



1 引 言
激光导航采用LiDAR(Light Detection and Ranging)对果园环境进行实时扫描,通过探测果园中不同果树位置,实现机器人的相对定位。激光具有主动发光、测距精度高等优点,可全天候作业,对环境适应能力强[12]。Santos等[13]依据同时定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术开发了不依赖全球卫星导航系统(Global Navigation Satellite System,GNSS)定位的VineSlam定位与建图方法和专用于葡萄园的路径规划器“AgRobPP”,该方法的建图与路径规划效果良好,可控制机器人执行多种任务。基于3D激光雷达的SLAM技术,可以较全面地探测周围环境信息,增强机器人移动时的安全性,但也增加了计算负担,对计算性能提出了更高的要求。Saike等[14]对3D LiDAR数据进行了2D化处理,实现了温室内的自主导航作业。刘伟洪等[15]则使用3D LiDAR 实现了导航线提取及自主导航,但未对冠层特征进行处理。以上研究采用2D LiDAR 或将3D LiDAR 进行2D化处理以实现自主导航作业,但未获得完整果树特征信息。
上述导航传感器在果园精准变量喷雾中可用于收集果树冠层特征(冠层体积及叶面积指数等)信息,其中LiDAR不仅可用于自主导航作业,还能获取周围果树特征以用于精准变量喷雾作业[16-20],在果园精准变量喷雾方面应用最为广泛[21]。李龙龙等[22]及窦汉杰等[23]采用竖直安装的2D LiDAR获取果树特征信息,分别实现了仿形变量喷雾及自动对靶喷雾(有冠层时喷雾,无冠层时不喷雾是精准变量喷雾技术的一种[23, 24]),达到了减少农药漂失、节省药液的目的。探测果树信息时,LiDAR竖直安装可尽量多地获取果树外貌轮廓特征信息,但机体前进方向为探测盲区无法实现自主导航作业[18]。相比于2D LiDAR,水平安装的3D LiDAR 可以探测周围环境较为完整的信息[16]。
