



0 引 言
近年来,递归神经网络(Recurrent Neural Networks, RNN)[5]及其变体长短期记忆神经网络(Long Short-Term Memory, LSTM)[6, 7],以及门控单元(Gate Recurrent Unit, GRU)在处理复杂时间序列的任务中被广泛应用[8]。针对建筑能耗问题和现有室内温度预测研究的不足,FANG等[9]提出了一种基于LSTM的seq2seq模型架构,实现对建筑物不同区域的室内温度进行多步预测,该模型在48 h内的预测效果均优于对比模型。YANG等[10]结合LSTM捕捉非线性趋势和前馈注意力机制(Feed-Forward Attention Mechanism, FAM)提取关键信息的能力,提出了FAM-LSTM模型架构,在温室温度和湿度预测中可有效处理多变量时间序列数据,相比传统模型在预测精度上有了显著提升。
注意力机制的引入可以根据输入序列调整对不同输入的关注度,从而更好地表达输入的重要内容[13]。GUO等[14]将LSTM与时空注意力机制结合,在6、12、24 h水温预测中的均方根误差(Root Mean Squared Error, RMSE)均低于基准模型。张观山等[15]将LSTM与注意力机制结合,在12、24、48 h空气温度预测中决定系数最低为95%,均方根误差比LSTM降低了0.53。孟繁佳等[16]在SSA-LSTM的基础上引入注意力机制,温室内部温湿度的预测平均绝对百分比误差(Mean Absolute Percentage Error, MAPE)比祖林禄等[11]提出的SSA-LSTM分别低了0.3%和0.4%。
温室环境预测调参依赖人工经验,不能有效学习序列特征,本研究使用GWO优化模型参数,自动调参优化,避免人工调参误差。
1 数据与方法
1.1 实验区概况
实验地点在宁夏恒生育苗基地,实验温室为西北地区典型的双层膜日光温室。温室建筑尺寸为长69 m,宽8.8 m,后墙高3.5 m,屋脊高5 m。温室配备棉被、上下风口、冷热风机,以及喷湿设备进行温室环境调控。
1.2 数据采集
温室内环境控制设备(上下风口、棉被、喷湿、风机)历史操作状态,由团队人员通过自主研发的温室环境智能管控平台进行操作并记录,每个时间步对应的设备状态开启记为1,关闭记为0。为了真实反映育苗温室整体环境特征,布设了多点温湿度传感器,传感器参数见表1。
表1 温室数据采集传感器参数Table 1 Parameters of greenhouse data acquisition sensors |
| 数据类型 | 型号 | 量程 | 分辨率 | 数量 |
|---|---|---|---|---|
| 温度 | WQX-TH | -40~80 ℃ | 0.01 ℃ | 4 |
| 湿度 | WQX-TH | 0~100% RH | 0.01% RH | 4 |
| 光照强度 | WQX-L | 0~157 286 lux | 1 lux | 1 |
| 辐射强度 | WQX-R | 0~2 000 W/M2 | 1 W/M2 | 1 |
| 气象站 | FT-QCLF8 | / | / | 1 |
|
在温室上空垂直地面2.6 m处安装4个温湿度传感器、光照和辐射强度传感器各1个。温室内外环境因子通过团队自主研发的温室环境监测系统记录,数据每分钟上报一次。温室内部通过无线传感器采集温度、湿度、光照强度、辐射强度,温室外安装小型气象站采集室外温湿度、风速、风向、风力和降雨量等数据。实验选取温室某一批种苗从播种到出苗的完整生育期(2024年4月1日至4月26日,共37 381组)的数据。
