



0 引 言
内蒙古自治区被誉为蒙古马故乡,有着悠久的养马、育马及赛马等文化传统,拥有发展现代马业深厚的文化底蕴和优越的地理环境与气候条件。蒙古马作为内蒙古自治区马匹的优良品种已有上千年的历史,一直是中国的一种重要资源,被农业农村部列为国家级畜禽遗传资源保护名录之一[1]。近年来,内蒙古传统养马业正在逐渐朝着集文化、经济、休闲于一体的新型第三产业发展,对于地方马品种资源有效保护、开展优良选育工作以及充分挖掘优良种质特征已经成为了发展过程中的关键环节[2]。动物育种的中心任务是对数量性状的改良,其中体尺参数在蒙古马育种工作中具有重要地位,能够直接反映其生长发育情况和品种改良效果[3, 4]。体尺参数的不同可能导致运动学特征参数及动力学参数的变化,进而影响马匹运动性能[5]。然而传统的体尺参数测量方法主要通过手动测量完成。该方法不仅效率低、工作量大、自动化程度不高而且易造成马匹的应激反应[6]。而快速、精准、高效的测量方法是突破这一困境的关键手段。
随着现代测试技术不断发展,运用先进技术获取马匹体尺参数并评估其形态特征,以制定育种计划成为当下的主流研究方向[7-9]。Kristjansson等[10]对影响冰岛马的骑行能力的不同形态特征的遗传关系进行评估,结果表明,可通过育种方式改进体型性状以达到提高冰岛马的骑行能力。Pallottino等[11]使用立体视觉系统,通过手动方式测量利比赞马的体尺参数,结果显示测量误差小于3%。Gmel等[12]使用tpsDig2图像分析工具由操作人员手动测量提取弗赖伯格马的各项体尺参数,并采用限制性最大似然模型估计体尺参数的遗传率。Pérez-Ruiz等[13]采用LiDAR(Light Laser Detection and Ranging)传感器记录安达卢西亚马侧面信息并进行三维重建操作,通过手动缩放的方式测量体尺参数,得到人工测量值与三维重建测量值的平均相关系数为0.55。Freitag等[14]研究在美国夸特马左侧放置标记物,并结合ImageJ图像分析软件,通过人工标记的方式测量相应的体尺参数,测量结果平均相对误差小于1.5%。上述研究表明,通过图像处理方法获取体尺参数并用于马匹育种计划的制定是可行的。然而,上述方法主要依赖于人工手动选择测量点,过程复杂且自动化程度低。快速、精准、高效的测量方法已成为推进马匹育种进程的关键手段。
