



1 引 言
近年来,众多研究者对小型升降式辅助作业平台进行了设计与研究,解决了水果收获时需要搭设扶梯的问题,但仅能辅助人工分层采摘不同高度的果实,无法实现对采收果实的输送和装箱功能[11-13]。高杨等[14]以小型履带作业平台为基础研发的采摘机器人,通过执行器完成对不同水果的采摘以及储存,但复杂冠层条件下对水果的识别难度较大、整体工作效率较低。杨贞等[15]设计了一种“双侧、三高度、六工位”牵引式采摘平台,实现了苹果从采摘工位到果箱的装箱传送,但牵引式结构导致工作转向半径大,同时需要额外动力牵引。范晓文等[16]设计了一款轮式多工位采摘平台,实现了果实的收集与装箱,但果箱为后置式结构,无法实现果园行间的连续换箱作业。
为解决传统轮式底盘通过性差以及采收作业过程中水果自动装箱效率低、损伤率大的问题,基于自走式履带底盘结构,本研究研发了一种具备扩展作业平台、前后通畅式果箱连续作业装卸系统以及水果自动输送及装箱装置的自走式果园多工位收获装备,能够满足现代化宽行密植种植模式下辅助人工采收作业需求,并实现果实的高效收获以及低损均匀装箱。
2 整机结构和工作原理
2.1 整机结构方案设计
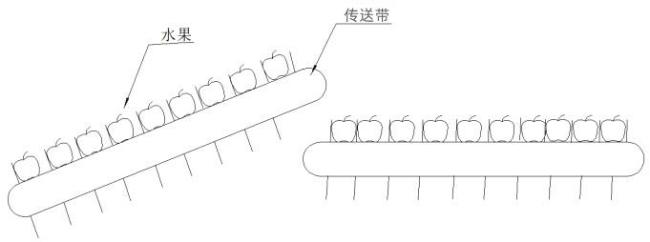
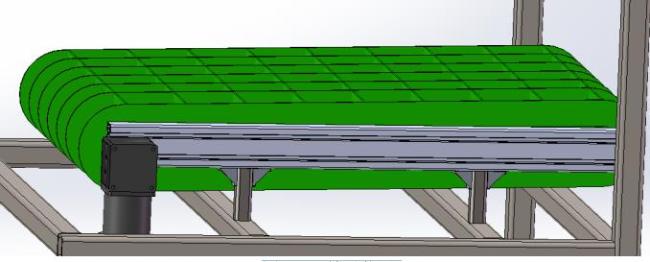
考虑到果实输送的低损伤率和均布性能,对果实收集和装箱方案进行设计。可供参考的果实收集设备有传送带式、气吸式以及人工放置式三种。传送带式主要依靠传送带将采摘后的果实汇集到装箱系统,工作过程平稳且损伤率低,并且工作的流畅性和持续性较好(图1 );气吸式是利用管道端口的正负压差将果实吸入管道实现输送,但此过程中果实损伤率较高且能耗较大;人工放置式即人工采摘后放置于果箱中,这种方式需要高人工参与度,且效率低下,难以保证低损伤率。综上所述,果实收集时选择传送带式为最佳。
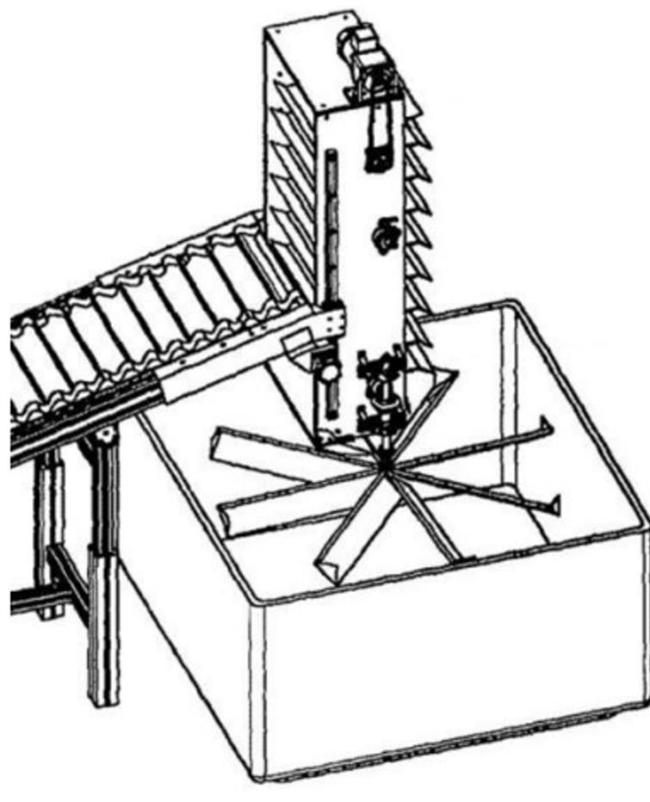
果实装箱工艺主要有果箱固定式和果箱旋转式两种,二者主要区别在于输送过程中对果实的均布方式不同。果箱固定式装箱通过固定果箱,旋转果箱上方均布器来控制果实均匀落入箱内,均布器叶片采用软质材料以减少果实损伤;果箱旋转式装箱采用毛刷筒降低果实运输损伤,然后以果箱的旋转进行果实均布。综合考虑认为,果箱旋转的均布方式能耗较大,而且结合本研究机器的履带底盘和载人平台结构,不再适合添加果箱的旋转装置,因此本研究选用果箱固定式装箱工艺(图2 )。
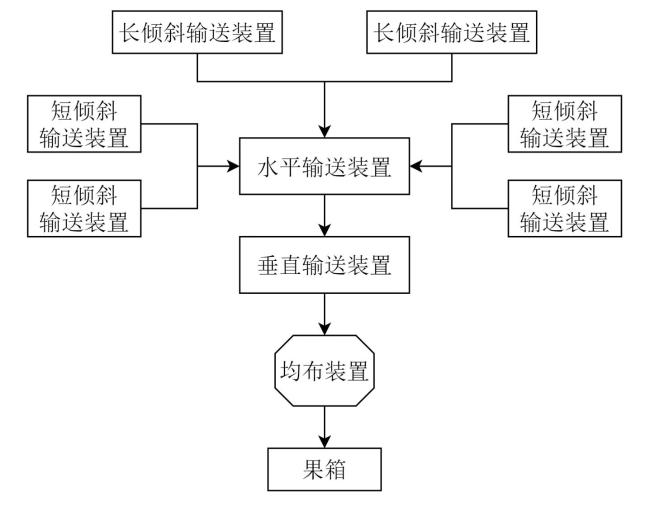
