Smart Agriculture ›› 2024, Vol. 6 ›› Issue (3): 69-81.doi: 10.12133/j.smartag.SA202306013
• Topic--Smart Agricultural Technology and Machinery in Hilly and Mountainous Areas • Previous Articles Next Articles
LUAN Shijie1, SUN Yefeng2, GONG Liang2( ), ZHANG Kai3
), ZHANG Kai3
Received:2023-06-14
Online:2024-05-30
Foundation items:Shanghai Science and Technology Agriculture Project(Shanghai Nongke Tuzi 〔2022〕 No. 3-1); Key R&D Project of Ministry of Science and Technology(2022YFD2001201)
About author:corresponding author:
CLC Number:
LUAN Shijie, SUN Yefeng, GONG Liang, ZHANG Kai. Trajectory Tracking Method of Agricultural Machinery Multi-Robot Formation Operation Based on MPC Delay Compensator[J]. Smart Agriculture, 2024, 6(3): 69-81.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202306013

Fig. 1
Initial state schematic diagram of agricultural machinery convoy cooperative driving
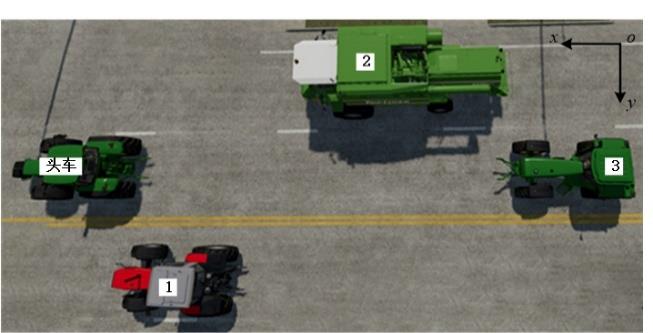

Fig. 2
Final state schematic diagram of agricultural machinery convoy cooperative driving
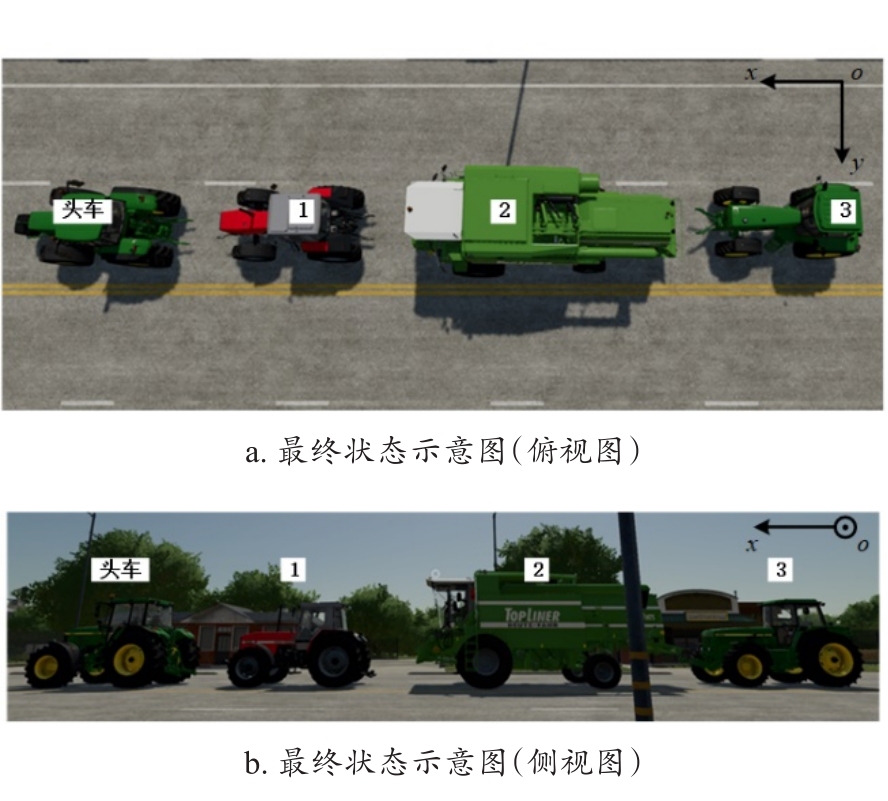
Table 1
Initial state parameters of agricultural machinery in formation form
| 参数符号 | 物理意义 | 数值 |
|---|---|---|
| 头车初始位置 | (50,6) | |
| 头车初速度/( ) | 12 | |
| 1号车初始位置 | (40,10) | |
| 1号车初速度/( ) | 14 | |
| 2号车初始位置 | (20,2) | |
| 2号车初速度/( ) | 16 | |
| 3号车初始位置 | (1,6) | |
| 3号车初速度/( ) | 15 |
Fig. 3
