



0 引 言
对靶喷雾技术在国外研究起步较早,覆盖了识别[3]、导航[4, 5]、作物检测等各方面[6, 7],上世纪就有相对成熟的视觉识别系统被应用于植保机器人上[8, 9]。由于蔬菜种植的株距随机,杂草识别具有挑战性,Jin等[10]利用CenterNet模型对蔬菜进行检测,该模型只专注于识别蔬菜,从而避免处理各种杂草。Perugachi-Diaz等[11]研究发现Alex Net能够实现对白菜幼苗94%的平均识别精度。为了解决精准对靶喷雾机行走速度和喷雾压力对喷嘴喷雾量的影响,Sun等[12]研制了以C310工业控制器为核心的麦田植保精准喷洒机器人控制系统,实际对靶喷雾与理论喷药量误差小于5%。Jalal等[13]研制了小型农业机器人进行精准喷药,通过提高机器人行驶速度,最高可减少76%的药剂喷洒量。相比之下,中国基于机器视觉的对靶喷雾等技术起步较晚,但发展迅速[14]。学者在大田蔬菜对靶施药[15]、田间杂草对靶施药[16]、室内对靶施药[17],以及果园对靶喷雾机器人[18, 19]等领域开展了研究。影响对靶喷雾量误差和覆盖率的主要因素为对靶喷雾的响应时间、喷雾压力和速度等。但在当前的相关研究中,主要考虑喷雾压力[20]、高度[21]和延时时间对对靶喷雾的影响,需要对对靶喷雾的喷头喷雾量误差[22]和对应的有效对靶覆盖率进一步探索[23]。
为提升对靶喷雾环节的喷施质量,设计并实现了一种基于YOLOv8-Ghost-Backbone轻量化目标检测模型的白菜株心对靶喷雾系统。在确定延时时间的基础上,探究了不同喷雾频率下对应的喷头喷雾量,并通过试验分析得出了系统的喷雾覆盖率。以期为农业植保在对靶喷雾技术应用和工况参数的选择提供参考,减少农药浪费,提高农药利用率。
1 对靶喷雾控制系统设计
1.1 总体结构
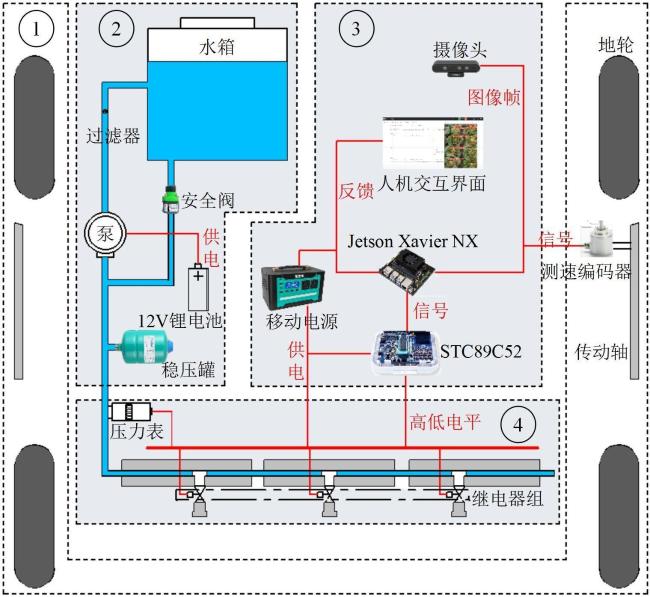
本研究提出的对靶喷雾控制系统主要面向株间距30~50 cm的白菜株心对靶施药作业,对靶喷雾系统如图2所示,系统主要由四个关键模块组成:行走机构、稳压供药模块、靶标识别模块和对靶喷雾模块。系统的核心在于系统的控制机制与作业流程。摄像头作为靶标识别模块的核心组件,负责实时采集田间地面信息到Jetson Xavier NX控制板。Jetson Xavier NX控制板对图像进行靶标提取,并根据提取靶标结果对电磁阀启闭进行决策。随后,控制板将提取结果以数据帧的形式实时通过串口发送给STC89C52单片机。单片机对数据帧解析后,将连接继电器的管脚置为高电平,继电器进而放大信号并驱动电磁阀组开闭,实现对靶喷雾作业。在这过程中,稳压供药模块发挥着至关重要的作用。其内置的稳压罐和安全阀能够有效抑制由于继电器间歇启闭引起的管路压力波动,确保整个系统的供药压力稳定,进而保证药液的雾化质量。
1.2 稳压供药管路系统
