



0 引 言
油菜是中国重要的油料作物。冬油菜在农业生产中,因种植具有错峰优势,且长江流域冬闲田面积高达6.66万平方千米,发展潜力巨大[1]。油菜无人农场的本质是利用智能化设备实现油菜生产效率和质量的提高。油菜无人播种作业系统是油菜无人农场的重要组成部分。油菜无人播种作业技术可以有效减轻农机驾驶员的劳动强度,保证机具在复杂环境田块内仍具有较高的对行准确度及直线行驶精度。
在田块信息已知情况下进行全覆盖路径规划有助于提高无人农机作业效率及作业覆盖率[2, 3]。目前基于全覆盖路径的无人播种作业系统主要采用的是套行法和梭行法。Wang和Noguchi[4, 5]提出了一种适用于轮式拖拉机的转弯调头算法,实现了轮式拖拉机在田间的梭行作业。Yin等[6]考虑水稻插秧机在极端转向角下具有较小的转弯半径和相对较大的滑移率,提出了一种地头转弯调头控制方法,实现了水稻插秧机在田间的梭行作业。Ma等[7]整合卫星定位和视觉导航开发了一套控制系统,采用AB线模式,实现了对水稻作物行的稳定跟踪。He等[8]建立了基于姿态修正的农业机械运动学模型,采用模型预测控制,提高了稻田农业机械在发生侧滑时的控制精度。Li等[9]提出了一种模糊自适应有限脉冲响应卡尔曼滤波算法融合卫星定位系统和惯性测量单元,提高了农业机械导航控制精度。Jing等[10]开发了一套基于卫星定位和惯性测量单元的自动导航土地平整系统,实现了套行高精度平地作业。吴才聪等[11]以动力换向线控底盘拖拉机为平台,挂载深松机进行套行无人作业。张朝宇等[12]以油菜直播机组为试验平台,提出了一种两退三切鱼尾调头模型,进行田间梭行作业,提高了鱼尾调头方式的对行精度,减小了鱼尾调头方式的漏作业面积。刘兆朋等[13]采用梭行的作业形式,开发了一套自动导航作业系统,实现了喷雾机在田间自动喷雾作业。
目前无人作业系统的田块边界信息获取还是以人工打点方式为主,路径规划方法主要采用梭行法及套行法,这些方式适用于单一大面积田块作业。而在南方冬油菜种植产区,土壤含水率高,常常会出现黏重板结现象,且前茬秸秆量较大,地块面积相对较小[14]。当无人播种作业装备连续作业多块田地时会产生转场效率低的问题;且对于南方中小田块,转弯半径较大的轮式拖拉机在田间进行套行和梭行作业时会在转弯调头处留下较大的漏作业区域。目前针对上述两个问题的相关研究较少。
本研究以Case TM1404型拖拉机搭载智能播种施肥一体机为试验平台构建了一套基于云-端高精度地图的油菜无人播种作业系统。为实现油菜播种无人化、信息化和智能化,针对油菜无人播种转场作业效率低的问题,提出“无人机构建高精度地图+远程网页端规划作业路径”方法,通过无人机重构高精度地图,人工框选田块获取边界信息并自动生成作业路径。针对漏作业率高的问题,依据几何学和运动学,为田块边角设计一退两切转弯模型。为验证高精度地图及梭行外螺旋路径应用于油菜无人播种作业的可行性,开展梭行外螺旋全覆盖路径与梭行、套行路径作业面积和作业覆盖率对比仿真试验,以及地图精度和梭行外螺旋路径无人播种田间试验。
