



0 引 言
早期密集穴盘苗的检测主要采用阈值分割等传统图像处理方法来获取苗株位置信息。胡飞等[7]采用灰度化因子和Otsu法分割幼苗与背景,并通过单连通区域法统计叶片面积,根据叶片面积大小实现了番茄幼苗识别和定位。王纪章等[8]提出了基于Kinect相机的穴盘苗生长过程无损监测方法,通过图像分割获取的幼苗轮廓和深度值计算得到叶片中心像素点坐标及其对应的深度信息。然而,在苗株越界生长程度较大的情况下,效果不佳。张国栋等[9]采用图像阈值分割和腐蚀运算分离穴盘苗和背景,根据穴孔区域像素数量判断幼苗状态,该方法对于越界程度较小的苗株检测准确性较高,但对于越界严重的苗株,识别准确性显著降低。曹丹丹等[10]通过对比深度学习与传统图像处理方法在穴盘苗缺苗穴位的检测结果,发现传统图像处理方法在苗叶越界情况下的缺苗穴位检测效果较差。
近年来,随着计算机算力的不断提升,深度学习技术在目标检测领域广泛应用,许多学者通过改进和优化这些深度学习模型,解决越界生长苗株的识别和定位问题。Xiao等[11]基于GoogLeNet,使用9个Inception-V3模块构建深度卷积网络,对有叶片侵入缺苗穴孔检测准确率为81.5%。崔永杰等[12]提出基于YOLOv4的密集穴盘苗缺苗检测方法,穴盘缺苗穴孔检测模型平均正确率均值为96.1%,平均定位成功率为95.45%,显著优于传统图像处理方法。司来强[13]提出了基于改进的Faster RCNN和EfficientNet穴盘苗分级方法,改进模型在穴盘苗分级任务中平均准确率达到96.03%。模型参数量增加虽然提高了检测精度,但网络复杂度不断提高。因此,同时考虑参数量和检测精度的轻量级模型受到更多的关注。常见的模型轻量化的方法包括模型压缩、模型量化、知识蒸馏、网络剪枝等[14],通道剪枝属于网络剪枝的一种,其主要是通过降低网络的通道数来减少模型的复杂度和计算量,从而提高模型的运行效率和准确性。Fan等[15]结合通道剪枝提出了一种基于YOLOv4深度学习算法的苹果缺陷实时检测方法,不仅简化了YOLOv4模型,还提高了模型性能。梁晓婷[16]提出一种基于模型剪枝的番茄表面缺陷实时检测方法,在保持检测精度的同时将网络模型尺寸和推理时间分别减少了232.40 MB和10.11 ms。
研究者运用深度学习方法针对在越界生长的穴盘苗分级识别与定位方面取得了一定成效,但针对穴盘苗严重越界生长带来的定位问题仍然没有得到有效解决。为了解决穴盘苗越界生长造成的草莓穴盘苗识别和定位的问题,本研究提出了一种基于轻量化YOLOv8s的草莓穴盘苗分级识别和定位方法,首先,采用通道剪枝算法压缩草莓穴盘苗-穴孔检测模型大小和参数量,以提高模型推理速度;其次,通过检测模型提取苗株和穴孔边界框信息,并设计一种两阶段草莓穴盘苗-穴孔匹配定位算法以获取各分级苗株在穴盘中的具体位置信息,为自动化穴盘苗分选提供了技术支持。
1 材料与方法
1.1 数据集构建
