



0 引 言
1 除尘式油菜种子流检测装置整体结构与工作原理
1.1 检测装置粉尘来源分析
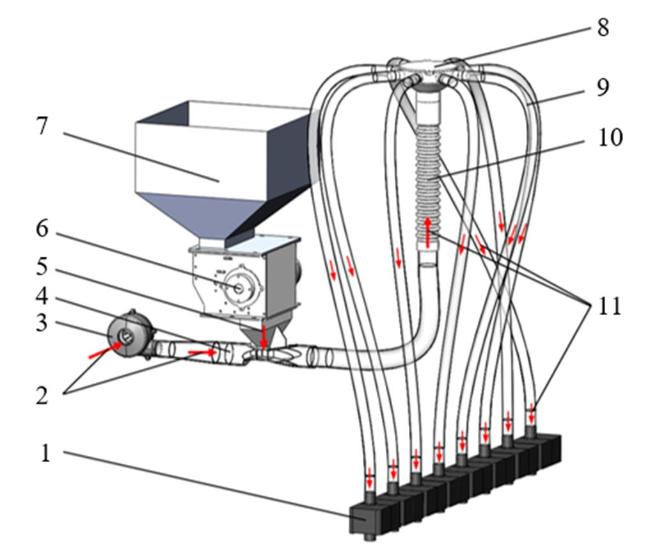
1.2 检测装置整体结构
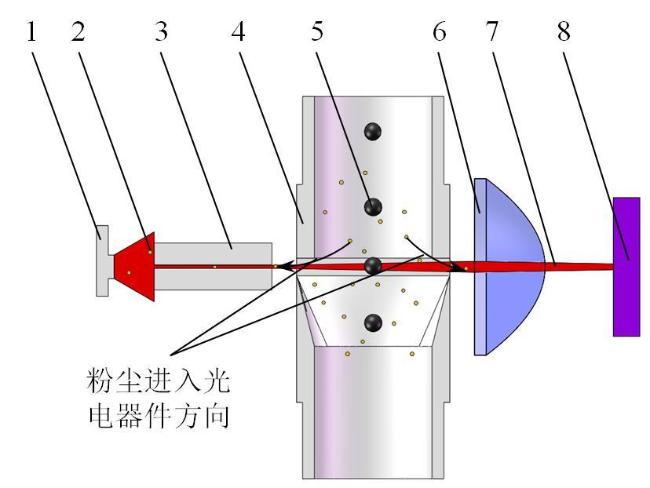
1.3 检测装置防尘除尘原理
2 除尘式检测装置主要结构设计与参数分析
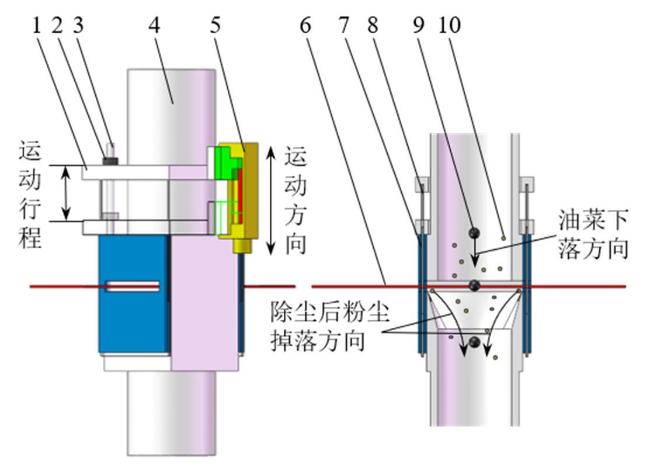
2.1 透明防尘板尺寸设计
图5 除尘式油菜种子流检测装置的透明防尘板长度与滑块位置关系 Fig. 5 Relationship between the length of the transparent dust proof plate and the position of the slider in the dust removal rapeseed flow detection device |
2.2 硅光电池实际电压与检测准确率关系分析

图6 除尘式油菜种子流检测装置的台架试验现场 Fig. 6 Bench test site of dust removal rapeseed flow detection device |
3 播种质量监测系统
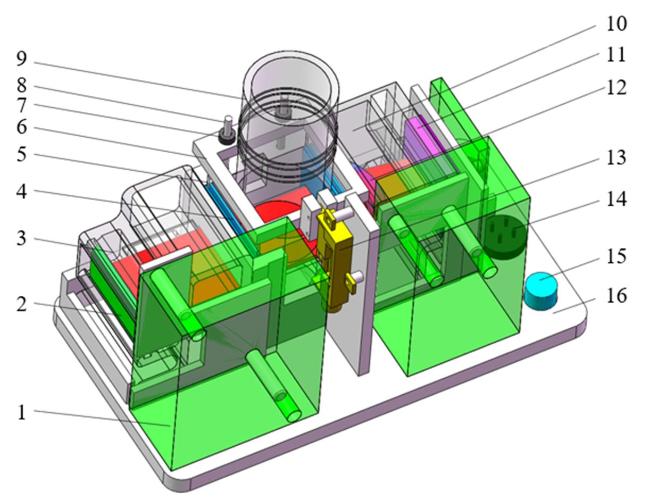
3.1 监测系统结构设计
3.2 检测与除尘程序流程
4 试验与结果分析
4.1 田间作业粉尘流量测定
表1 油菜气送式直播机的不同挡位粉尘流量测定结果Table 1 Measurement results of dust flow rate at different gears of rapeseed air-assisted direct seeding machine |
| 试验号 | 挡位 | 时间/s | 粉尘质量/mg | 平均粉尘流量/(mg/s) |
|---|---|---|---|---|
| 1 | 慢I挡 | 64 | 16 124 | 252 |
| 2 | 慢Ⅱ挡 | 48 | 15 692 | 327 |
| 3 | 慢Ⅲ挡 | 40 | 15 445 | 386 |
4.2 台架试验要求

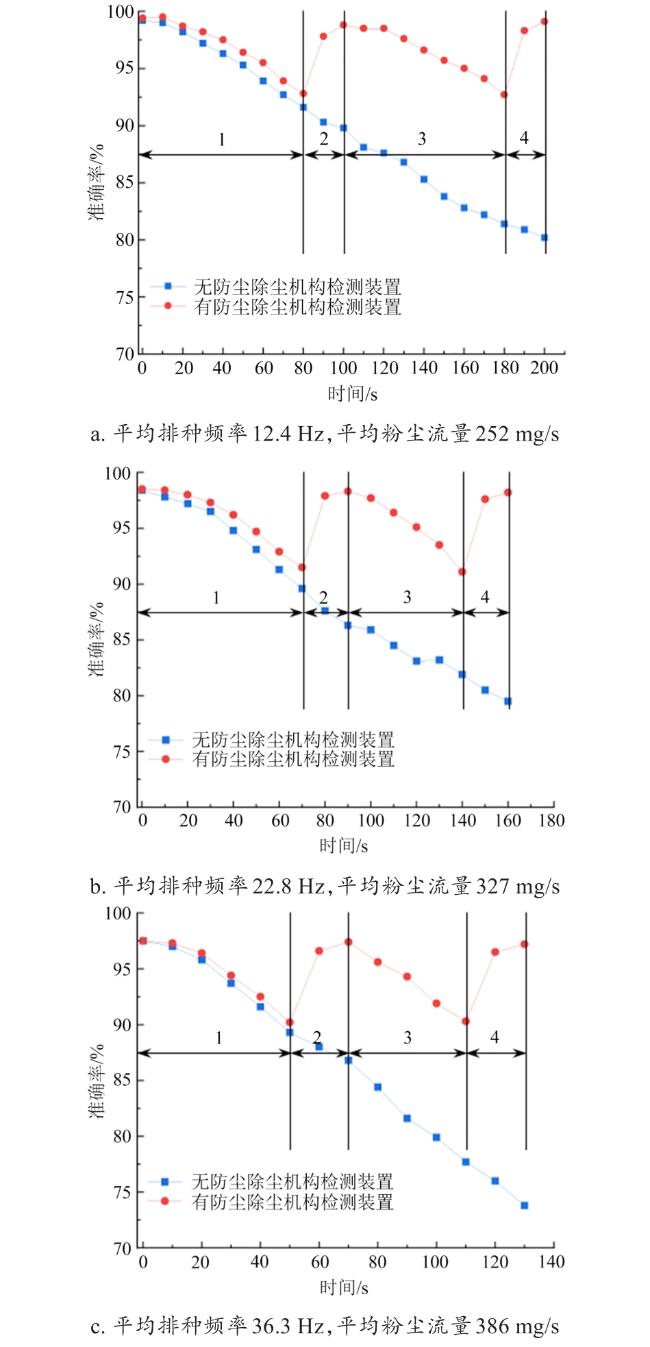
4.3 防尘除尘机构对检测准确率影响试验与结果分析
4.4 播量监测台架试验