近年来,得益于人体姿态估计领域的进展,国内外学者将基于卷积神经网络的关键点检测方法应用于家畜关键点的实时自动检测研究中,并取得了出色的成果。Li和Teng[15]利用Hourglass模型定位奶牛和山羊躯干分割图像中的测量点位置。Wang等[16]通过构建HRNet(High-Resolution Network)模型实现检测生猪站立时的关节点。Zheng等[17]以活种鸡为试验对象,提出种鸡小腿长周长测量算法(Shank Length and Circumference Measurement, SLCM)。该算法首先利用YOLOv5s(You Only Look Once)模型检测鸡爪和小腿根部区域,其次定位区域中的关键点,进而计算种鸡大腿体尺参数。赵宇亮等[18]利用DeepLabCut工具箱实现生猪背部点云中测量点的检测定位,从而完成对应体尺测量。
上述研究中,家畜体尺测量多是依赖单侧图像数据,胸围等重要三维体尺参数无法获取。此外,关键点检测模型复杂程度较高、泛化性不足,在养殖环境中较难实践应用。针对以上问题,本研究对YOLOv8n-pose模型进行改进,提出一种新的检测模型DSS-YOLO(DCNv2-SA-SIoU-YOLO)关键点检测模型,并结合点云数据处理方法,通过检测蒙古马三维点云中测量点位置,实现体高、体斜长、臀高、胸围和臀围5项体尺参数的自动测量,为高效、精准的蒙古马体尺测量方案提供技术支持和参考依据。
1 材料与方法
1.1 数据集构建
本研究数据分别于2022年10月和2023年4月、9月在内蒙古农业大学马匹养殖技术中心处采集。图像数据采集设备为Azure Kinect深度相机(RGB图分辨率为1 920×1 080像素;深度图分辨率为640×576像素;帧率为30 FPS),采集对象为处于适宜育种阶段的成年蒙古马,年龄(7±1.5)岁,体重(485±50) kg。拍摄处于不同场景、时间段下的行走或站立的单匹蒙古马完整侧视RGB图像视频,共采集50匹蒙古马,每段视频时长为15~25 s,视频保存为*.mp4格式,用于构建训练集和验证集,以完成DSS-YOLO关键点检测模型的训练及性能评估。另外采集30匹蒙古马RGB-D图像用于构建测试集,以完成体尺参数测量任务。
1.1.1 训练集和验证集构建
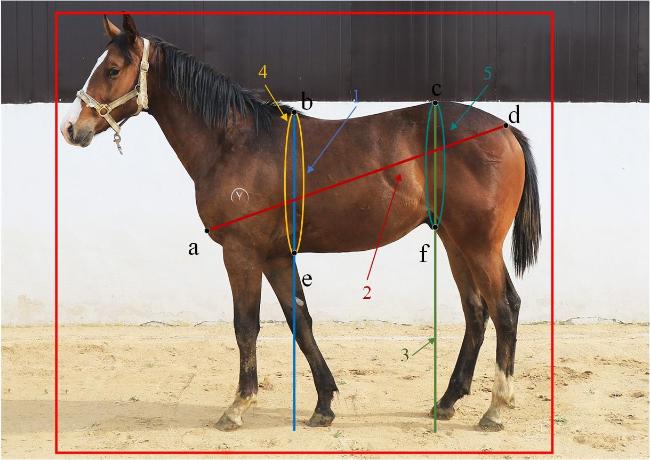
将采集到的50段RGB图像视频设置10帧/s抽取处理,并经人工筛选剔除重复、严重遮挡等质量不佳图像,共获取2 500张高清的蒙古马RGB图像,其中处于运动行走和休息站立状态的马匹图像数量比例为1∶1。为了保证模型的泛化性,并考虑实际图像捕捉过程中存在角度、光线和图像模糊的问题,利用几何变换、亮度调节以及噪声添加对原始数据集进行增强操作,最终生成包含4 000幅图像的蒙古马图像数据集,用于DSS-YOLO模型的训练及性能评估。按照8∶2的比例将标注完成的数据集分为训练集及验证集,其中训练集和验证集分别为3 200张和800张。利用Labelme图像标注软件[19],以蒙古马的各个测量点为参考对数据集进行标注,如图1所示。