稳压供药管路的设计至关重要,它确保了药液在整个系统中的稳定流动,从而保证了喷雾作业的高效性和准确性。管路主要连接药箱、过滤器、隔膜泵、稳压罐、安全阀等关键组件,实现了药液从药箱到喷头的稳定供应。
柱塞泵作为动力源,为整个供药管路提供了持续而稳定的动力输出。在控制系统的指令下,柱塞泵将药箱中的药液抽出,并送往系统的下一个环节。药液在流经过滤器时,其中的杂质和颗粒物被有效滤除。经过过滤的药液进入稳压装置。稳压装置中的稳压罐内部装有压缩胶囊,当电磁阀瞬间关闭时,管路中的压力会瞬时升高。稳压罐内的压缩胶囊会迅速释放气体,对管路中的压力进行缓冲和稳定,确保系统的稳定运行。若管路中的压力超过了预设的安全值,安全阀会被顶开,排放部分药液回到药箱中,从而有效地降低系统压力,避免系统因压力过高而受损。柱塞泵的动力输出由24 V的锂电池提供。为了保障系统中其他电子设备的正常运行,如控制器和继电器组等,采用12 V移动电源进行供电。
1.3 对靶喷雾控制系统
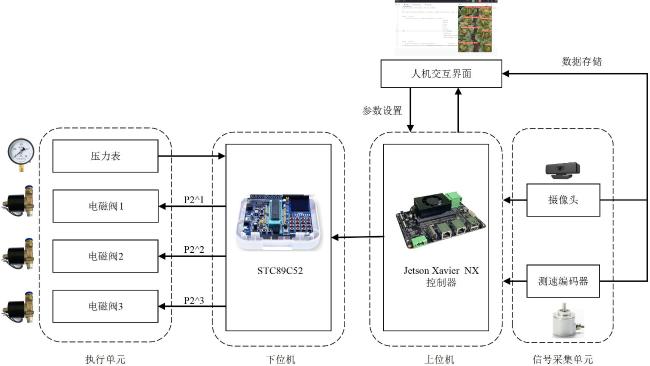
对靶喷雾系统的核心组件包括Gemini-3D深度相机、人机交互界面、Jetson Xavier NX控制板、STC89C52单片机和测速编码器等。控制系统结构如图2所示。这一设计旨在确保对靶喷雾作业的高效、准确执行。首先,Gemini-3D深度相机作为系统的视觉核心,拥有出色的性能参数。拥有低至0.15 m的超小盲区与高达10 m的深度测距范围,最高分辨率像素为1 920×1 080,内置的深度引擎MX6600则负责快速、准确地处理深度数据,为后续的图像处理与识别提供有力支持。Jetson Xavier NX控制板负责接收深度相机传输的图像数据,并进行高效的图像处理和识别。通过YOLOv8-Ghost-Backbone算法,Jetson Xavier NX控制板能够快速识别出白菜株心,并将识别结果转换为电信号,实时传输至单片机控制喷头的启闭。这种对靶喷雾的控制方式确保了药液能够准确地喷洒在目标区域,提高了施药效率。继电器组是连接控制板与喷头的重要组件,系统选用DC3.3-5 V兼容继电器进行控制,确保了系统的稳定性和可靠性。同时,系统设置等距安装的3路喷头,能够覆盖更广泛的作业区域。电磁阀与喷体采用直连方式,减少了药液传输过程中的时间损耗,提高了系统的响应速度。测速编码器用于实时监测行进速度,并将速度信息传输至人机交互界面进行显示。整个控制系统由移动电源进行供电。综上所述,控制系统通过集成组件和精确的控制方式,实现了对靶喷雾作业的高效、准确执行。
2 对靶喷雾控制算法设计
白菜作为广泛种植的蔬菜之一,其在种植过程中需要控制适当的株距以保证足够的生长空间和养分供应。根据一般农艺标准,白菜的株距要求在33~50 cm之间,这一范围旨在确保植株之间的竞争不过于激烈,同时充分利用土地资源。同样,施药量也是影响作物生长的重要因素之一。对于白菜而言,其施药量通常建议在300~450 L/ha之间。不同地区由于气候、土壤等自然条件的差异,对白菜的种植株距和施药量也会有所调整[24]。
