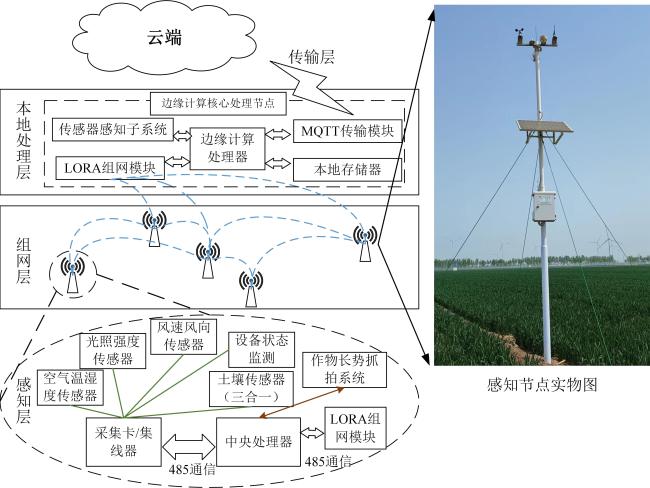
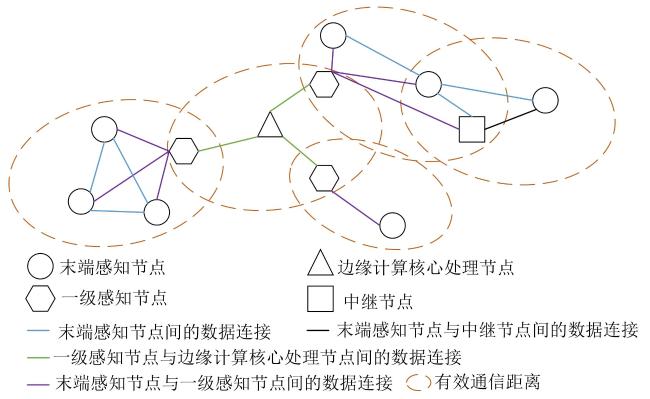
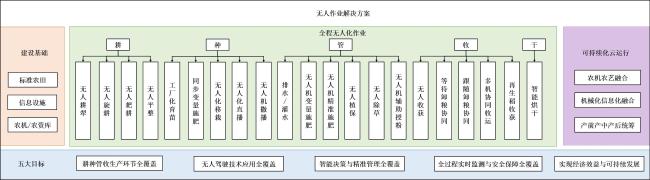
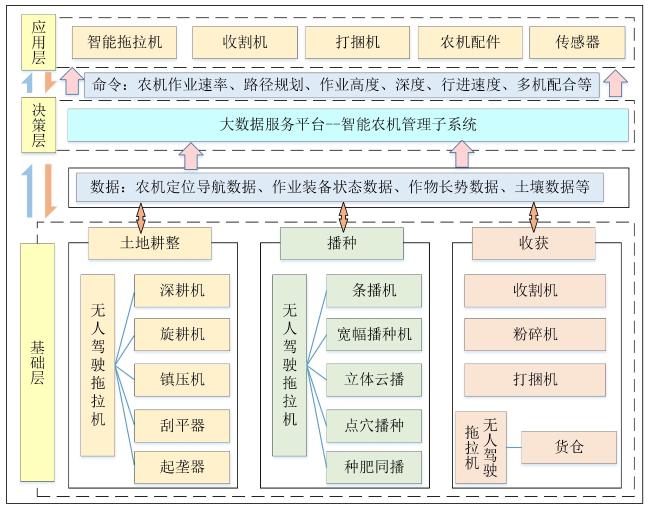
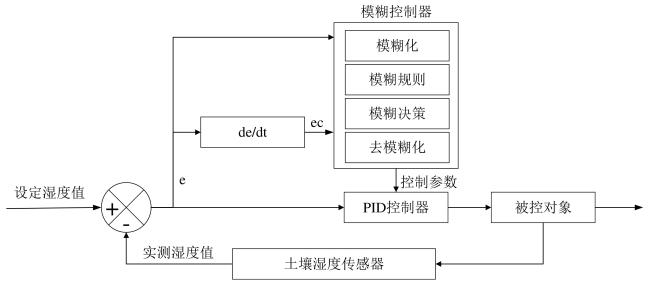
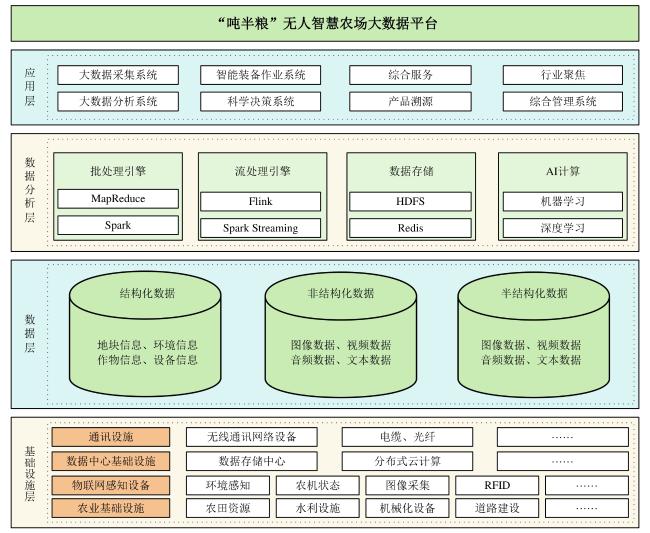
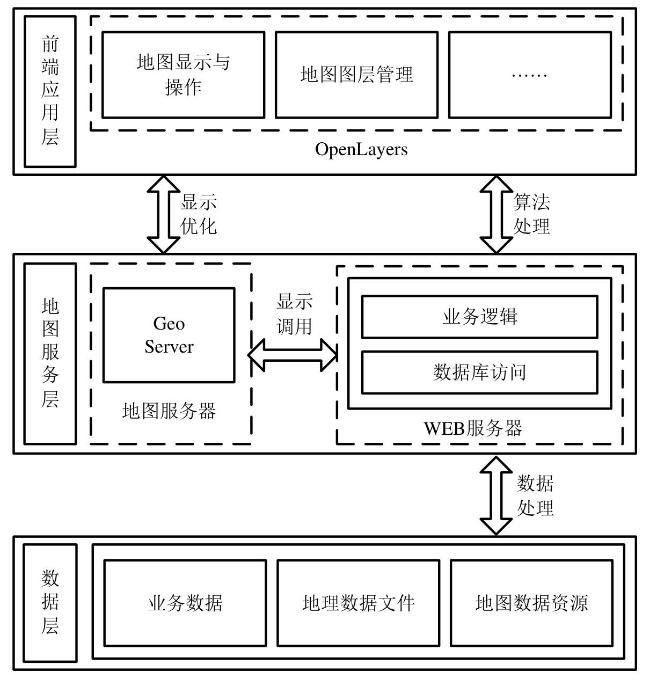
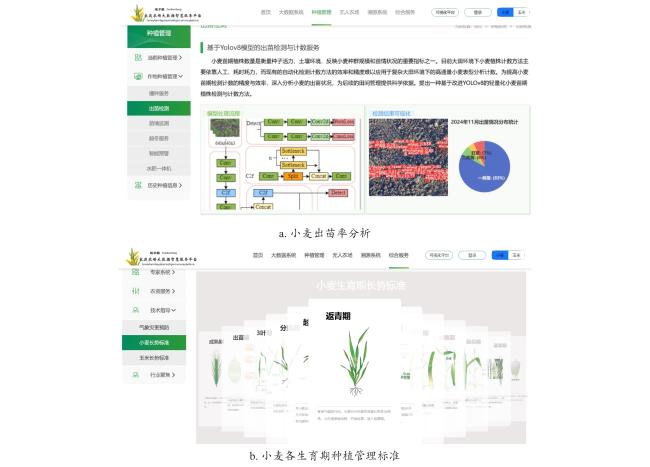
[Objective] As a key model of smart agriculture, the unmanned smart farm aims to develop a highly intelligent and automated system for high grain yields. This research uses the "1.5-Ton grain per Mu" farm in Dezhou city, Shandong province, as the experimental site, targeting core challenges in large-scale smart agriculture and exploring construction and service models for such farms. [Methods] The "1.5-Ton grain per Mu" unmanned smart farm comprehensively utilized information technologies such as the internet of things (IoT) and big data to achieve full-chain integration and services for information perception, transmission, mining, and application. The overall construction architecture consisted of the perception layer, transmission layer, processing layer, and application layer. This architecture enabled precise perception, secure transmission, analysis and processing, and application services for farm data. A perception system for the unmanned smart farm of wheat was developed, which included a digital perception network and crop phenotypic analysis. The former achieved precise perception, efficient transmission, and precise measurement and control of data information within the farm through perception nodes, self-organizing networks, and edge computing core processing nodes. Phenotypic analysis utilized methods such as deep learning to extract phenotypic characteristics at different growth stages, such as the phenological classification of wheat and wheat ear length. An intelligent controlled system had been developed. The system consisted of an intelligent agricultural machinery system, a field irrigation system, and an aerial pesticided application system. The intelligent agricultural machinery system was composed of three parts: the basic layer, decision-making layer, and application service layer. They were responsible for obtaining real-time status information of agricultural machinery, formulating management decisions for agricultural machinery, and executing operational commands, respectively. Additionally, appropriate