1.1.2 测试集构建
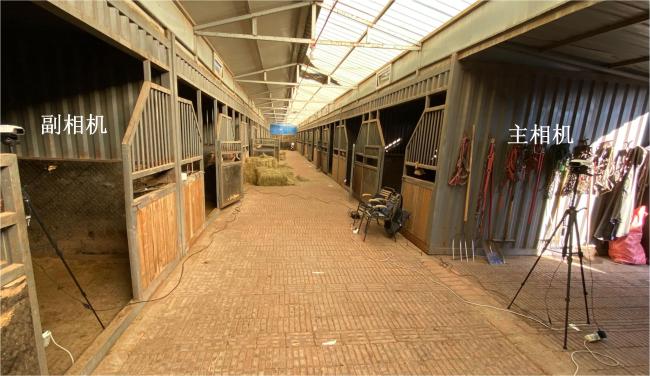
在试验场景中,采集30匹蒙古马用于体尺参数测量任务。由于训练员每日会牵引一定数量的蒙古马往返于马厩和训练场地,为了在不干预养殖场日常工作的前提下进行数据采集,本研究在马厩内通道两侧各安装一台Azure Kinect深度相机,在每匹马往返时经过相机前进行采集,共获得60组RGB-D图像数据。为了减少拍摄过程中相机的抖动现象,利用三角支架对其进行了固定,蒙古马深度信息采集平台布局如图2所示。采集完成后由专业人员利用卷尺、测杖等工具测量30匹马的体高、体斜长、臀高、胸围和臀围5项参数。每项体尺参数共测3次,取均值作为人工测量值。
1.2 总体技术路线图
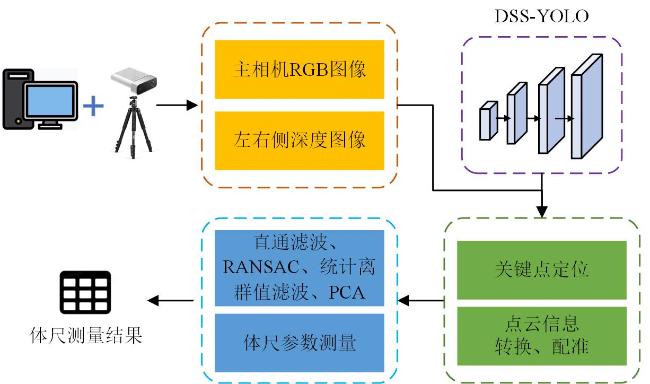
总体技术路线如图3所示,主要由DSS-YOLO关键点检测模型和三维点云处理模块组成。首先,搭建双侧图像采集试验平台,采集蒙古马RGB图像和深度图像。其次,运用DSS-YOLO检测体尺测量的关键点信息并映射至同步采集的深度图中,得到关键点深度信息,并对深度图像进行点云信息转换,以获取蒙古马三维点云数据。最终,通过标定信息完成蒙古马双侧点云的配准和后续处理操作,并根据关键点计算各项所需体尺参数。
1.3 关键点检测模型的改进
YOLOv8是YOLO系列中最新版本,相较于前代版本,该模型拥有最高的检测精度及速度[20]。此外,YOLOv8推出YOLOv8-pose单阶段关键点检测模型,网络结构主要包括输入端、Backbone主干网络、Neck颈部网络以及检测头[21]。其中,YOLOv8n-pose因其较小的计算资源和模型内存需求而具备轻量级特性,故本研究选用YOLOv8n-pose作为基础模型。由于初始YOLOv8n-pose是针对人体关节点检测定位从而实现行为识别任务的预测模型,考虑自制蒙古马关键点数据集的特性,在除关键点数目的变化之外,拟从以下3个方面对YOLOv8n-pose进行改进,以应对识别对象特征的差异,具体改进如下。
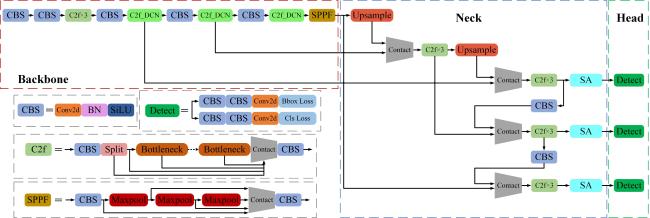
1)在原始YOLOv8n-pose模型的Backbone网络中,将C2f模块与可变形卷积(Deformable Convolution v2, DCNv2)融合,设计C2f_DCN模块结构,以帮助模型能够更好地捕捉在不同姿势下的马匹形状信息。
2)在Neck网络中添加SA洗牌注意力机制(Shuffle Attention, SA)注意力机制模块,通过在通道信息和空间信息两个层面提取特征,能有效提高模型特征表达能力,抑制噪声特征,从而提升检测的准确性。