考虑到机器行走时,平台上部作业人员灵活度没有地面作业人员高,采收速度较慢,在平台上部两侧各增加一个工位,保证上下层采摘速度一致,提出“两侧、两高度、六工位”的采摘作业模式。设计的整机结构以及果实输送路径如图3 和图4 所示,主要由履带底盘、载人作业平台、果实自动输送系统、果箱装卸机构及果实装箱系统等组成,可一次性完成果实的收集、装箱、换箱等作业。其中,果实自动输送系统由倾斜输送装置、水平输送装置和垂直输送装置组成,用于完成果实的收集;装箱系统由均布装置、垂直升降装置等组成,用于完成果实的智能装箱;果箱装卸系统由果箱前装卸机构、果箱滑轨、果箱后装卸机构组成,用于完成果箱的连续装卸作业。倾斜输送装置包含4条短倾斜输送装置和2条长倾斜输送装置,对应6个采收工位设置在果箱两侧,短倾斜输送装置用于传送作业平台工位采摘的果树中上部果实,长倾斜输送装置用于传送地面工位采摘的果树中下部果实。
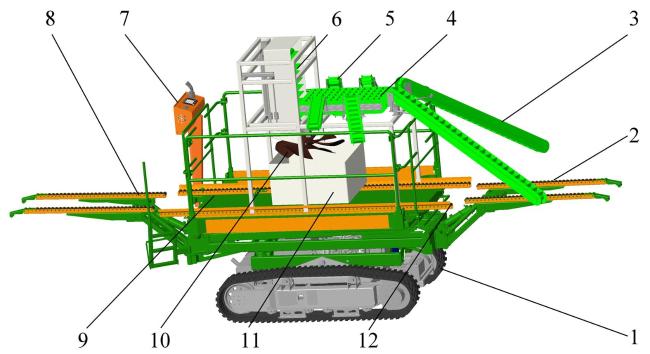
图3 自走式果园多工位收获装备结构示意图 Fig. 3 Structure diagram of self-propelled orchard multi-station harvesting equipment |
自走式果园多工位收获装备参数如表1 所示。
表 1 自走式果园多工位收获装备主要参数Table 1 Main parameters of self-propelled orchard multi-station harvesting equipment |
| 参数 | 设计值 |
|---|---|
| 整机尺寸(长×宽×高)/mm | 4890×2200×3700 |
| 载人作业平台尺寸/mm | 3000×(1500~2700) |
| 载人作业平台离地高度/mm | 1300 |
| 工作速度/(km·h-1) | 0~2 |
| 果箱尺寸/mm | 850×850×850 |
| 配套动力功率/kW | 32.3 |
| 收获装置功率/kW | 1.36 |
| 额定载荷/kg | 1000 |
| 采收滞后率/% | 0 |
| 采收损伤率/% | <10 |
2.2 工作原理
自走式果园多工位收获装备由柴油机提供动力驱动履带底盘行走,同时柴油机配有发电机为载人作业平台上部果实输送与装箱系统提供电力。作业时需配备专职驾驶员1名,采摘作业人员6名。驾驶员负责驾驶以及控制载人作业平台,6名采摘作业人员对应6条倾斜输送装置工位,各倾斜输送装置可水平和俯仰转动至需要的位置,方便工人放置果实。