通过以上研究可知,LiDAR可实现全天候信息采集,而3D LiDAR可获取周围环境前后及上下(一定角度)的三维信息。以上研究未能使用单个3D LiDAR实现既能自主导航又能自动对靶喷雾作业。基于上述情况,本研究利用水平安装的3D LiDAR获取果树点云信息并截取合适感兴趣区(Region of Interest,ROI),并对ROI内的点云进行裁剪、滤波、欧式聚类及2D 化等处理,得到果树质心位置。通过随机一致性(Random Sample Consensus,RANSAC)算法,得到机体左右果树行线公式,依据果树行线得到导航线公式,最终控制机体沿导航线行驶。同时通过7个不同ROI中同棵果树的分区冠层有无信息逻辑计算得到上、中、下分区冠层的有无信息,依据冠层有无进行自动对靶喷雾。最后对机器人进行自主导航性能和喷雾性能测试,并进行数据绘制,为果园智能植保机械研究提供参考。
2 材料与方法
2.1 硬件设计
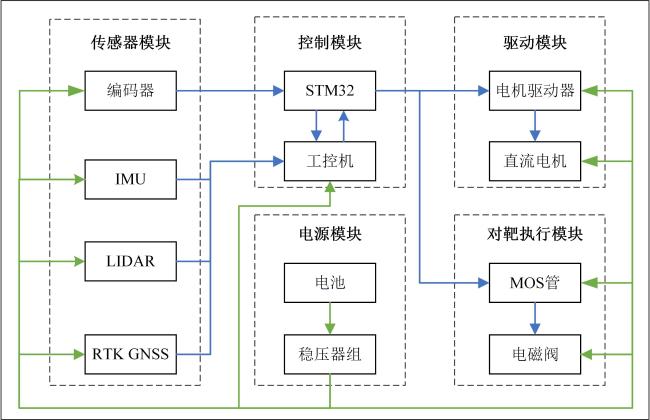
E6B2-CWZ6C型编码器(分辨率为1000 p/r (pulse per ring,脉冲每转))提供速度信息,通过连接轴与机器人主动轮(直径24 cm)共轴连接。机器人在行驶过程中,会发生偏移、倾斜与车轮打滑等现象,而ICM-20948型IMU可提供更为准确的速度和机体状态。IMU自带卡尔曼滤波程序,可提供稳定精确的数据;静态精度0.05 °/s,X、Y方向动态精度0.1 °/s,无磁场干扰时Z轴精度1 °/s,加速度精度0.02 g,陀螺仪精度为0.06 °/s,数据最大输出频率为200 Hz (本研究采用100 Hz)。为验证机器人导航性能,移动轨迹测量系统需具有足够高的精度,采用兼容了世界主流六大卫星定位系统的“P3-DU”RTK GNSS定位系统,其水平定位精度为±1 cm,数据输出频率最大为20 Hz(采用20 Hz),供电范围为DC 9~36 V。
面对每秒32万个点云,中央处理器(Central Processing Unit,CPU)需具有极强算力,同时考虑恶劣的果园作业环境,处理器应具有足够的防护等级[13],选择处理器为 i7 10510U,16 G RAM、1 T 固态硬盘,预装Ubuntu18.04 Linux 操作系统,拥有RS232、以太网、USB及RS485等多种通信接口,供电范围为DC 9~36 V的国产工控机。