研究中,以种植间距50 cm、施药量450 L/ha的试验条件为例,深入探究对靶喷施作业中速度与喷施频率的优化策略。分析了靶标作物的冠层宽度(靶宽)、喷杆至靶标的距离(靶距),以及机具前进速度之间的相互作用关系,决定了对靶喷雾过程中电磁阀的启闭时间。因此,适合当前种植条件的作业速度有助于实现对靶喷施技术的精准控制,提高施药效果和资源利用效率,为白菜等蔬菜作物的健康生长和产量提升提供有力支持。
2.1 YOLOv8-Ghost-Backbone目标检测算法
YOLOv8以其高效性、创新性、多功能性、可扩展性、易用性和性能提升著称,同时还支持广泛的硬件和原生自定义数据集,成为了当前蔬菜识别领域普遍使用的目标检测算法之一。为提高通用YOLOv8网络模型的检测性能,分别引入与卷积神经网络兼容的SE-Net、CA、SimAM、CBAM四种注意力机制进行对比,将四种模型分别记为YOLOv8-SE、YOLOv8-CA、YOLOv8-SAM、YOLOv8-CBAM,四种模型的准确率P、召回率R和平均精度(Mean Average Precision, mAP)均值结果对比如表1所示,YOLOv8-CBAM在三个指标上均取得最优结果,因此选择在主干网络引入CBAM注意力机制,以更好地提升模型的特征提取能力。
表1 融合不同注意力机制结果对比研究 (%)Table 1 Comparative study on the results of fusion of different attention mechanisms |
| 模型 | 准确率 | 召回率 | mAP50 |
|---|---|---|---|
| YOLOv8 | 91.2 | 88.9 | 93.2 |
| YOLOv8-SE | 91.9 | 89.9 | 94.3 |
| YOLOv8-CA | 92.4 | 91.2 | 94.5 |
| YOLOv8-SAM | 91.6 | 90.1 | 93.8 |
| YOLOv8-CBAM | 93.4 | 92.5 | 94.4 |
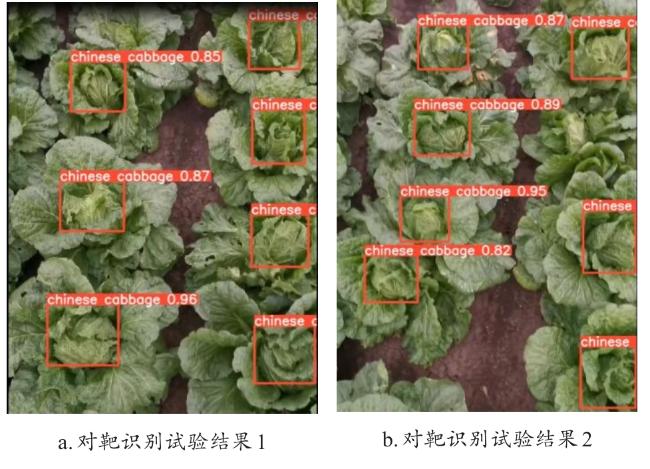
采集白菜数据集1 565张,通过预处理、仿射变换、高斯噪声注入,以及颜色扭曲等手段对数据集图像进行特点增强,将数据集图像增强至3 085张。在实际图像处理中,即使在白菜叶片覆盖密集的情况下,模型对白菜株心的识别精度能够达到93%,展示了模型识别结果的可靠性。