1 油菜无人播种作业系统设计
1.1 作业系统整体结构
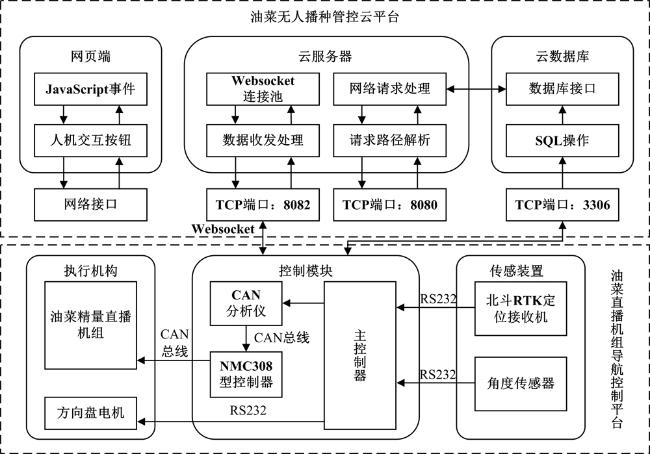
油菜无人播种作业系统主要包括油菜无人播种管控云平台和油菜直播机组导航控制平台。其中管控云平台主要由云数据库、云服务器和网页端组成。油菜直播机组导航控制平台主要包括传感装置、控制模块和执行机构。系统整体结构如图1所示。
1.2 管控云平台功能设计
为提升油菜无人播种作业系统转场效率,本研究搭建可实现如下功能的管控云平台:在云端基于高精度地图人工选定田块,并自动生成路径,可一键启动油菜直播机组完成无人作业,并将播种轨迹信息实时存储到云数据库中。
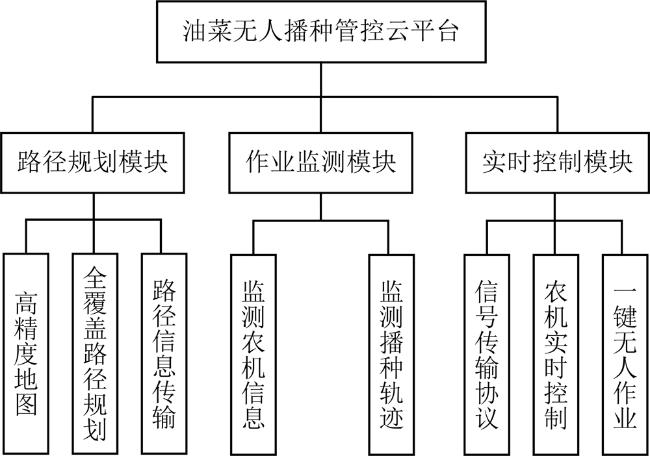
管控云平台主要由路径规划模块、作业监测模块以及实时控制模块组成,如图2所示。
1.2.1 路径规划模块
路径规划是实现油菜无人播种作业的前提。通过人为在网页端高精度地图选取作业田块,一键自动生成梭行外螺旋全覆盖作业路径并上传到云数据库中,上传的路径信息格式如表1所示,供导航控制终端读取。
表1 油菜无人播种作业路径信息表Table 1 Path information sheet of rapeseed unmanned seeding operation |
| 字段名 | 数据类型 | 数据含义 |
|---|---|---|
| id | int(10) | 唯一标识符 |
| latitude | decimal(10) | 纬度 |
| longitude | decimal(10) | 经度 |
| type | int(1) | 边界为0,规划为1,点选为2 |
| device_id | varchar(20) | 拖拉机编号 |
1.2.2 作业监测模块
农机作业监测模块监测的主要信息如表2所示,包括生成时间、纬度、经度、速度及横向偏差。
表2 无人农机作业监测信息表Table 2 Monitoring information sheet for unmanned agricultural machinery operation |
| 数据名称 | 数据类型 | 数据含义 |
|---|---|---|
| time | string | 生成时间 |
| latitude | double | 纬度 |
| longitude | double | 经度 |