1.3 数据处理
1.3.1 缺失数据填充
处理所采集数据前,需要对各传感器数据进行缺失值插补,具体填充策略如下:
短缺失段( )采用前向、后向或线性插值。
长缺失段( )使用动态时间规整(Dynamic Time Warping,DTW)算法通过寻找相似段进行填充[21]。
1.3.2 自适应卡尔曼滤波算法融合
针对同一特征多传感器数据的融合,常用方法(简单平均法、加权平均法)容易受异常传感器影响且动态适应性不足。卡尔曼滤波是一种基于状态空间模型的递归估计算法,它通过将系统的动态模型与观测数据结合,高效实现对系统状态的最优估计。该算法的核心是“预测”和“更新”两个步骤的迭代,通过协方差矩阵描述估计不确定性,从而得到最小均方误差意义下的最优状态估计[22]。本研究通过动态调整卡尔曼滤波器的过程噪声协方差(Q)、观测噪声协方差(R),并基于新息方差对各传感器权重进行动态分配,以实现在温室环境下的多传感器数据可靠融合。公式推导如下:
1)单传感器卡尔曼滤波。基于卡尔曼滤波的预测-更新框架,对每个传感器进行独立滤波,输出每个传感器估计值 和新息 。传感器新息反映了观测值与预测值之间的不一致性,定义为观测值 与预测值 的差,如公式(1) 所示。
式中:k只用于区分不同时间步。
2)自适应参数调整。观测噪声协方差 的自适应使用滑动窗口统计残差方差调整,如公式(2) 所示。
式中 为调节系数; 为窗口大小; 用来计算窗口内新息序列的方差。
过程噪声 的自适应基于状态变化的方差调整如公式(3) 所示。
式中 为调节系数;Q表示过程噪声, ; 和 为传感器当前和上一时间步的值。
3) 多传感器融合。动态权重分配:权重 的更新基于新息的方差,方差越小则权重越高,如公式(4) 所示。
式中 为防止除零的小量; 和 指不同传感器的新息; 为传感器 的权重; 为传感器数量。
加权融合各传感器的局部估计 ,如公式(5) 所示。
1.3.3 归一化
各类数据之间存在单位和量纲的差异,需要对数据进行归一化处理,采用Min-Max Normalization将数据集的每个特征映射到 区间内。
1.4 GWO-LSTM-Attention模型
1.4.1 长短期记忆网络
LSTM通过引入门控机制,使模型能够对历史信息进行有选择地保留与遗忘,从而有效地捕捉序列数据中的长期依赖关系,在一定程度上解决了RNN中普遍存在的梯度消失和梯度爆炸的问题[23]。LSTM的门控机制通过遗忘门、输入门和输出门控制信息的流动方式。遗忘门 决定哪些信息从记忆单元中丢弃(公式(6) ),输入门 控制新信息的存储(公式(7) ), 为候选单元状态(公式(8) ), 更新单元状态(公式(9) ),输出门 决定哪些信息从记忆单元输出(公式(10) 和公式(11) )。
式中: 表示当前时间步的输入; 表示当前时间步的隐藏状态; 分别表示遗忘门、输入门、候选细胞状态和输出门的权重矩阵; 分别对应各个门的偏置项。
1.4.2 注意力机制
在序列处理任务中,注意力机制可以通过计算输入序列中各元素的“重要性权重”,让模型动态地关注与当前输出相关性较高的信息,增强模型对长序列的建模能力,缓解传统循环神经网络(RNN/LSTM)的长距离依赖问题。
1.4.3 GWO-LSTM-Attention模型构建
1)模型基本层结构。本研究构建的模型包含5层,分别是输入层、LSTM层、Attention层、全连接层和输出层。模型结构如图1所示。