3)将损失函数优化为考虑角度代价的边界损失函数(SCYLLA-IoU, SIoU),加快模型训练时的收敛速度的同时,增强模型对主要图像区域的关注度,有助于降低关键点检测的错误率。改进后的网络结构如图4所示。
1.3.1 可变形卷积
传统卷积核的感受野有限,无法捕获足够的局部信息,从而影响最终检测结果。DCNv2是Zhu等[22]提出的可变形卷积网络,通过为卷积核添加不同的偏移量,从而允许卷积核在不同的采样位置添加偏移变量,可根据不同数据学习成为不同的卷积核结构,以更好捕捉目标的不规则形状和局部变化。其计算过程如公式(1) 所示。

1.3.2 注意力机制模块
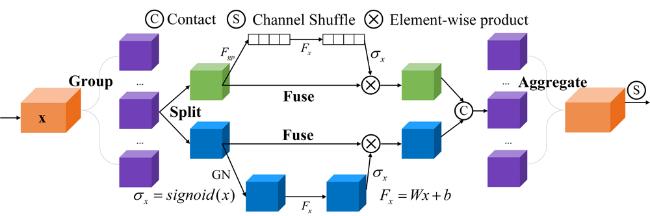
本研究设计在Neck网络中的C2f卷积模块之后添加SA注意力模块。该设计可以提高模型在不同阶段对于特征信息的关注程度,进而提升关键点检测准确度。
1.3.3 损失函数
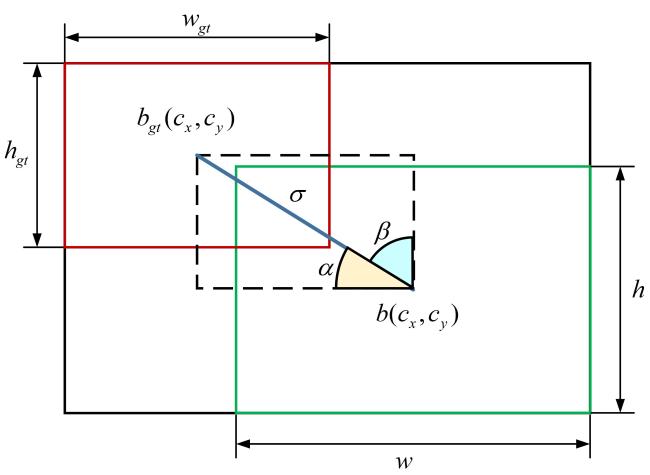
YOLOv8n-pose采用完全交并比损失(Complete IoU Loss, CIoU)和分布式聚焦损失函数(Distribution Focal Loss, DFL)[25]作为边界框损失函数来衡量预测框与真实框之间的重叠程度。但CIoU并没有明确考虑预测框的宽度和高度不能同时按一定比例收敛,从而导致预测框与真实框之间存在着方向上的差异,导致模型训练时的收敛效果较差,进一步导致训练结果不理想。针对该问题,本研究采用SIoU作为边界框损失函数[26]。SIoU考虑预测框与真实框之间的矢量角度、距离、形状及IoU成本,由于本研究着重于中大型目标检测,而且自定义的关键点均处在边界框内,提高边界框准确度有助于降低关键点检测错误率。定义如公式(2) 所示。
LSIoU =1-IoU + (Ω+Δ) / 2, IoU=
式中:Δ为距离成本;Ω为形状成本;b为预测框;bgt 为真实框。角度成本示意图如图7所示, 为真实框中心点与预测框之间的欧式距离。在训练过程中,如果向量夹角α≤π/4,损失函数则将优先沿x轴方向预测,使α最小化,相反则沿着y轴进行预测,使得β最小化。因此,SIoU函数规定了预测框向真实框逼近的方向,避免了训练过程中出现的预测框“徘徊”现象,可进一步加快模型训练中的收敛速度。
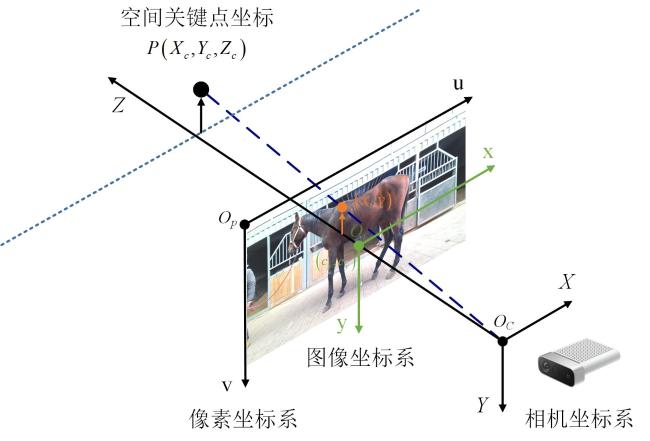
1.4 三维点云转换
式中: 为点像素坐标; 为点图像坐标; 为该点在相机坐标系下的三维坐标; 为图像中心坐标; 为相机焦距。
1.5 蒙古马点云处理与分析
式中: 为主相机坐标系中的一点; 为该点在副坐标系中坐标; R 为空间变换矩阵; 为平移向量。