数据采集地点为陕西省杨凌龙德盛农业科技有限公司草莓育苗温室,图1所示为草莓育苗温室和草莓扦插苗,拍摄对象为扦插后14—15天草莓穴盘苗图像,品种包含红颜、章姬、妙香7号等,草莓苗种植在50穴方形穴孔、标准尺寸为540 mm×280 mm的穴盘中。采集时间为2023年12月8日—2024年1月31日,采集设备为小米K40智能手机,其后置摄像头为64 MP+8 MP+2 MP三摄组合。为了更好地获取整个穴盘情况,拍摄时手机离地高度为60 cm,并保持与地面平行。采集数据时,拍摄的时间和光照强度各异,采集的样本包含阴天和晴天的图像,所采集的图像分辨率像素为2 016×4 480。剔除了过度曝光、质量较低的图像,剩余900张图像构成数据集。

1.2 穴盘苗数据分析

1.3 数据集标注
利用开源标注工具LabelImg[18]手动标注弱苗、正常苗和穴孔,并将标注结果保存为YOLO格式,图3是样本标注举例。将标注完的图像按8∶1∶1的比例分为训练集、验证集和测试集。为提高模型泛化能力,防止因样本数量不足导致的模型过拟合,对训练集图像进行翻转、调整亮度的数据增强操作,最终获得2 160张训练集图像、90张验证集图像和90张测试集图像,其中,训练集的主要作用是用于模型的训练,即通过模型在训练集上的学习,使其能够学习到数据中的模式和特征。验证集则用于在训练过程中对模型进行评估和调优,以确保模型在未见过的数据上也能表现良好。而测试集则作为完全独立的数据集,用于最终评估模型的精度。通过这样的划分和使用,能够有效地评估模型的训练效果和泛化能力,从而确保模型在实际应用中的有效性和可靠性。

2 基于轻量化YOLOv8s的穴盘苗分级识别和定位方法
2.1 YOLOv8网络
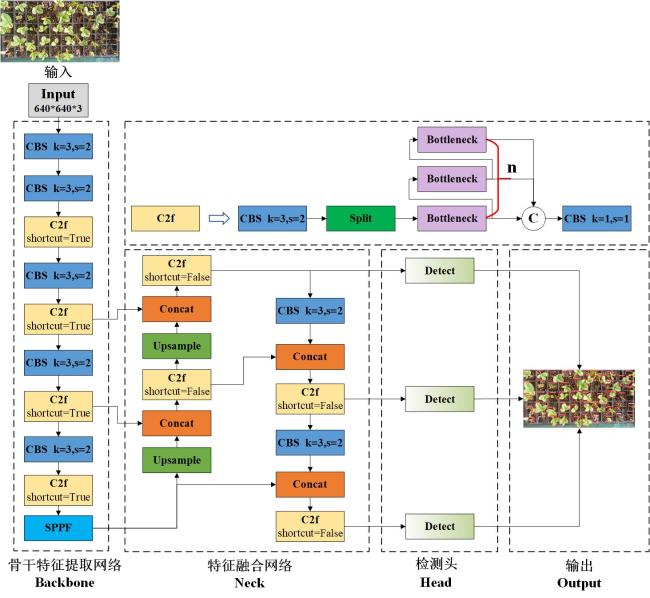
YOLOv8是Ultralytics公司开发的基于YOLOv5的一种先进的目标检测模型,同时包括了目标跟踪、实例分割、图像分类和姿态估计等视觉任务。YOLOv8网络架构由三个主要组件组成:骨干特征提取网络(Backbone)、特征融合网络(Neck)和检测头(Head),如图4所示,其中Backbone和Neck部分参考了YOLOv7[19]中高效层聚合网络(Efficient Layer Aggregation Networks, ELAN)的设计思想,将YOLOv5的C3结构换成了梯度流更丰富的C2f结构。Head部分相比YOLOv5改动较大,换成了目前主流的解耦头结构[20],将分类和检测头分离,同时也从Anchor-Based换成了Anchor-Free,这种方法消除了对预定义锚框的需要,允许模型直接从数据中学习对象表示,提高了模型性能。
2.2 基于LAMP Score通道剪枝的YOLOv8s草莓穴盘苗-穴孔检测模型
尽管YOLOv8s模型在草莓穴盘苗和穴孔识别数据集上表现出较好的性能,但其仍难以满足轻量级、实时性和易于模型部署要求。因此,本研究对YOLOv8s模型进行剪枝,在保持精度的同时简化模型结构和复杂度。组(group)是结构化剪枝的最小单元,大多数组由相互依赖的多层组成,需要一起剪枝以保持结构的完整性,不同网络架构中的参数分组方式各不相同,在传统的剪枝流程中,参数的分组通常是手工完成的。