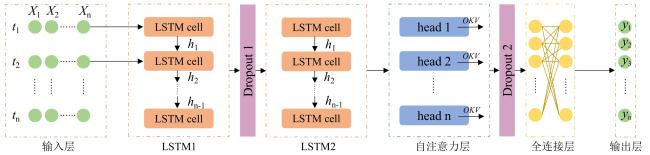
输入层:输入多维特征序列,输入层将输入数据转换为适合LSTM模型的三维格式。
LSTM层:包含LSTM1、Dropout、LSTM2(LSTM1和LSTM2隐藏单元数相同),Dropout层通过在训练过程中随机忽略部分神经元,可以有效提升模型的泛化能力,降低对特定训练样本的过度依赖,从而防止过拟合现象。
Self-attention层:捕捉全局依赖关系,通过计算输入序列中各元素的“重要性权重”,让模型动态地关注与当前输出相关性较高的信息,提升模型对长序列的建模能力。
全连接层:将LSTM层提取的特征进行整合、变换和降维。
输出层:接受来自全连接层的特征表示,并将其映射到预测序列上。
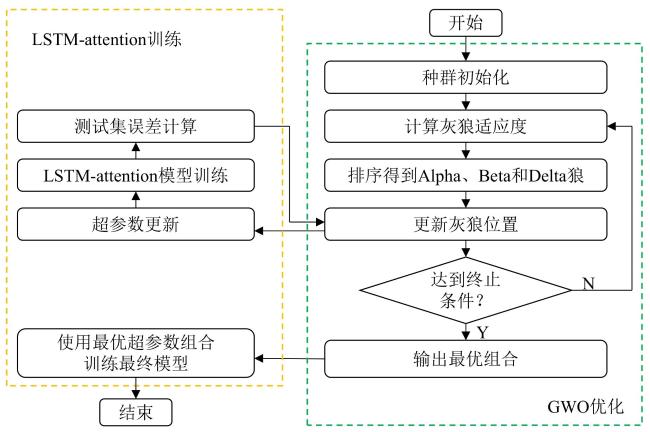
2)灰狼优化算法。由MIRJALILI等[24]于2014年提出。算法模拟了灰狼群体中严格的社会等级制度和高效的协作捕猎机制,该算法中,Alpha(最优)、Beta(次优)和Delta(第3优)狼引导Omega狼(候选解)进行搜索更新,在收敛速度、参数设置复杂度及实现的简便性方面都表现出一定优势[25]。本研究使用GWO对模型的学习率、批次大小、丢弃率和隐藏单元数进行参数优化,其寻优流程如图2所示。该流程首先初始化灰狼种群参数,包括种群大小、初始位置,以及全局最优位置。其次,通过排序适应度评估值选出Alpha、Beta和Delta狼。基于Alpha狼的位置信息,更新狼群中其他个体(即待优化的参数组合)的位置。若满足预设的终止条件(如达到最大迭代次数或精度要求),则输出当前最优参数组合;否则,继续迭代更新狼群位置。最后,利用获得的最优参数组合训练最终模型。
2 结果与分析
2.1 自适应卡尔曼滤波多源数据融合
表2 多传感器温湿度数据融合方法性能对比Table 2 Performance comparison of data fusion methods for temperature and humidity of multiple sensors |
| 融合方法 | 温度MAD/℃ | 湿度MAD/% | 温度r/% | 湿度r/% |
|---|---|---|---|---|
| 自适应卡尔曼 | 1.59 | 8.64 | 98.2 | 99.3 |
| 卡尔曼 | 1.61 | 9.45 | 93.5 | 95.0 |
| 简单平均 | 1.93 | 9.30 | 86.7 | 92.6 |
| 加权平均 | 1.92 | 9.21 | 86.6 | 92.9 |
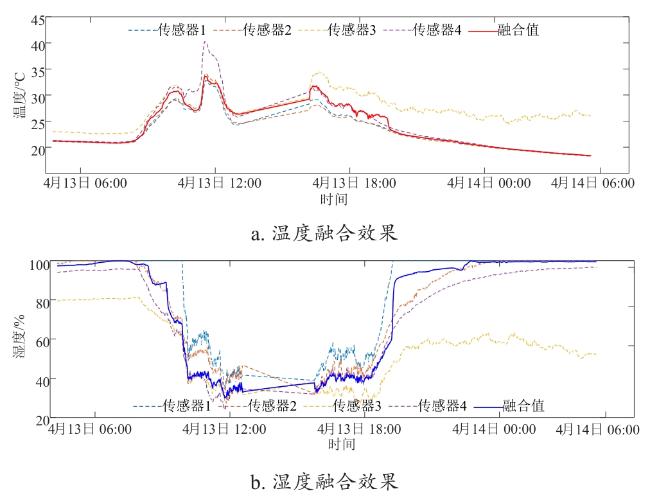
从表2的一致性统计结果可以看出,本研究提出的改进算法在融合精度上具有显著优势。在温度融合中,自适应卡尔曼算法取得1.59 ℃的MAD,比传统卡尔曼算法降低1.24%;湿度融合中取得8.64%的平均绝对偏差,降低8.57%。在模型训练中,以融合值为训练集,温湿度相关系数分别为98.2%和99.3%,比传统卡尔曼提升4.7和4.3个百分点。表明融合数据最大程度保留真实物理规律,为模型提供高置信度训练样本。
从融合值与实际值时序对比图来看,传感器3在图示时段与其他3个传感器的温湿度产生严重偏离。然而,融合值没有跟随异常传感器3的波动,而是与正常工作的传感器1、2、4保持一致,因此,融合值与异常传感器3的偏差较大,这说明算法成功抑制了传感器3的异常值影响。此外,融合曲线比单一传感器曲线更平滑,在平稳阶段始终保持在4个传感器的中间位置,说明算法能够有效降低随机噪声。