鉴于Azure Kinect深度相机的高分辨率和广角度测量距离,在获得的点云数据中存在较多噪声和无效点云数据,影响体尺参数测量精度。为确保测量准确性,本研究采取下述点云处理操作。
1)对点云配准结果使用直通滤波,在拍摄通道的3个真实坐标维度(X轴、Y轴、Z轴)中设置阈值,以保留目标蒙古马的点云区域。
2)由于蒙古马图像是在其运动过程中拍摄的,因此利用随机采样一致性(Random Sample Consensus, RANSAC)算法检测地平面点云位置信息并确定其对应的方程,用于体高类参数测量。拟合后的地平面点云如公式(5) 所示。
式中:A、B、C、D为平面方程系数;x、y、z为点云坐标。
3)经直通滤波和RANSAC处理后的点云仍存在着较多噪声数据。为减少噪声点云对胸围和臀围测量精度的影响,利用统计离群值滤波去除存在于背景中及游离在体表周围的离群点云。
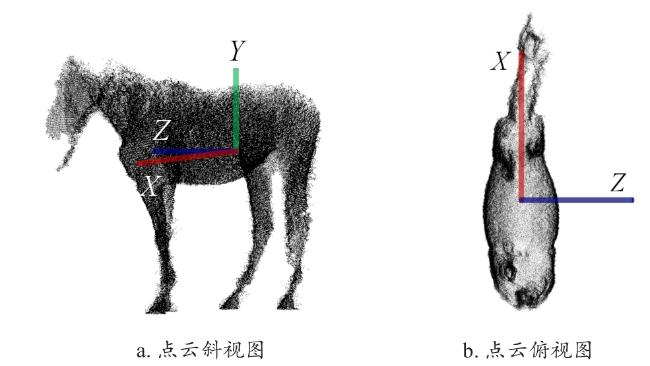
4)采用主成分分析法(Principal Component Analysis, PCA)对蒙古马点云进行体尺参数测量坐标系校正。将点云质心位置设为坐标原点,同时将地平面点云法向量的正方向设为Y轴,体长的正方向设为X轴,并根据右手定则,将体宽方向设为Z轴,以便于后续体斜长测量操作。
1.6 体尺参数测量
1.6.1 体斜长参数计算
为避免空间中点与点之间的倾斜程度影响体斜长参数的测量结果,本研究将点a和点d投影至经坐标系校正后的XOY平面上,进行体斜长参数L的计算,如公式(6) 所示。
式中: 为点a坐标; 为点d坐标。
1.6.2 体高和臀高参数计算
根据RANSAC检测得到的地平面点云信息,计算点b和点c到地面的直线距离即为对应体高、臀高测量值,如公式(7) 所示。
式中:H为体高和臀高的测量值,cm; 为地面点云方程; 为点b和点c的坐标。
1.6.3 胸围和臀围参数计算
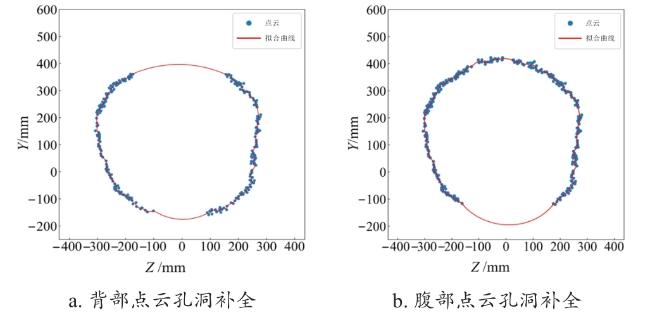
分别利用点b、e和点c、f的相对位置关系对点云模型做切片操作,得到胸围和臀围的轮廓点云信息。由于蒙古马胸围和臀围呈现不规则的几何特征,利用常规的圆形曲线拟合方法计算周长可能导致较大的测量误差。因此,本研究将点云切片中的各点信息转换至极坐标系中,并利用移动最小二乘法对极坐标系中连续的点云数据进行曲线拟合。随后,将拟合完成的曲线再次转换至笛卡尔坐标系下,从而得到胸围和臀围的周长信息。曲线长度S计算如公式(8) 所示。
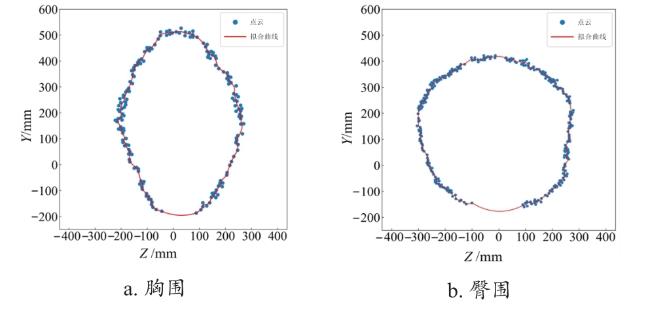