微控制器控制机体运动及自动对靶喷雾的执行装置,同时采集编码器信息,采用M3S型STM32单片机,芯片为stm32f103zet6,采用cortex-M3协议,144个引脚,flash内存为512 k,主频72 MHz,同时拥有CAN、USB及RS232等多种通信接口。
本研究选用2台800 W的直流无刷伺服电机(SDGA08C11AB,48 V供电)为机器人提供动力,配有1:30的变速箱(60TDF-147050-L2H,中国嘉兴),并配有SDGA-21A型伺服电机驱动器控制电机转速,驱动器通过CAN总线接受来自单片机的角速度控制信号(通信速率为500k bps,Intel编码格式)。机器人在空载时最大行驶速度为1.5 m/s,最大爬坡角度为30°。可通过左右主动轮不同转速实现差速转向并能360°原地转向。对靶执行装置安装在轴流风机出风口两侧,根据冠层信息有无控制不同喷头的开闭;安装了可控制管道通断的2W150-15型电磁阀(24 V供电,中国宁波ADEC公司),使用N沟道场效应MOS(Metal-Oxide-Semiconductor,场效应管)管控制电磁阀供电通断,进而控制电磁阀开启关闭,MOS管由单片机I/O(Input/Output)口输出的高低电平进行控制。
除上述功能模块外,还需电源模块提供电源供给。采用48 V的磷酸铁锂电池(SK-48V100 Ah),电池容量为100 Ah满电电压约为55.2 V。同时,安装有可为不同功能模块(5、12、24及48 V供电)提供稳定电压的稳压器组。
喷雾系统由26 A型柱塞泵提供液路压力,通过压力阀调节整个喷雾系统压力大小,在喷雾作业过程中保持压力稳定。液泵通过170 F汽油机输出轴上三角皮带带动,机体后方的风机通过轴与机体前方的皮带轮连接,该皮带轮同样由汽油机带动。药箱内液体经过泵后进入三路液体分配器,每个分配器分别引出3、4、3液路至喷头,喷头与液路间安装有电磁阀。
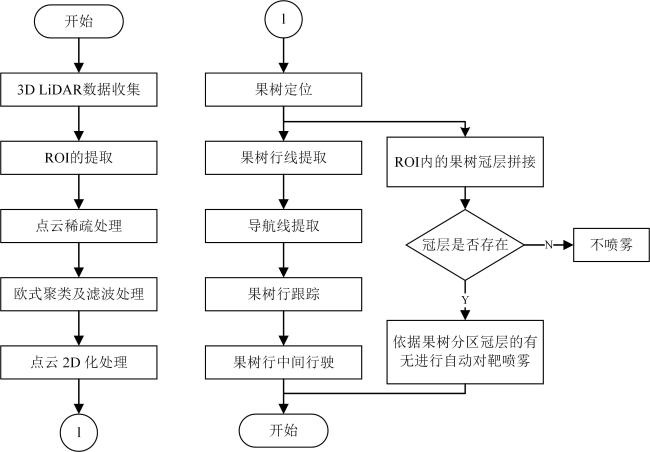
2.2 工作流程
机器人通过图2 流程实现自主导航及自动对靶喷雾,具体实现过程将在随后章节详细介绍。
