



1 引 言
近年来,随着计算机技术的发展,直接基于计算流体力学(Computational Fluid Dynamics,CFD)数值模拟雾滴运动,尤其是定常流场状态下的雾滴运动规律逐渐成为可能。目前研究主要集中于地面风送式喷雾模拟,风场、喷雾结构简单,未涉及包含复杂非定常旋翼风场作用的雾滴运动过程模拟。例如Tsay等[5]对无冠层条件下、Delele等[6]和Dekeyser等[7]对存在冠层条件下的空气助力喷雾过程分别开展CFD模拟,评估了不同作业参数下的空气助力喷雾系统效果,从而优化作业参数、评估喷雾飘移特性、减少喷雾飘移损失。Endalew等[8-10]对空气助力地面喷雾机开展了详细的数值模拟研究,包括模型构建、气流场速度分布、不同喷雾机型影响、目标冠层影响等。Duga等[11]和Baetens等[12]基于三维CFD模拟了风送雾滴的飘移运动过程,考虑通过使用减少飘移和标准喷嘴的组合,避免地面沉积损失的增加,同时减少药液飘移距离。
由于植保无人机施药应用呈现爆发式增长,对施药效率、施药质量、环境污染潜在风险评估的需求日益凸显,而雾滴沉积飘移模拟起步较晚,面临研究难度大,相关研究数量和积累又远少于固定翼有人机施药研究,无法及时满足上述需求的快速增长。因此,本文拟对现有植保无人机施药雾滴沉积飘移数值模拟关键技术与验证方法研究进展进行梳理,分析未来发展方向,以促进该领域研究取得新突破。
目前关于植保无人机施药研究存在的主要模型研究手段包括:无粘模型、计算流体力学模型(包括有限体积法和有限差分法模型)以及格子玻尔兹曼模型。本文就这些模型的适用范围、计算开销和模拟精度等方面进行了总结,并提出了各模型未来优化改进研究方向。本文还针对目前已有的田间和室内实验数值模型验证手段提出了发展优化高时空精度的非定常流体测量技术,提升模型模拟精度的建议,为植保无人机施药模拟工作发展提供支撑。
2 植保无人机施药数值建模关键技术
2.1 无粘模型
航空施药雾滴飘移预测领域最为常用的AGDISP软件即建立在无粘方程基础上。由于其并不直接求解纳维-斯托克斯 (Navier-Stokes)方程,因此仅能针对尾涡简化后的有人驾驶直升机开展雾滴飘移模拟,主要通过将固定翼或有人驾驶直升机尾涡进行二维简化,直接模拟二维涡对近地发展过程。虽然为了体现粘性影响增加了尾涡整体耗散系数及雾滴云团扩散系数,但仍无法准确模拟植保无人机复杂三维流场作用下的雾滴飘移问题。2018年,Teske等[15]将一种基于涡元法的无粘尾涡模型(Comprehensive Hierarchical Aeromechanics Rotorcraft Model,CHARM)整合入最新的AGDISP雾滴飘移预测模型,解决了AGDISP无法开展近地小型多旋翼无人机施药雾滴沉积飘移预测的问题。
2.1.1 三维近场CHARM模型
基于涡元法的无粘尾涡模型(CHARM)于上世纪80年代末开发完成,其主要功能是模拟尾流发展,最初用于研究军用直升机旋翼气流对航母甲板人员的影响,军械弹道影响,以及沙漠地形扬尘影响。其融合并改进了早期算法“旋翼飞行器(RotorCRAFT)”和“基于影响系数的悬停表现评估(Evaluation of Hover Performance using Influence Coefficients,EHPIC)”的大多数功能[16-18],包含旋翼涡元升力面模型、升力/非升力面的源/偶极子模拟方法,以及独有的常数涡量云图(Constant Vorticity Contour,CVC)全翼展自由尾涡模型[19,20]。
(1)CVC模型。CVC模型能够用于模拟复杂的旋翼翼尖涡结构及其演化过程。不直接进行速度场模拟,而是从旋翼旋转平面出发,基于流场中分布的强度不变的大量涡元,将其按当地涡量分布进行疏密排布,并依据涡元诱导速度叠加来获得全场的速度分布。涡元诱导速度遵循毕奥萨伐尔定律(Biot-Savart Law):
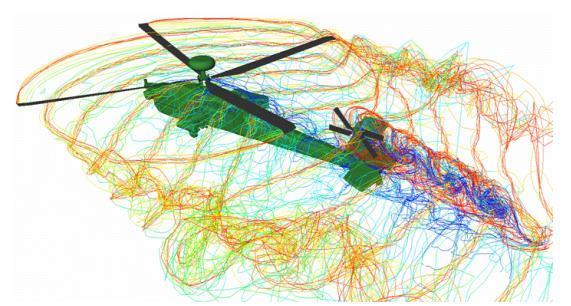
其中, 为涡矢量; 为位置矢量; 为速度矢量; 为到涡线垂直距离,m。CVC模型的涡线自动遵循总涡量守恒的亥姆霍兹/开尔文定律,翼尖涡旋转半径不受不同的飞行条件和飞机型号影响,但存在无粘点涡模型固有的无法模拟尾涡耗散作用和湍流作用的问题[21]。其模拟结果如图1 所示。
(2)旋翼涡元升力面模型。旋翼涡元升力面模型主要用于针对复杂旋翼外形表面涡流的简化处理。目前,旋翼可由四个恒定强度的直线涡流组成的四边形表示。通过假设每个旋翼四边形控制点上的涡元诱导速度,将翼面环量与涡元诱导速度关联。将流场中其他涡元诱导速度叠加,求得旋翼约束环量。然后应用茹科夫斯基(Joukowsky Theorem)定理,求解旋翼表面力和力矩。
(4)分级涡元法模型。CHARM开发完成后多次被用于对整机模型悬停及前飞状态下的精准模拟,并逐渐发展出针对多旋翼尾流模拟的功能[18,19]。为了提升CHARM模拟的实时性,研究人员引入了分级涡元法(Hierarchical Fast Vortex,HFV)。该方法最初基于Appel[25]开发,在计算具有N个涡元的自由涡流尾流问题时,中央处理器(Central Processing Unit,CPU)每次迭代计算量增长量级达O(N2)。HFV方法进一步将计算域分成不同的长方体区域,并基于影响系数、多极展开和泰勒级数展开,采用八叉树网络将不同区域内涡元进行缩并,将CPU每次迭代计算量量级从O(N2)降低至O(NlogN)[20]。对于一个拥有35,000涡元的算例而言,HFV方法能够将计算量减少至原始算法的1%,从而极大提升模拟速度。
