



0 引 言
为应对复杂的调度与规划问题,学术界广泛采用智能优化算法,尤其是遗传算法[4]、蚁群算法[5]、粒子群算法[6]、模拟退火算法[7]与禁忌搜索算法[8]等元启发式方法,展现出良好的适应性和鲁棒性。已有研究主要集中在农业机械的任务分配与调度优化方面。例如,CAO等[9]开展了基于改进蚁群算法的任务分配研究,能有效降低路径成本。王猛等[10]提出了基于多变异遗传算法的多机协同静态任务分配方法,在不同权重下任务分配的机群代价比实际作业降低29.48%~55.00%。ZHU等[11]提出一种混沌-柯西烟花算法解决施肥机多机协同作业问题,方差降低了48%以上。郭亚倩等[12]以农机作业转移距离最短、调度总成本最低为目标,建立多机多目标跨区协同作业调度模型,设计基于优先级策略的多目标自适应优化调度算法,作业转移距离和调度总成本分别下降23.60%和13.72%。SEYYEDHASANI和DVORAK[13, 14]考虑了多辆农机协同作业的情况,使用改进的Clarke-Wright算法和禁忌搜索算法,将农机调度问题转换为车辆调度问题。TUANI等[15]基于旅行商问题,提出了局部搜索的自适应蚁群优化,实现了在优化搜索过程中使参数接近最佳值。SETHANAN和NEUNGMATCHA[16]提出改进粒子群优化算法解决甘蔗收获机路径规划问题。CERDEIRA等[17]采用禁忌搜索和模拟退火相结合的算法对青贮收获机的作业路径进行了优化,表现出稳定的性能。此外,部分学者针对田块内部路径规划问题[18]展开了相关研究。罗承铭等[19]提出了两套完整的针对任意四边形边界田块的油菜联合收获全覆盖作业路径规划算法,混合路径的运行效果优于传统路径。ZHANG等[20]使用往复法遍历工作行,为收割机实现全覆盖路径规划算法(Complete Coverage Path Planning, CCPP)。ZHOU等[21]解决了室内清洁机器人无障碍路径规划和避让的挑战。他们使用网格方法构建环境地图模型,并采用跟随边缘的内螺旋算法进行有效的路径规划。尽管已有大量研究在多机调度与路径规划方面提出了有效方法,但仍存在局限性,如任务负载均衡未得到充分考虑,导致作业单元分配不均,进而影响整体效率与资源利用率。
针对上述不足,本研究以多旅行商问题为理论框架,聚焦农田收获作业环节,构建了面向收割机协同作业调度与路径规划的方法。在综合考虑农机负载均衡和时间窗等约束条件下,旨在最小化收割机的总作业时间。本研究的主要创新点为:在种群初始化阶段,引入顺序初始化与随机初始化相结合的策略,以兼顾初始解质量和种群多样性。在遗传算法的变异环节中引入Q-learning,通过对个体适应度变化趋势的状态建模及奖励反馈,实现对变异算子的自适应选择,有效增强了搜索性能和收敛能力。为此,本研究提出一种改进型多旅行商遗传算法(Improved Multi-traveling Salesman Problem Genetic Algorithm, IMTSP_GA),旨在提升全局搜索与局部优化能力,克服传统遗传算法易早熟收敛与局部搜索不足的缺陷。在优化后调度结果的基础上,进一步完成各收割机的全流程路径规划,实现高效有序的收割作业安排。
1 收割机协同调度模型的构建
1.1 问题描述
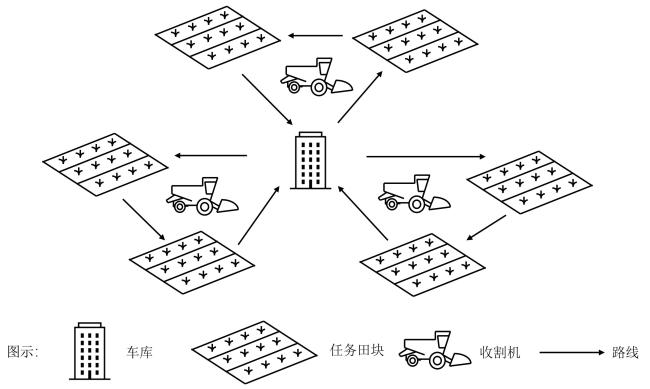