式中:u、v代表权重的索引;W[u]表示索引u映射的权重项; 则代表在同一层中索引大于u的权重平方和。具体剪枝流程有以下4个步骤:
1)建立依赖图。假设要修剪对象为 ,对于依赖关系为 ⇔ , 、 将被绑定一起进行修剪,如图5第2列所示,颜色相同的部分为一个组,剪枝过程中它们会一起被修剪掉。依赖图利用相邻层的局部依赖关系,递归地推导出所需要的分组矩阵。
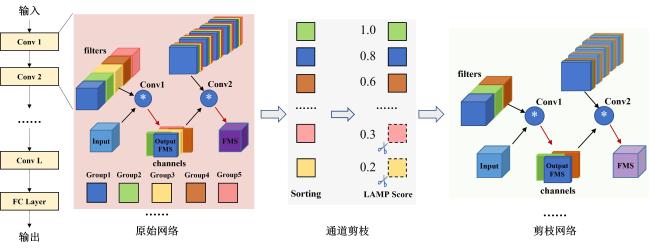
2)基于重要性评分的通道修剪。通过计算分组内每一个通道重要性,然后求平均值得到每个分组重要性,并利用公式(1) 对组重要性分数作归一化处理并作为最终评分。接着,根据预先设定的剪枝比例和归一化后各分组的重要性评分,确定并删除最不重要的组,过程如图5第3~4列所示。
3)微调剪枝模型。由于较高的剪枝率可能会导致模型精度的损失,因此需要对模型进行微调以有效地恢复损失的精度。微调通过优化重新校准修剪模型的参数,以补偿因去除通道而造成的精度损失,并在效率和性能之间取得平衡。
2.3 两阶段草莓穴盘苗-穴孔匹配定位方法
在精准补苗和分苗作业中,准确定位穴孔位置至关重要。本研究利用草莓穴盘苗分级检测模型提取苗孔的边界框坐标、ID、分类等信息,通过计算苗孔重叠度(Degree of Overlap, Dp)大小作为苗孔匹配依据,如公式(2) 。
式中:A为穴孔检测框面积;B为草莓苗检测框面积; 代表穴盘苗和穴孔检测框交集面积。当草莓苗未越界生长时,Dp值达到最大。
为了实现草莓穴盘苗和穴孔的准确匹配,设计了一种两阶段匹配算法,流程如图6所示,通过两阶段匹配以获得各级草莓穴盘苗所在穴孔的位置信息,主要匹配过程如下。
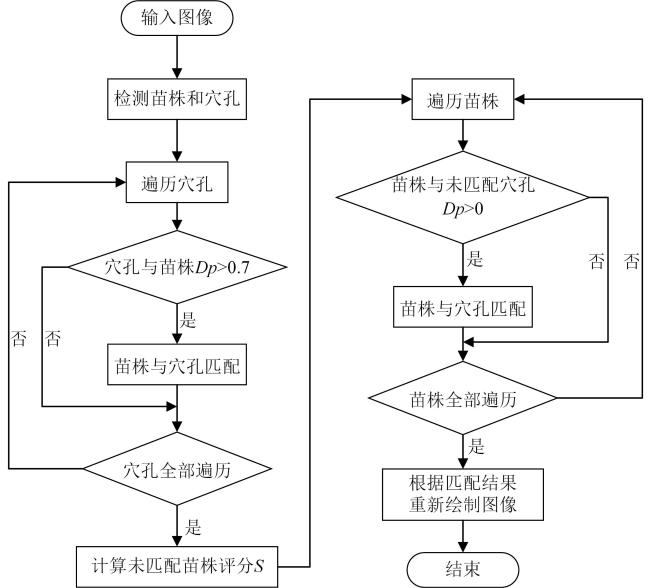

第二阶段匹配主要为越界明显的草莓苗构建匹配关系。根据第一阶段匹配过程所有未匹配苗株与穴孔之间的Dp信息,对每个未匹配苗株,累加其与所有已匹配穴孔的Dp值,并将此累加值与该苗株和未匹配穴孔间的最大Dp值相加,更新其评分,计算如公式(3) 所示。
2.4 评价标准
采用准确率(Precision, P)、召回率(Recall, R)、平均准确率(Mean Average Precision, mAP)和F 1分数衡量模型在实际检测过程中的精度;使用参数量(Parameters)、每秒执行的10亿次浮点运算次数(FLOPs)、模型权重大小和推理时间评价模型是否为轻量级模型。
P反映了模型正确预测阳性样本的能力,计算见公式(4) 。
R是指所有预测阳性样本与所有真阳性样本的比值,计算见公式(5) 。
F 1分数评价的是P和R的综合性能,通常作为模型评价的最终指标,计算见公式(6) 。
mAP指的是在不同置信度下最高精度的平均值,一般情况下根据不同的类别的AP值分别计算,计算见公式(7) 和公式(8) 。