| speed | double | 速度 |
| deviation | double | 横向偏差 |
导航控制终端收到农机监测数据后将其存储至云数据库农机作业监测信息表中,并发送至网页端进行实时显示。
1.2.3 实时控制模块
考虑油菜无人播种未来实现多机协同控制的现实要求,云平台需要能够控制多台农机,作为人机交互页面的网页通过WebSocket协议发送控制指令至云服务器,云服务器通过识别农机ID将控制指令转发至对应农机实现远程控制,无人播种农机具、无人耕整地农机具等无人作业农机具通过云平台与网页的信息交互如图3所示。

1.3 导航控制平台组成
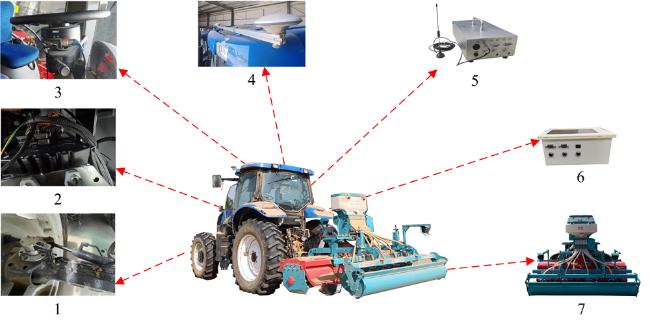
油菜直播机组导航控制平台主要是由Case TM1404型拖拉机、智能播种施肥一体机(湖北永祥农机装备有限公司)、角度传感器、高精度北斗定位系统、电控方向盘、导航控制终端以及车载控制器组成,如图4所示。
导航控制系统主要包括数据获取层、规划控制层以及动作执行层,结构如图5所示。
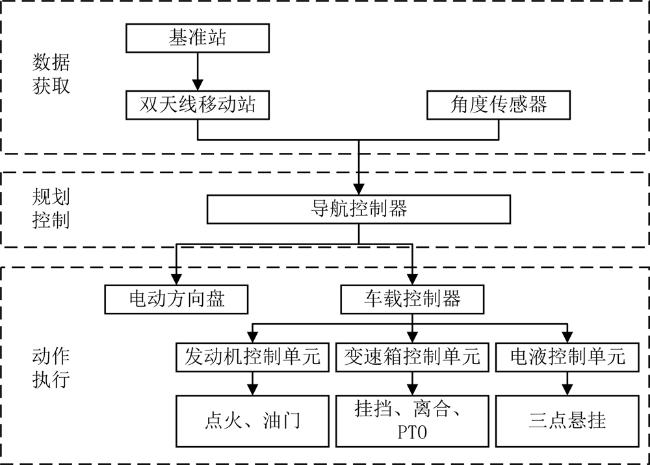
数据获取层由北斗双天线高精度定位系统M600(上海司南卫星导航技术股份有限公司)和角度传感器(ELOBAU 424A10A060型)组成。通过北斗双天线高精度定位系统M600实时获取油菜直播机组经纬度坐标和航向,通过角度传感器获取前轮转角。
规划控制层是以树莓派4B为主控制器的导航控制终端。导航控制终端还包括控制器局域网总线(Controller Area Network,CAN)分析仪、电源模块及触摸显示屏。导航控制终端通过CAN分析仪与车载控制器进行CAN通信,通过串口与方向盘控制器进行通信。
动作执行层主要负责接收控制终端的指令并执行动作。电动方向盘负责控制方向盘转动进而控制前轮转角,车载控制器通过CAN通信控制油菜直播机组的点火与熄火、离合器结合与分离、动力输出装置(Power-Take-Off,PTO)结合与分离、三点悬挂抬升与下降、挡位变换及油门提高与降低等动作。
2 高精度地图构建方法
2.1 地图构建流程
为提升油菜无人播种转场作业效率,提出了基于高精度地图的路径规划方法,实现人为框选作业田块后自动生成作业路径功能。高精度地图的具体构建流程如图6所示,构建步骤如下。
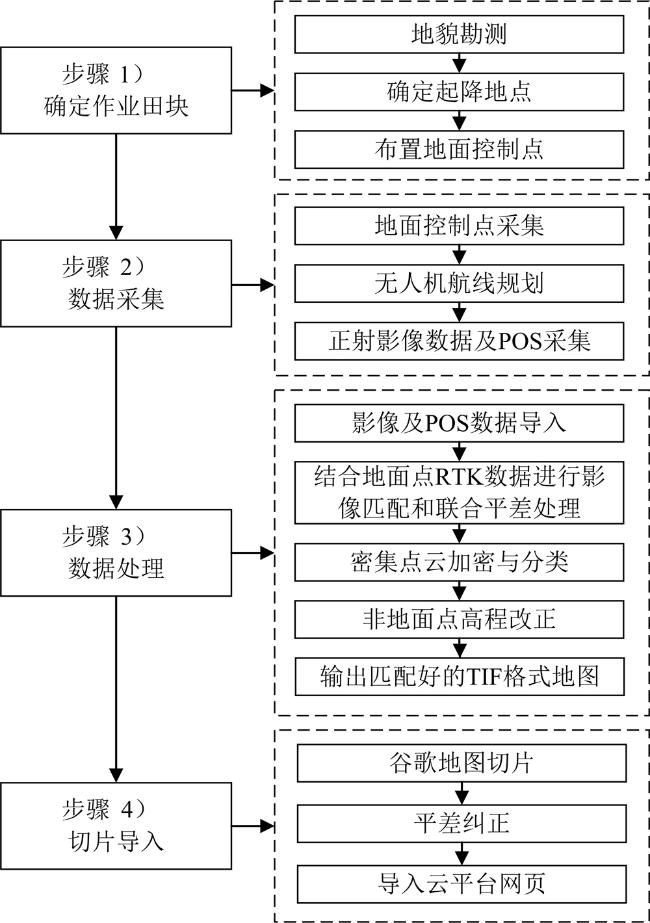
1)确定作业田块后,选定无人机起降地点,在田块合适位置布设地面控制点;
2)对地面控制点进行实时动态(Real Time Kinematic,RTK)数据采集,采集完成后参考《低空数字航空摄影测量外业规范》(CH/T 3004—2021)对无人机航测路线进行规划,设置合适的航高、航向及旁向重叠率,进行无人机影像和位置(Position,POS)数据采集;