图10 蒙古马胸、臀围点云切片及曲线拟合示意图Fig. 10 Schematic diagram of point cloud slicing and curve fitting of Mongolian horse chest and croup circumference |
2 结果与分析
2.1 试验平台与训练参数设置
初始训练参数设置如下:初始学习率设置为0.01,学习率动量设置为0.937,输入图像大小设置为640×640,批量大小设置为16,权重衰减设置为0.000 5,优化器选择AdamW,训练轮次为150个epoch。试验平台配置参数如表1所示。模型训练过程中采用余弦退火算法动态调节学习率,帮助模型更有效地收敛,如公式(9) 所示。
式中: 为当前学习率; 为最大学习率; 为最小学习率,设置为0; 为当前运行的epoch数; 为总epoch数。
表1 训练试验平台配置参数Table 1 Configuration parameters of the training platform |
| 配置 | 版本 |
|---|---|
| 操作系统 | Ubuntu 20.04 |
| 深度学习框架 | PyTorch 1.11.0 |
| 中央处理器 | Intel Core i7-9700 k |
| 图像处理器 | Nvidia GeForce RTX 2080 ti |
| CUDA | 11.3 |
| CUDNN | 8.2.1 |
2.2 评价指标
2.2.1 关键点检测精度评价指标
通过引入关键点相似度(Object Keypoint Similarity, OKS)计算得出关键点检测平均准确率(Average Precision, AP),其作用类似于目标检测中的IoU,当OKS大于阈值T时,结果被判别为真阳性;OKS小于等于T时,结果被判别为假阳性;OKS等于0时,结果被判别为假阴性。本研究计算在不同T(从0.5~0.95,步长为0.05)下的AP均值作为评价指标,并记为mAP,计算如公式(10) 所示。
同时,统计测试集中预测关键点与真实关键点之间平均欧式距离,以评估模型在测试集中的关键点定位精准度,如公式(11) 所示。
式中: 为平均误差;n为图像中关键点个数; 和 分别为预测点的像素坐标和人工标注点的像素坐标。
2.2.2 体尺参数测量评价指标
采用平均绝对误差(Mean Absolute Error, MAE)和平均相对误差(Mean Relative Error, MRE)作为体尺参数测量精度的评价指标,其计算如公式(12) 和公式(13) 所示。
式中:i为图像序号;n为试验数据总数; 为自动测量值; 为人工测量值。
2.3 模型训练及验证结果分析