Multi-vehicle cooperative control framework based on vehicle to everything
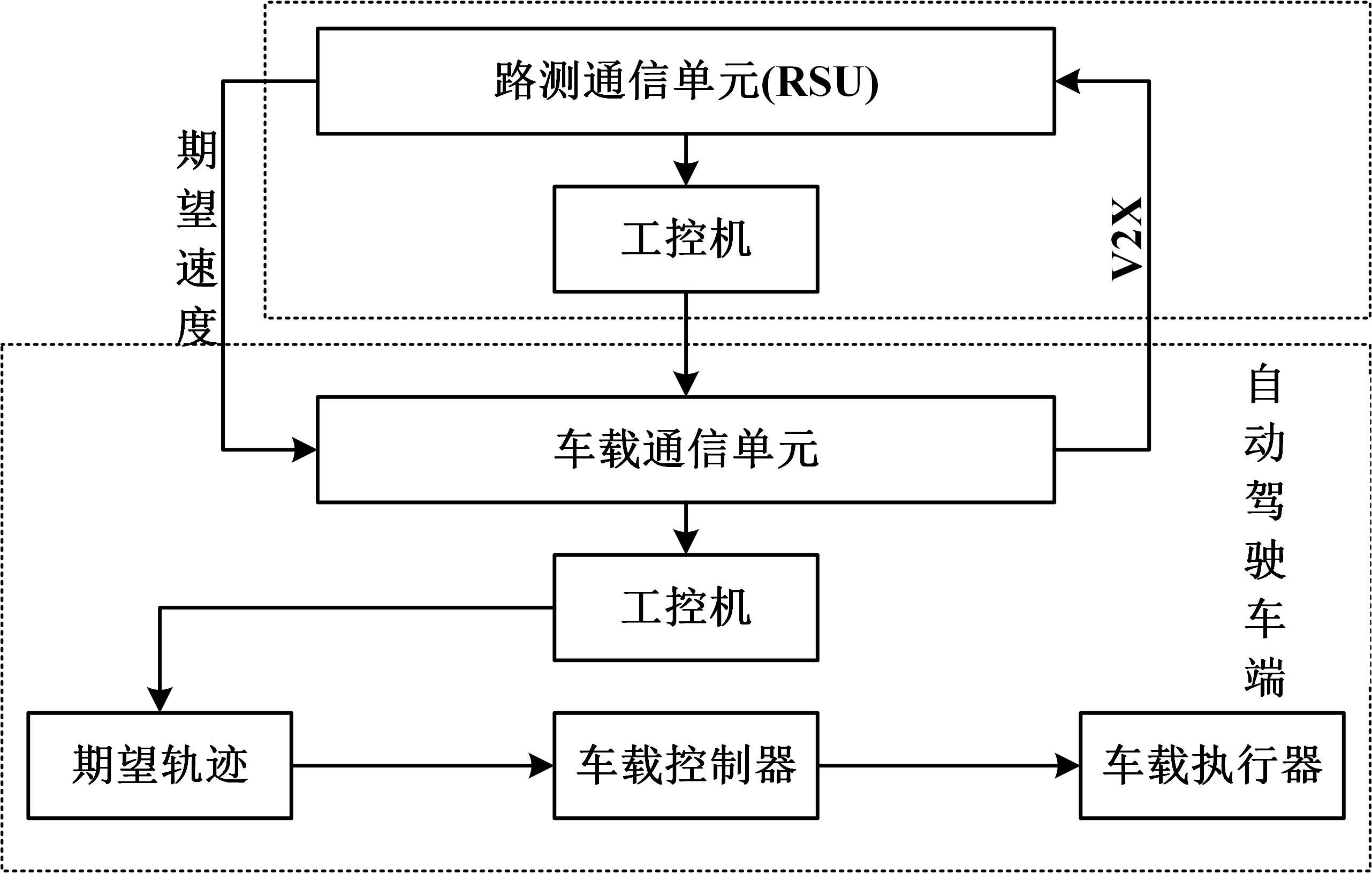
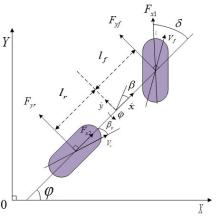
Fig. 4
Simplified model of agricultural machinery to bicycle model
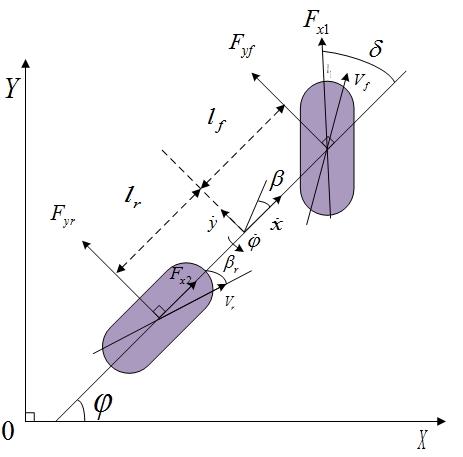
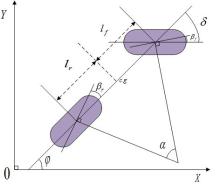
Fig. 5
Steady-state steering model of agricultural machinery model
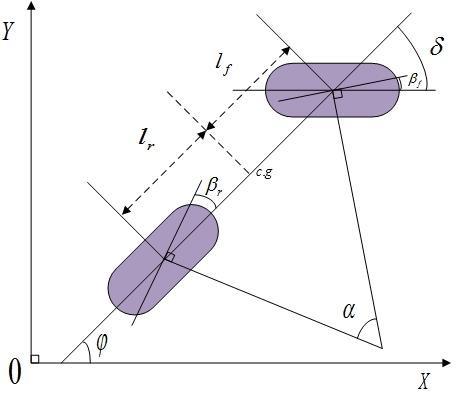
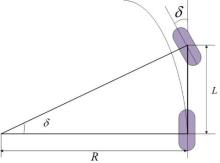
Fig. 6
Ackermann steering system model
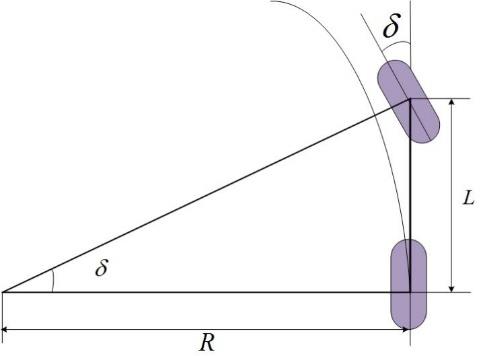
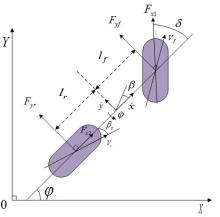
Fig. 7
Agricultural machinery dynamics model built in this research based on bicycle model
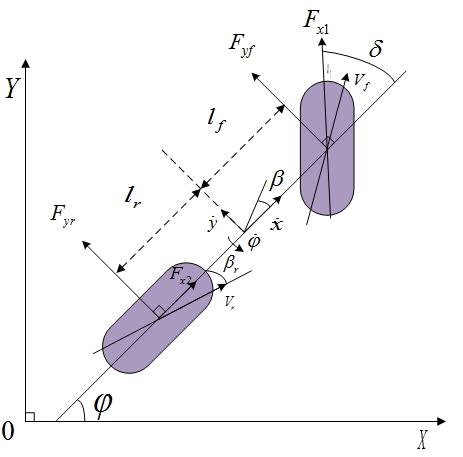

Fig. 8