3)在Agisoft Metashape Pro 1.7.3软件中,对采集的影像数据和POS数据进行处理,通过去噪、匹配和拼接等一系列方法构建完整作业地图;
4)利用Global Mapper软件进行地图切片,为提升地图精度,基于墨卡托投影[15]进行坐标转换,从而实现平差纠正,得到高精度地图,传输到云平台网页端。

2.2 地图精度试验
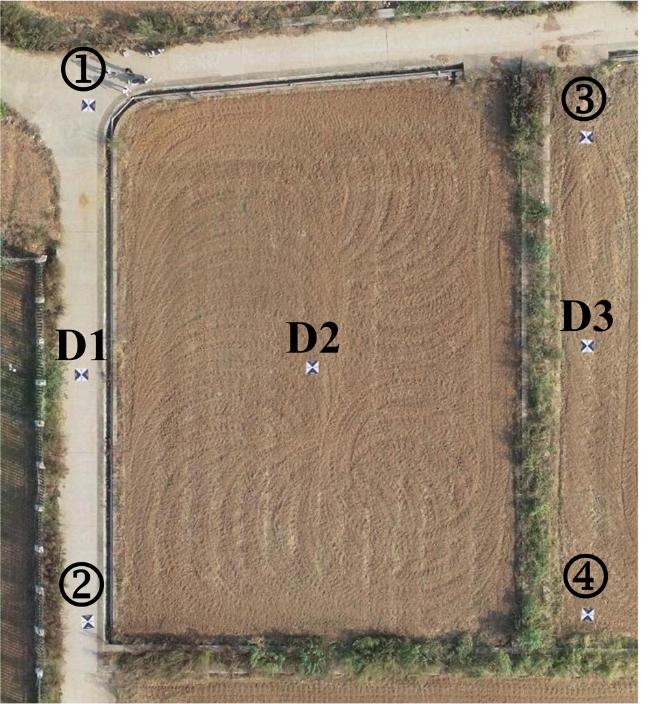
为验证无人机构建的作业地块地图精度,选择湖北省武汉市华中农业大学校内野芷湖边的试验田为试验地点,对其进行高精度地图的构建。将飞行高度设置为100 m,航向及旁向重叠率为65%。在航测区域内选择7个控制点,布设方案如图8所示。其中①~④号为纠偏点,D1~D3为验证点。控制点数据通过北斗高精度定位系统M600采集,坐标系选用WGS84坐标。
将无人机采集的影像和POS数据导入到Agisoft Metashape Pro 1.7.3以及Global Mapper软件中进行处理、合成、切片等操作,再根据纠偏点实际坐标与图像坐标进行平差纠正,获得高精度地图,再计算验证点图像坐标与实际坐标得出其误差值,如表3所示。
表3 高精度地图地面验证点误差Table 3 Verification point error of high-precision map ground |
| 点号 | △x/cm | △y/cm | △s/cm |
|---|---|---|---|
| D1 | 1.22 | 2.31 | 2.61 |
| D2 | 0.98 | 2.55 | 2.73 |
| D3 | ‒2.78 | 1.64 | 3.23 |
由表3验证点误差可知,通过平差纠正后地图平面精度误差最大为3.23 cm。试验结果表明通过无人机构建的高精度地图可以满足无人播种作业路径规划的精度要求。
3 梭行外螺旋路径规划及导航控制方法
系统采用梭行外螺旋全覆盖路径规划方法,为减少漏作业面积,调头处采用两退三切模型,转弯处采用一退两切模型。
3.1 梭行外螺旋路径规划方法
3.1.1 梭行外螺旋路径生成算法
田块边界信息通过人工在高精度地图上框选田块,调用Google地图应用程序编程接口(Application Programming Interface,API),获取到的田块边界顶点经纬度坐标经过墨卡托投影进行坐标转换,将WGS84坐标转换为平面坐标[15]。以边界顶点平面坐标及作业幅宽作为输入,使用JavaScript语言实现框选田块并自动生成梭行外螺旋路径的功能。