多块田块需要进行收割,农场有多台收割机可用于收割作业,将田块分别分配给不同收割机作业并给出其作业顺序。多台收割机从车库出发,按指定作业路线对分配到的田块进行收割作业,作业完成后回到车库。示意图如图1所示。
考虑天气因素、作物的成熟度和质量,必须在一定时间内完成收割任务,因此,需要确定收割机数量。同时,收割机也不能长时间持续不断作业,若继续完成下一田块作业任务将超出每天的工作时间时,收割机完成当前任务后会回到车库,次日继续作业。
由多台收割机对多块田块进行收割作业,目标是使所有收割机的总作业时间最短,根据已有的收割机与田块信息,最终得到收割调度方案。
由于田间作业环境复杂多变,为便于模型计算,本研究定义了收割机调度问题的基本假设如下:
1)本研究所研究的田块形状基本为规则矩形。在部分田块内部存在不可跨越的沟渠障碍,收割机无法直接通过。对此,本研究采用划分处理:将原始田块沿沟渠位置划分为两个独立且规则的子田块,每一子田块作为一个独立的任务单元,由单台收割机独立完成作业。划分后的子田块仍保持规则形状,并确保作业全覆盖、不出现漏割现象。
2)所有田块的位置、车库的位置及各收割机的作业性能参数(如幅宽、速度等)为已知信息。
3)收割机每天工作时间不得超过规定时间。
4)所有收割机均从同一车库出发,完成分配作业后或按规定工作返回车库。
5)所有收割机都携带充足的燃料完成作业任务,无需考虑燃料消耗。
1.2 多收割机调度模型
1.2.1 变量描述
与田块相关的变量包括任务单元 ,其中田块数量为 ;任务单元数量为 ;任务单元编号为 。
与收割机相关的变量包括收割机集合为 ,其中收割机数量为 ;收割机编号为 ;转移速度为 , ;收割速度为 ;作业宽度为 , 。
定义 , , , 为决策变量:
1.2.2 目标函数
该模型旨在最小化收割机的总作业时间,以提高整体作业效率。每台收割机的作业时间主要由收割机在路上的时间和在田块的时间两部分构成,如公式(1) 和公式(2) 所示。
式中: , , 表示收割机 在路上的时间; 表示收割机 在田块的时间; 表示收割机的总作业时间。
收割机在路上的时间包括从车库出发至其第1个任务单元的初始转移时间,在多个任务单元之间的连续转移时间总和,从最后一个任务单元返回车库的结束转移时间,如公式(3)~公式(5) 所示。
式中: 表示收割机从车库到第1个任务单元入口的距离; 表示收割机从最后一个任务单元返回车库的距离; 表示两个任务单元之间的距离。
收割机在田块的时间包括田内收割的时间和从作业结束位置返回到田块入口点的时间,如公式(6) 和公式(7) 所示。
式中: 收割机 在任务单元 的轨迹点个数; 表示第 个轨迹点; 表示从作业结束位置返回任务单元 入口点的距离; 为收割机 在任务单元 的时间。
1.2.3 约束条件
约束条件如公式(8)~公式(11) 所示。
式中:公式(8) 与公式(9) 表示车库的出度和入度都必须是 ,即代表 台收割机从车库出发并且完成行程后回到了车库。公式(10) 与公式(11) 则表示除车库外的其他所有任务的出度和入度均为1,即每个任务只能被1台收割机作业。 表示任务的收割时间窗口必须满足的条件,其中, 为地块 的最早收割时间; 为地块 的最晚收割时间; 为地块 的开始收割时间。
2 收割机的协同调度算法