式中:TP表示实际为某一类(如弱苗,正常苗,穴孔)的样本被正确地预测为该类的数量;TN表示实际不属于某一类(如弱苗,正常苗,穴孔)的样本被正确地预测为其他类的数量;FP表示实际不属于某一类(如弱苗,正常苗,穴孔)的样本被错误地预测为该类的数量;FN表示实际为某一类(如弱苗,正常苗,穴孔)的样本被错误地预测为其他类的数量。
3 结果与分析
3.1 实验设置
实验计算机CPU为Intel Xeon(R) Platinum 8222CL @3.00 GHz、内存为128 GB,搭载24 GB显存的NVIDIA GeForce RTX 3090显卡两张;软件环境操作系统为Ubuntu 18.04,编译平台为Visual Studio 2017,编译语言为Python3.8.8,深度学习框架采用PyTorch[23] 2.0.1构建。
在实际实验中,为了合理比较,所有模型的超参数设置相同,部分参数设置如下:网络输入图像像素尺寸为640×640,在模型训练过程中,初始学习率设为0.01,配合优化器SGD(Stochastic Gradient Descent)调整学习率,设定权重衰减率为0.000 5,动量因子设置为0.937;为降低对内存要求,批量大小设置为16,训练轮数设置为250轮。
3.2 不同网络模型的对比试验
表1 不同网络模型的草莓穴盘苗和穴孔检测对比结果Table 1 Comparison of detection results for strawberry plug seedlings and holes using different network models |
| Model | P/% | R/% | mAP/% | F 1/% | FLOPs/G | Params/M | Model size/MB | Inference time/s |
|---|---|---|---|---|---|---|---|---|
| YOLOv8s | 91.5 | 93.9 | 95.4 | 93.4 | 28.4 | 11.13 | 21.5 | 6.3×10-3 |
| YOLOv8s-MobileNetv3 | 90.3 | 93.6 | 95.1 | 92.0 | 16.7 | 6.73 | 13.1 | 6.2×10-3 |
| YOLOv8s-ShuffleNetv2 | 90.2 | 93.2 | 94.6 | 91.7 | 15.9 | 5.94 | 11.6 | 5.6×10-3 |
| YOLOv8s-EfficientViT | 91.6 | 93.2 | 94.9 | 92.4 | 20.4 | 8.38 | 16.7 | 7.2×10-3 |
| YOLOv8s-FasterNet | 91.7 | 93.4 | 95.3 | 92.5 | 21.7 | 8.61 | 16.7 | 6.4×10-3 |
| Fine-tuned-YOLOv8s | 91.9 | 95.1 | 96.4 | 93.5 | 3.9 | 0.51 | 1.2 | 4.3×10-3 |