梭行外螺旋路径需要从梭行路径生成开始,经测量Case TM1404型拖拉机最小转弯半径为7 m,故田头调头区域宽度应大于7 m,播种机作业幅宽为2.5 m,在保证拖拉机有足够空间完成调头的情况下,为减少拖拉机调头转弯次数,将外螺旋路径设定为3圈。梭行外螺旋路径生成步骤如下。
1)先将矩形田块或近似矩形的凸四边形田块边界顶点平面坐标以3倍作业幅宽向内等间距缩小,如图9中红色线框所示。
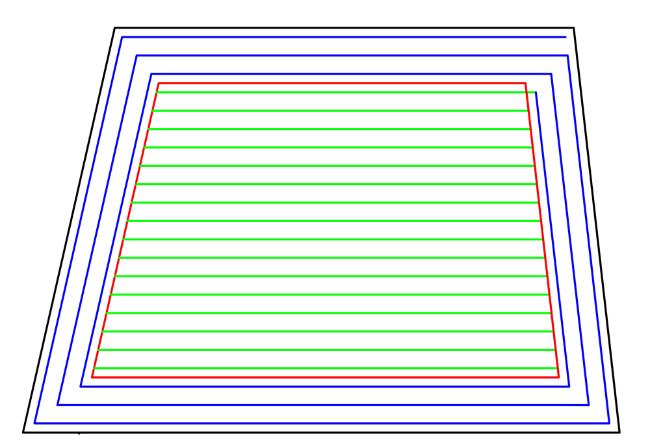
3)再将缩小后的四边形分别以0.5、1.5和2.5倍作业幅宽向外等距扩大后,求出最后一条梭行路径与以0.5倍作业幅宽等距扩大后的边界交点,并按顺序连接边界顶点坐标,得到第1圈外螺旋路径;再求出第1圈外螺旋路径最后一条路径与以1.5倍作业幅宽等距扩大后的边界交点,并按顺序连接边界顶点,得到第2圈外螺旋路径;同理得第3圈外螺旋路径。如图9中蓝色线条所示。
3.1.2 一退两切转弯模型设计
一退两切转弯路径模型如图11所示。根据转弯位置与田块边界距离的大小,设计了具有不同参数的一退两切转弯模型,按照 的顺序行驶,其中点 为两条作业路径的拐点;点 为拖拉机直线倒退的终点;点 为拖拉机弧线倒退的终点。拖拉机的转弯半径为 。以直播机组不触碰到田块边界为前提,为保证拖拉机转弯换线后具有较高的对行精度,拖拉机弧形倒退时应尽可能距离点 远(即线段 最长),计算拖拉机直线倒退段距离(即线段 长度),确定一退两切转弯模型参数。
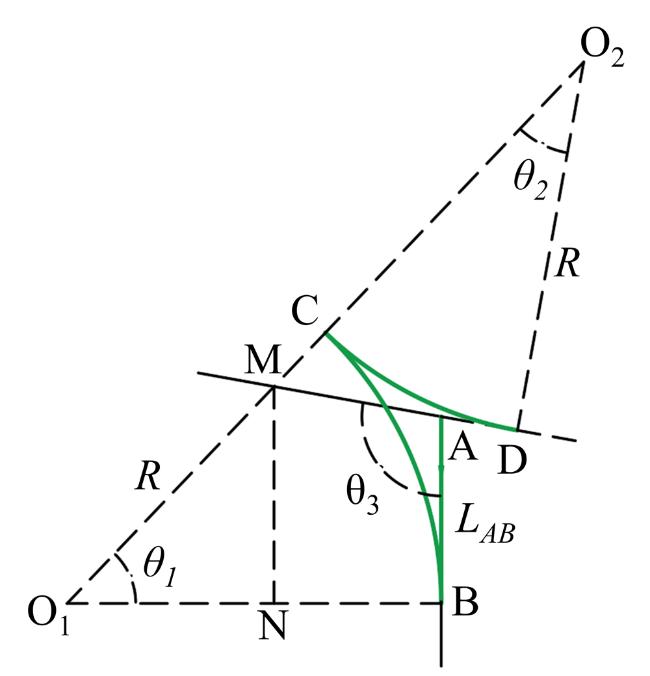
为简化计算过程,设点 为原点 ,线段 的最大长度为 ,点 坐标为 ,由于 点是切点,故设点 坐标为 ,则切点 坐标为 ,由点 和点 坐标求得直线 方程,如公式(1) 所示:
令公式(1) ,得点 ,根据点 、点 、点 坐标结合两点之间距离公式可得方程组(2):
对 用余弦公式,并结合方程组(2)得公式(3) :
由公式(1) 和切点 坐标可得点 坐标为 。
由三角形几何关系可得公式(4) :
由四边形内角和为 ,可得公式(5) :
由公式(4) 和(5)可得公式(6) :
直线 斜率为 ,结合 坐标和公式(6) ,得直线 方程,如公式(7) 所示:
由直线 和直线 得方程组(8):
即点 横纵坐标由方程组(9)所示:
又弧线段 和 的长度为 ,故当拖拉机转弯半径 等于拖拉机最小转弯半径 时,拖拉机转弯效率最高。由公式(3) 和方程组(9)可得点 坐标和线段 长度,即拖拉机直线倒退段长度。
3.1.3 作业面积及覆盖率仿真对比试验