Principle of MPC controller
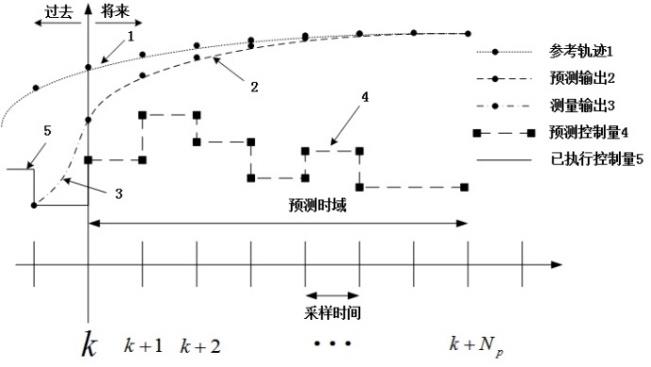
Table 2
Relevant parameters of single machine dynamics for formation running agricultural machinery
| 参数符号 | 物理意义 | 数值 |
|---|---|---|
| 前轮侧偏刚度 | 61 135 N/rad | |
| 后轮侧偏刚度 | 61 135 N/rad | |
| 整车质量 | 1 465 kg | |
| 前轴距 | 1.2 m | |
| 后轴距 | 1.6 m |
Fig. 9
Flowchart of multi-vehicle convoy collaboration structure
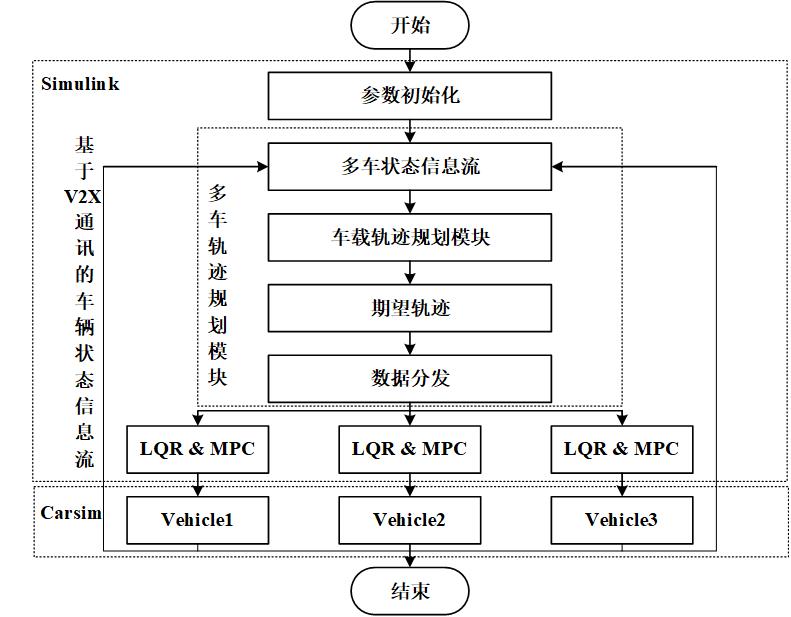
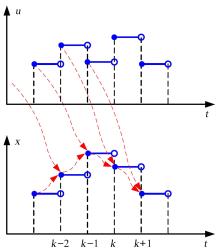
Fig. 10
Fixed delay system for control input
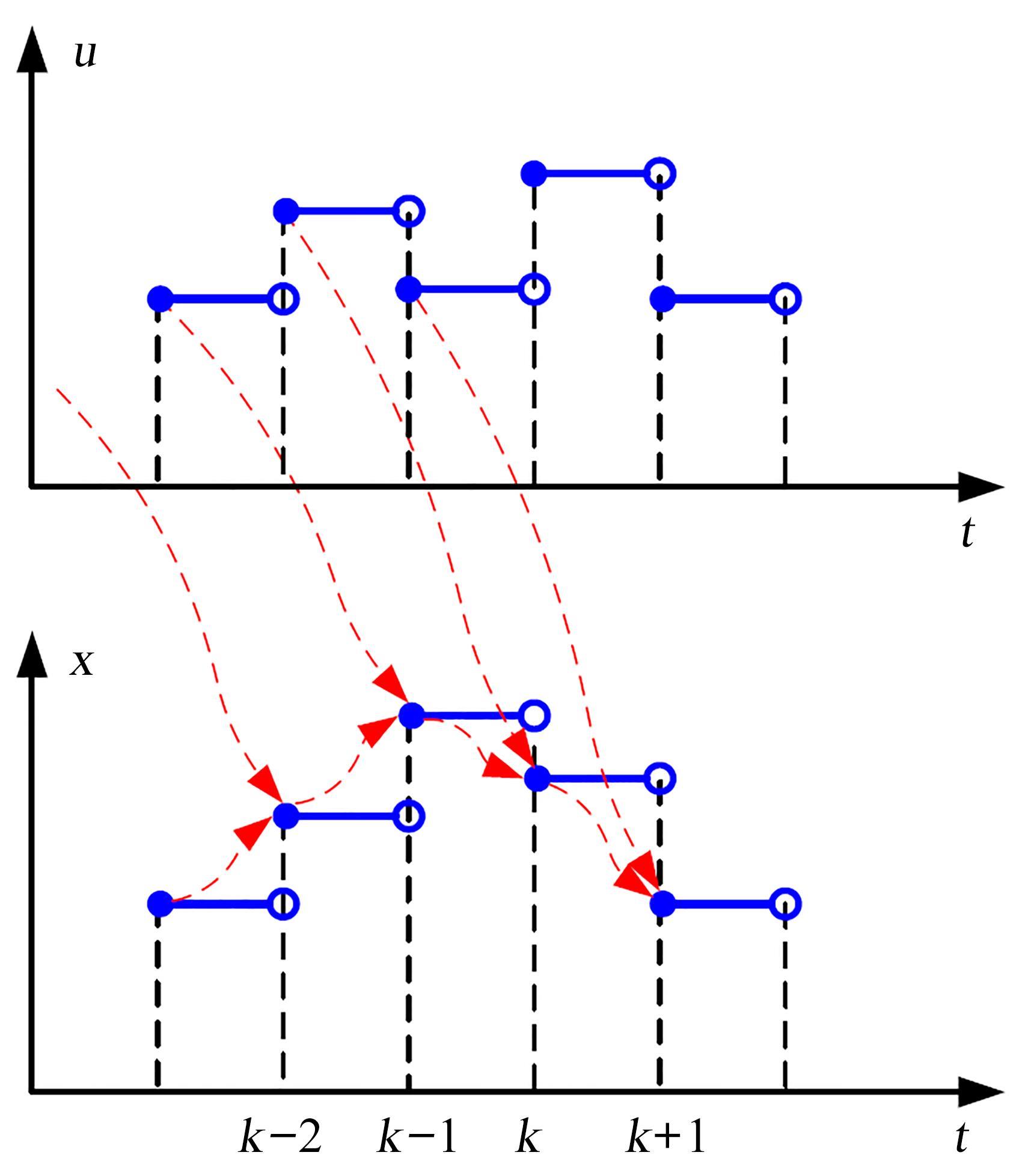
Fig. 11
Graph of velocity comparison results between with and without MPC model when d=5


Fig. 12