2.1.2 AGDISP雾滴飘移模型
CHARM模型主要围绕旋翼三维近场范围内的速度场模拟,在远场速度模拟时因缺乏粘性和湍流模型,模拟精度会大幅下降,也未涉及雾滴运动过程模拟。因此作为雾滴飘移模型,AGDISP能够与其实现优势互补,共同为植保无人机施药模拟提供完整解决方案。AGDISP采用的雾滴运动模型较为简单,主要包括雾滴在近场、远场和冠层中的运动模拟。
(1)近场模拟。在1000 m区域内的雾滴飘移沉积模拟方面,AGDISP采用基于拉格朗日方法的雾滴运动模型,主要考虑雾滴重力及气动曳力对雾滴运动的影响,忽略雾滴附加质量力、Saffman力、湍流影响等次要作用力,简化后的雾滴受力控制方程为:
其中, 为雾滴坐标,m; 为气液速度差,m/s; 为重力加速度,m/s2; 为液滴弛豫时间,s。
其中, 为液体密度,kg/m3; 为空气密度,kg/m3; 为液滴直径,m; 为液滴气动阻力系数。
上述控制方程最大程度地保留了雾滴空间中的受力情况,并简化了雾滴运动模拟的计算量。但由于对空气速度的模拟方面缺乏湍流模型的支持,其无法对大气边界层速度脉动量和湍动能耗散率等系列参数进行准确估计,因此空气速度 的估计误差会被引入雾滴运动受力方程,进而影响雾滴运动模拟准确性。
(2)远场模拟。为了减小计算量,AGDISP在1000 m外的远场区域不再计算具体单个雾滴运动过程,而是采用基于高斯分布的雾滴云团分布估计,雾滴体积空间分布为:
其中,f为雾滴体积分数;Q为流量,m3/s;x为下风距离,m;y为流向距离,m;z为高度,m;H为作业高度,m; 为大气边界层混合高度,m; 为雾滴沉降速度,m/s; 为平均风速,m/s; 、 为雾滴云团流向、垂直标准差;j为用于加和的系数1和2。上述方程引入了大气边界层混合高度,将大气稳定性的部分影响纳入雾滴沉积预测模型,因此在简化计算量的同时具有良好的实用性。
其中, 圆柱半径,m; 时间,s; 为接触角,( );Ohnesorge数 ; 为动力粘度系数,N·s/m2; 为密度,kg/m3; 为液滴直径,m。对液滴叶面碰撞破碎过程,引入临界碰撞参数K。
其中, ,可基于Forster的理论对临界碰撞参数K进行估计,从而判定雾滴是否破碎[29]。
2.1.3 耦合模型分析
综合来看,AGDISP作为全球通用的雾滴飘移预测工具具有快速、稳定的模拟功能,而无粘模型CHARM也极大减小了复杂风场作用下的雾滴运动预测计算量。二者整合后的模型理论上能够提供无人机作业条件下旋翼复杂下洗流场随时间变化的全过程模拟,以及在此气流场条件下的雾滴实时运动过程模拟[3,15]。该模型的优势在于计算过程简单,模拟耗时少,但由于缺乏粘性作用和湍流模型,其雾滴运动模拟精度受到影响。2018年Teske等介绍了基于CHARM和AGDISP模型开展的针对DP-12双旋翼和ICON八旋翼两种不同机型无人机施药在不同侧风条件下的雾滴运动过程的模拟结果,标志着植保无人机施药过程模拟拥有了完整的无粘模型解决方案[15]。
Teske运用CHARM模型模拟了植保无人机尾流发展过程,之后将AGDISP模型中的雾滴运动控制方程引入,对尾流作用下的雾滴潜在运动过程进行了模拟。通过分析不同作业速度条件下的下洗气流强度和雾滴地面沉积率,提出了植保无人机施药临界速度概念,发现当植保无人机作业速度超出某个临界速度后,由于下洗气流强度减弱,施药沉积效果将严重下降。
但目前CHARM和AGDISP整合后的模型仅有Teske等进行了简单介绍,其实际应用效果仍不明确,也远未完善。从Teske等发表文章的情况看,首先AGDISP的风场模拟部分是准二维投影模式,暂时未与CHARM模型的三维风场进行整合。因此目前耦合模型只能沿用CHARM模拟的三维风场并在其中加入AGDISP的雾滴飘移模型,从而导致模拟雾滴飘移距离受限,且无法模拟环境参数变化带来的影响。其次AGDISP中包含的冠层模型无法应用于目前的耦合模型。最后,耦合模型对植保无人机施药雾滴沉积的联合模拟结果尚未得到任何实验验证。因此以AGDISP和CHARM为代表的植保无人机施药无粘耦合模型还需更多田间实验对比测试及更多详细的模拟信息披露以证明和完善其实用性。
2.2 计算流体力学模型
随着计算机技术的快速发展,基于CFD的数值模拟方法应用越来越广泛。CFD方法可选用多种湍流模型,能够准确模拟流体粘性和湍流耗散过程,因此在对复杂风场的模拟方面相对AGDISP软件具有天然的优势。目前已有的研究主要集中在无人机悬停及前飞条件下的风场分布及近场雾滴分布,以定常流平均场模拟为主,还包括地面、冠层等因素对风场的影响研究。但由于旋翼尾流的复杂特性,对计算资源的消耗很大,已有研究尚无法对雾滴飘移全过程开展动态模拟。
CFD的主要原理是通过求解基本的流动控制方程包括连续性方程、动量守恒方程得到气流速度时空分布,其控制方程如下。
连续性方程:
Navier-Stokes动量守恒方程:
其中, 为空气密度,kg/m3; 为气流平均速度矢量,m/s; 为气压,N/m2; 为粘性应力张量,N/m2。由于湍流的复杂性,目前工程上通常使用雷诺平均方程(Reynolds-averaged Navier-Stokes equations,RANS)处理Navier-Stokes方程。雷诺平均将湍流瞬时运动分解为平均运动和脉动运动两部分,把脉动运动部分对平均运动的贡献通过雷诺应力项来模化,通过湍流模型来封闭雷诺平均Navier-Stokes方程。除了流动控制方程不同,计算流体力学模型中的雾滴运动控制方程也比无粘方法要复杂得多,主要通过对拉格朗日坐标系下颗粒作用力的微分方程贝赛特-鲍瑟内斯克-奥森(Basset-Boussinesq-Ossen,BBO)方程进行积分来求解。在笛卡尔坐标系下,颗粒的BBO方程为:
其中, 是压力梯度项; 是附加质量力项; 是Basset力项; 是离散相颗粒的气动阻力项;阻力修正系数 ; 为连续相的速度,m/s; 为离散相颗粒的速度,m/s; 为流体的动力粘度,kg/(m·s); 为流体的密度,kg/m3; 为离散相颗粒的密度,kg/m3; 为颗粒的粒径,m。
液滴与湍流的相互作用则通过离散随机游走模型模拟。将每个涡定义为高斯分布的随机速度波动,即u'、v'和w',以及时间尺度 。速度脉动定义为 ,涡旋特征寿命 ,其中ζ为正态分布随机数,k为湍流动能,ε是湍流耗散率。
上述方程一般通过离散化进行数值计算求解,具体方式包括有限体积法和有限差分法等。
2.2.1 有限体积法
由于上述流动控制方程为非线性偏微分方程,无法得到精确解。CFD通过数值求解得到这些偏微分方程的近似解。目前常用的计算流体力学软件Fluent、CFX、Openfoam等均基于有限体积法离散控制方程,将偏微分方程转换为代数方程组,求得该方程组的解,作为偏微分方程的数值近似解。
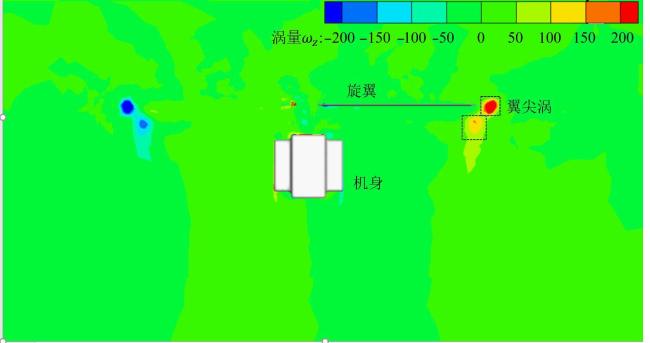
由于有限体积法在商用计算软件中的普及,目前针对植保无人机的风场模拟结果大部分来自有限体积法。但有限体积法受网格质量影响较大,其常用的迎风格式精度有限(2阶精度),在相同网格密度条件下,模拟旋翼翼尖涡时相对有限差分法更容易产生人工耗散,从而导致其模拟的翼尖涡耗散速度远快于实际情况。实际应用过程中容易导致因计算资源不足而缩减时空精度或尺度。如图2 所示,低精度格式产生的翼尖涡在2个周期内耗散。目前基于商用软件进行的植保无人机风场模拟结果表明,有限体积法的植保无人机施药模拟尚无法完整复现旋翼翼尖涡发展过程,其非定常流场模拟准确性受到一定制约。
目前关于植保无人机下洗风场和施药过程模拟的主流研究方向为有限体积法,如杨风波等[30,31]基于Fluent模拟多旋翼飞机悬停状态下的下洗气流场速度分布及雾滴空间分布情况,并结合室内悬停实验进行验证。模拟使用了约560万个网格,忽略了机身影响,使用k-ε湍流模型。从风场模拟结果看,其能够反映整体风场空间分布形态,标记点平均风速模拟值与实验测量结果误差在9%以内,具有良好的模拟准确性,但对瞬时翼尖涡精细结构发展的模拟损失较大,难以观察到翼尖涡发展演化过程。Shi等[32]进行了前飞状态直升机下洗风场和雾滴喷施的模拟,使用478万个网格,采用了SST-k-ω湍流模型,成功模拟了植保无人机施药雾滴地面沉积分布。该雾滴沉积模拟结果与田间实验结果吻合度良好;但对风场发展并未关注,难以判断是否具有良好的风场结构模拟准确度。Zhu等[33]对定常流旋翼下洗风场作用下的雾滴沉积飘移过程开展了模拟,使用22.8万个网格,采用定常模拟旋翼下洗风场。之后将粒子注入风场并模拟不同侧风条件下的雾滴偏移沉积情况。该模拟未关注旋翼下洗气流的非定常特性及翼尖涡演化等问题。张宋超等[34]模拟了N-3型农用无人直升机航空施药雾滴飘移过程,采用130万个网格以及面源喷雾模拟,模拟结果与实验结果相差较大,原因可能是实验与模拟条件差异、荧光示踪剂日光分解影响实验结果等,模拟未关注风场分布情况。张豪等[35]、杨知伦等[36]对旋翼下洗气流对喷幅影响,以及冠层对旋翼下洗气流的影响进行了模拟,对有/无冠层情况分别采用734万和590万个网格进行模拟,与实验结果对比最大模拟误差在20%左右,从模拟风场结果看,旋翼翼尖涡结构并不清晰。上述研究主要集中于对植保无人机下洗风场及雾滴近场范围沉积的模拟,并与实验结果进行了对比。研究涉及模型结构地表、环境条件多样,显示了有限体积法良好的鲁棒性和适应性。但受有限体积法格式精度条件限制,对流场精细结构的分析还较少,也尚未涉及大范围雾滴运动分析。
2.2.2 有限差分法
与有限体积法不同,有限差分法将求解区域离散成差分网格,以有限个节点代替连续求解域,用网格上的差商代替格点上的空间导数,从而将微分方程转化为以网格节点参数作为未知量的差分方程组,然后进行求解。
相对于有限体积法来说,有限差分法所采用的结构化网格更易于构造高阶精度的数值格式。高阶数值格式如加权本质无震荡(Weighted Essentially Non-Oscillatory,WENO)/本质无震荡(Essentially Non-Oscillatory,ENO)格式等可达4~5阶精度,配合自适应网格技术,达到对翼尖涡演化的高时空精度模拟,能够复现真实旋翼下洗流场的典型流动结构发展过程。
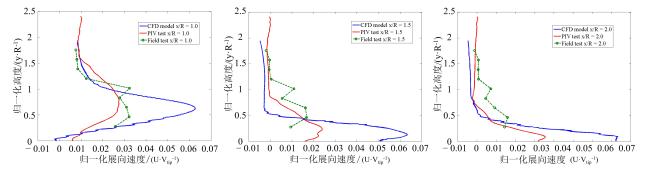