2.3 导航功能的具体实现过程
2.3.1 坐标确定
本研究的自主导航兼自动对靶喷雾机器人如图3 所示。

由机器人基本信息和运动学理论构建机体下一瞬间世界坐标系下的笛卡尔坐标及偏航角(x, y, θ)如公式(1) 所示:
其中,x w0、y w0为当前笛卡尔坐标;θ w0 为偏航角,(°);r为机器人主动轮半径,12 cm;ω为整个机器人运动的角速度,rad/s;∆t为一帧雷达数据的时间,0.1 s。
2.3.2 ROI的提取
如图4 所示LiDAR水平安装在机器人行驶前方,安装高度1.3 m,最大测距为150 m,理论上可以感知面积约为7 hm2的圆形果园,10 Hz频率下每帧有32,000个点云数据。机器人仅需要机体前后一定范围内的点云信息,过多的信息会造成数据冗余,影响整个系统的实时性,需对冗余信息进行裁剪以提取合适的ROI。

在果园实现机器人定位和自主导航仅需机体两侧果树行前后的数棵果树即可[15],而本研究的ROI不仅给机器人导航提供定位信息,还需获取果树完整的外貌轮廓特征信息。图4 是作业过程中3D LiDAR对一侧果树的探测情况,距LiDAR近的果树仅有局部冠层被探测到,较远的果树能被完全探测到;红线表示激光束,黑线表示LiDAR到树行的垂直距离(果树行距的一半D/2,行距4 m),蓝线表示LiDAR到目标果树的线性距离(d),蓝线、红线及果树(平均高度为H,4.05m)构成直角三角形。该果树是距离LiDAR最近的可探测全部冠层特征信息的果树(机体前方的第n棵果树,株距为R,1.5 m)。其中雷达安装高度为h,由图4 中的几何关系得到公式(2) ,带入数据知n取7。
由此设ROI的X范围为[-3.0 m,10.5 m],Y为[-2.5 m,2.5 m],Z为[-1.9 m,4.8 m],前进方向为世界坐标X轴正方向。使用点云库(Point Cloud Library,PCL)的直通滤波器对x、y、z三个维度进行裁剪,得到ROI的最终范围。直通滤波器简单高效,可在指定维度下遍历点云中的每个点,并判断该点在指定维度上的取值是否在值域内,删除不在范围内的点。
2.3.3 ROI中的果树定位及导航