水果采收作业时,首先由驾驶员将果箱前装卸机构降至与地面接触,将空果箱推至果箱前装卸机构的轨道后,由液压驱动提升果箱前装卸机构至与果箱滑轨对齐,随后将空果箱推至作业平台待装箱工位,并对空果箱进行限位固定。
驾驶员驾驶机器以工作速度前进,6名采摘作业人员负责各自区域对应高度的水果采摘作业,被采摘下的果实由对应倾斜输装置汇集至水平输送装置,再汇集至垂直输送装置上,最后通过均布装置均匀地落入果箱中。每铺满一层果实,均布装置和垂直输送装置上升一定高度,保证均布器叶片与果面保持适当距离以降低碰撞损伤,果实逐层装满。当升降装置上升至与限位开关触碰后,提示果箱已装满,停止水果装箱工作。
装箱完毕后,采摘作业人员示意驾驶员停止行驶,由驾驶员将果箱后装卸机构提升至与果箱滑轨对齐;采摘作业人员解除满果箱限位,并通过果箱滑轨将满果箱推至果箱后装卸机构;驾驶员控制果箱后装卸机构降至地面,当与地面接触后解除果箱限位,满载的果箱自动滑至地面,由后续车辆转运至仓库。随后驾驶员通过果箱前装卸机构从装备前部重新装载并提升另一空果箱至装箱工位,采摘作业人员对空果箱限位后继续作业。
3 关键部件设计及计算
3.1 履带底盘设计
履带底盘系统设计中,接地比压与机器质量、履带接地长度、轨距和履带宽度密切相关,合理的接地比压可以提高机械的通过性能和转向性能,通常设计平均接地比压值p≤0.05 MPa[19, 20]。宽行密植果园果树行间距通常为3~5 m,部分果园果树为起垄栽培模式,设计时应确保履带底盘与果树根部及垄壁保持一定距离,而底盘越宽则整机稳定性越高,结合调研情况确定底盘的最大设计宽度不超过1800 mm。与轮式底盘结构相比,履带底盘自重大,其整机质量达到3000 kg,作业平台主要载荷为7名人员及满箱水果共计1400 kg,底盘参数计算时考虑载荷安全余量,取承载总质量为4600 kg。水果采收作业时速度较慢,通常为1~2 km/h,选取最大行走速度2 km/h作为设计参数,履带各参数计算如公式(1 )~(3 )所示。
其中,b为履带宽度,mm;m为承载总质量,kg;L为履带接地长度,mm;B为轨距,mm;p为接地比压,MPa。据此计算取整后得履带宽度b为350 mm,轨距B为1450 mm,接地长度L为2028 mm,校核平均接地比压p为0.037 MPa,符合设计要求。
底盘行走时,驱动力必须大于或等于各摩擦阻力之和,但也要小于或等于地面对履带的附着力。两侧履带由于速度差异导致状态各不相同,从而导致出现滚动阻力及转动阻力,其中两侧履带无速度差时,底盘系统阻力最小,为两侧履带的滚动阻力;当两侧履带出现速度差时,由于运动不同步导致履带接地面发生位移而形成的转动阻力远大于滚动阻力,必须考虑各种复杂工况下的动力需求,动力选型参数计算如公式(4 )~(6 )所示。