YOLOv8-CBAM的核心优势在于检测速度快,能够实现实时目标检测,这使得其特别适合于实时对靶喷雾等应用场景。为解决C2f网络结构复杂的问题,将轻量化Ghostnet主干网络作为Backbone的基础结构核心。图3展示了改进的YOLOv8-Ghost-Backbone的网络结构,该结构通过引入Ghostnet主干网络显著降低了网络复杂度。
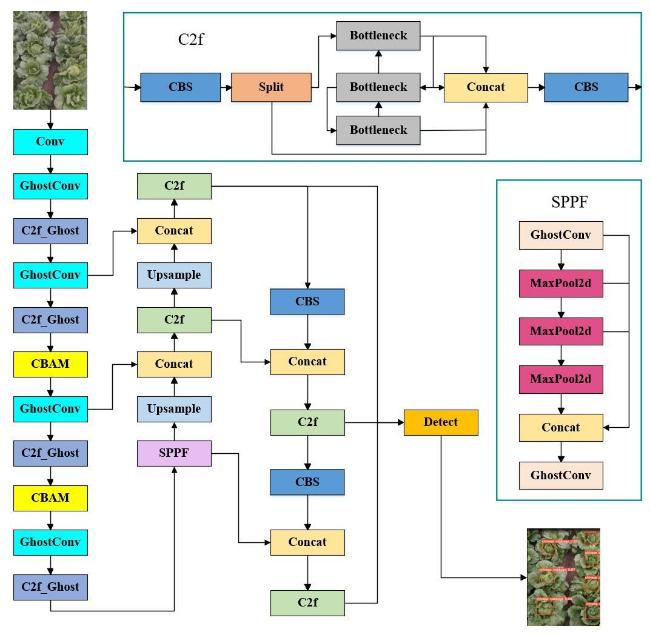
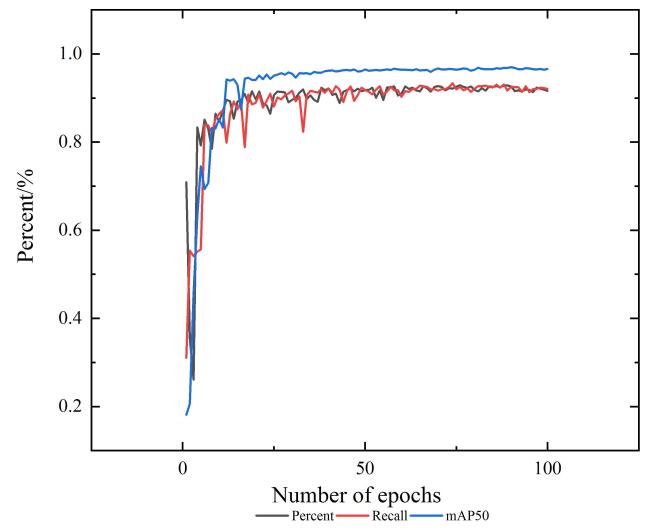
经过增加注意力机制对比验证,YOLOv8-Ghost-Backbone模型对白菜株心识别性能方面表现突出。相较于YOLOv8模型的参数量(Params)和计算量均有大幅度降低,增强了模型对于白菜株心的检测精度,也在处理田间复杂环境时表现出更好的鲁棒性。其准确率为93.4%,召回率为92.5%,mAP50为94.4%。更换主干网络的YOLOv8-Ghost-Backbone网络训练结果如图4所示。
为了验证本研究中使用的YOLOv8-Ghost-Backbone模型在白菜株心识别任务中的改进效果,将YOLOv8与YOLOv8-Ghost-Backbone性能对比,结果如表2所示。改进后的YOLOv8-Ghost-Backbone模型mAP50提高1.2%,每秒帧数(FPS)提高8帧,Params降低0.7 M,仅为6.5 M,模型更加轻量。
表2 YOLOv8的白菜识别模型改进结果研究Table 2 Research on improvement results of Chinese cabbage recognition model based on YOLOv8 |
| 检测模型 | mAP50/% | FLOPs/G | FPS/(帧/s) | Params/M |
|---|---|---|---|---|
| YOLOv8 | 93.2 | 10.8 | 75 | 7.2 |
| YOLOv8-Ghost-Backbone | 94.4 | 9.2 | 83 | 6.5 |
将对靶喷雾系统的识别范围划分为识别区域,每个识别区域绘制一个执行框,与需要打开的喷嘴对应,当预测框与执行框的相交面积达到设定的阈值时,上位机通过串口通信向下位机传输喷雾信号,由下位机做延时处理后,控制电磁阀的开启和关闭。在实际应用中,YOLOv8-Ghost-Backbone能够精确检测白菜株心,并实时控制喷雾系统,确保药液准确喷洒至目标区域,如图5所示。
2.2 响应频率计算方法
Gemini-3D深度相机以20°的仰角向前采集图像。在计算中,设置了以下参数:靶宽50 cm,靶距50 cm,电磁喷头相对摄像头50 cm,且喷头离地高度也设置为50 cm。这些相对位置关系如图6所示。
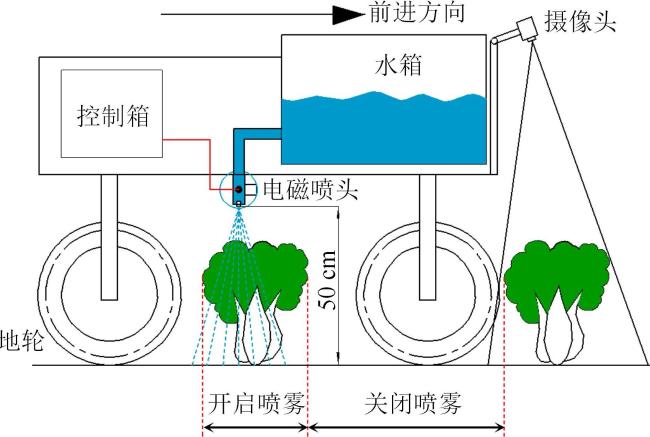
基于前进速度、靶标位置和摄像头的空间位置,利用公式(1)~公式(3) 进行数据预处理,计算喷雾的响应频率。根据摄像头安装位置,喷头固定在悬挂架上,视为刚性连接,这有助于确保喷雾的准确性和稳定性。