使用PCL体素化降采样函数将体素尺寸变为(0.05 m,0.05 m,0.05 m),进一步降低点云数量提高运算速率,并将处理后的点云结果进行存储,将机器人在该ROI区域的世界坐标信息存储到同一内存中方便快速计算。
使用PCL的统计滤波函数将噪声去除,采用PCL的欧式聚类算法对点云进行聚类得到点云数据P i,设最小距离阈值为h/3,聚类点的最小和最大数目分别为10和5500个。聚类后将点云投影至XOY面,计算投影后点云质心(Xi,Yi,0)为果树位置。依据IMU、编码器、LiDAR及果树位置,当机器人行驶到不同行果树中间位置时更新一次ROI。树行拟合采用RANSAC算法,导航线获取及导航跟踪算法与文献[15]相同,最终传递给下位机具体的角速度大小。
2.4 软件系统的编写与设计
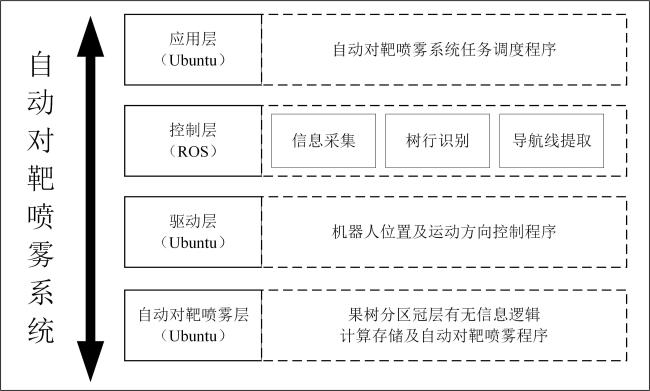
为提高开发效率,减少重复开发,软件系统主要基于时下流行的机器人操作系统(Robot Operating System,ROS)平台行开发。使用 C/C++作为主要开发语言,基于ROS Melodic及Ubuntu18.04进行信息采集处理包、树行识别功能包、导航线提取包、运动控制功能包、分区冠层有无信息逻辑计算包及自动对靶喷雾决策包的开发,如图5 所示。整个系统分为应用层、控制层、驱动层及自动对靶喷雾层,其中最重要的是控制层和自动对靶喷雾层。
2.5 自动对靶喷雾的实现
2.5.1 果树分区冠层有无信息的确定
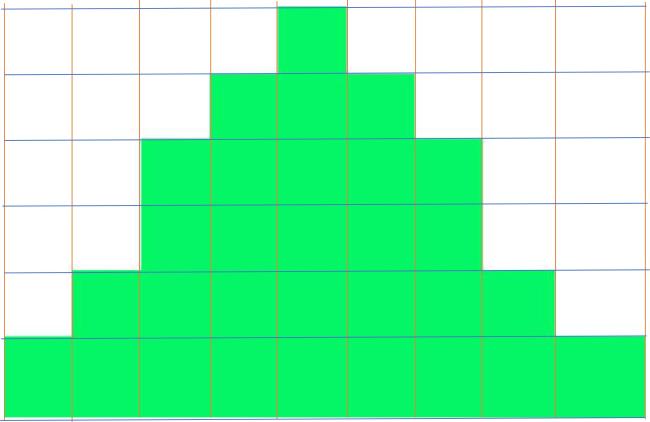
确定果树分区冠层的有无是实现自动喷雾的关键。机器人正常作业过程中,ROI内包含9棵果树,LiDAR距喷头1.5 m,LiDAR从收集数据到最后的自动对靶喷雾需一定的反应时间,所以舍弃位于LiDAR后方4棵果树的点云。使用IMU获取的翻滚及偏移角信息矫正ROI内剩余果树冠层点云,重新得到果树中心坐标位置(树干),将果树冠层到雷达距离值Ds与树干到雷达距离值Dg进行比较,若Ds大于Dg则该处为空隙(无冠层),反之有冠层。同时将ROI(长10.5 m)两侧果树分为长度为30 cm大小的35个小分区,并根据ROI更新频率将果树冠层上下分为7层,如图6 所示。