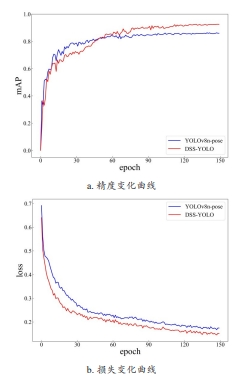
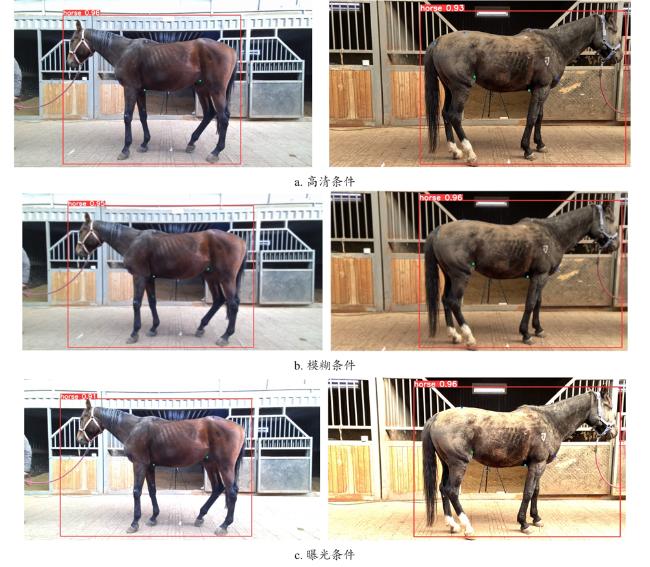
表3 DSS-YOLO模型对测试集中不同条件下的RGB图检测结果统计Table 3 DSS-YOLO model detection results of RGB images under different conditions in test set |
| 模型 | 条件 | d DSS/pixel |
|---|---|---|
| YOLOv8n-pose | 高质量 | 12.4 |
| 模糊 | 13.9 | |
| 曝光 | 15.2 | |
| DSS-YOLO | 高质量 | 7.2 |
| 模糊 | 7.9 | |
| 曝光 | 8.3 |
2.4 不同关键点检测模型对比试验结果
为了进一步评估本研究模型的关键点检测性能,分别采用目前主流的关键点检测模型Hourglass、HRNet和SimCC,并基于自制关键点数据集进行训练。完成训练后,模型验证最终结果如表4所示,其中DSS-YOLO的mAP值为92.5%,相比于Hourglass、HRNet和SimCC分别提高3.6%、2.8%和1.6%; 为7.2,相比于其余模型分别减小8.2、5.4和3.2个像素。表明DSS-YOLO模型的检测精度在验证集或测试集中都有着较高精度。在模型轻量化方面,参数量相比于其余模型分别减少91.36、25.04和23.26 M;运算量相比于Hourglass和HRNet分别减少19.6和7.7 G。
表4 不同关键点检测模型性能对比结果Table 4 Performance comparison of different keypoint detection models |
| 模型 | mAP/% | d DSS/pixel | 参数量/×106 M | 运算量/G |
|---|---|---|---|---|
| Hourglass | 88.9 | 15.4 | 94.84 | 28.7 |
| HRNet | 89.7 | 12.6 | 28.52 | 16.8 |
| SimCC | 90.9 | 10.4 | 26.74 | 6.8 |
| DSS-YOLO | 92.5 | 7.2 | 3.48 | 9.1 |
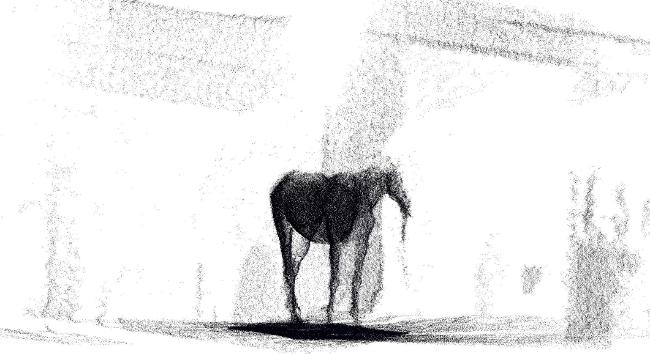
2.5 蒙古马点云重建结果分析
蒙古马点云最终重建结果如图14所示。经过一系列点云处理步骤之后,与全局点云相比,无关的背景点云和大部分噪声点云能被有效去除,同时对蒙古马三维点云中与体尺参数测量相关的信息进行分析和提取,获得了高精度的蒙古马体表点云信息。此外,通过将点云质心作为坐标系原点,设定体尺参数测量坐标系,为各项体尺参数的自动测量奠定了良好的基础。