式中:W target为靶标宽度,cm;d为对应的靶距,cm;v为前进速度,m/s;f为电磁阀的开关频率,Hz;T 1为电磁阀开启时间,s;T 2为电磁阀的关闭时间,s。
2.3 实时控制方法
2.3.1 延时分析
在对靶施药过程中,保证靶标检测与喷雾一致是对靶的重点之一。设摄像头的采集范围与喷头之间的垂直距离为S,系统时间t system为喷雾机以匀速v行驶距离L所花时间如公式(4) 所示。
设ti nherent_delay为系统响应时间,当t system>t inherent_delay时,喷雾机可以通过系统延时补偿实现靶标检测与喷雾的一致性;当t system<t inherent_delay时,机器前进所用的时间小于系统对图像处理、响应的时间,通过改变摄像头的角度和摄像头之间的相对位置S,实现对靶喷雾。
为了确定系统的延时时间,需要先测定系统的整体响应时间。
2.3.2 响应时间测点
将对靶喷雾系统响应时间的主要来源分为三个部分进行测定,分别为。
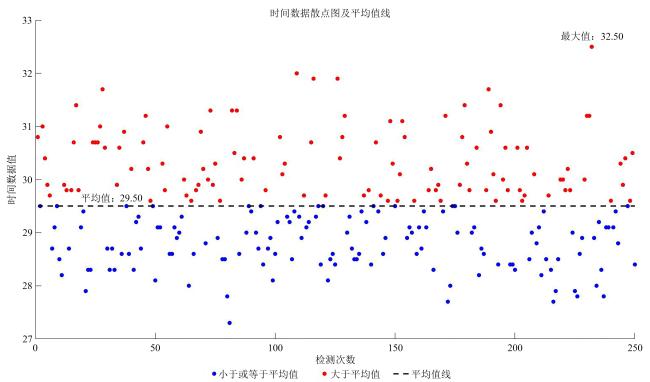
1) 图像处理时间测量为t 1。试验将训练好的YOLOv8-Ghost-Backbone目标检测模型搭载在Jetson Xavier NX控制器上运行检测。通过处理250帧田间白菜图像的耗时,导出总耗时为7 643.9 ms,平均每帧耗时29.50 ms,单帧最长耗时为32.5 ms。检测数据如图7所示。
2) 喷雾决策信号的传递时间为t 2。信号从车载计算机对目标图像处理完成后,经继电器组信号放大输出,最终驱动电磁阀组。此过程通过示波器测量,耗时为6.4 ms。
3) 对靶喷雾耗时为t 3。电磁阀收到对靶喷雾决策后开启喷雾,带压农药通过喷嘴雾化并沉积到靶标上。使用高速摄像机拍摄了喷雾过程,拍摄系统包括PCO.dimax CS3型号摄像主机和NIKON 24-85 mm F2.8-4D广角变焦镜头。拍摄现场如图8所示。
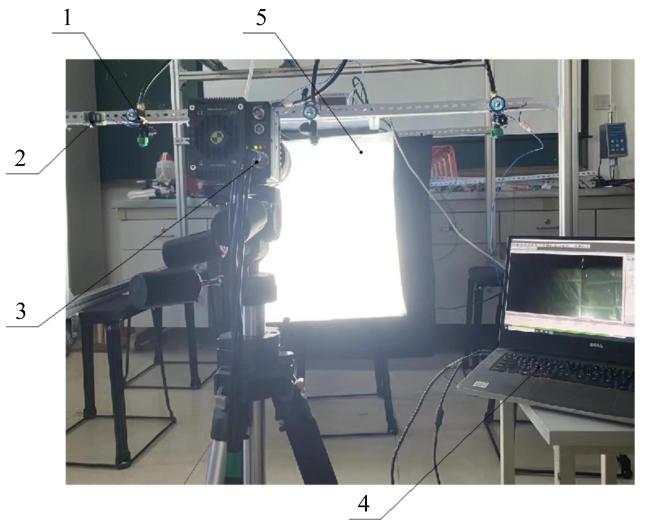
在特定条件下(管路压力0.3 MPa,喷嘴相对靶标高50 cm),拍摄频率为5 000 fps,曝光时间为3.26 μs。通过分析350帧图像,确定了喷雾过程的关键节点:电磁阀从第26帧继电器接收到喷雾信号,第60帧开始有喷雾从喷嘴喷出,第70帧药液完成雾化开始持续喷雾,随后在75帧继电器指示灯关闭,直到235帧喷雾完全停止。经过计算得出,整个喷雾过程耗时t 3=88.83 ms。对靶喷雾耗时过程的记录如图9所示。

根据耗时公式(5) 。
式中:t为对靶喷雾响应的滞后时间,ms。最终可以得出对靶施药响应滞后于电信号约124.73 ms,为对靶喷雾机的前进速度、压力选择和喷雾决策的延时处理提供了数据支持,其测量方法具有一定的适用性。