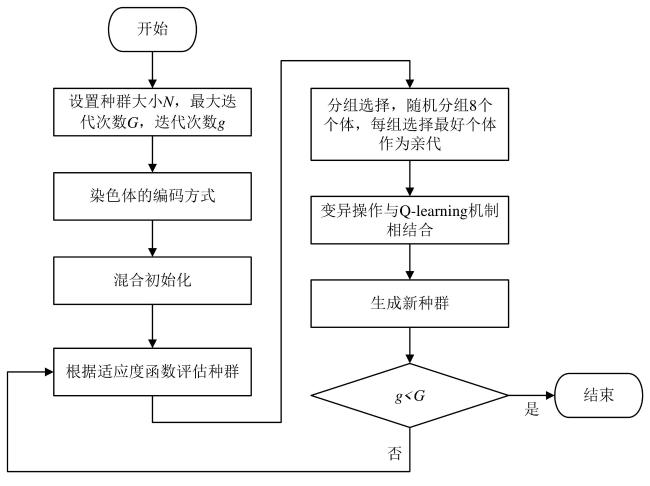
为解决区域内多台收割机协同作业过程中的调度优化问题,本研究提出了一种IMTSP_GA调度方法。该方法在考虑了农机负载均衡和时间窗等约束条件的基础上,旨在最小化收割机的总作业时间,从而实现作业效率的优化。具体算法流程如图2所示。
2.1 染色体的编码方式
本研究采用的两部分染色体编码中[22]:第1部分为所有任务单元的排列序列;第2部分用于确定该序列的分割方式,从而生成多台收割机的作业路径。
具体而言,假设有3台收割机,任务单元数量为9。为便于表示,任务单元按照自然数 编号。在染色体编码中:第1部分为任务编号的一种排列,如图第1部分为 ;第2部分为两个分割点的位置,如图第2部分为 ;用于将第1部分划分为3段,则得到子序列 , , ,分别分配给3台收割机执行,即3台收割机的作业顺序分别为:0→7→4→6→0,0→2→5→1→0,0→9→3→8→0,其中0为车库,即所有收割机的起点和终点。如图3所示。
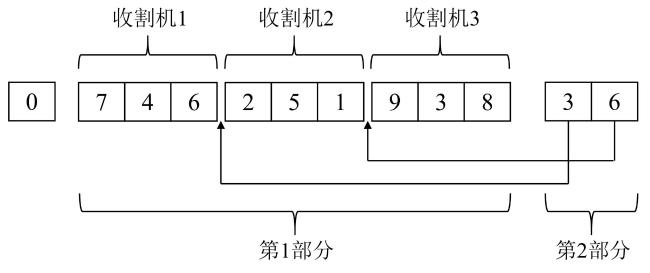
通过将第2部分编码简化为分割点位置而非机器编号,不仅减少了染色体长度,提高了编码的紧凑性,也更有利于保持任务顺序信息,实现灵活高效的个体解,构建多机任务划分。
2.2 混合初始化
在传统遗传算法中,染色体的编码方式是通过随机初始化的方式产生的,这一方法在实际优化问题中造成初始解质量差、种群多样性低、早熟收敛等问题。顺序初始化按距离矩阵节点升序排列,构建一个完整的访问顺序。本研究采用随机初始化和顺序初始化相结合的方法,每8个个体中选择1个个体进行顺序初始化,其余进行随机初始化,可以提高算法的初期搜索效率和增加种群多样性。
2.3 适应度函数
依据公式(1)~公式(2) ,适应度值直接计算为收割机的总作业时间。总作业时间越小,说明任务在多机之间分配得更加均衡,个体的适应度值就越高。这样的设计不仅保证了算法优化目标与实际生产需求的统一性,而且避免了仅追求单台收割机最优而导致整体调度效率下降的问题,从而使适应度评价更符合多机协同作业的特征。
2.4 分组选择
在每次选择时,从种群中随机抽取8个个体,然后从这8个个体中选出适应度最好的作为亲代。重复这一过程,直到选出所需的亲代。
2.5 基于Q-learning的自适应变异机制
为了提高遗传算法在求解多旅行商路径规划问题中的局部搜索能力与收敛效率,本研究在标准遗传算法框架下引入了强化学习中的Q-learning方法,用于控制变异操作的选择与执行。该机制通过学习个体适应度的变化趋势,实现了基于反馈的变异算子动态选择,从而在保持种群多样性的同时提升搜索方向性。
2.5.1 变异操作设计
针对染色体中路径编码(Route)与断点编码(Break Point)两类信息,本研究设计了8种变异操作[23],具体如下:
1)恒等操作:保持个体不变,不进行任务变异操作。
2)区间反转:在染色体上随机选取1个区间,将该区间内的基因顺序翻转。
3)基因交换:随机选择两个基因,交换它们的位置。
4)左旋操作:随机选择染色体的1个位置,将该位置及其后续的基因整体左移若干位。
5)随机断点生成:重新随机生成第2部分的分割点结构。
6)区间反转加随机断点:重新随机生成第2部分的分割点序列和在染色体上随机选取1个区间,将该区间内的基因顺序翻转。