为验证梭行外螺旋全覆盖路径相较于传统的梭行和套行作业方式漏作业区域面积更小进行仿真试验,Case TM1404型拖拉机最小转弯半径为7 m,故梭行和套行作业需要在田头预留7 m的长度,供拖拉机在田头进行转弯或调头,播种机幅宽(AC、DE、FG)为2.5 m,排种口距离镇压滚筒最末端(AB)为0.6 m,直播机组整体长度为7 m。该方法主要针对矩形或近似矩形的凸四边形田块,为简化计算,以矩形田块为例,漏作业区域集中在外螺旋路径最后一圈,依据图12,红线为田块边界,蓝线为规划的外螺旋路径,通过计算得到梭行外螺旋全覆盖作业路径漏作业区域面积为49.75 m2 [(3×(0.6×2.5+3.9×2.5)+6.4×2.5)m2]。选取3块大小不同的矩形田块,对3种不同作业方式的作业面积及覆盖率进行比较,结果如表4所示。
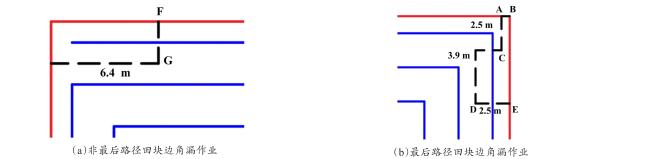
图12 田块边角漏作业区域示意图Fig. 12 Schematic diagram of the leakage operation area at the edges and corners of the field |
表4 三种作业方式作业面积及覆盖率对比Table 4 Comparison of operating area and coverage of three operating methods |
| 田块面积/m2 | 作业方式 | 作业面积/m2 | 作业覆盖率/% | 作业覆盖率对比结果/% |
|---|---|---|---|---|
| 50×30 | 梭行 | 1 080.00 | 72.00 | 24.68 |
| 套行 | 1 080.00 | 72.00 | ||
| 梭行外螺旋 | 1 450.25 | 96.68 | ||
| 50×50 | 梭行 | 1 800.00 | 72.00 | 26.01 |
| 套行 | 1 800.00 | 72.00 | ||
| 梭行外螺旋 | 2 450.25 | 98.01 | ||
| 70×50 | 梭行 | 2 800.00 | 80.00 | 18.58 |
| 套行 | 2 800.00 | 80.00 | ||
| 梭行外螺旋 | 3 450.25 | 98.58 |
通过对这3块矩形田块仿真试验可得,梭行外螺旋全覆盖路径较梭行与套行作业路径漏作业率减小18.58%~26.01%。
3.2 梭行外螺旋路径导航控制方法
3.2.1 导航控制器设计
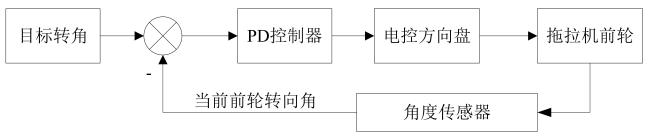
3.2.2 导航控制策略
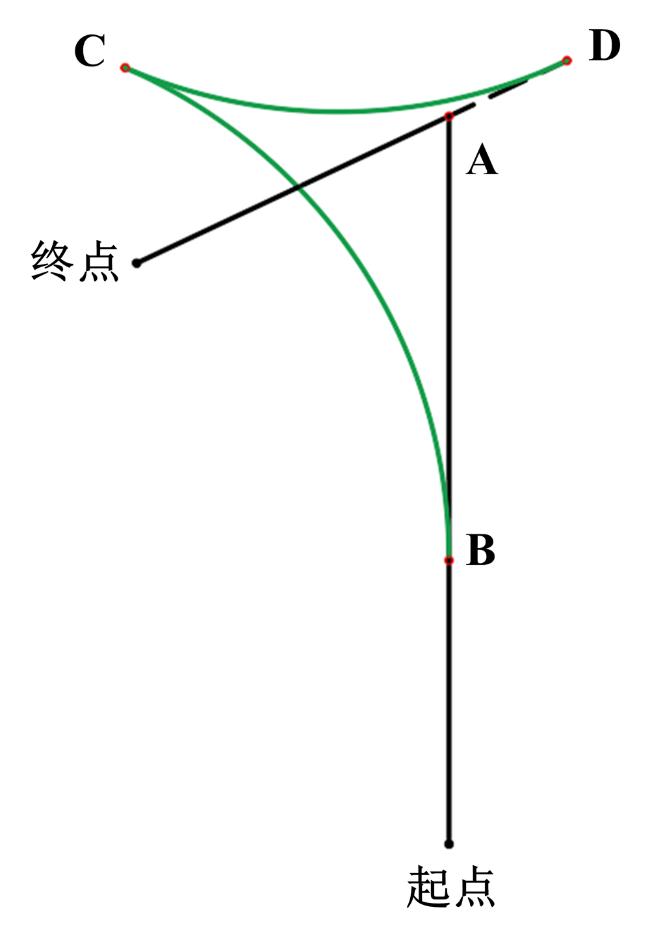
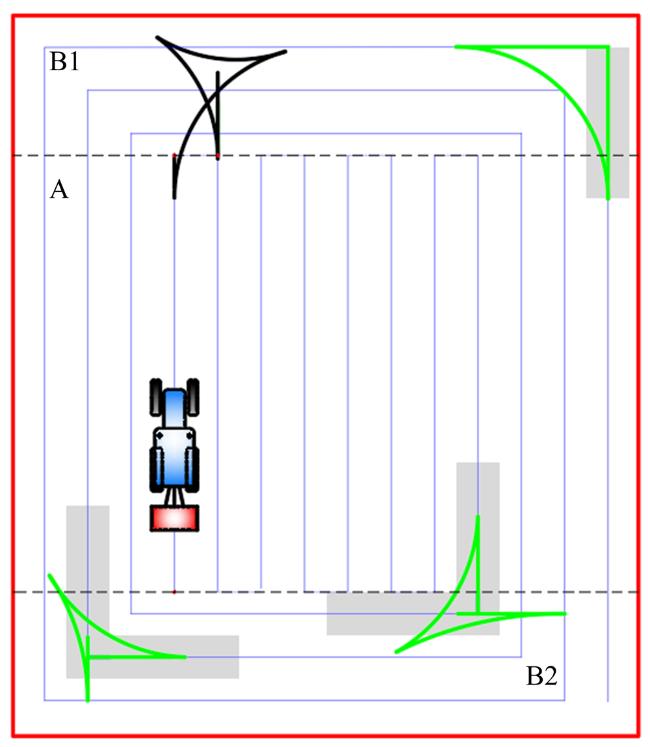
图14 拖拉机一退两切转弯示意图Fig. 14 Schematic diagram of tractor's one-back and two-cut turning |