根据对靶喷雾控制系统的滞后性,喷雾机前进时间需大于系统响应时间,即t system>t inherent_delay,要求喷雾机的前进速度v≤14.4 km/h。
3 对靶喷雾量与覆盖率获取试验
3.1 试验目的及内容
为确保对靶喷雾过程中施用在靶标作物上的农药量恒定,探究对靶喷雾过程中电磁喷头快速启闭所引发的变化,以优化喷雾作业效率。根据实际的农艺喷施要求和对靶喷雾的响应滞后时间,探讨了电磁喷头在不同启闭频率下对系统的影响,通过流量获取试验,明确实际喷雾量与需求喷雾量之间的差异,并据此确定适合对靶喷雾的最优前进速度。具体试验内容如下。
1) 根据预设的农艺条件,包括株距和靶宽,设定了喷雾机的速度,分别为3.6、7.2、10.8和14.4 km/h,根据这些速度条件,设置相应的电磁喷头输出开关频率。试验过程中,测量了不同频率下,电磁喷头单次启闭所对应的喷雾量,并计算了开关1 min的累计值。
2) 为了获取更准确的试验数据,记录多次试验结果,并计算了平均值。使用Origin软件进行数据的曲线拟合,以更直观地展示喷雾量变化与开关频率之间的关系。将拟合得到的曲线进行对比,计算出相对误差值,评估了试验结果的准确性。
3) 对试验结果进行了深入分析。评估了电磁阀不同开关频率下,喷雾的实际表现,确定合适的作业速度。
4) 在不同速度下,对10颗白菜进行连续识别对靶喷雾作业,记录单颗识别和整体作业耗时,并且记录喷雾对单颗白菜株心的覆盖率和喷雾量,验证是否满足实际需要。
3.2 试验材料及方法
表3 对靶喷雾系统的喷雾量获取试验方案Table 3 Test protocol for obtaining the spray volume of the target spray system |
| 施药量/(L/ha) | 速度/(km/h) | 喷头型号 | 喷雾压力/MPa | 频率/(次/s) |
|---|---|---|---|---|
| 450 | 3.6 | ST110-04 | 0.20 | 1 |
| 450 | 7.2 | ST110-06 | 0.40 | 2 |
| 450 | 10.8 | ST110-10 | 0.30 | 3 |
| 450 | 14.4 | ST110-15 | 0.25 | 4 |
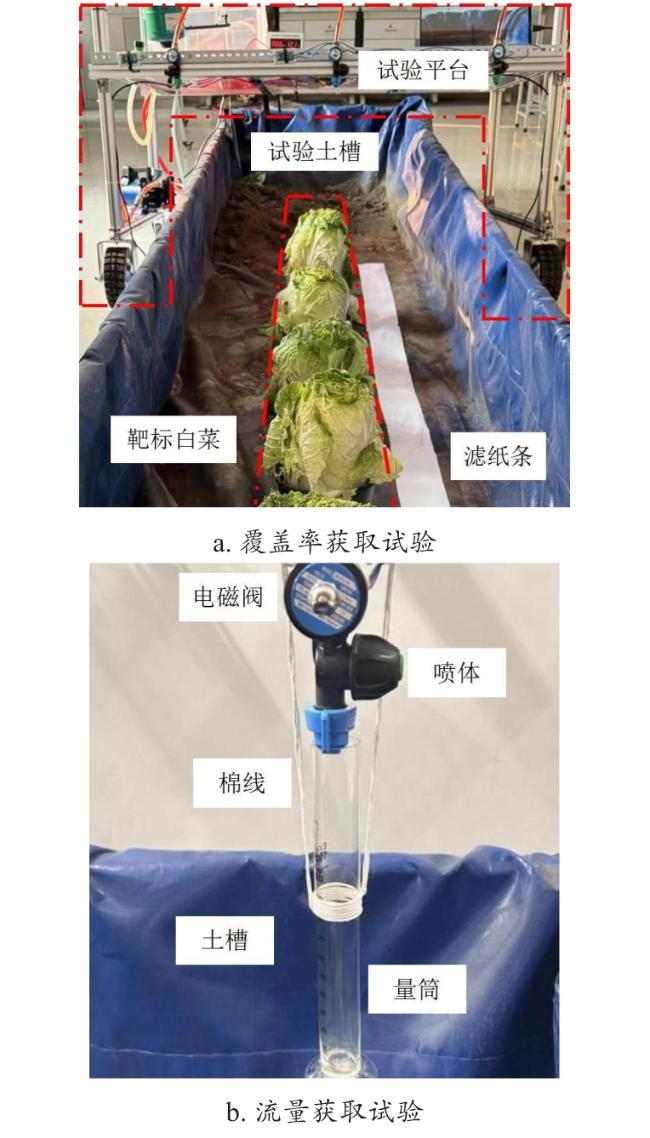
将10颗白菜按照株距50 cm等距放置在土槽内。药箱中加入胭脂红染色剂。在每行白菜左侧布置米尺、10 m长的白色滤纸(当加入胭脂红的水喷施到滤纸上时,滤纸变成红色),用着色部分占比得到对靶喷雾覆盖率。量筒安装在喷嘴下方读取对靶喷雾过程中的实际喷雾量。对每株白菜的覆盖率进行计算,最终求得喷雾覆盖的均值。对靶喷雾试验现场如图10所示。
3.3 试验结果及分析