agricultural machinery models and configuration references were provided. A refined irrigation scheme was designed based on the water requirements and soil conditions at different developmental stages of wheat. And, an irrigation control algorithm based on fuzzy PID was proposed. Finally, relying on technologies such as multi-source data fusion, distributed computing, and geographic information system (GIS), an intelligent management and control platform for the entire agricultural production process was established. [Results and Discussions] The digital perception network enabled precise sensing and networked transmission of environmental information within the farm. The data communication quality of the sensor network remained above 85%, effectively ensuring data transmission quality. The average relative error in extracting wheat spike length information based on deep learning algorithms was 1.24%. Through the coordinated operation of intelligent control system, the farm achieved lean and unmanned production management, enabling intelligent control throughout the entire production chain, which significantly reduced labor costs and improved the precision and efficiency of farm management. The irrigation model not only saved 20% of irrigation water but also increased the yield of "Jinan 17" and "Jimai 44" by 10.18% and 7%, respectively. Pesticide application through spraying drones reduced pesticide usage by 55%. The big data platform provided users with production guidance services such as meteorological disaster prediction, optimal sowing time, environmental prediction, and water and fertilizer management through intelligent scientific decision support, intelligent agricultural machinery operation, and producted quality and safety traceability modules, helping farmers manage their farms scientifically. [Conclusions] The study achieved comprehensive collection of environmental information within the farm, precise phenotypic analysis, and intelligent control of agricultural machinery, irrigation equipment, and other equipment. Additionally, it realized digital services for agricultural management through a big data platform. The development path of the "1.5-Ton grain per Mu" unmanned smart farm can provid references for the construction of smart agriculture.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}