LiDAR动态扫描机体两侧果树,将机体在果树间行驶的具体距离融合到LiDAR点云信息中,对ROI进行较为精准的分区。机体行驶到不同行果树中间位置时更新ROI并矫正机体位置,以消除IMU及编码器轨迹预测的累计误差。
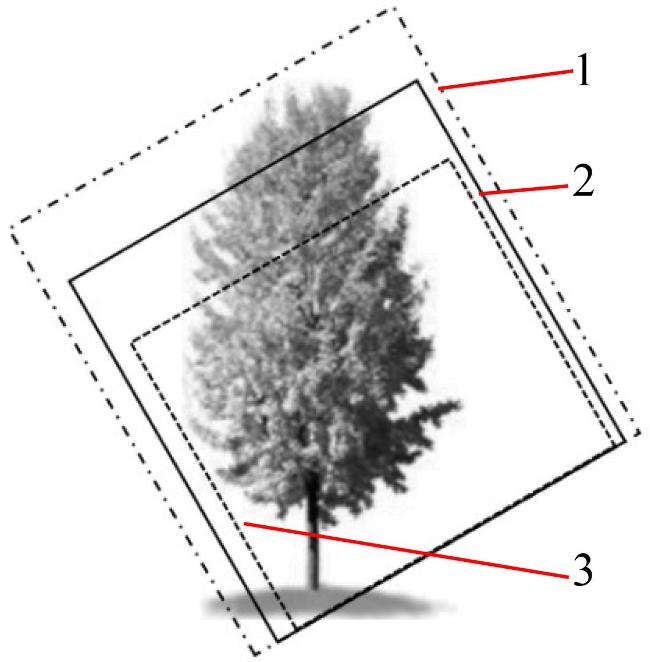
由于水平安装的3D LiDAR垂直视场的局限性,整个ROI内仅完整地得到LiDAR前方第7棵果树的点云。图7 中的点划线框是第一个ROI内可探测到的果树冠层,第一次更新ROI后可探测到实线框内的果树冠层,第二次更新ROI后为虚线框内的果树冠层,依次类推直至第七次更新ROI机体运动到该果树位置。LiDAR距离果树较远时,所测的果树信息极易受到机体状态(倾斜等)的影响,需使用距LiDAR较近黑色框内冠层有无对点划线框内冠层有无进行矫正,然后使用距LiDAR更近的虚线框内有无信息对黑色框内信息进行矫正。具体使用公式(3) 进行逻辑计算实现上述过程。
其中,nk 为第k个ROI区;k是冠层从上到下第k个分区;or为逻辑“或”运算;and为逻辑“与”运算。当k≤2时,取nk (k)的值。
可将果树分为7个倾斜的分区,上两个区域为上层,下两个区域为下层,其余为中层。
2.5.2 喷头及导流板的调整
如图3 所示,共有10个喷嘴,每侧5个,调整喷嘴的位置和方向使其喷向冠层,果树上层对应一个喷嘴,中下层各两个喷嘴。将玻璃绳固定在导流板上,启动风机,观察玻璃绳漂浮方向是否与果树冠层对齐,若不齐,继续调整导流板直至对齐。
2.6 数据绘制
采用OriginPro 2020绘制试验结果图。
3 试验设计
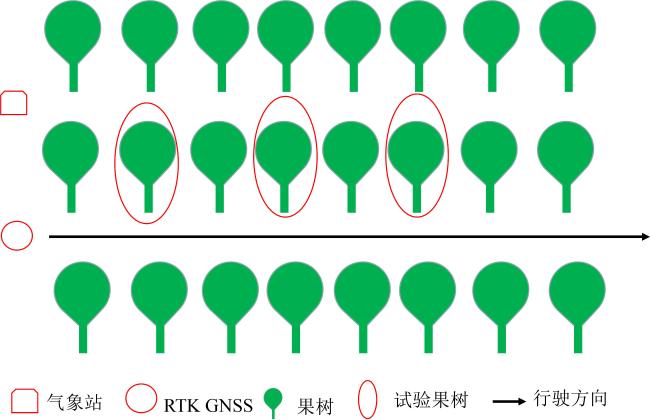
为验证自主导航性能,于2021年10月11日,在北京市平谷区峪口镇西营村现代化佛见喜梨种植园进行了自主导航及喷雾性能验证试验,试验过程中天气晴,温度为17.2~18.5 ℃,风速为0.8~1.3 m/s。图8 是自主导航和喷雾试验示意图,气象站在距基站10 m远的位置用于收集气象条件,RTK GNSS 基站在距试验区域15.5 m远的开阔地带。