由于速度在14.4 km/h时,电磁喷头开关的频率过快,无法快速测得单次开关的喷雾量值,因此测量单次开关喷雾量值时,控制电磁喷头开启时间为0.125 s,关闭时间为1 s,为测量速度为14.4 km/h时的喷雾量值留下充足的时间。为了减小试验误差,相同条件下进行5次重复试验,取重复试验结果的平均值作为结果。测得对靶喷雾系统的4种速度所对应的单次喷雾量值和1 min的累计喷雾量值如表4所示。
表4 对靶喷雾控制系统的喷雾量获取研究Table 4 Study on spray amount acquisition of target spray control system |
| 喷头型号 | 喷雾压力/MPa | 速度/(km/h) | 频率次/s | 对靶实际喷雾量/L | 对靶需求喷雾量/L | 相对误差/% | |||
|---|---|---|---|---|---|---|---|---|---|
| 单次喷雾量 | 1 min喷雾量 | 单次喷雾量 | 1 min喷雾量 | 单次喷雾量 | 1 min喷雾量 | ||||
| ST110-04 | 0.20 | 3.6 | 1 | 0.014 | 0.86 | 0.010 8 | 0.65 | 30.0 | 32.0 |
| ST110-06 | 0.40 | 7.2 | 2 | 0.012 | 1.36 | 0.011 2 | 1.35 | 7.1 | 0.7 |
| ST110-10 | 0.30 | 10.8 | 3 | 0.010 | 1.58 | 0.010 4 | 1.95 | 3.8 | 19.0 |
| ST110-15 | 0.25 | 14.4 | 4 | 0.010 | 2.76 | 0.006 1 | 2.95 | 63.9 | 6.4 |
对试验结果进行处理,绘制4组不同速度下试验结果的柱状图,其结果如图11所示。
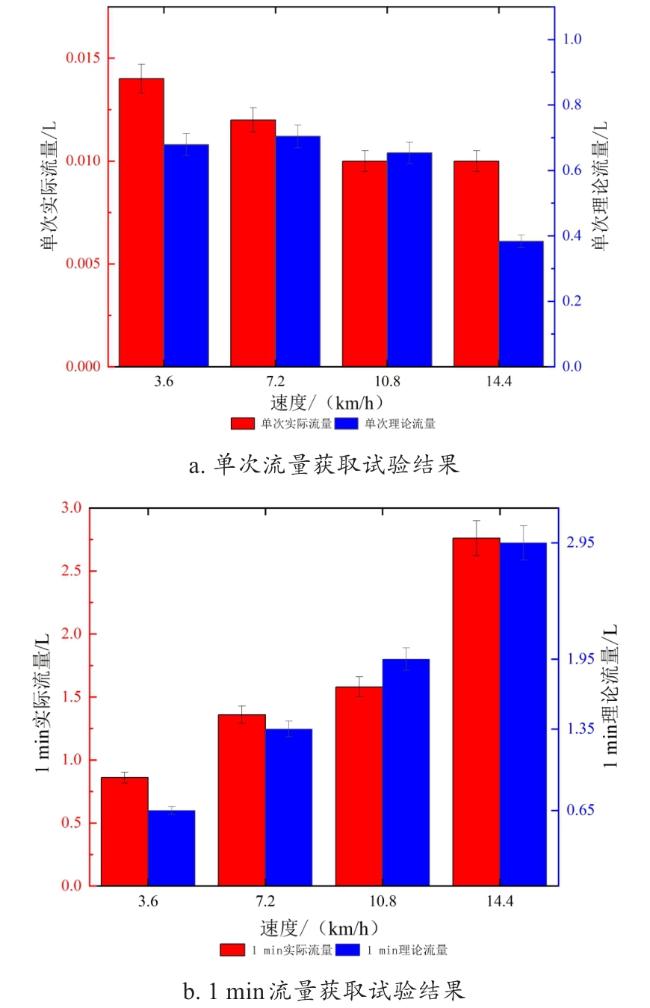
由图11可知。喷雾量值在单次启闭时造成的喷雾量差值变化较小,但是随着时间的累计、速度的增加,以及喷雾的开关频率增大,喷雾量在不同工况下的差值变得显著。特别地,速度为10.8 km/h时的单次喷雾量和1 min的实际喷雾量小于需求喷雾量,不能达到作业要求;在速度为3.6 km/h时,单次及1 min的实际喷雾量均超过需求值;速度为14.4 km/h时,1 min实际喷雾量虽然与需求喷雾量相差不大,但是在单次开关中的喷雾量相差较大。唯有速度在7.2 km/h时,作业的喷雾量符合作业要求,且实际喷雾量与需求喷雾量基本相符合。
装载平台分别以设定的速度前进,每次试验结束后,导出系统检测时间,对每个喷施靶标进行单独拍照。读取量筒的实际喷雾量和滤纸条带喷施的胭脂红水迹的起止刻度,记录在EXCEL中。图12展示了7.2 km/h速度下的对靶喷雾覆盖情况。