目前有限差分法还主要应用于基础研究领域,如Xu和Weng[37]基于NACA0012翼型单直旋翼,构建基于不同高精格式的验证模型,使用137万个网格。模拟结果可以明显看出高精格式在相同网格条件下能够保留更多的旋翼翼尖涡精细结构,并降低翼尖涡人工耗散,使其在更多周期后仍保持基本形态。Lakshminarayan等[38]运用高精格式对微型共轴双旋翼悬停风场进行了细致模拟,网格数量达660万个,重点关注了旋翼翼面流动参数模拟精度及翼尖涡与旋翼作用及演化过程的模拟准确度。Kalra[39]则利用嵌套网格加密旋翼翼尖涡区域,以高精WENO格式计算旋翼下洗风场结构,应用网格数量达2160万个。研究发现高精格式算法可模拟多个旋转周期后的翼尖涡结构演化过程,流动结构与室内实验结果几乎完全吻合,近地面展向速度剖面仍与实验结果存在约25%的误差。上述研究相对有限体积法拥有更高的模拟精度,能够更好地模拟旋翼翼尖涡运动和耗散过程,但都未模拟复杂机身结构外形,也未涉及作物冠层及雾滴运动过程模拟,无法为植保无人机施药过程模拟提供直接解决方案。
目前有限差分法在实际应用中仍面临许多问题,如对于复杂外形的模型难以构建与该算法相适应的结构化网格,算法存在对于两相流算法的兼容性问题,对作物冠层的建模方法尚未完善,对大空间三维建模的算力要求过大等,目前仅适用于简单外形及环境参数作用下的流动机理研究。基于有限差分法的无人机施药数值模型短期内仍难以推广。
2.3 格子玻尔兹曼模型
近年来,一种基于格子玻尔兹曼方法(Lattice-Boltzman-Method,LBM)的计算流体动力学方法在计算具有复杂边界条件和非平稳运动物体的三维流场问题中逐渐显示优势[40]。
2.3.1 LBM模型原理
LBM是一种笛卡尔坐标系下离散点对应速度在格子节点空间分布的粒子化方法。与计算流体力学模型基于连续介质假设下的Navier-Stokes方程不同,LBM基于分子运动理论的玻尔兹曼方程,在宏观层面兼容Navier-Stokes方程,并拥有更广泛的适用性,主要通过流场平衡态分布函数和碰撞算子进行迭代计算。一种典型的3维27自由度(D3Q27)的LBM如图3 [41]所示。
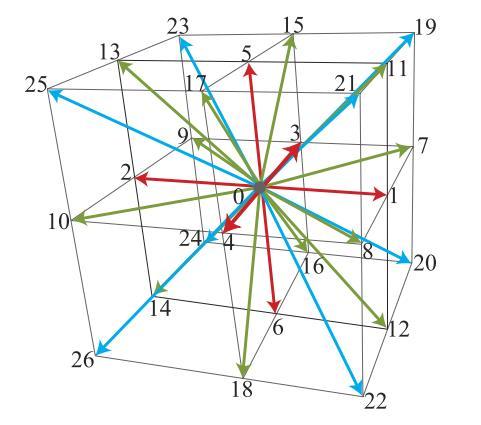
此方法基于粒子碰撞原理,每个离散单元具备较高自由度,整体自然达到4阶空间离散精度[42],能够以高精度模拟旋翼翼尖涡产生及发展过程,在相同网格数的前提下比传统有限体积方法拥有明显模拟精度优势。同时该方法的并行计算效率几乎不受核心数量限制,更适合开展并行计算,提高模拟速度。图3 所示的D3Q27离散速度模型参数见表1 ,其中声速为 ,离散速度 ,权重 ,c = δx/δt,其中 δx及δt为格子时空步长。
表 1 D3Q27 离散速度模型参数Table 1 Parameters of the D3Q27 discrete velocity model |
| 模型 | 格子声速 | 格子离散速度 | 权重 |
|---|---|---|---|
| D3Q27 | (0, 0, 0) | 8/27 ( ) | |
| ( , 0, 0), (0, , 0), (0, 0, ) | 2/27 ( ) | ||
| ( , , 0), ( , 0, ), (0, , ) | 1/54 ( ) | ||
| ( , , ) | 1/216 ( ) |
LBM主要通过平衡态函数的不断迭代更新来模拟流场各参数的演变。流体平衡态分布函数 的发展方程为:
其中, 是动量分布函数的线性转化矩阵: ; 是位置矢量; 是碰撞矩阵; 为动量,kg·m/s; 为外力,kg·m/s2; f 表示如下矢量:
等效动量 ,碰撞矩阵 为27 × 27 矩阵。
2.3.2 LBM模型特性
LBM模型自身具备一些独特的特性,有利于其处理复杂外形、复杂流场条件下的高精度模拟问题。由于格子模型结构符合八叉树结构,天然具备自适应的优势,有利于处理复杂外形、复杂流场等的计算,既可以对旋翼翼面、机身、冠层等复杂表面进行加密,提升壁面边界层模拟准确性,也可以基于涡量分布对涡量集中区域的网格尺寸进行实时加密,从而动态提高旋翼尾涡结构辨识精度。因此更有利于针对植保无人机旋翼下洗风场进行高精度模拟。
基于LBM的商用软件XFlow采用壁面适应局地涡粘模型。由于LBM受格子形状所限,一般壁面附近的网格尺寸较大,需要匹配专门的湍流模型以提升壁面边界层计算精度,降低计算量。由于速度梯度张量在当地自动满足LBM,从而极大提升了壁面大涡模拟的效率。而对有限体积法来说,速度梯度张量作为空间导数,需要临近节点的信息参与计算。因此大涡模拟壁湍流模型在LBM中相对有限体积法拥有更高的运算效率。
针对中心动量空间散射模型采用多松弛时间方法,可独立调节不同松弛时间来控制稳定性,相对传统的Bhatnagar-Gross-Krook(BGK)模型来说具有更高的稳定度。另外还克服了一些BGK模型存在的明显问题,例如Prandtl数以及动力粘度与第二粘度比值无法改变。
2.3.3 LBM模型应用