Velocity error and longitudinal acceleration comparison between with and without MPC model when d=5
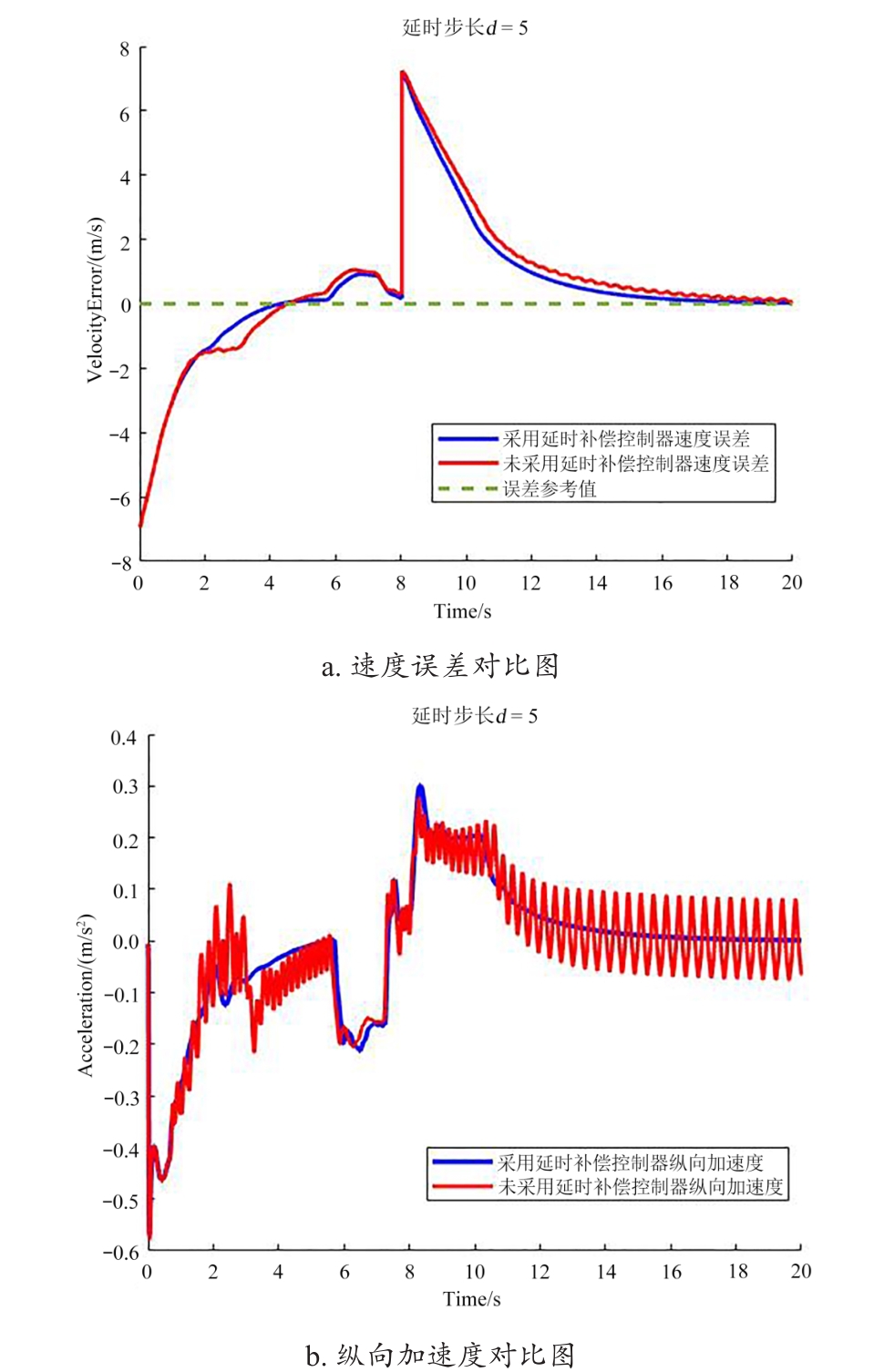
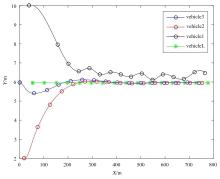
Fig. 13
Trajectory curves of four vehicles with delay step length d=5 for Vehicle 1
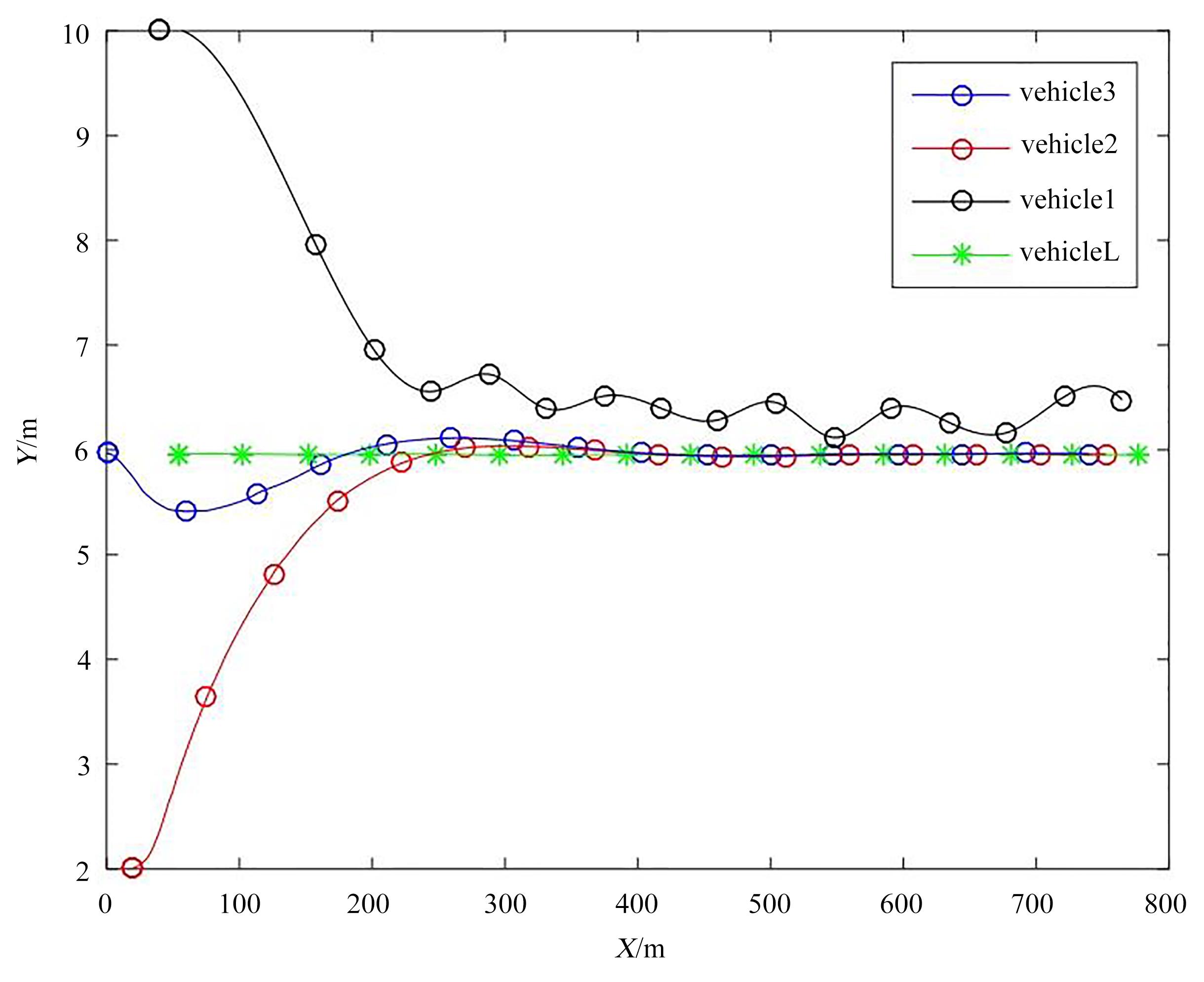
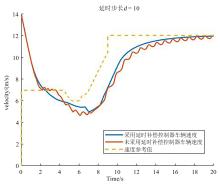
Fig. 14
Velocity comparison results graph between with and without MPC model when d=10
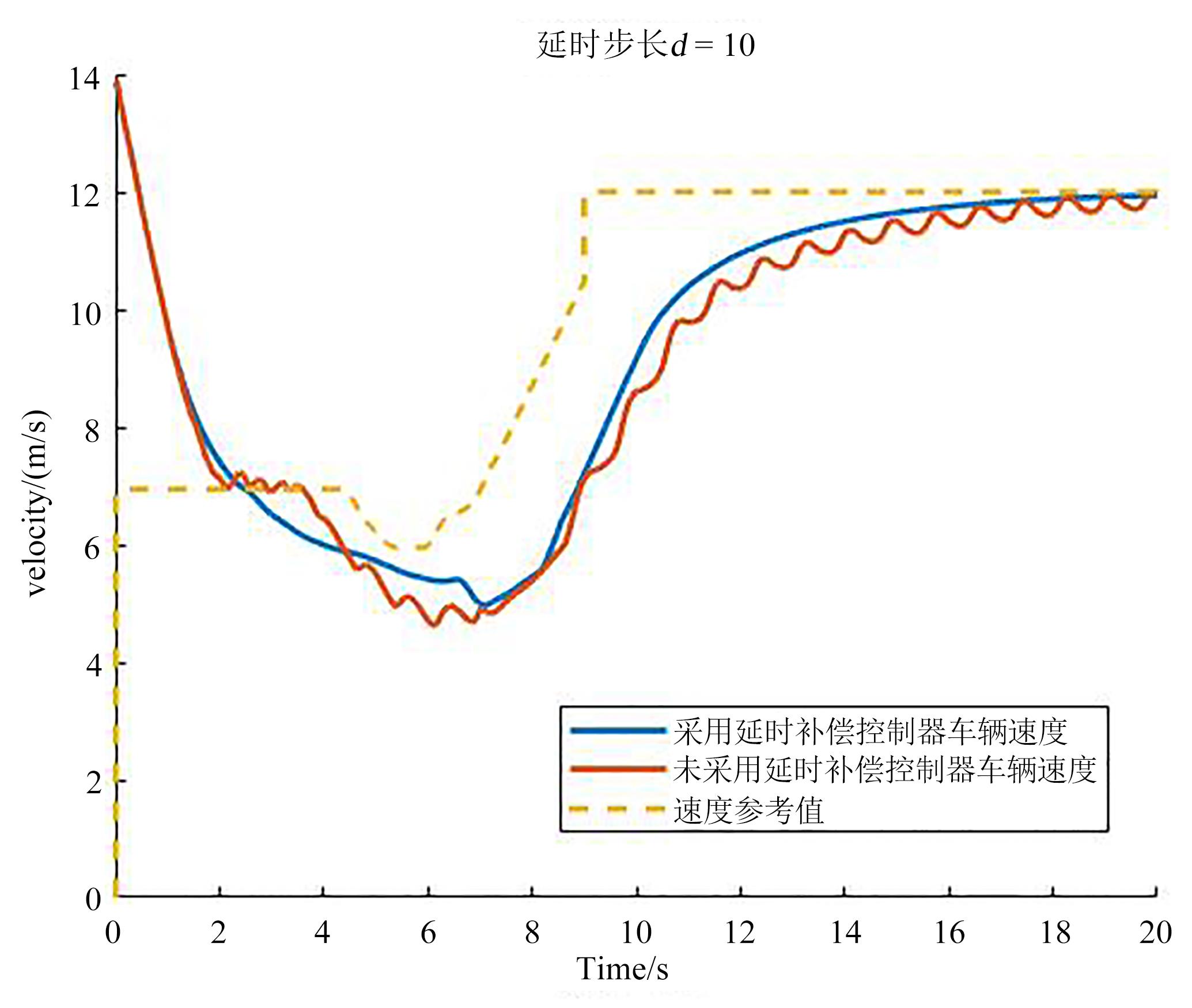

Fig. 15
Comparison of velocity error and longitudinal acceleration between with and without MPC model when d =10
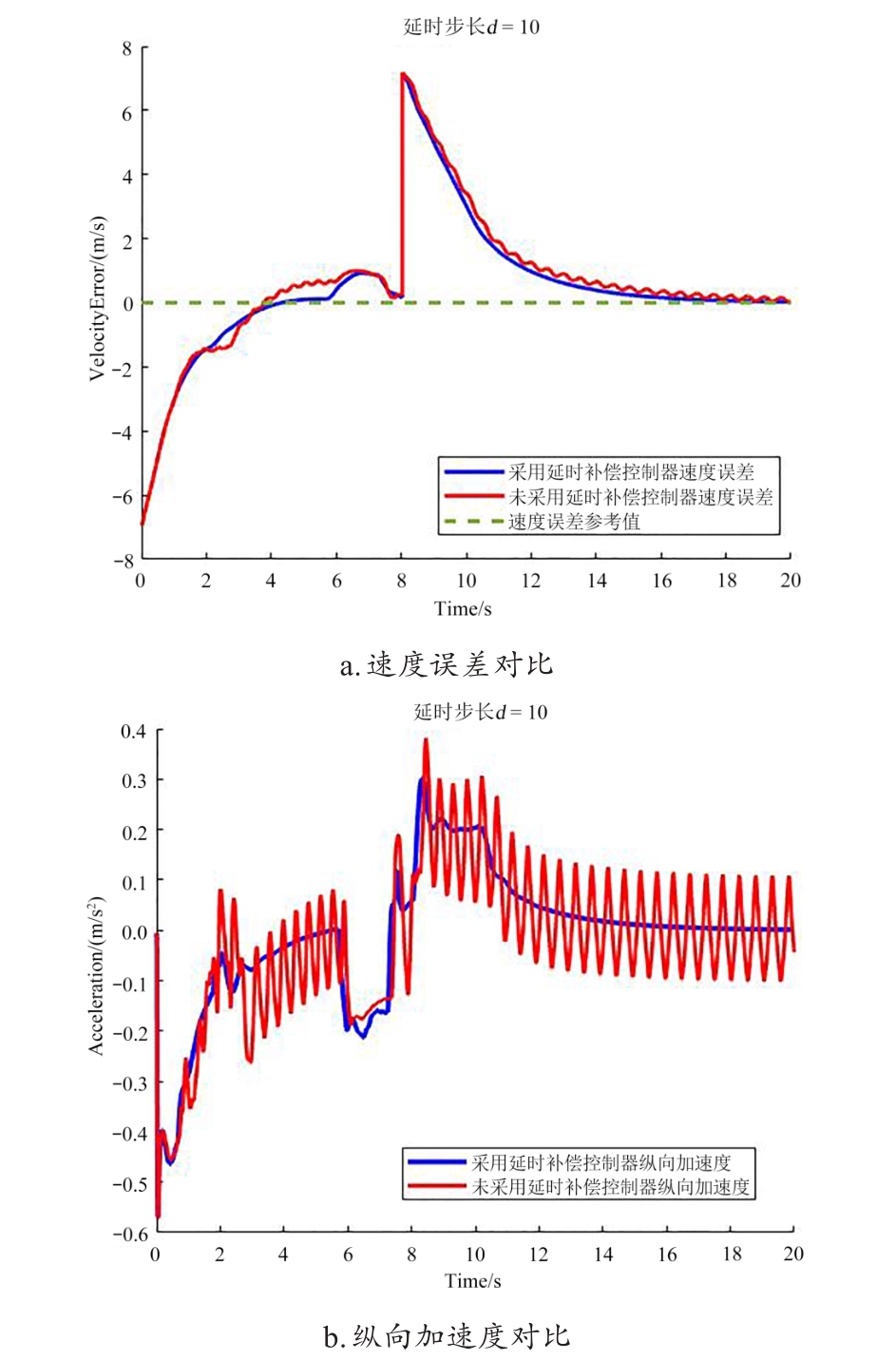
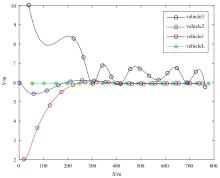
Fig. 16
Trajectory curves of four vehicles with delay step length d = 10 for Vehicle 1