在3.6 km/h的速度下,对靶喷雾10颗白菜的平均覆盖率为88%,实际喷雾量为15.6 ml。随着速度的增加对靶喷雾的平均覆盖率逐渐降低,喷雾量逐渐减少。当速度达到14.4 km/h时,10颗白菜的平均覆盖率为77%,实际喷雾量为5.7 ml。具体试验结果如表5所示。
表5 白菜株心覆盖率的对靶喷雾试验结果Table 5 Target spray test results of plant core coverage of Chinese cabbage |
| 喷头型号 | 喷雾压力/MPa | 速度/(km/h) | 单颗识别耗时/ms | 整体耗时/ms | 平均覆盖率/% | 实际喷雾量/mL | 药液需求量/mL |
|---|---|---|---|---|---|---|---|
| ST110-04 | 0.20 | 3.6 | 38.6 | 402 | 88 | 15.6 | 10.8 |
| ST110-06 | 0.40 | 7.2 | 37.9 | 398 | 86 | 13.5 | 11.2 |
| ST110-10 | 0.30 | 10.8 | 38.5 | 400 | 82 | 10.2 | 10.4 |
| ST110-15 | 0.25 | 14.4 | 37.6 | 396 | 77 | 5.7 | 6.1 |
4 结 论
本研究针对白菜株心及其内叶叶缘识别,设计了一套基于机器视觉的对靶喷雾控制系统。该系统涵盖了硬件平台的搭建与配置,对深度学习算法进行了针对性改进,实现白菜株心的高效识别,并进行了算法验证试验,得到如下结论。
1) 构建了针对白菜株心识别的改进YOLOv8-Ghost-Backbone模型,其准确率、召回率和mAP50分别达到93.4%、92.5%和94.4%,较通用YOLOv8网络模型mAP50提高1.2%, FPS提高8帧,Params降低0.7 M,仅为6.5 M,保证了对靶喷雾的准确性。
2) 系统地对对靶喷雾的响应时间进行了测量与分析。其中图像处理平均耗时29.50 ms、决策信号传递耗时6.40 ms,而喷雾耗时为88.83 ms。综合这三个关键阶段,对靶施药系统相对于电信号的响应滞后时间总计约为124.73 ms。这一时间数据为优化喷雾控制系统提供了依据。
3) 在对靶喷雾量与覆盖率获取试验的基础上,本研究发现,在7.2 km/h速度条件下,单次开关的实际与需求值的差异较小,且在1 min内的差值变化较小,保证喷雾量符合要求的前提下,不会造成过多的药液浪费。
4) 在实际作业中,7.2 km/h速度下,能够识别到每一颗白菜,无漏检现象,且对单颗白菜的平均喷雾覆盖率为86%,喷雾量符合实际作业要求。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}