其中,F 1为行走阻力,N;g为重力加速度,取9.8 m/s2;f为滚动阻力系数;P 1为马达最大功率,kW;fmax为最大等效工况滚动阻力系数,取0.69;v为最大车速,m/s;P 2为发动机所需功率,kW;η1为马达机械效率,取0.9;η2为泵容积效率,取0.85。经计算得到马达最大功率为17.2 kW,发动机所需最大功率为22.6 kW。考虑到平台其余油缸动作以及发电机消耗功率,选用额定功率为32.3 kW,额定转速为2600 r/min的洋马4TNV88型发动机可满足参数要求。
3.2 扩展工作平台设计
现代果园果树行距为3~5 m,载人平台初始设计宽度为1500 mm,初始宽度无法适应不同行距果园采收需求,在主作业平台基础上扩展作业平台宽度十分必要。本研究设计的扩展工作平台如图5 所示,由C型钢、导向槽、平台钢板、护栏、导向轴承、支撑轴承以及液压油缸等组成,单侧扩展作业平台宽度为600 mm,两侧扩展作业平台可无级扩展,载人作业展开后宽度可达2700 mm。
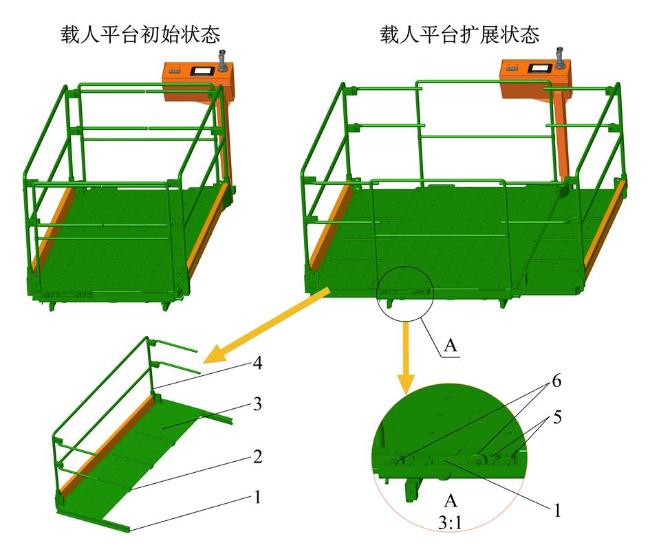
扩展作业平台前后两侧C型钢与主作业平台底部滑槽中的支撑轴承滑动连接,C型钢侧面通过导向轴承限位,选用的C型钢截面尺寸为85 mm×48 mm×6 mm,主作业平台通过液压油缸与扩展作业平台底部铰接并带动扩展作业平台实现伸缩动作,推力F t及液压油缸参数计算如公式(7) 所示。
其中,μ为扩展作业平台与主作业平台之间的摩擦系数,取0.4;m c为扩展作业平台承载重量,kg;m z为扩展作业平台自重,kg;P为液压系统工作压力,MPa;d 1为油缸活塞直径,mm;d 2为油缸推杆直径,mm。油缸设计压力为25 MPa,计算确定油缸活塞直径d 1为40 mm,油缸推杆直径d 2为25 mm。
3.3 果箱装卸机构设计
果箱装卸机构主要由机架、液压油缸、连杆机构、滑轨和限位块等组成,根据安装位置分为前装载机构和后装载机构,其主要功能为从地面装载空果箱提升至作业平台以及卸载装满果实的果箱至地面。如图6 所示,作业时果箱装卸机构通过液压油缸带动连杆机构实现上下运动,限位块设计在滑轨末端,自由状态下限位块凸起,防止果箱滑出,当限位块与地面接触后,凸起自动解除,果箱沿滑轨依靠自身重力滑落至地面。

果箱装卸机构上的导轨可通过液压油缸提升至与作业平台上的双果箱滑轨对齐,形成前后通畅式果箱移动通道。
果箱装卸机构中油缸受力随油缸与机架之间的夹角变化而变化,对装载机构简化后受力分析如图7 所示。
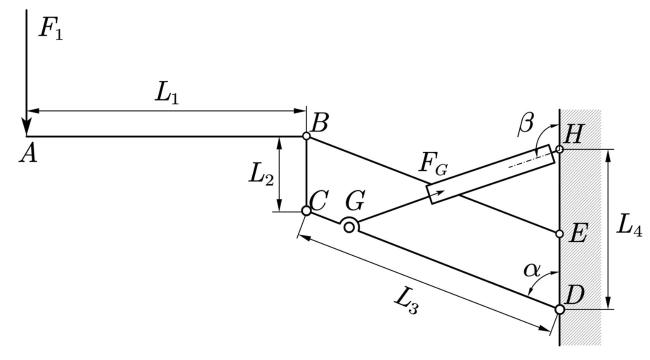