7)基因交换加随机断点:重新随机生成第2部分的分割点序列和随机选择两个基因,交换它们的位置。
8)左旋操作加随机断点:重新随机生成第2部分的分割点序列和随机选择染色体的1个位置,将该位置及其后续的基因整体左移若干位。
上述操作确保了染色体结构的可行性,并兼顾了局部扰动与全局调整能力。
2.5.2 状态空间建模
每一代遗传迭代中,针对适应度函数值的变化趋势构造离散状态空间。状态定义如下:当前个体适应度优于上一代最优个体(改善);当前适应度劣于上一代(恶化);当前适应度与上一代相同(停滞)。状态由如下函数确定,见公式(13) 。
式中 为前一代最优个体的适应度值; 为当前代最优个体的适应度值; 为当前状态。
2.5.3 动作选择策略
在每代迭代中,Q-learning控制器依据当前状态选择1个动作作为变异操作。使用贪婪策略实现探索与利用的平衡,如公式(14) 所示。
式中: 为探索概率; 为在当前状态 下选择的动作; 为状态 下可能采取的所有动作; 为在状态 下采取 的 值。
2.5.4 Q值更新机制
执行变异操作后,评估新个体适应度并计算奖励值,如公式(15) 所示。
式中:r为当前行动带来的即时奖励。
Q值更新按照Q-learning计算方法进行,如式(16) 所示。
式中: 为学习率; 为折扣因子; 为在新状态 下所有可选动作 中,预期累计收益最大的 值; 为当前状态 和动作 的 值。
3 收割机的全流程路径规划
收割机的全流程路径规划分为两个阶段:田间路径规划阶段和道路路径规划阶段。在本研究中,为了解决收割机的全流程路径规划问题,田间路径规划阶段主要采用了内部螺旋的路径规划方法,而道路路径规划阶段主要使用Dijkstra算法。
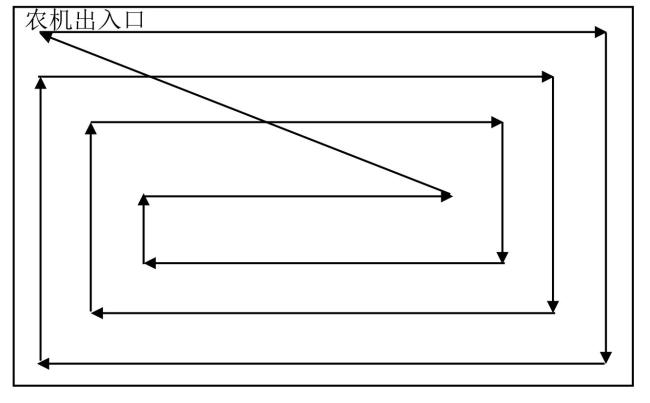
3.1 田间路径规划阶段
1)输入:田块边界坐标、作业幅宽、作业起点位置。
2)约束条件:作业幅宽固定,路径必须实现对田块区域的完整覆盖;收割机的行驶方向需与田块边界对齐,转弯半径受限;作业完成后,收割机需从作业结束位置返回田块入口。
3)输出:收割机在田间的完整作业路径序列(包含覆盖路径与返回路径),如图4所示。
3.2 道路路径规划阶段
道路路径规划旨在根据预先分配的任务序列,确定收割机在各任务单元之间的最优行驶路线。本研究采用Dijkstra算法,其优势在于能够保证全局最优性,并且算法成熟稳定。
1)输入:道路网络拓扑(节点表示车库、田块入口与道路交叉点,边表示道路及其长度)、任务序列。
2)约束条件:道路权重为行驶距离;行驶路径必须满足道路通行性约束,不可通行道路被剔除。
3)输出:车库到第1个任务单元的最短路径;各任务单元之间的最短路径;最后1个任务单元返回车库的最短路径。
4 仿真测试
4.1 试验数据
4.1.1 实验场景构建
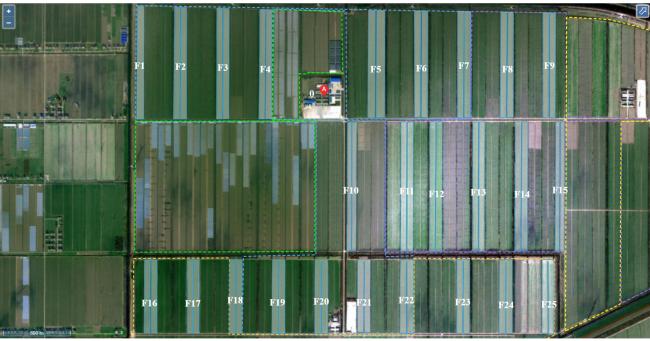
为验证所提方法的实用性与有效性,本研究以实际农场的地理信息数据和农业机械作业参数为基础,构建仿真测试场景。考虑到作物成熟度、收割时间窗及天气等约束,需要在限定时间内完成全部收割任务。选取江苏省某智慧农场系统中的25块实际农田作为研究对象。由于部分农田内部存在沟渠、水渠等自然障碍物,直接影响作业路径规划与连续性,因此对原始田块进行划分,最终形成49个可独立作业的任务单元。基于上述信息构建的仿真作业场景如图5所示,F1~F25为任务田块,0为车库。