表5 拖拉机一退两切作业控制规则Table 5 Control rules for tractor one-back and two-cut operations |
| 路径段 | 速度 | 机具控制 | 挡位控制 |
|---|---|---|---|
| 起点→A | H | D | F |
| A→B | L | U | R |
| B→C | L | U | F |
| C→D | L | U | R |
| D→A | H | U | F |
| A→终点 | H | D | F |
|
4 无人播种作业系统田间试验及结果分析
4.1 试验条件及方法
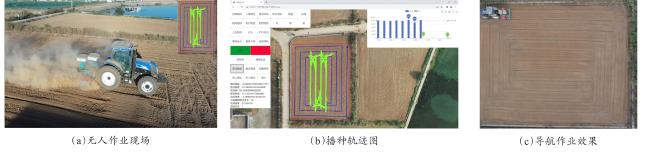
为测试油菜无人播种系统的田间播种作业效果,于2022年10月5日,在湖北省武汉市华中农业大学校内野芷湖边的试验田,使用网页端工具,在试验田上框选出播种区域,根据油菜播种的农艺要求,通过算法自动生成梭行外螺旋全覆盖播种路径,规划的播种路径为17行,每行作业幅宽为2.5 m。以Case TM1404型拖拉机搭载智能播种施肥一体机为试验平台进行无人播种作业试验,通过软件实时记录田间作业过程中的作业速度及横向偏差等数据。
4.2 田间导航试验结果
表6 油菜无人播种作业各行直线跟踪结果Table 6 Line tracking results of rapeseed unmanned seeding operation in each row |
| 行号 | 试验平均 速度/(m/s) | 最大横向 偏差/cm | 平均绝对 偏差/cm | 标准差/cm |
|---|---|---|---|---|
| 1 | 1.51 | 5.77 | 1.25 | 3.36 |
| 2 | 1.48 | 7.22 | 1.23 | 3.27 |
| 3 | 1.35 | 7.27 | 1.61 | 2.67 |
| 4 | 1.42 | 5.13 | 1.11 | 2.05 |
| 5 | 1.58 | 7.09 | 1.03 | 3.13 |
| 6 | 1.31 | 6.88 | 1.62 | 3.35 |
| 7 | 1.45 | 6.05 | 1.61 | 3.41 |
| 8 | 1.54 | 7.94 | 1.84 | 3.43 |
| 9 | 1.46 | 6.22 | 1.85 | 3.90 |
| 10 | 1.38 | 4.25 | 1.67 | 2.99 |
| 11 | 1.52 | 5.93 | 1.42 | 3.30 |
| 12 | 1.43 | 6.55 | 1.37 | 3.46 |