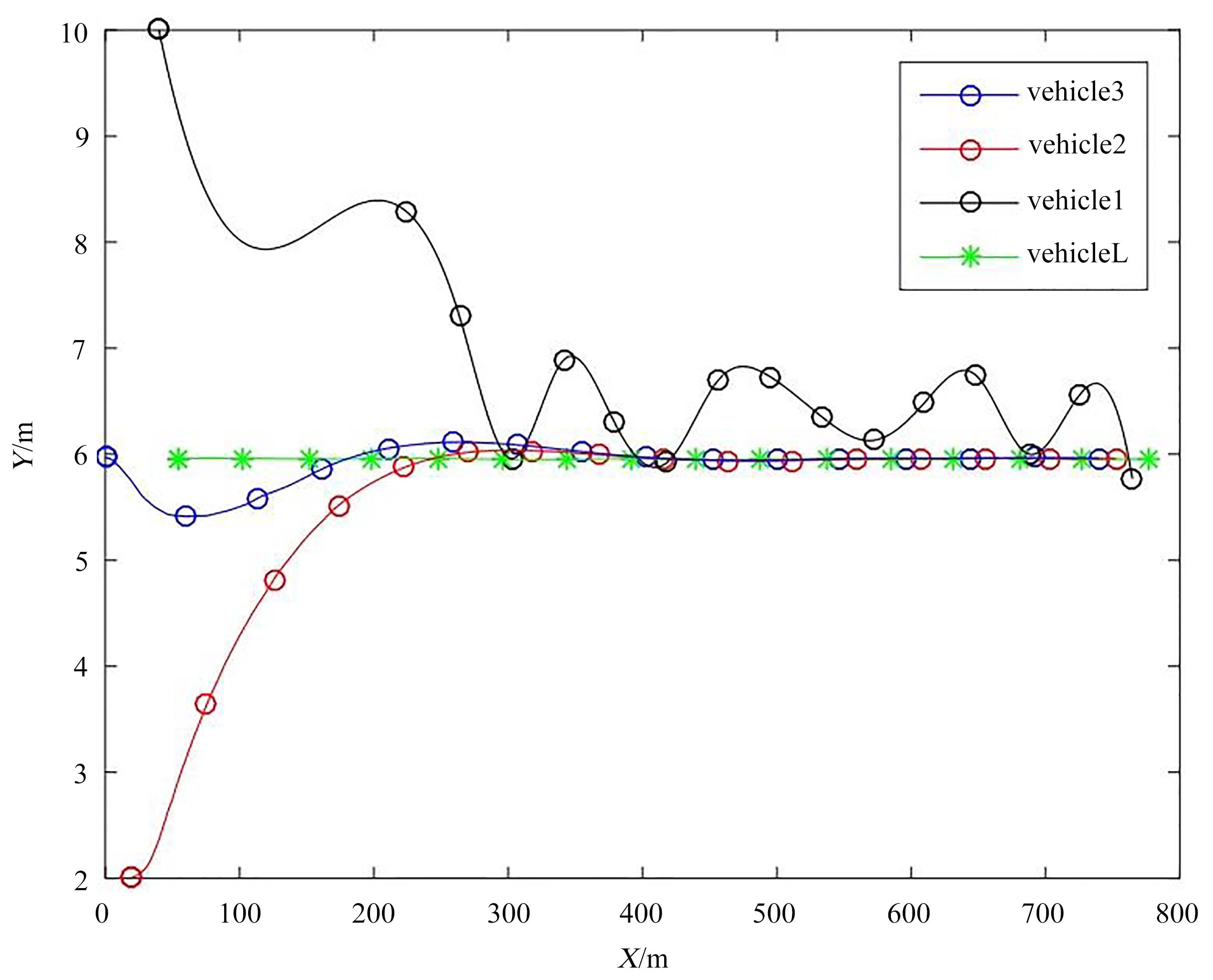

Fig. 17
Trajectory curves of a four-vehicle convoy with delay compensation (d =5)


Fig. 18
Trajectory curves of a four-vehicle convoy with delay compensation (d =10)

| 1 |
刘成良, 林洪振, 李彦明, 等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报, 2020, 51(1): 1-18.
|
|
|
|
| 2 |
刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55.
|
|
|
|
| 3 |
李志腾, 李彦明, 唐小涛, 等. 水稻穴直播机自主驾驶控制系统设计[J]. 农机化研究, 2019, 41(2): 150-154.
|
|
|
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
胡鸿彬, 李彦明, 唐小涛, 等. 基于Android的农机导航管理系统研究与设计[J]. 农机化研究, 2019, 41(5): 179-183.
|
|
|
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
刘思源. 车联网自适应协同定位技术的研究[D]. 上海: 上海交通大学, 2019.