建立力矩平衡方程(8)可得:
其中,F 1为果箱装卸机构载荷,N;L 1为滑轨长度,m;L 2为连杆机构短边长度,m;L 3为连杆机构长边长度,m;L 4为油缸铰接点至连杆机构底部长度,m;F G为油缸拉力,N;α为连杆机构与机架夹角,(°);β为油缸与机架夹角,(°)。
油缸的拉力F G计算方法为公式(9) 。
果箱装卸机构在举升的起始阶段时油缸所受拉力最大,计算得到最大拉力为20.26 kN,据此计算选用活塞直径为80 mm,油缸推杆直径为45 mm,油缸行程为400 mm的双作用油缸。
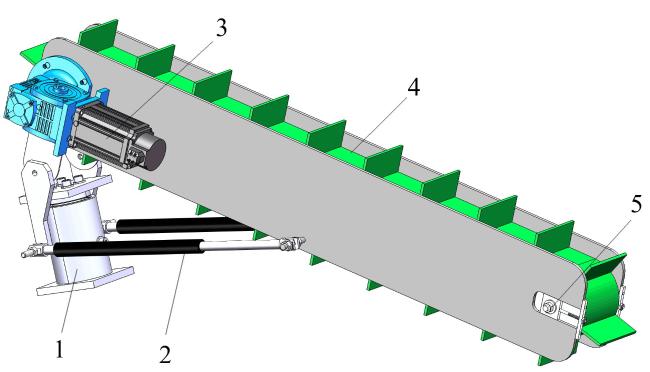
3.4 果实倾斜输送装置设计
如图8 所示,倾斜输送装置主要由输送带、直流电机、水平转动装置、气弹簧等组成。输送带上布置适当间距和高度的挡板,达到果实分离和输送的目的,保证果实不发生大范围滚动甚至掉落。由两根布置在倾斜输送装置两侧的气弹簧实现俯仰运动,通过水平转动装置实现倾斜输送装置的水平摆动,采摘人员推动倾斜输送装置就能够随时调整其至所需要的位置,最大限度提高采摘效率和舒适度。
倾斜输送装置由气弹簧支撑,实现俯仰运动的气弹簧不仅要满足倾斜输送装置的上下转动,而且要能够随时停在预定的位置,其受力分析如图9 所示。
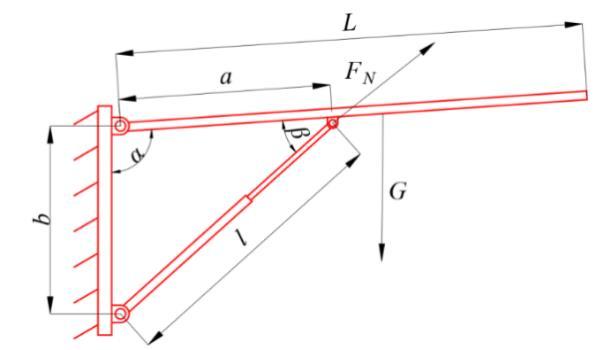
建立力矩平衡方程如公式(10) 。
其中,FN 为气弹簧支持力(FN 1为低位时气弹簧支持力;FN 2为高位时气弹簧支持力),N;G为输送带总重,N;a为气弹簧支点到固定端长度,m;b为固定支座高度,m;lx 为气弹簧长度(l1 为气弹簧原始长度,l2 为气弹簧极限长度),m。
当G=200 N、a=0.45 m、b=0.2 m、L=0.81 m,分析可得气弹簧在最低点l1=0.31 m时受力最小,在最高点l2=0.55 m时受力最大。代入公式(10) 可得,FN 1 =140.2 N,FN 2 =195.3 N,气弹簧受力范围为140.2~195.3 N,在气弹簧自锁范围200 N之内,倾斜输送装置可以实现“随调随定”。
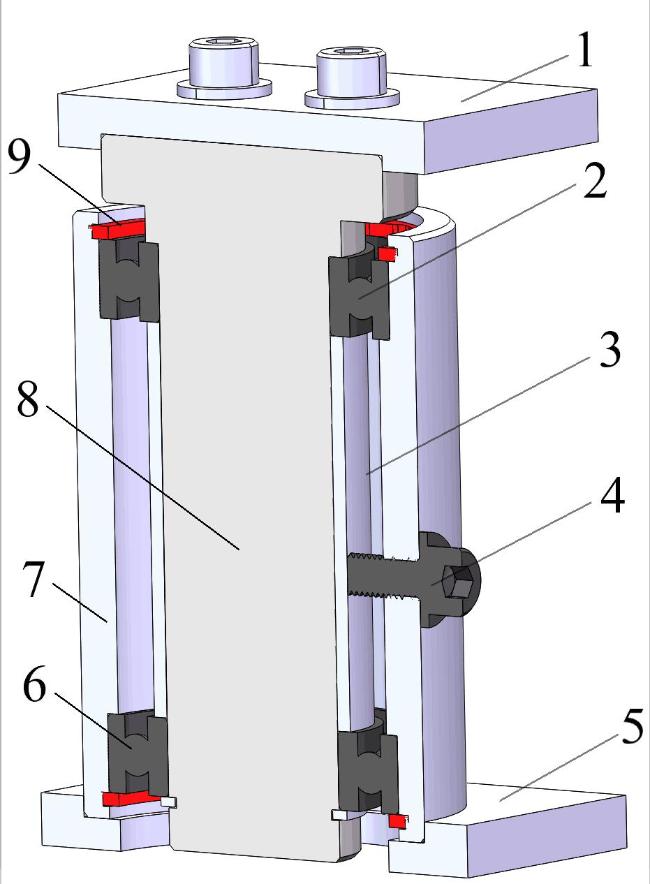
如图10 所示,果实倾斜输送装置中,水平转动装置由转动底座与固定底座构成。固定底座固定在机架上,转动底座通过两个深沟球轴承采用过盈配合与固定底座连接,可以实现底座的旋转。转动底座中间凹槽安装有定向圈,通过调节万向球轴承的螺栓可以控制定向圈和滚珠之间的摩擦力,从而达到定向的目的,实现倾斜输送装置水平方向的随调随定。