3.1 导航试验
试验前用RTK GNSS移动站探测试验区两侧行首及行末果树坐标,得到果树行公式,进而得到导航线公式。试验时将机器人放置在果园地头果树行中间启动电源和汽油机,随后启动自动对靶喷雾程序,沿着图8 中黑色箭头行驶进试验区,试验区距地头10.5 m,长100 m,宽4 m,行驶过试验区2 m后减速至停止,试验重复3次。定义运动轨迹在导航线右侧为横向正偏差,航向角偏向导航线右侧为正。
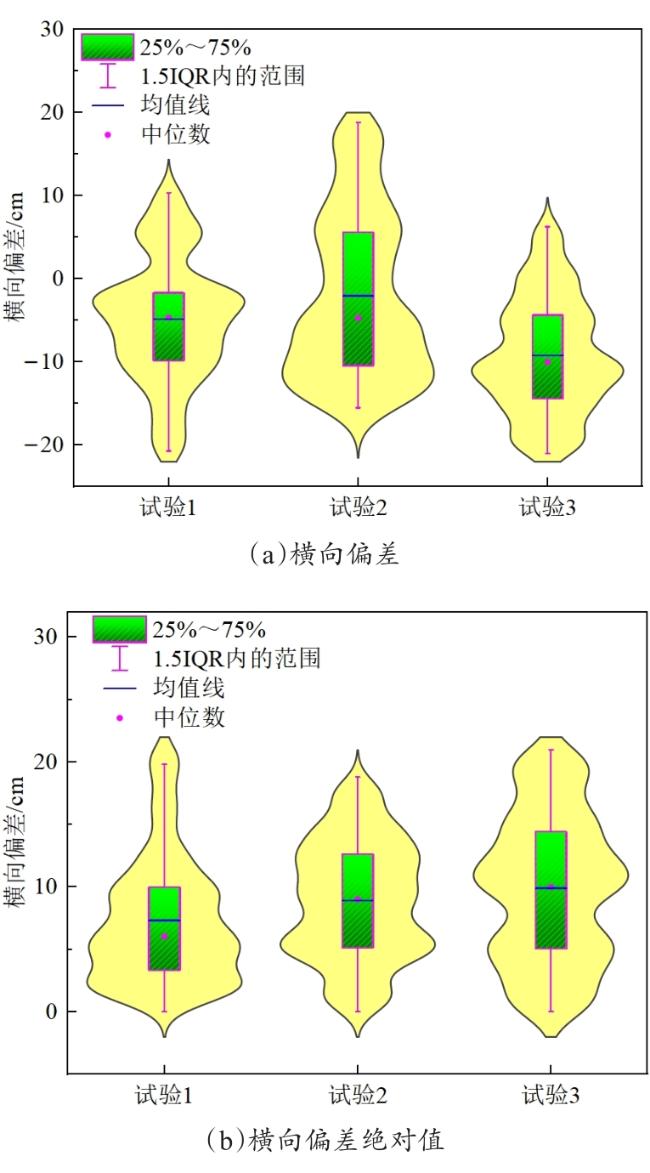
试验时机器人上的RTK GNSS移动站接受机体运动中的位置信号并得到运动轨迹,获取不同时刻下轨迹点到导航线的垂直距离为机器人自主导航时的横向偏差。以导航线为基准线,某个时刻的偏航角可表示为轨迹线与导航线的夹角。
3.2 喷雾对比试验
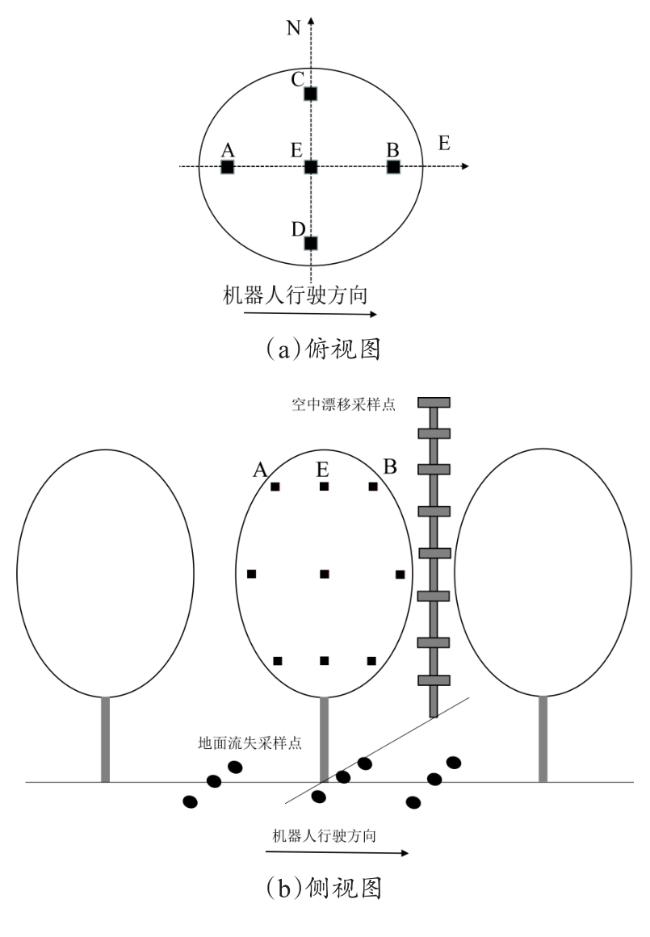
为验证机器人的喷雾性能,如图8 所示选择试验区中的3棵果树作为喷雾性能试验植株。试验果树的布样点如图9 所示,将试验果树分为上、中、下三层,分别距地面3.2 m、2.4 m及1.6 m高(树干平均高度为1.15 m),每层按照东西南北中布置5片直径为7 cm的滤纸(使用双头夹固定)用于收集雾滴,并在试验果树底部及距离底部0.75 m处的左右两侧各布置3片(每片相距0.5 m)直径为7 cm的滤纸用于收集施药过程中的地面流失。同时在距试验树干1.5 m处布置5 m高的竖直立杆,在距地面高为0.2、0.8、1.4……5.0 m(间隔0.6 m)处用双头夹竖直固定400目的长方形金属网(2.5 cm×7.5 cm)共9个用于收集农药漂移,每三个为一组,将金属网分为上、中、下三层。
使用3.0 g/L的柠檬黄溶液作为试验示踪剂,试验前取药箱内的母液放置暗箱内保存。自动对靶喷雾与传统连续(简称传统)喷雾为同一机器,区别在于自动对靶喷雾启动自动对靶喷雾程序,而传统喷雾不启动。每次喷雾试验机具行进100 m,收集样品到6号自封袋中。
其中,d g为归一化单位面积沉积量,μL/cm²;V s为样品沉积量,μL;V z为施药量,L/h²;S为样品面积,cm²。