表2 除尘式油菜播量监测系统在供种装置电机不同转速下的播量监测结果Table 2 Seeding rate monitoring results of the rapeseed seeding rate monitoring system at different speeds of the seed supply device motor |
| 传感装置序号 | 电机转速3 r/min | 电机转速7 r/min | 电机转速12 r/min | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 监测播 量/粒 | 实际播 量/粒 | 平均排种频率/Hz | 监测准 确率/% | 监测播 量/粒 | 实际播 量/粒 | 平均排种 频率/Hz | 监测准 确率/% | 监测播 量/粒 | 实际播 量/粒 | 平均排种 频率/Hz | 监测准 确率/% | |
| 1 | 2 207 | 2 285 | 11.4 | 96.6 | 3 401 | 3 568 | 22.3 | 95.3 | 4 467 | 4 788 | 36.8 | 93.3 |
| 2 | 2 178 | 2 241 | 11.2 | 97.2 | 3 158 | 3 310 | 20.7 | 95.4 | 4 472 | 4 835 | 37.2 | 92.5 |
| 3 | 2 633 | 2 740 | 13.7 | 96.1 | 3 499 | 3 645 | 22.8 | 96.0 | 4 411 | 4 733 | 36.4 | 93.2 |
| 4 | 2 493 | 2 583 | 12.9 | 96.5 | 3 320 | 3 488 | 21.8 | 95.2 | 4 249 | 4 540 | 34.9 | 93.6 |
| 5 | 2 359 | 2 442 | 12.2 | 96.6 | 3 574 | 3 731 | 23.3 | 95.8 | 4 333 | 4 639 | 35.7 | 93.4 |
| 6 | 2 302 | 2 378 | 11.9 | 96.8 | 3 745 | 3 917 | 24.5 | 95.7 | 4 404 | 4 756 | 36.6 | 92.6 |
| 7 | 2 572 | 2 668 | 13.3 | 96.4 | 3 592 | 3 776 | 23.6 | 95.1 | 4 267 | 4 566 | 35.1 | 93.4 |
| 8 | 2 407 | 2 494 | 12.5 | 96.5 | 3 529 | 3 711 | 23.2 | 95.1 | 4 501 | 4 882 | 37.6 | 92.2 |