由表1可以看出,经过剪枝后的Fine-tuned- YOLOv8s模型相比较其他不同轻量化骨干网络改进的YOLOv8s模型在mAP中分别提高了1.3%,1.8%,1.5%,1.1%,F 1提高了1.5%,1.8%,1.1%,1%。剪枝后的模型大小仅为1.2 MB,比原模型减少了94.4%;与基础YOLOv8s模型相比,Fine-tuned-YOLOv8s模型P提高了0.4%,R提高1.2%,mAP提高1%,F 1分数提高了0.1%,并且FLOPs减少了86.3%,参数量减少了95.4%,推理时间减少了31.7%。综上所述,本研究采用的基于LAMP Score通道剪枝方法在保持检测精度的同时,减小了模型尺寸和参数,并提高了模型的检测效率。
3.3 不同剪枝参数对比试验
针对所使用的通道剪枝方法,设计了不同剪枝参数的对比试验,探究不同剪枝率对模型产生的影响。实验首先设置不同的剪枝率,根据剪枝率对训练好的YOLOv8s模型进行剪枝,然后对剪枝后的网络进行微调,得到最终模型,主要参数设置如表2所示。
表2 草莓苗-穴孔检测模型通道剪枝过程中相关剪枝参数设置Table 2 Parameter settings for channel pruning in the strawberry seedling-hole detection model |
| 阶段 | 参数设置 | |
|---|---|---|
| 剪枝 | Pruning rate/% | 85.7 |
| Global_pruning | True | |
| 微调 | Image size | 640×640 |
| Epochs | 250 | |
| Batch_size | 16 | |
| Optimizer | SGD | |
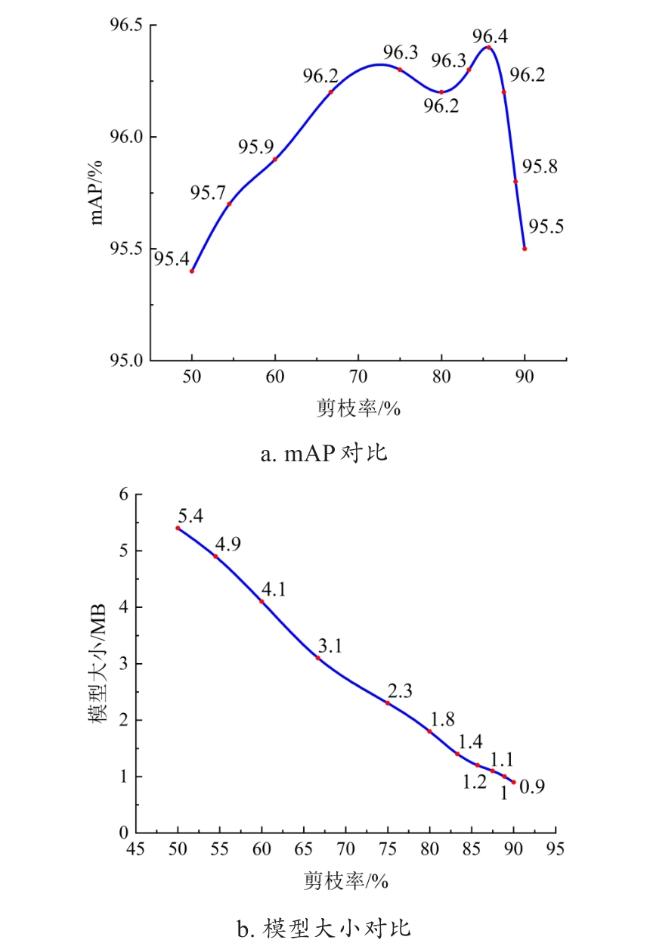
剪枝率与mAP、模型大小的关系如图8所示。随着剪枝率的增加,模型尺寸逐渐减小,mAP随剪枝率的增加而波动,当剪枝率为85.7%时,mAP达到最大值96.4%,随后下降,选择剪枝率的原则是在检测时间满足在线检测要求的情况下,尽可能选择mAP值最大的情况。因此,综合考虑mAP和模型大小,剪枝率设为85.7%。
3.4 不同网络模型识别性能可视化结果对比
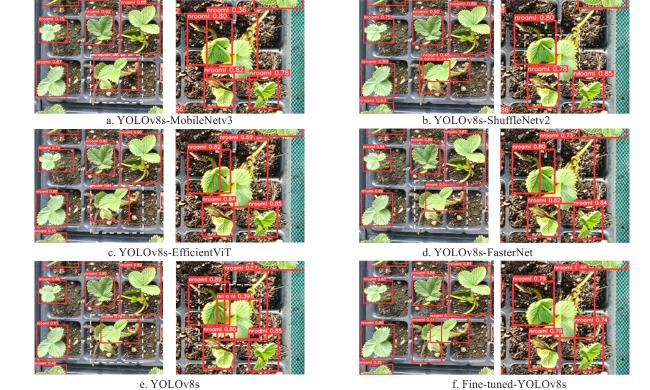
图9为改进后的网络和不同轻量化骨干网络改进的YOLOv8s模型检测可视化结果比较。由图9a、图9c、图9d和图9e可以观察到,YOLOv8s-MobileNetv3、YOLOv8s-EfficientViT、YOLOv8s-FasterNet和YOLOv8s模型对第一张图中两个高度重叠的正常苗识别出现了漏检的情况。由图9b和图9e第二张图可以观察到YOLOv8s- ShuffleNetv2对穴盘苗密集生长的区域出现了漏检的情况,而YOLOv8s则出现了重复检测的情况。在图9f中可以看出,剪枝后的模型能够识别出两个高度重叠正常苗,并且在穴盘苗密集生长的区域也能够准确识别每棵苗。这些结果表明,所提出的Fine-tuned -YOLOv8s模型在轻量化的前提下,对穴盘苗的分级识别效果依然优越。