目前植保无人机施药研究领域,LBM已获得初步应用。例如Zhang等[43]运用LBM模拟了旋翼下洗风场在不同高度及作业速度条件下的形态变化,获取了流场精细结构的空间分布演化情况。与田间风场测量结果对照显示,模型成功复现田间实验中测得的风幕现象,显示了该模型良好的流场结构模拟准确度。文晟等[44,45]运用LBM对植保无人直升机及多旋翼植保无人机下洗风场分别开展模拟,其翼尖涡可保持约三个周期,还显示了尾桨涡和螺旋尾涡的发展过程。同时在风场中按喷头实测结果加入不同粒径分布的雾滴,模拟了雾滴在不同作业参数下的近场分布情况。但上述研究主要集中在机体尾流风场及幅宽内雾滴空间分布上,但仍存在缺乏与相同条件下的实测结果详细对照,缺乏远场雾滴运动模拟数据等问题。作者团队[46,47]基于无人机实际作业参数进行全尺度三维空间建模,以地面为固定参考系,实现了无人机巡航状态下洗风场动态建模。模拟时长达12 s以上,空间范围达80 m(长)×60 m(宽)×10 m(高)。
在获得流场运动规律的基础上,对拉格朗日坐标系下颗粒作用力的微分方程进行积分来求解离散相颗粒的运动轨迹,可实现雾滴沉积规律的预测。目前基于LBM的商用软件XFlow对于雾滴运动建模的功能还相对简单,雾滴运动模型采用了类似AGDISP所使用的雾滴运动方程:
其中, 为雾滴速度,m/s; 为雾滴气动阻力造成的加速度,m/s2; 为重力加速度,m/s2。由于公式(15) 缺乏雾滴蒸发模型,而无人机施药过程中多采用高浓度药液,因雾滴蒸发导致的沉积飘移模拟误差相对有人机作业模拟误差较小,因此该方法目前更适合用于无人机施药过程的模拟。
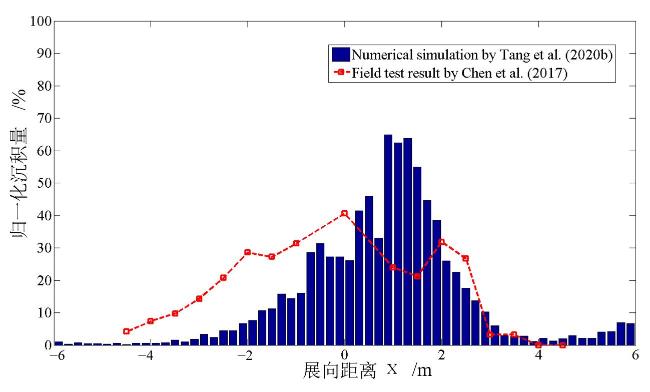
一组针对不同作业高度的植保无人机施药空间分布情况如图5 所示。从图中可以看出,运用LBM能够在三维大尺度空间上模拟雾滴运动的时间累积过程,获取不同作业状态下不同时刻的雾滴空间分布特性,并具备较高的时空分辨率。这一优势有助于对不同作业机型、环境参数、喷雾条件下的雾滴沉积飘移特性进行快速模拟并总结出相关定量性规律,从而为分析优化作业参数及机型设计提供有力支持。基于LBM模拟植保无人机施药雾滴地面沉积分布结果与田间实验结果对比如图6 所示。其结果显示幅宽内雾滴相对沉积量的模型预测结果和田间实验结果差异在可接受范围,LBM雾滴沉积模拟结果可信。
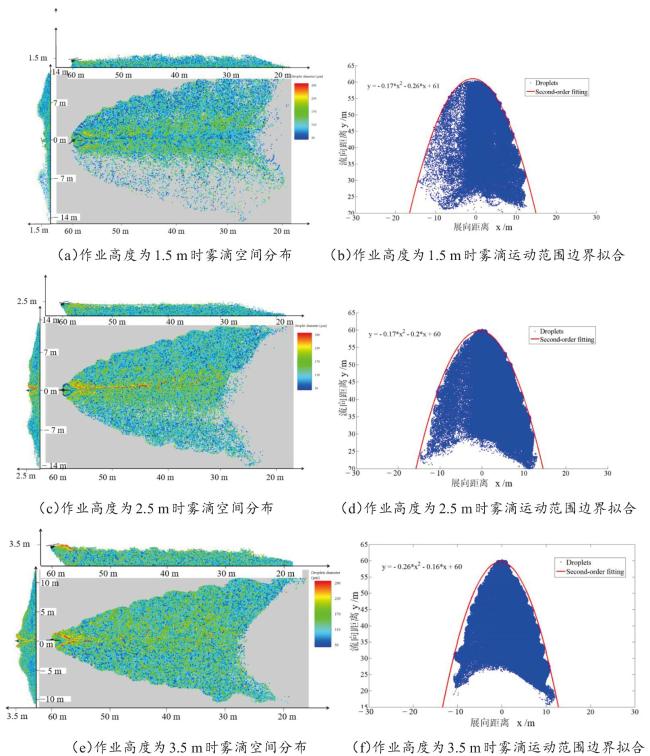
图5 基于格子玻尔兹曼法模拟的不同作业高度植保无人机施药空间分布规律[46]Fig. 5 Droplet spatial distributions of UAV spraying for different flight heights based on LBM simulation |
3 数值模型的验证
上述无粘模型、计算流体力学模型及格子玻尔兹曼模型模拟结果的可靠性和准确性均需要通过对植保无人机旋翼下洗风场,施药雾滴地面沉积分布等参数的实际测量予以验证。目前主要验证手段主要有田间采样和室内测量两种。
3.1 田间采样方法
在速度场测量方面,主要通过点阵分布式测量手段大规模布设速度测点,进行植保无人机旋翼下洗风场测量。如李继宇等[52]利用田间无线微气象风速传感器阵列测量多旋翼植保无人机下洗风场法,发现实际作业风场存在风幕效应,风幕两侧风速存在突变。王昌陵等[53]同样基于田间无线微气象风速传感器阵列获取了三种不同植保无人机在不同方向上的下洗气流速度场分布。杨风波等[30]采用转轮式风速计逐点测量多旋翼植保无人机悬停状态下的风场分布情况,用于验证数值模型对下洗风速的模拟精度,实验测量结果与模拟结果差异在10%以内。上述研究采用的转轮式传感器成本较低,适合进行阵列式布置开展大范围田间实验,但由于存在转子旋转惯性,其对高频气流方向变化的响应频率较低,在测量植保无人机旋翼下洗气流这种非定常流场时效果较差,在气流速度变化幅度明显的区域延迟时间较长,影响测量结果准确性。为克服这一问题,其他更高频测量手段相继被应用。如Zhang等[43]采用热线风速仪逐点测量多旋翼植保无人机悬停状态下的风场分布情况,用于验证其数值模型模拟准确性,实测结果与数值模拟结果误差低于10%。热线风速仪具备1 kHz以上的测量频率,适合于对非定常流场开展瞬时高精度测量,但由于成本较高,一般不采用阵列式布置,仅能通过单点采样获得整体风场中的速度及脉动量平均分布。因此该方案目前还主要用于固定高度的植保无人机悬停风场测量中,保持各项条件不变的状态下改变测点位置,以提供空间平均场测量结果。
针对上述方法各自的局限性,作者团队采用三维超声风速仪阵列开展航空施药风场测量研究[14]。三维超声风速仪测量频率达20 Hz,进行空间阵列式布置后,能够捕捉部分高频涡变化。作者团队分别测量了有人驾驶固定翼飞机尾涡运动耗散过程,以及植保无人机悬停及巡航作业状态下的下洗气流场,为后续开展旋翼下洗风场室内测量及数值模拟奠定了基础,测试场景如图7 所示。

另外,大范围非接触式测量如红外热成像法、激光雷达、近红外开路傅里叶变换方法等相继出现,一定程度上增加了雾滴运动田间实验方式的多样性,提升了雾滴运动过程的直观性理解。例如,张京等[58]采用红外热像仪与无人机联用,研究了无人驾驶直升机航空喷雾参数对药液雾滴沉积效果的影响。通过测试喷雾前、后作物冠层温度变化率反映雾滴在水稻冠层的沉积效果,确定红外热成像技术可以准确反映雾滴在水稻上的沉积规律。Jiao等[59]也运用红外热像仪对固定翼飞机施药雾滴云团在空间中的运动沉积过程进行了记录,成功提取了雾滴云团的沉降过程及影响范围。Gregorio等[60]采用激光雷达扫描喷雾团,获取具有时间和空间分辨率的数据。激光雷达喷雾飘移测量值与水平采样点获得的测量值比较,其决定系数高达0.85以上。激光雷达系统还可用于监测喷雾雾团的演化过程并生成这些雾团的二维图像。Kira等[61]利用近红外开路傅里叶变换方法监测及表征药液雾滴飘移问题,研究发现在采用水敏纸估计药液雾滴粒径分布后,该方法能够在扫描线内获得雾滴载量,同时光谱特征还能用于鉴定农药溶液的有机相。