2.2 GWO-LSTM-Attention温湿度预测
2.2.1 特征变量分析
本研究数据集记录特征有室内温度、湿度、光照强度、辐射强度;室外温度、湿度、光照强度、辐射强度、风速;温室上风口、下风口、棉被状态。通过计算相关系数r(表3)评估变量之间的相关性。
表3 温室环境特征相关系数Table 3 Correlation coefficients related to greenhouse environmental characteristics |
| 环境因子 | 室内光照 | 室内辐射 | 室外温度 | 室外湿度 | 室外光照 | 室外辐射 | 风速 | 上风口 | 下风口 | 棉被 |
|---|---|---|---|---|---|---|---|---|---|---|
| 室内温度 | 0.734 6 | 0.740 8 | 0.859 3 | -0.667 8 | 0.793 9 | 0.805 8 | 0.363 6 | 0.706 9 | 0.687 6 | -0.133 2 |
| 室内湿度 | -0.693 0 | -0.708 0 | -0.767 2 | 0.678 2 | -0.698 6 | -0.714 8 | -0.458 9 | -0.621 2 | -0.585 8 | 0.117 1 |
从相关性分析来看,预选变量与室内温湿度基本都呈现极强相关性 ,棉被与室内温湿度之间呈现弱相关 。
2.2.2 模型训练及优化
本研究使用MATLAB R2024a编写代码进行模型训练。按照8∶1∶1的分配比例将数据集划分成训练集、验证集和测试集,优化器选择Adam。
通过对比迭代次数10、20、30的优化效果,发现20次迭代内已稳定收敛。因此,将灰狼种群大小设置为10,寻优过程的最大迭代次数为20,以温湿度的RMSE之和为适应度,分别对学习率、批次大小、隐藏单元数和丢弃率进行寻优。最终在第17次迭代达到最优适应度,此时的超参数分别为0.000 411 79、237、244、0.427 71。
2.2.3 预测效果分析
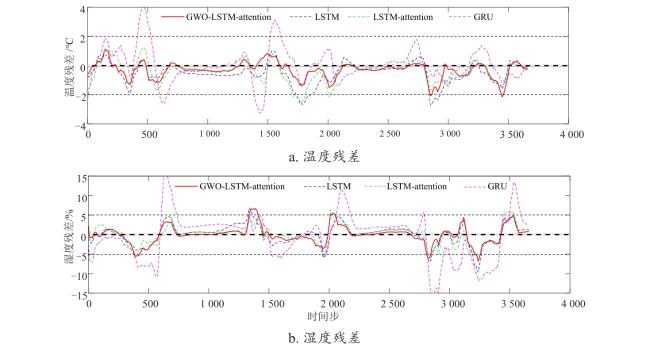
表4 各模型性能对比Table 4 Performance comparison of various models |
| 对比模型 | 温度 | 湿度 | ||||
|---|---|---|---|---|---|---|
| RMSE | MAE | R 2 | RMSE | MAE | R 2 | |
| LSTM | 0.920 9 | 0.646 0 | 0.982 4 | 2.906 5 | 1.892 3 | 0.993 2 |
| GRU | 1.345 7 | 1.190 9 | 0.949 0 | 4.653 5 | 4.188 1 | 0.965 9 |
| LSTM-attention | 0.832 0 | 0.767 9 | 0.977 4 | 2.182 0 | 1.942 5 | 0.993 4 |
| GWO-LSTM-Attention | 0.776 8 | 0.549 8 | 0.987 5 | 2.056 4 | 1.811 0 | 0.994 7 |