3.5 两阶段草莓穴盘苗-穴孔匹配定位算法试验结果
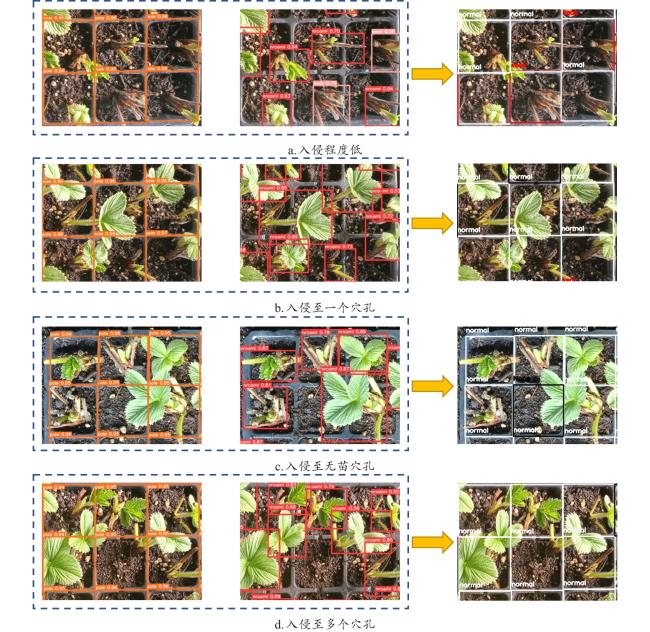
对测试集90张图片进行了测试,结果如表3所示,可以观察到,正常苗匹配正确率最高,达到了96.6%,弱苗的匹配正确率最低,为82.9%,无苗的匹配正确率为84.5%,平均准确率为88%,能够满足实际生产过程的需求。图10为两阶段草莓穴盘苗-穴孔匹配定位算法可视化结果。如图10a所示,当穴盘苗入侵程度较小时,所提出的算法能够准确定位其位置信息;如图10b所示,当穴盘苗入侵至相邻一个穴孔,并且在其相邻穴孔重叠度明显大于实际生长的穴盘苗情况下,所提出的算法能够准确定位越界苗和实际苗的位置信息;如图10c所示,当穴盘苗入侵至相邻无种植的穴孔时,能够准确定位无苗位置信息;如图10d所示,即使穴盘苗入侵至多个穴孔,依然能够准确定位其位置信息。综上,所提出的算法在面对各种复杂的草莓苗株越界生长情况时,仍能实现精准的分级检测,准确的穴盘苗定位,满足了草莓穴盘苗培育过程中的实际需求。
表3 各级草莓穴盘苗定位研究中两阶段草莓穴盘苗-穴孔匹配定位算法实验结果Table 3 Experimental results of the two-stage strawberry plug seedling-hole matching and localization algorithm in multi-level strawberry plug seedling positioning research |
| 类别 | 实际数量/株 | 匹配成功数量/株 | P/% | mAP/% |
|---|---|---|---|---|
| 正常苗 | 3 438 | 3 320 | 96.6 | 88 |
| 弱苗 | 888 | 736 | 82.9 | |
| 无苗 | 174 | 147 | 84.5 |
3.6 讨论
针对基于YOLOv8s草莓穴盘苗-穴孔目标检测模型参数量过大,检测速度慢的问题,本研究基于LAMP Score通道剪枝算法对草莓穴盘苗-穴孔识别模型进行压缩,表4为通道剪枝前后模型效果的比较。从表4可以看出,模型在剪枝过程中损失了一部分原本有助于特征表示和泛化能力的参数,导致了模型性能显著降低,而微调通过更精细的参数调整,可以重新构建有效的特征表达,弥补剪枝带来的信息损失。微调后的模型与原模型相比,不仅减少了参数冗余和计算复杂度,提高了模型的推理速度,而且在部分精度指标上略有提升。在剪枝微调过程中,剪枝率的变化可能并不是线性地影响模型的性能,随着剪枝率的增加,模型可能会在某些关键通道被剪掉后性能下降,但在进一步剪枝时,剩余的通道可能会重新分配权重,从而恢复甚至提升性能,这也导致了模型在剪枝微调过程中的性能表现出现一定的波动,所以需要通过较多实验去寻找模型精度与速度平衡点,使模型性能达到最佳。