4.1.2 数据与机械参数说明
表1 约翰迪尔3588型收割机性能参数Table 1 Performance parameters of the John Deere 3588 combine harvester |
| 收割机编号 | 作业幅宽/ | 转移速度/(m/h | 收割速度/(m/h |
|---|---|---|---|
| H1 | 4 | 6 000 | 3 000 |
| H2 | 4 | 6 000 | 3 000 |
| H3 | 4 | 6 000 | 3 000 |
| H4 | 4 | 6 000 | 3 000 |
表2 仿真场景中的任务田块信息Table 2 Task field information in the simulation scenario |
| 农田编号 | 任务单元编号 | 入口点经度(东经) | 入口点纬度(北纬) | 面积/ |
|---|---|---|---|---|
| F1 | 1 | 120.677 561 | 33.075 832 | 45 333.33 |
| F2 | 2 | 120.679 760 | 33.077 584 | 75 333.33 |
| 3 | 120.680 436 | 33.080 126 | ||
| …… | …… | …… | …… | …… |
| F12 | 22 | 120.704 974 | 33.081 253 | 89 333.33 |
| 23 | 120.705 374 | 33.081 589 | ||
| …… | …… | …… | …… | …… |
| F25 | 48 | 120.719 615 | 33.079 558 | 48 666.67 |
| 49 | 120.720 271 | 33.080 077 |
4.1.3 实验运行环境
运行环境处理器为AMD Ryzen 77840 H w/Radeon 780 M Graphics 3.80 GHz,操作系统为Windows11,采用Matlab编程软件求解。
4.2 结果与分析
为评估本研究所提出的改进型IMTSP_GA的性能,设计了多种智能优化算法的对比实验。
1)对比算法选择。本研究选取标准遗传算法(Genetic Algorithm, GA)、粒子群优化算法(Particle Swarm Optimization, PSO)、蚁群算法(Ant Colony Optimization, ACO)作为对照。GA与PSO作为经典代表,广泛应用于组合优化与路径规划问题;ACO适合处理离散路径优化问题。
2)参数设置与说明。为确保公平性,各算法的参数均参考已有文献并结合预实验调优结果设定。GA与IMTSP_GA:种群规模80,交叉概率0.9,变异概率0.1。PSO:粒子数量50,惯性权重0.7,学习因子1.5。ACO:蚂蚁数量50,信息素挥发系数0.5,启发式因子2;所有算法最大迭代次数均设为500,以保证可比性。
3)实验重复与统计方法。为验证本研究中所提出的IMTSP_GA算法对收割机协同调度问题的求解能力,对算法各进行20次运算,分别对其4项指标:平均值、最优解、标准差、平均运行时间进行统计分析。