但上述方法仍存在成本较高、空间分辨率低、受环境复杂背景干扰、空间积分效应难以去除等问题,相对传统采样方法,仍未能大规模应用于航空施药田间实验中。
3.2 室内测量方法
由于田间实验受环境影响因素较大,且实际作业区域大,部分精细化测量手段难以实现,因此,室内测量方法作为田间实验的补充,适用于获得更多非定常流场的验证数据,可验证不同数值模拟方法对复杂旋翼风场模拟效果。目前可用于室内测量植保无人机下洗风场和雾滴运动的方法主要有热线风速仪、激光雷达、激光粒度仪、PIV、相位多普勒测速(Phase Doppler Interferometry,PDI)等。由于田间实验测量方法中已介绍了热线风速仪、激光雷达等测量方法,本节拟重点介绍激光粒度仪、PIV和PDI系统。
3.2.1 激光粒度仪
激光粒度仪基于激光衍射原理(Laser Diffraction),可对各种物料和样品进行粒度检测,并在较短的时间内给出比较详细的粒度分布数据,适用于在室内开展喷雾粒径谱测量工作。
该仪器利用光的衍射现象,即不同粒径颗粒产生的衍射角差异,通过计算探测器上收集到的不同衍射图形的光强分布,给出颗粒的粒度大小和粒度分布。不同大小的颗粒的衍射光强集中在探测器的不同部位,根据在多元探测器上得到的衍射光强的分布,通过颗粒大小和光强分布之间的相关公式计算得到颗粒的粒度分布。其典型仪器系统及测量原理见图9 。
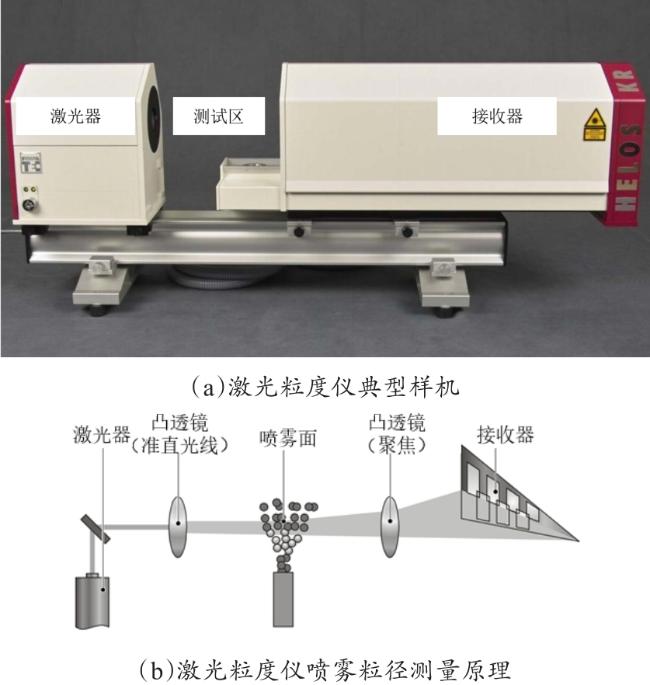
激光粒度仪雾滴粒径测量范围广,可达0.1~3500 μm,扫描频率可达2000 Hz,适用于对高密度雾团进行快速扫描检测。但其功能单一,只能测量雾滴粒径谱,且只能对激光路径上的全部雾滴积分测量,无法获得雾滴粒径三维空间分布的问题。
3.2.2 PIV系统
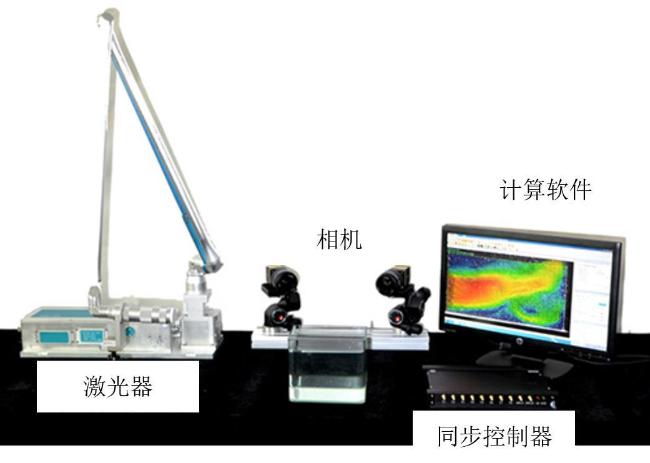
PIV系统包括激光器、片光源成型器、相机、同步器,及粒子图像测速软件等,基于激光平面粒子成像,通过对粒子图像时间序列进行相关计算,从而获得流动瞬时速度场,其典型仪器系统如图10 所示。
采用高速激光器及高速互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)相机的时间解析PIV技术,是目前唯一能够获得无人机下洗风场瞬时流动结构的机理性研究手段。在无人机下洗风场测量中,能够提供高时空精度的流场信息,实现翼尖涡运动及耗散的全过程准确测量,对评估模型对翼尖涡的模拟准确度起决定性作用,如图11 所示。

目前该领域国际领先的研究机构包括德国德国宇航中心(Deutsches Zentrum für Luftund Raumfahrt,DLR)、美国马里兰大学(University of Maryland)以及新加坡国立大学(National University of Singapore)等。其中德国DLR的Raffel是PIV技术发展的主要贡献者,领导了欧洲直升机实验测试项目,其团队运用PIV技术对旋翼翼面、机身附近流场进行了细致测量,主要用于分析不同流态下旋翼翼面效率和受力等问题,较少涉及旋翼下洗气流和周边气流的研究[67-69]。马里兰大学的Leishman团队在旋翼风场测量方面具有多年研究经验,综合运用数值模拟、流动显示技术、高速PIV测量技术等,对单旋翼下洗风场的精细结构发展规律进行了深入研究。但其局限于室内实验条件,将研究重点放在微型旋翼研究上,其研究方法可以借鉴,但研究成果难以直接复制到植保无人机作业中[70-72]。新加坡国立大学的Nathan则运用动壁面和高速PIV技术研究了旋翼在不同前飞速度下的风场演化过程,该实验考虑了前飞状态下旋翼与地面的相对运动对下洗气流结构演化的影响,但仍然局限于室内实验的模型尺度限制[73]。上述研究者已在无人机非定常旋转流场的测量方面开展了大量基础研究工作,但受室内实验条件限制,尚未涉及包含无人机机体的大范围流场测量研究。针对上述情况,作者团队率先针对AF25B和大疆MG1P等植保无人机开展相关室内缩比模型PIV瞬时流场测量研究,获得了大量旋翼翼尖涡发展耗散过程、典型涡结构、平均速度场及流线图等结果,并与团队先期进行的田间作业风场测试结果和开发的该型无人机数值模拟结果分别进行对照,构建了从田间实验到数值模拟的联接桥梁[74,75]。
3.2.3 PDI系统
PIV系统主要针对植保无人机旋翼下洗风场发展演化过程进行研究,而对植保无人机施药药液初始运动过程则主要依靠PDI系统进行研究。由于植保无人机施药过程距离冠层近,初始喷雾雾滴速度分布对沉积分布的影响不可忽略,传统用于雾滴粒径测量的激光粒度仪等装备无法满足需求。PDI技术运用二极管泵浦固体激光器构成的光学系统,采用激光相位多普勒效应,可同时测量通过激光焦点的雾滴粒径及速度。其粒径测量范围为0.3~7000 µm,速度测量范围为-100~300 m/s,激光相位多普勒测速仪见图12 。