3.5 水平及垂直输送装置设计
水平输送装置如图11 所示,其主要作用是将6个倾斜输送装置输送过来的果实汇集并传输至垂直输送装置,由于需要汇集6条倾斜输送装置的果实,所以水平输送带需要有一定的长度和宽度。水平输送装置通过螺栓固定在龙门机架上端,左右两侧与倾斜输送装置相连接。
水平输送带采用的材料是聚氯乙烯。宽度设定为590 mm,两端滚筒中心距为980 mm,滚筒外径为80 mm,挡板高度为50 mm,挡板前后、左右间距为100 mm。水平输送带的输送速度与垂直输送装置以及均布装置的速度之间具有相互关系,均布装置的转速确定为40 r/min,均布装置每转一圈可以承载垂直输送带三个挡板的果实,垂直输送装置与水平输送装置的速度保持一致,速度均为0.2 m/s。
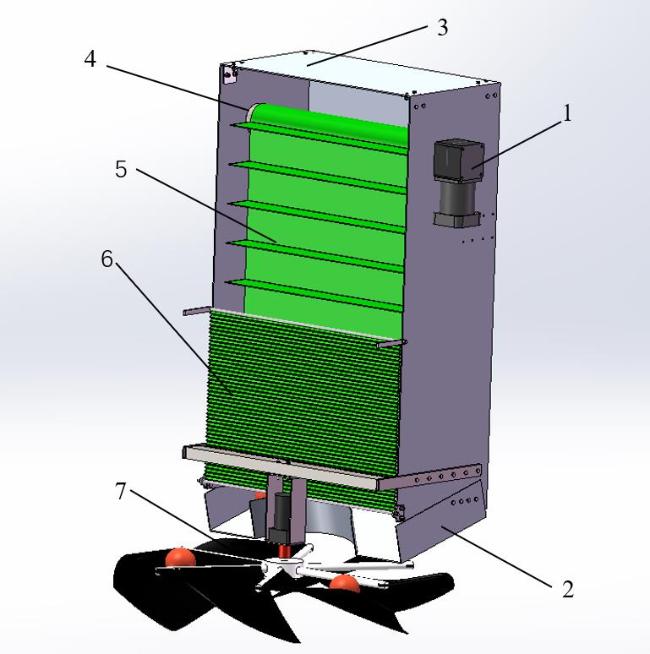
垂直输送装置主要是将水平输送装置汇集的果实输送到均布装置上,如图12 所示,垂直输送装置主要由减速步进电机、外罩、垂直输送带、滚筒、伸缩板、进料滑道组成,其中由垂直输送带、伸缩板和外罩组成一个密闭的空间,防止果实在输送过程中掉落。垂直输送带的宽度定为590 mm,两端滚筒中心距为840 mm,滚筒外径为80 mm,挡板高度80 mm,挡板间隔为100 mm。进料滑道的主要作用是将果实分成两侧进料,可以有效地提高装箱的均匀性,同时还可以在一定程度上减少果实损伤。
3.6 果实均布装置及果面检测系统设计
均布装置用来保证从下料斗落出的果实均匀地落入果箱,并实现果实的逐层装箱,降低果实与果箱、果实与果实间碰撞产生的损伤。
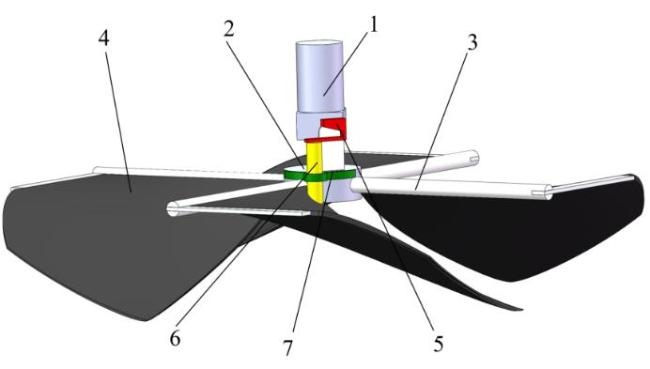
如图13 所示,均布装置主要由电机、轮辐盘、轮辐支撑条、均布叶片、接近开关、橡胶棒、固定圆环等组成。采取上端电机驱动的方式,用联轴器将电机与轮辐盘相连接,沿轮辐盘轴线安装带有均布叶片的轮辐,均布叶片通过轮辐支撑条和轮辐共同固定。均布装置轮辐长为350 mm,轮辐支撑条长为200 mm,宽为20 mm,轮辐盘为4孔,直径为50 mm,均布叶片数为4个,叶片长为400 mm,均布叶片的材料为厚度3 mm的泡棉,具有质地柔软、表面光滑、柔性好的特点。叶片呈内凹喇叭形安装,两两叶片之间的距离大于苹果直径,在避免果实产生碰撞损伤的同时,有利于果实滑滚。工作时,电机带动均布叶片匀速转动,苹果从出料口经叶片内凹滚道滑落至果箱。均布叶片不断旋转,叶片下端在果面上扫过,将产生堆积的苹果扫开、铺平。