4 试验结果及分析
4.1 自主导航性能试验结果及分析
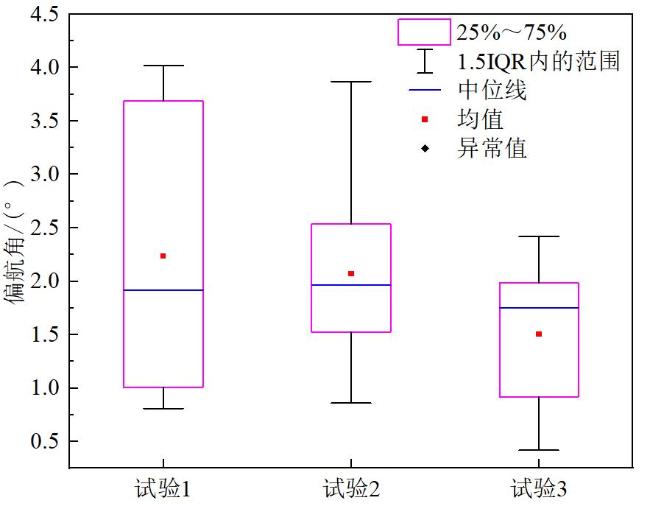
如图11 所示,是3次试验的机器人航向偏角绝对值箱线图,最大值为4.02°。随着试验进行,航向偏角的平均值逐渐减小,可能是随着试验进行,试验区内果园道路被机器人压平,使得原本崎岖的果园地面变得较为平整,机体不易发生倾斜,航向偏角也变得更小、更稳定。由以上试验结果可知,自主导航性能满足基本需求。
4.2 喷雾对比试验结果及分析
使用两种喷雾模式在试验区进行喷雾作业时测量药液用量,传统喷雾和自动对靶喷雾分别消耗药液量为20.24和16.18 L,换算成每公顷施药液量则分别为506和404.5 L/hm²,相比于传统喷雾模式,本研究设计的自动对靶喷雾技术可节省20.06%的农药量。
5 结 论
本研究采用单个3D LiDAR、编码器及IMU实现了果园机器人的自主导航和自动对靶喷雾作业。同时设计了自主导航性能试验及喷雾性能试验,试验结果表明该机器人完全满足果园自主导航和自动对靶喷雾的要求,主要结论如下。
(1)该机器人在自主导航过程中,机器人最大横向偏差为21.8 cm,最大航角为4.02°,完全满足基本的果园自主导航作业需求。
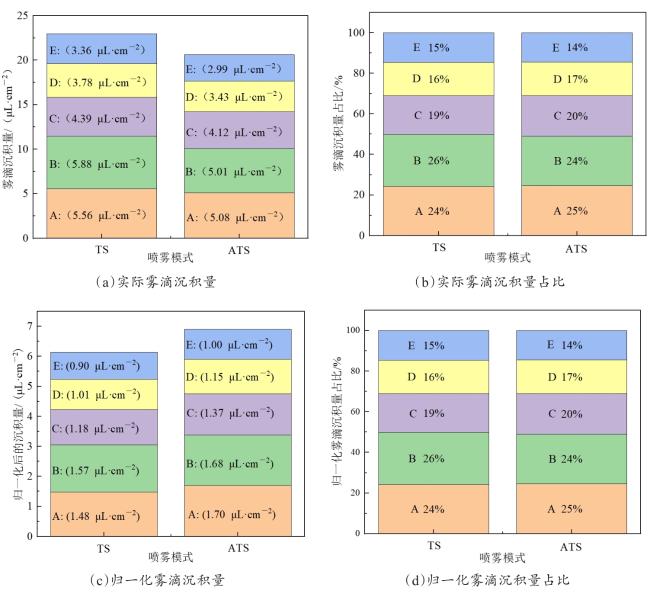
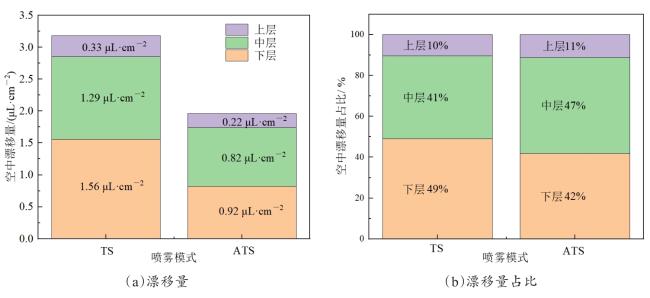
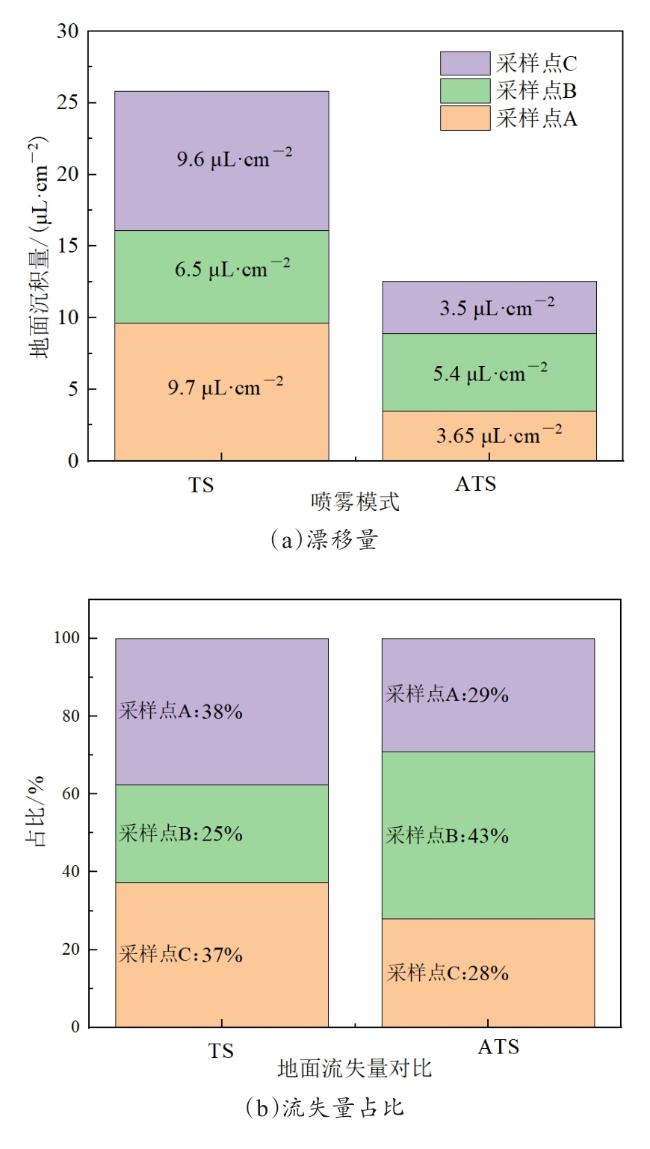
(2)该机器人相比于传统喷雾机,施药液量可减少20.06%,虽然冠层内沉积量减少了12.38%,却提高了喷雾性能且雾滴空中漂移量减少了38.68%,地面流失量减少了51.40%,可降低施药机具对环境的污染。
(3)该机器人与传统喷雾机在农业空中漂移量占比方面无明显差别,而在地面流失占比方面,在试验果树底部地面流失占比最大为43%,试验果树与左右临近果树的中间流失量占比较小分别为29%及28%,而传统喷雾机地面流失量占比情况与之相反。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}