表4 草莓穴盘苗-穴孔检测模型通道剪枝前后模型效果比较Table 4 Comparison of model performance before and after channel pruning for strawberry plug seedling-hole detection. |
| Model | P/% | R/% | mAP/% | F 1/% | FLOPs/G | Params/M | Model size/MB | Inference time/s |
|---|---|---|---|---|---|---|---|---|
| YOLOv8s | 91.5 | 93.9 | 95.4 | 93.4 | 28.4 | 11.13 | 21.5 | 6.3×10-3 |
| Pruned-YOLOv8s | 54.5 | 73.2 | 66.7 | 62.5 | 3.9 | 0.51 | 1.2 | 4.3×10-3 |
| Fine-tuned-YOLOv8s | 91.9 | 95.1 | 96.4 | 93.5 | 3.9 | 0.51 | 1.2 | 4.3×10-3 |
其次,本研究基于剪枝后模型的检测结果,提出的两阶段草莓穴盘苗-穴孔匹配定位算法实现了各级草莓穴盘苗在穴盘中的识别和定位。针对叶片入侵相邻穴孔的草莓苗株定位问题,算法通过第一阶段匹配过程获得的高质量匹配结果,有效减少了后续匹配中越界生长苗株的潜在匹配穴孔数量。同时,在第二阶段更新剩余未匹配苗株的评分,评分越高则表明未匹配苗株的潜在匹配穴孔数量越少,并根据评分高低顺序再匹配,准确定位越界生长苗株在穴盘的具体位置。

4 结 论
随着现代农业的发展,深度学习技术在水果分级与品质检测的研究中得到了广泛应用,但在密集草莓穴盘苗分级检测与定位方面的探索相对较少,本研究通过分析穴盘内正常苗、弱苗和无苗等特性,提出一种基于LAMP Score通道剪枝的轻量化YOLOv8s草莓穴盘苗分级检测与定位方法。研究首先通过LAMP Score通道剪枝算法压缩了草莓穴盘苗-穴孔识别模型,与原模型相比,剪枝后的模型参数量减少了95.4%,推理时间减少了31.7%,模型大小仅为1.2 MB,mAP提高了1%;其次,基于剪枝后的模型提出了两阶段草莓穴盘苗-穴孔匹配定位算法,通过两阶段匹配准确定位穴盘中的各级草莓穴盘苗,所提出的算法对无苗、弱苗和正常苗的平均定位准确率为88%,能够为草莓穴盘苗生产中的缺苗和补苗作业提供准确的位置信息。
尽管本研究在密集草莓穴盘苗对各分级苗株的识别和定位取得了一定成果,但仍有不足。因此,未来可以在以下方面需进一步完善与探索。首先,由于目标检测算法对于数据质量和数量要求较高,在实际的草莓穴盘苗培育过程中,在各种外界因素的影响下其生长大小、方向具有随机性,未来可通过采集更多的越界生长样本,以提高模型的鲁棒性和泛化能力,改进其定位精度。其次,穴盘苗的识别与定位准确性主要受叶片入侵遮挡的影响,可以通过设计机械装置等手段减少遮挡情况。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}