作者团队[46]针对上述研究现状,基于PDI测试平台测量了植保无人机常用平面扇形喷头产生的初始雾滴粒径及速度分布,结合数值模型分析了其在旋翼风场作用下的粒径及速度空间分布变化情况,为实现雾滴运动沉积飘移预测提供了初始喷雾参数支撑。
4 综合分析
目前无粘模型、计算流体力学模型(有限体积法及有限差分法)及格子玻尔兹曼模型在模拟植保无人机施药过程中均有应用,且具备各自的优势、缺陷及适用范围,各模型适用性、复杂度等优缺点比较见列表2 。
表2 各数值模型针对植保无人机施药模拟的优缺点比较Table 2 Comparison of advantages and disadvantages of numerical models for plant protection UAV spraying |
| 模型 | 冠层适用性 | 环境适用性 | 模型适用性 | 湍流适用性 | 计算量 | 操作难度 | 涡模拟精度 |
|---|---|---|---|---|---|---|---|
| 无粘模型 | 低 | 中 | 中 | 低 | 低 | 低 | 中 |
| 有限体积法 | 中 | 高 | 中 | 高 | 高 | 中 | 中 |
| 有限差分法 | 中 | 高 | 低 | 高 | 极高 | 高 | 高 |
| 格子玻尔 兹曼法 | 高 | 低 | 高 | 中 | 高 | 低 | 较高 |
无粘模型模拟植保无人机施药过程拥有计算资源消耗低,对近场范围翼尖涡发展模拟准确度较好,远场有人机施药雾滴飘移模拟准确性经过大量验证,适用复杂条件等优势。其面临的主要问题是涡元法中翼尖涡结构不耗散的特性在远场不符合实际情况,目前暂时无法处理大空间范围的模拟问题。另外涡元法采用的三维模拟和二维雾滴远场飘移模型的结合目前仍存在衔接难点,尚无相关文献验证其结合效果。二维雾滴飘移模型中的简化冠层模型也无法用于涡元法三维模型中,进一步制约了无粘模型在模拟植保无人机在包含冠层影响的实际作业条件下的模拟能力。
计算流体力学模型中,有限体积法基础完备,适应范围广,可扩展性强,是主流商用软件的首选方法,适合对复杂气象、地形条件下的植保无人机作业引起的风场变化和雾滴远场飘移影响进行模拟。其主要面临格式精度低易造成人工耗散、非结构网格条件下的网格自适应质量难以保证、大范围三维模拟计算量过大等问题。由于有限体积法格式精度较低,如果采用正常计算量且不加入自适应网格,会出现翼尖涡耗散速度远快于实际情况的问题,从而影响风场及雾滴运动模拟准确度。在目前与植保无人机相关的模拟研究中,该现象普遍存在。而要准确模拟翼尖涡运动耗散过程,需运用更多的自适应网格来细化翼尖涡发展区域,从而急剧增加模拟计算量。在模拟大范围雾滴飘移过程时,计算量消耗问题依然是该方法的瓶颈。有限差分法可轻易构造高精格式,适用于简单外形模型产生的精细风场结构模拟,目前主要应用于基础研究领域,工程应用较少。其在解决复杂外形的结构化网格构建方面依然存在困难,尤其是面对无人机复杂结构外形及冠层复杂结构时。这进一步限制了该方法在植保无人机风场与冠层作用模拟方面的应用。
基于LBM的数值模型具备四阶模拟精度、自适应网格及网格自动生成功能,适合于快速对复杂外形植保无人机及冠层作用下的风场分布及雾滴运动进行模拟。其主要问题是固有立方体网格在需要进行复杂外形边界层加密时网格数急剧上升。为兼顾计算量适当降低边界层网格数,则会影响模型模拟精度,尤其会对植保无人机旋翼造成的下洗速度值产生较大影响。另外该模型在雾滴运动模拟方面仍基于初级的受力模型,尚未涉及环境温湿度对雾滴蒸发的影响,目前仍无法模拟复杂环境条件下的植保无人机施药过程。
在数值模型验证方法方面,目前田间实验(超声/风杯风速仪,水敏纸及聚乙烯卡片,荧光纸带,非接触测量方法)及室内实验(PIV,PDI)等验证方法在验证植保无人机施药数值模型模拟准确性过程中均有应用,且具备各自的优势、缺陷及适用范围,各方法优缺点比较见列表3 。
表 3 各数值模型验证方法的优缺点比较Table 3 Comparison of advantages and disadvantages of verification methods for numerical model |
| 模型验证方法 | 风速 | 雾滴速度/位置 | 雾滴粒径 | 时间分辨率 | 空间分辨率 | 场地适应性 | 操作难度 |
|---|---|---|---|---|---|---|---|
| 超声风速仪 | √ | —— | —— | 高 | 低 | 高 | 中 |
| 风杯式风速仪 | √ | —— | —— | 低 | 低 | 高 | 低 |
| 水敏纸及卡片 | —— | —— | √ | —— | 中 | 高 | 低 |
| 荧光纸带 | —— | —— | √ | —— | 高 | 高 | 中 |
| 热线风速仪 | √ | —— | —— | 高 | 低 | 中 | 高 |
| 红外热成像 | —— | √ | —— | 中 | 中 | 高 | 中 |
| 激光雷达 | —— | √ | —— | 高 | 中 | 高 | 中 |
| 近红外开路傅里叶 | —— | √ | —— | 中 | 中 | 高 | 中 |
| 激光粒度仪 | —— | —— | √ | 中 | 中 | 中 | 中 |
| PIV | √ | √ | √ | 高 | 高 | 低 | 高 |