表3 IMTSP_GA、GA、PSO、ACO算法对比结果Table 3 Comparison results of IMTSP_GA, GA, PSO, and ACO algorithms |
| 算法 | 平均值 | 最优解 | 标准差 | 平均运行时间 |
|---|---|---|---|---|
| IMTSP_GA | 14.06 | 14.01 | 0.025 | 5.82 |
| GA | 14.72 | 14.65 | 0.048 | 11.55 |
| PSO | 14.85 | 14.78 | 0.041 | 10.70 |
| ACO | 15.60 | 15.11 | 0.173 | 8.71 |
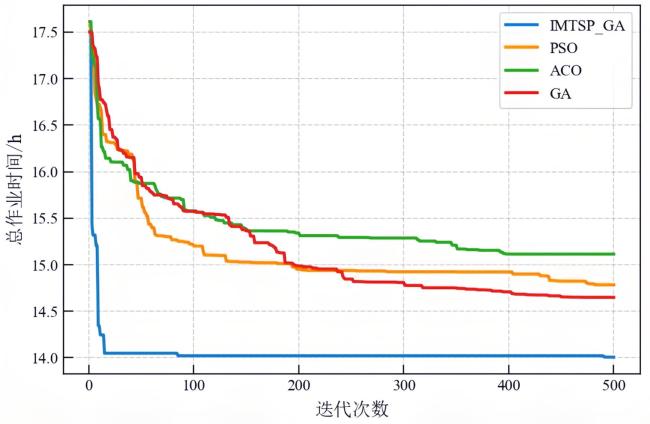
从表3和图6可以看出IMTSP_GA、GA、PSO、ACO的平均值分别为14.06、14.72、14.85、15.60 h,迭代次数分别为85、403、404、351时逼近最优解,平均运行时间分别为5.82、11.55、10.70、8.71 s。1)解的质量。在总作业时间上,IMTSP_GA优于GA、PSO和ACO,能够有效缩短整体作业完成时间。其中,相比GA减少4.48%,相比PSO减少5.32%,相比ACO减少9.87%。2)收敛性能。从进化过程示意图可以看出,IMTSP_GA在前期收敛速度较快,能够在较少迭代次数内逼近最优解,避免陷入早熟收敛。整体来看,IMTSP_GA在收敛速度方面表现更优。3)运行效率。在运行时间上,IMTSP_GA的平均运行时间为5.82 s,显著短于GA和PSO,效率优势明显。ACO的运行时间为8.71 s,处于中间水平。
综合考虑解的质量、收敛性能与运行效率,IMTSP_GA在各方面均表现最优,体现了较强的综合优势。
4.3 多种数据集实验
使用5个经典的旅行商问题(Traveling Salesman Problem)数据集来验证所提出算法的泛化能力(不考虑在田块的时间),这5个数据集分别为Berlin52、Eil76、Bier127、CH150和KroB200。这些数据集代表了不同规模和复杂度的TSP实例,以此来评估算法的效果。
为了确保实验结果的可靠性,每个算法将在每个数据集上执行20次,得到每次运行的解和运行时间,如表4所示。
表4 多机协同调度研究的多种数据集实验对比Table 4 Experimental comparison of multiple datasets in multi-machine collaborative scheduling research |
| 数据集 | 算法 | 平均值 | 平均运行时间 |
|---|---|---|---|
| Berlin52 | IMTSP_GA | 0.51 | 8.16 |
| GA | 0.62 | 10.31 | |
| PSO | 0.63 | 10.41 | |
| ACO | 0.66 | 8.73 | |
| Eil76 | IMTSP_GA | 0.041 | 9.87 |
| GA | 0.052 | 11.18 | |
| PSO | 0.055 | 10.42 | |
| ACO | 0.064 | 10.16 | |