由表4可知,预测温度的RMSE(0.776 8 ℃)、MAE(0.549 8 ℃)和R 2(0.987 5)均为最优,其中,RMSE比对比模型LSTM和LSTM-attention分别降低了15.6%和6.6%;预测湿度的RMSE(2.056 4%)、MAE(1.811 0%)和R 2(0.994 7)同样最优,RMSE较对比模型分别降低了29.2%和5.7%,证明灰狼优化算法有效提升了模型精度与泛化能力。在基础模型中,LSTM在温度预测上表现较好(RMSE 0.920 9 ℃,MAE 0.646 0 ℃),GRU表现最差(如湿度MAE达4.188 1%),说明LSTM结构更适应该任务;通过对比LSTM与LSTM-Attention的指标,可以发现温湿度的MAE都有了轻微上升。但从整体来看,注意力机制带来了更积极的效果:温度RMSE降低9.7%,湿度RMSE降低25%,同时决定系数R 2保持稳定。MAE和RMSE对误差的敏感性不同,RMSE的显著降低表明注意力机制的加入有效减少了模型对温湿度极端值的预测偏差。
由图4残差曲线来看,LSTM与GRU残差波动很大,容易受异常数据影响,而LSTM-attention的残差范围相比LSTM更小,说明注意力机制有效降低了异常波动对LSTM预测的影响。经GWO对模型参数进行优化后,GWO-LSTM-Attention的温湿度残差分布范围更密集,温度波动保持在[-2,2],湿度保持在[-5,5]。相比其他模型,波动幅度更小,说明预测稳定性与精度优于其他模型,经过GWO参数调优模型拟合精度更高、平稳性更好。
3 结 论
本研究提出自适应卡尔曼滤波算法,通过动态调整Q、R,并基于新息方差动态分配传感器权重,旨在克服传统温室多传感器融合算法易受噪声干扰、可靠性不足的缺陷。实验表明,融合后温湿度数据的MAD分别为1.59 ℃和8.64%,较传统卡尔曼滤波的温湿度误差分别降低1.24%和8.57%。以融合数据作为训练集构建模型,模型对温湿度的R 2分别达98.2%和99.3%,较传统卡尔曼算法提升4.7和4.3个百分点,说明该算法能有效抑制融合过程中的异常数据干扰,为模型训练提供高可靠性数据基础。
针对温室环境因子存在的强耦合性、时滞性、非线性,以及温湿度调控需协调的需求,本研究构建了基于注意力机制的多输出LSTM模型。该模型以温湿度协同预测为目标,通过注意力机制自适应加权关键环境因子,精准捕捉变量间动态交互关系;为了解决人工调参的不确定性问题,进一步引入GWO自动寻优超参数。优化后的GWO-LSTM-Attention模型表现出优异的稳定性与预测精度:温湿度RMSE分别达到0.776 8 ℃和2.056 4%,比基础LSTM-attention模型分别降低6.6%和5.7%,证明GWO在提升模型泛化能力与收敛效率中的关键作用。
本研究通过结合自适应卡尔曼滤波算法与GWO-LSTM-Attention,解决了温室环境监测与预测中的关键问题。其中,自适应卡尔曼滤波算法通过动态噪声协方差调整和新息驱动权重分配机制显著提升了数据融合质量,为多源异构传感器网络提供了可靠的融合框架。基于GWO-LSTM-Attention模型的多目标协同预测结构,实现变量间动态交互的精准建模,可在后续研究中为温室环境调控提供高精度预测工具。在后续的研究中将继续收集跨季节、覆盖全年的温室环境数据,对算法的鲁棒性与模型的泛化能力进行更全面和深入的验证。同时,将进一步推进预测模型在实际温室协同控制系统中的应用部署,验证其在实际生产环境中的有效性与经济性,明确其应用价值,为构建节能高效的智能温室调控系统提供理论支持与实践方向。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}