| PDI | —— | √ | √ | 高 | 中 | 低 | 高 |
超声风速仪及风杯式风速仪是测量植保无人机田间作业风场最重要的手段,可用于验证数值模拟风场速度准确性。超声风速仪具有高测量频率,但价格昂贵,体积较大且为单点式测量,使用普及性较低。风杯式风速仪体积较小,成本低,适合大范围布置,但测量响应频率很低,无法处理风场波动幅度较大的情况。
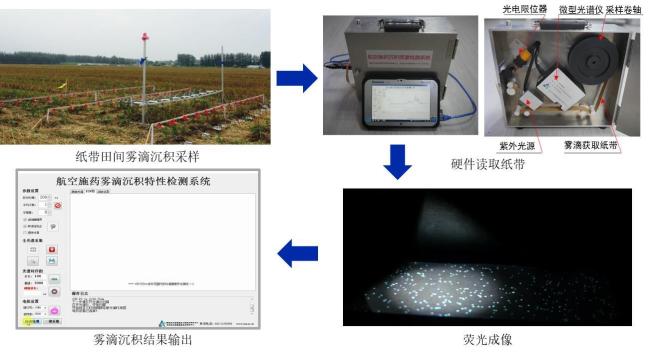
水敏纸、聚乙烯卡片及荧光纸带主要用于测量植保无人机施药幅宽内药液沉积分布情况,可用于验证数值模型对雾滴地面沉积分布预测准确性。其中水敏纸及聚乙烯卡片采用离散式采样布置方式,其采样空间分辨率受限于布点密度,尤其是对植保无人机作业风场这一非定常流场导致的空间分布波动极大的雾滴沉积情况难以真实反映。荧光纸带这种连续采样方式弥补了上述不足,极大提升了雾滴沉积采样空间分辨率,具有较好的应用前景。
大范围非接触式测量如红外热成像法,激光雷达,近红外开路傅里叶变换方法等能够在不干扰被测对象的前提下提供具备时间、空间分辨率的测量结果,提升了航空施药雾滴运动过程的直观性理解。但上述方法仍存在成本较高、空间分辨率低、受环境复杂背景干扰、空间积分效应难以去除等问题,相对传统采样方法,仍未能大规模应用于航空施药田间实验中。
激光粒度仪是各喷雾测量实验室的标准配置,具有测量简便快速的优势。但其功能单一,只能测量激光路径上所有雾滴粒径的平均分布,无法完全满足室内实验的多样化需求。而室内PIV/PDI实验主要作为田间实验的补充,可对难以开展田间测量的植保无人机瞬时下洗风场,喷雾粒径及速度分布等信息进行测量,和田间实验结果一起共同为植保无人机施药数值模型提供验证信息。其中PIV因其具备高时空分辨率,以及基于图像的处理方法,能够对风场及雾滴速度、粒径等信息进行测量,但其对操作要求较高,环境适应性不强。PDI可对单点进行速度和粒径扫描测量,其面临的主要问题是时空分辨率不能兼顾,一般用于对喷头初始喷雾特性进行测量,为数值模型提供喷雾初始条件。
5 展 望
随着研究的不断推进,关于植保无人机施药雾滴沉积飘移研究的各类模拟方法未来将继续改进优化。上述三种模拟方法将根据自身特性,适应不同的研究需求。例如一般工程应用中要求快速运算,因此仍以无粘模型为主;涉及流动细节分析和喷施优化的研究则越来越多采用格子玻尔兹曼法;对于复杂气象条件、基础性流动结构及两相流的研究,计算流体力学模型依然是最佳选择。
无粘模型中,近场三维模拟与二维远场雾滴飘移模拟两种方法间的接口将继续优化,最终形成统一的植保无人机快速模拟方案,同时进一步发挥该方法的计算速度优势,向基于植保无人机飞行实测数据的施药雾滴沉积飘移实时模拟演进。该模型可能会成为植保无人机作业地面站的标准配置,能够根据作业及环境参数实时预测植保无人机施药作业过程中的雾滴潜在飘移区,从而有针对性地重新规划路线或变更设置作业条件。
计算流体力学模型中,有限体积法在自适应网格及并行算法的支持下,其人工耗散率高,计算开销大的问题能获得一定的缓解。在今后依然是模拟复杂气象、作业条件下植保无人机风场及雾滴运动过程并获取精确结果的最佳手段。该方法适合于针对植保无人机机型、翼型等细微结构调整带来的气动特性和风场分布变化进行机理性、基础性研究。依靠雾滴蒸发、复杂湍流,及多种自定义函数功能,本方法还适合对复杂气象、地形条件下的植保无人机作业引起的风场变化和雾滴远场飘移影响进行模拟。有限差分法未来将继续发挥其模拟精度优势,在基础研究领域对特定机型产生的尾涡结构进行精细化模拟,与室内实验结果互为补充,为其他数值模型提供更为精确的尾涡运动耗散过程对照,帮助验证和提升其他模型模拟准确度。
基于LBM的数值模型在对植保无人机作业风场模拟、雾滴运动及飘移过程模拟施药参数、药械结构、喷头选择优化等方面都具有不可替代的作用,适合于快速对复杂外形植保无人机及冠层作用下的风场分布及雾滴运动进行模拟。该模型未来需要进一步优化其壁湍流模型以克服粗网格在壁面附近造成的模拟精度损失,平衡计算量与计算精度的关系。同时需要进一步加强雾滴蒸发、碰撞、破碎模型及环境温湿度模型。
数值模型验证方法方面,田间实验将继续保持特性,并弥补受环境影响较大、时空分辨率不高的问题。主要包括:(1)风场测量环节发展廉价、小型化三维超声风速仪及热线风速仪等高时间分辨率测量方法,并缩小测点间隔,增加测点数量以弥补空间分辨率不足;(2)雾滴沉积检测环节发展自动化荧光纸带检测等连续性采样方法,提升空间分辨率;(3)环境背景布置高频风场测量设备,同步扣除背景噪音以抵消环境风场变化对测量结果造成的随机性影响;(4)雾滴运动/位置测定主要发展非接触式测量手段,如红外热成像、激光雷达、近红外开路傅里叶方法等,着力提高其时空分辨率及抗环境背景干扰能力。
室内实验除传统激光粒度仪测量方式外,将以PIV和PDI等高频测量手段为基础,一方面继续提升系统自动化及智能化水平,降低操作难度和布置要求,提升室内测量效率。一方面继续拓展应用的适用范围,例如积极拓展室外大范围PIV风场及雾滴测量技术、便携式PDI喷雾实时测量系统等,实现室内外测量结果的自然衔接,为数值建模提供更全面的验证信息支持。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}