| Bier127 | IMTSP_GA | 12.45 | 13.62 |
| GA | 14.89 | 17.66 | |
| PSO | 14.67 | 18.36 | |
| ACO | 17.69 | 14.35 | |
| CH150 | IMTSP_GA | 1.07 | 14.13 |
| GA | 1.16 | 19.47 | |
| PSO | 1.18 | 20.50 | |
| ACO | 1.55 | 15.65 | |
| KroB200 | IMTSP_GA | 6.64 | 20.67 |
| GA | 7.54 | 29.00 | |
| PSO | 7.43 | 29.78 | |
| ACO | 8.62 | 22.34 |
总体来看,IMTSP_GA算法在平均值和平均运行时间上均优于GA、PSO、ACO算法,能够在更短的时间内找到较优解,表现出了较为优异的性能。
4.4 收割机全流程路径规划的仿真测试
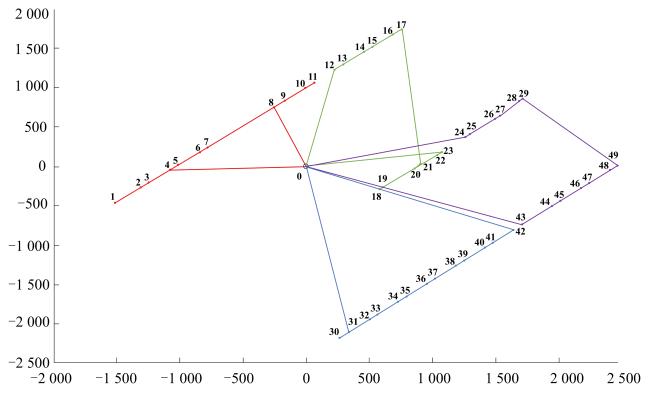
图7 仿真场景中收割机协同调度的作业调度路线图 Fig. 7 Operational scheduling route map of combine harvester collaborative scheduling in the simulation scenario |
表5 仿真场景中收割机协同调度的作业调度路线Table 5 Operational scheduling route of combine harvester collaborative scheduling in the simulation scenario |
| 收割机编号 | 调度结果(编号为任务单元编号) |
|---|---|
| H1 | 0→4→1→3→2→6→7→5→9→10→11→8→0 |
| H2 | 0→31→30→32→33→34→35→36→37→38→39→40→41→42→0 |
| H3 | 0→24→25→26→27→28→29→49→48→47→46→45→44→43→0 |
| H4 | 0→23→22→18→19→20→21→17→16→15→14→13→12→0 |

5 结 论
本研究提出了一种基于IMTSP_GA的收割机多机协同作业调度与规划方法。通过江苏省某农场的仿真验证,结果表明该算法在解的质量、收敛性能和运行效率方面均优于对比算法,在总作业时间上,相比GA、PSO和ACO分别减少了4.48%,5.32%,9.87%。在收敛性能上,在收敛速度方面表现更优。同时,运行时间明显低于其余算法,验证了其在调度中的适用性。
本研究尚未涉及更加复杂的作业情境,如多区域协同作业、作业任务优先级设置,以及动态环境下的调度调整。未来的研究将重点考虑以下方面,针对多区域协同问题,引入分区划分与区域负载均衡策略;在任务优先级约束下,构建多目标优化模型,探索任务排序与路径规划的协同优化;针对动态调度场景,引入强化学习或在线优化机制,实现对突发情况的实时响应与调整。通过上述扩展,所提出的方法有望进一步提升在复杂农机协同作业中的适应性与应用价值。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}