果面检测系统由接近开关、橡胶棒、固定圆环组成,随均布装置转动而转动,用于检测果面是否达到升降标准。固定圆环固定在轮辐支撑条上,橡胶棒套设在均布叶片内侧上,并从固定圆环中穿过,以保证当果面高度上升从而使均布叶片逐渐向上抬起的同时推动橡胶棒沿竖直方向运动,触碰到接近开关,实现信号的传递。
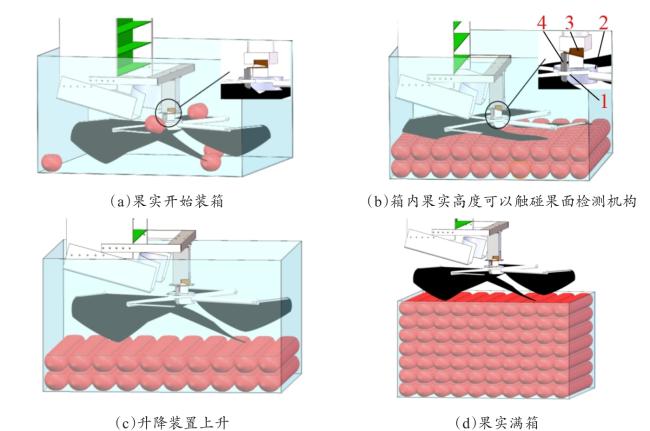
果面检测系统工作时如图14(a) 所示,果实通过下料斗落入到均布装置上,并随均布叶片旋转落入果箱内,均布叶片下面的果实与均布叶片接触并使均布叶片向上抬起,当果箱内果实没达到特定高度时,均布叶片上升的高度不足以使橡胶棒触动接近开关,果实继续装箱;如图14(b) 和14(c) 所示,当箱内果实装到特定高度时,果箱内果实高度足以使均布叶片上的橡胶棒触动接近开关,接近开关检测到信号并控制垂直升降装置带动均布装置上升预定高度,留出装果空间;如图14(d) 所示,当完成果面升降检测后,果实继续装箱,直至果实装满果箱。
4 田间作业性能试验
为验证本研究设计的自走式果园多工位收获装备田间作业性能,于2020年10月在山东省某地开展了苹果收获田间试验。苹果品种为烟台富士,果树单行长度为50 m,平均高度为3.55 m,行距为3.8 m,平均株距为1.0 m。试验现场如图15 所示,试验前驾驶员根据果树行距,将两侧左、右扩展作业平台各展开20 cm。为保证苹果采净率,机具采用慢速档行走,作业速度为1 km/h,六个工人分别站在六个倾斜输送装置工位处,旋转调整倾斜输送装置来适应采摘需求。

4.1 试验指标和方法
本研究提出均布系数法评价果实装箱的均匀性。将果箱按每行每列每层划分为5×5×1个单元网格,分别计算每个网格所含果实数目,按公式(11) 和公式(12) 计算均布系数,以均布系数作为苹果装箱均匀性的指标,均布系数越小,则代表各层之间以及每层中各网格之间苹果数目相差较小,均布效果好。
其中,S n为各层每一行5个单元格的果实装箱均布系数;n为从前到后的行数,n=1~5;a 1、a 2、a 3、a 4、a 5为每一行从左到右每一个单元格中的果实数;b n为各层每一行五个单元格苹果数的均值;S为果实装箱均布系数。
苹果在从倾斜输送装置至果箱装箱过程中,不可避免的会发生挤压和碰撞等不同类型的机械损伤,而碰撞是苹果收获过程中产生机械损伤的主要原因之一。公式(13) 用于计算果实装箱损伤率。
其中,S 损伤率为果实的损伤率,%;S 损为果箱内果实发生表皮、果肉破损的个数,个;S 总为果箱里面果实的总个数,个。
装箱速度以装满一箱的果实个数除以装满一箱果实所需的时间来计算,如公式(14) 所示。
其中,V为装箱速度,个/min;n为装满箱子时的果实个数,个;T为装满箱子所用的时间,min。