4.5 田间试验

表3 除尘式油菜播量监测系统田间试验结果Table 3 Field test results of dust removal rapeseed seeding rate monitoring system |
| 挡位(速度)/(km/h) | 排种 时间/s | 传感装 置序号 | 监测播 量/粒 | 实际播 量/粒 | 监测准 确率/% |
|---|---|---|---|---|---|
| 慢I挡(2.8) | 131 | 1 | 1 862 | 1 938 | 96.1 |
| 2 | 1 969 | 2 043 | 96.4 | ||
| 3 | 2 095 | 2 187 | 95.8 | ||
| 4 | 2 124 | 2 213 | 96.0 | ||
| 5 | 2 149 | 2 253 | 95.4 | ||
| 6 | 1 980 | 2 069 | 95.7 | ||
| 7 | 2 178 | 2 271 | 95.9 | ||
| 8 | 2 051 | 2 135 | 96.1 | ||
| 慢Ⅱ挡(3.8) | 98 | 1 | 1 962 | 2 048 | 95.8 |
| 2 | 2 066 | 2 166 | 95.4 | ||
| 3 | 2 025 | 2 125 | 95.3 | ||
| 4 | 2 307 | 2 411 | 95.7 | ||
| 5 | 1 989 | 2 097 | 94.9 | ||
| 6 | 2 100 | 2 205 | 95.2 | ||
| 7 | 2 176 | 2 283 | 95.3 | ||
| 8 | 1 927 | 2 018 | 95.5 | ||
| 慢Ⅲ挡(4.6) | 77 | 1 | 2 139 | 2 295 | 93.2 |
| 2 | 2 091 | 2 210 | 94.6 | ||
| 3 | 2 143 | 2 287 | 93.7 | ||
| 4 | 2 001 | 2 117 | 94.5 | ||
| 5 | 2 178 | 2 340 | 93.1 | ||
| 6 | 2 080 | 2 218 | 93.8 | ||
| 7 | 2 234 | 2 394 | 93.3 | ||
| 8 | 2 197 | 2 333 | 94.2 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}