| 13 | 1.37 | 4.30 | 1.77 | 2.12 |
| 14 | 1.59 | 5.20 | 1.68 | 2.71 |
| 15 | 1.44 | 4.50 | 1.04 | 2.98 |
| 16 | 1.55 | 6.64 | 1.82 | 3.18 |
| 17 | 1.39 | 6.39 | 1.73 | 3.21 |
4.3 播种效果分析
利用无人机对处于油菜花期的作业田块进行航拍,得到一系列作业田块的彩色图像。按照文章2.1节高精度地图的构建流程,将无人机采集的影像数据导入到Agisoft Metashape Pro 1.7.3软件中,对图像进行拼接,得到包含位置信息的作业田块高精度地图,如图16所示。利用图新地球4软件,人工识别油菜出苗区域和未出苗区域,基于软件测量统计田块面积为1 018.61 m2,未长油菜区域面积总和为69.63 m2,作业面积为948.98 m2,作业覆盖率为93.16%。

5 结 论
为提升油菜无人播种转场作业效率,提出了“无人机构建高精度地图+远程网页端规划作业路径”方法,通过使用无人机采集影像数据、软件处理、拼接、切片、平差纠正等操作构建的地图通过试验验证得到地图平面最大误差为3.23 cm,满足油菜无人播种路径规划的精度要求。
为实现油菜无人高覆盖率播种作业,设计了一种一退两切转弯换线自动控制方法,进一步提高了梭行外螺旋全覆盖路径的播种作业覆盖率。以Case TM1404型拖拉机搭载智能播种施肥一体机为平台,构建了一套基于云-端高精度地图的油菜无人播种作业系统,试验表明该系统可在网页端高精地图上选取田块边界后自动生成作业路径,并可完成田间调头换线、转弯换线,实现远程一键启动直播机组进行无人播种作业,证明了本研究所构建的油菜无人播种作业系统的有效性与可行性。
依据直播机组几何模型计算一退两切转弯模型具体参数,采用两退三切鱼尾调头自动控制方法完成梭行路径换线,一退两切转弯自动控制方法完成外螺旋路径换线;并开展了3种作业方式、作业面积及作业覆盖率对比试验,仿真结果表明,梭行外螺旋全覆盖路径较梭行与套行作业路径,漏作业率减少18.58%~26.01%。
田间试验结果表明,油菜直播机组在田间作业时,行驶平均速度为1.46 m/s,最大横向偏差为7.94 cm,最大平均绝对偏差为1.85 cm;田块面积为1 018.61 m2,作业面积为948.98 m2,作业覆盖率为93.16%。
本研究可为南方中小田块油菜无人播种作业提供技术参考,未来将探索不规则田块情况下的油菜无人播种作业模式,进一步提高系统的适用性。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}