高可用于作物多种长势参数估测,但其反演方式以经验统计、传统机器学习方法为主,需要探索针对不同作物、不同生育期、不同环境中的长势反演通用模型。另一方面,加强遥感与遗传育种研究的结合,可为株高遗传机制研究提供高通量的株高数据,突破现有作物形态指标数据获取效率瓶颈,能够促进大田作物遗传育种研究,实现粮食产量与质量的提高。
(4)遥感和农学测高方式存在一定差异,需要结合作物株型结构特点和科学问题,有针对性地进行作物株高提取方法研究以满足科学研究和实际应用的需求。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}