根据响应面参数优化得到果实装箱低损最佳性能参数组合为:均布装置转速29.169 r/min,均布装置高度200 mm。以此参数进行3次果实采收装箱试验,工人们采摘果实后放置到倾斜输送装置,然后汇集至水平输送装置及垂直输送装置,最终通过均布装置落入果箱内。随着果实不断落入果箱内部,箱内果实积累到一定高度时,升降装置触碰到上限位开关,工作停止,一次试验结束,进行果箱置换,重复上述过程,继续下一次试验。每次试验后分别按照公式(11 )~(14 )来计算均布系数、果实损伤率和装箱速度,取三次结果的平均值作为试验指标最终测试结果。
4.2 试验结果
表2 苹果采收装箱试验结果Table 2 Test results of fruit harvesting and crating |
| 试验序号 | 采收苹果数量/个 | 损伤苹果数量/个 | 损伤率/% | 均布系数 | 装箱速度/ (个·min-1) |
|---|---|---|---|---|---|
| 1 | 915 | 49 | 5.36 | 1.504 | 76.7 |
| 2 | 789 | 30 | 3.80 | 1.488 | 72.6 |
| 3 | 754 | 32 | 4.24 | 1.432 | 69.4 |
| 均值 | 819.3 | 37 | 4.67 | 1.475 | 72.9 |
5 结 论
针对现代化果园生产作业中遇到的用工量大、水果采收效率低的问题,结合果树矮砧宽行密植模式和农艺要求,本研究设计了一种自走式果园多工位收获装备,通过多级输送装置将人工采摘后的果实自动收集并装箱。同时设计了田间果实收获试验,提出均布系数法衡量果实装箱的均布效果,并结合果实损伤情况以及装箱速度综合评价该装备的收获性能,试验结果表明均布系数、损伤率等指标均满足设计要求。该装备可用于实际的果园采摘工作中,主要结论如下:
(1)根据果树冠层特点,结合“两侧、两高度、六工位”采摘模式,设计了基于履带式底盘的可扩展式工作平台,并对果箱装卸结构、果实倾斜输送装置、果实水平及垂直输送装置、果实均布及果面检测系统等关键零部件进行了结构设计。
(2)田间试验表明,自走式果园多工位收获装备各环节工作部件作业稳定,果实自动收集与装箱速度可同步于六工位人工采收速度,苹果采收损伤率为4.67%,装箱均布系数为1.475,装箱速度为72.9 个/min。
本研究设计的自走式果园多工位收获装备可对人工采收的水果进行收集和装箱,有效降低工人劳动强度,提高生产效率。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}