2.6 体尺测量结果分析
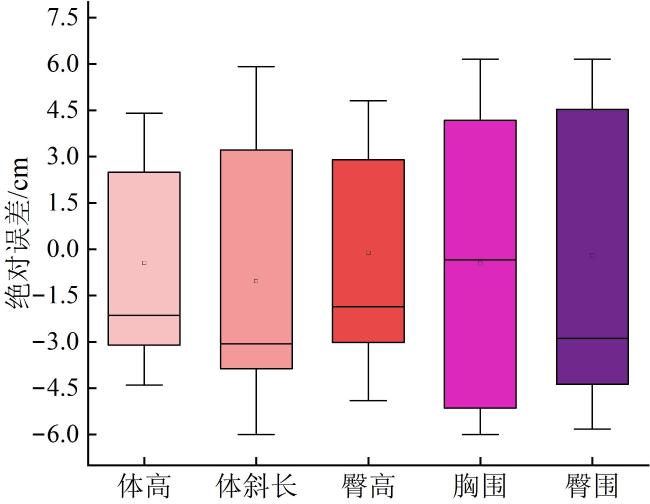
统计整体测量结果的MRE为2.29%,MAE为3.77 cm。其中,体高的MRE为1.93%,绝对误差控制为‒4.41~4.43 m;体斜长的MRE为2.51%,绝对误差控制为‒5.95~5.88 cm;臀高的MRE为2.02%,绝对误差控制为‒4.92~4.82 cm;胸围的MRE为2.46%,绝对误差控制为‒6.03~6.17 cm;臀围的MRE为2.51%,绝对误差控制为‒5.83~6.16 cm。
由于蒙古马的不同体尺参数共享相同的体尺测量点,基于轮廓特征点的关键点定位方法虽然具有一定的可取性,但是该方法容易受到目标马匹姿势、养殖环境及设备精度等因素的影响,导致关键点定位不准确。本研究构建基于卷积神经网络的二维关键点检测模型,结合三维点云处理方法,可高效、准确地获取蒙古马自然状态下的体尺参数。
3 结 论
为提高蒙古马体尺参数测量效率,加快选育进程,本研究提出DSS-YOLO模型结合三维点云处理的体尺自动检测方法,结论如下。
1)本研究在YOLOv8n-pose模型的基础上,通过设计C2f_DCN模块,在Backbone网络中融合可变形卷积(DCNv2);在Neck网络中添加SA注意力模块;将原始损失函数替换为SIoU,在模型训练过程中采用余弦退火法动态调节学习率。改进后得到的DSS-YOLO模型参数和运算量分别为3.48 M和9.1 GFLOPs,而mAP达到92.5%,在测试集中表现出较高的预测精度。结果表明,DSS-YOLO模型能满足真实场景中蒙古马测量关键点的自动检测需求。
2)完成蒙古马三维点云重建与处理分析后,基于DSS-YOLO模型的检测结果,可实现蒙古马体高、体斜长、臀高、胸围和臀围5项体尺参数的自动测量。通过在真实场景中选取30匹蒙古马进行现场测试,各项体尺参数的MRE为2.29%,MAE为3.77 cm。表明本研究所提出的方法精度较高,可满足实际生产需求。
3)本研究所提出的模型在自制数据集上表现良好,但在应对不同毛色、场景下的蒙古马可能表现不佳。因此,后续考虑使用迁移学习方法训练模型,以适应各种可能的马匹毛色和更加丰富的真实养殖环境。此外,由于本研究所使用Azure Kinect相机在某些情况下存在精度误差,后续研究考虑采用多线激光雷达结合RGB相机,并移植深度学习模型以构建蒙古马移动测量平台,满足实际操作中灵活性和简便操作的应用需要。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}