|
|
|
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
刘博, 罗霞, 朱健. 无人驾驶车辆自动避障路径规划仿真研究[J]. 计算机仿真, 2018, 35(2): 105-110.
|
|
|
|
| 29 |
熊思华, 李彦明, 焦中元, 等. 稻麦联合收获机械总线化监控系统研究[J]. 农机化研究, 2019, 41(4): 190-193, 199.
|
|
|
|
| 30 |
|
| 31 |
|
| 32 |
|
| 33 |
|
| 34 |
|
| [1] | ZHU Tianwen, WANG Xu, ZHANG Bo, DU Xintong, WU Chundu. Multi-Machine Collaborative Operation Scheduling and Planning Method Based on Improved Genetic Algorithm [J]. Smart Agriculture, 2026, 8(1): 226-236. |
| [2] | LI Lei, SHE Xiaoming, TANG Xinglong, ZHANG Tao, DONG Jiwei, GU Yuchuan, ZHOU Xiaohui, FENG Wei, YANG Qinghui. Obstacle Avoidance Control Method of Electric Skid-Steering Chassis Based on Fuzzy Logic Control [J]. Smart Agriculture, 2026, 8(1): 213-225. |
| [3] | ZHAO Chunjiang, FAN Beibei, LI Jin, FENG Qingchun. Agricultural Robots: Technology Progress, Challenges and Trends [J]. Smart Agriculture, 2023, 5(4): 1-15. |
| [4] | LI Li, LI Minzan, LIU Gang, ZHANG Man, WANG Maohua. Goals, Key Technologies, and Regional Models of Smart Farming for Field Crops in China [J]. Smart Agriculture, 2022, 4(4): 26-34. |
| [5] | HU Xiaolu, LIANG Xuexiu, ZHANG Junning, MEI Anjun, LYU Chengxu. Construction of Standard System Framework for Intelligent Agricultural Machinery in China [J]. Smart Agriculture, 2020, 2(4): 116-123. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







