Smart Agriculture ›› 2024, Vol. 6 ›› Issue (3): 82-93.doi: 10.12133/j.smartag.SA202401010
• Topic--Smart Agricultural Technology and Machinery in Hilly and Mountainous Areas • Previous Articles Next Articles
HE Qing1, JI Jie1( ), FENG Wei2, ZHAO Lijun3, ZHANG Bohan1
), FENG Wei2, ZHAO Lijun3, ZHANG Bohan1
Received:2024-01-10
Online:2024-05-30
Foundation items:Chongqing Graduate Research Innovation Project(CYS23207); Chongqing Science and Technology Bureau Agriculture and Rural Key Research and Development Project(cstc2021jscx-gksbX0003); Science and Technology Research Project of Chongqing Education Commission(KJZD-M202201302); Chongqing Science and Technology Bureau Innovation Development Joint Fund Project(CSTB2022NSCQ-LZX0024)
About author:corresponding author:
HE Qing, JI Jie, FENG Wei, ZHAO Lijun, ZHANG Bohan. Adaptive Time Horizon MPC Path Tracking Control Method for Mowing Robot[J]. Smart Agriculture, 2024, 6(3): 82-93.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202401010
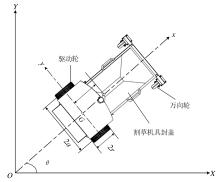
Fig. 1
Top view of the mowing robot model
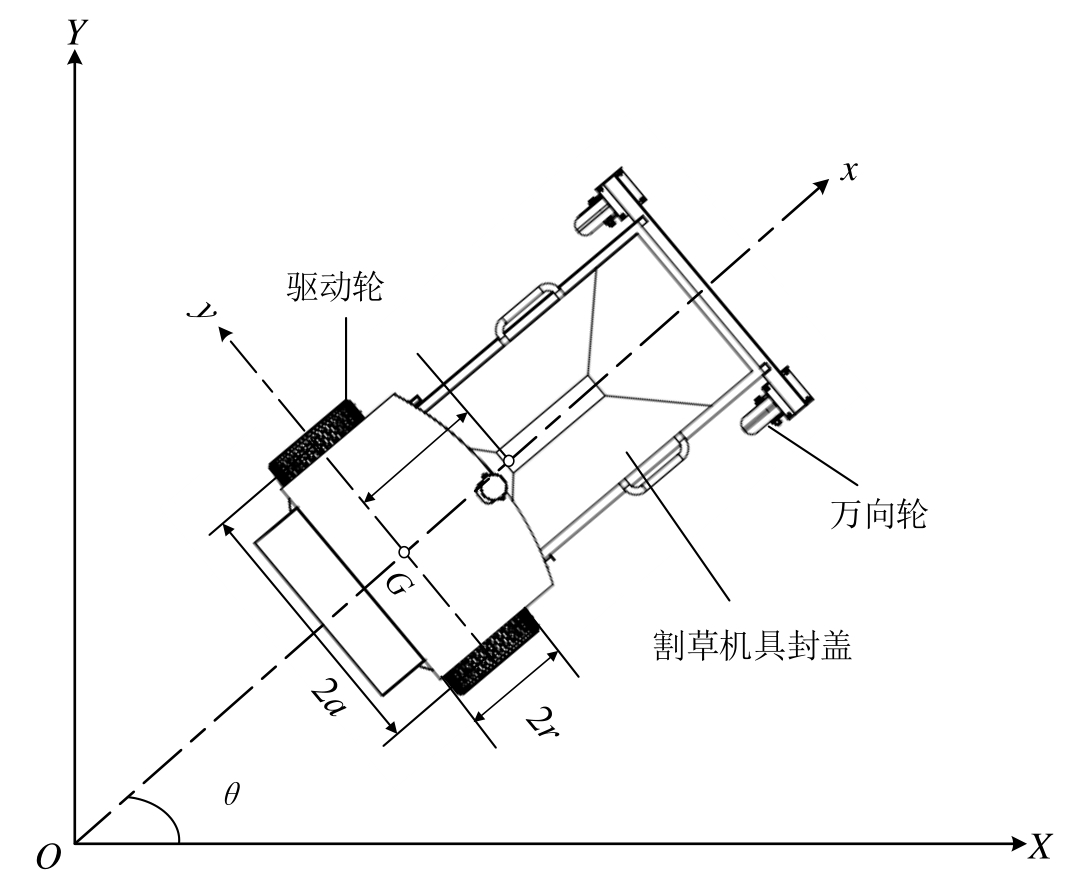

Fig. 2
Structural diagram of adaptive time horizon MPC control system
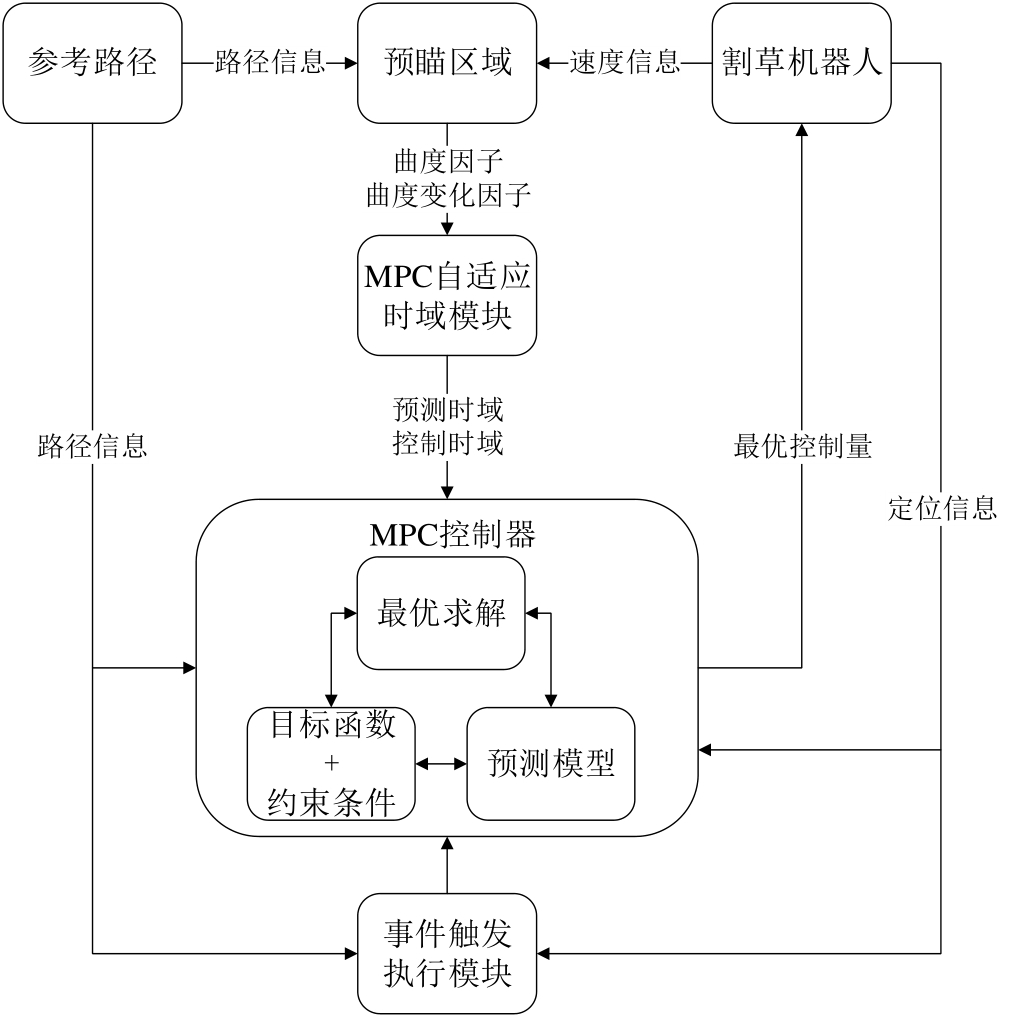
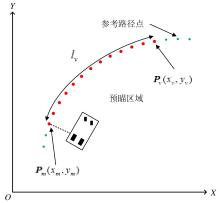
Fig. 3
Preview area of the reference path ahead

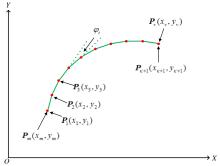
Fig. 4
Schematic diagram of the curvature calculation of the preview area of the reference path ahead
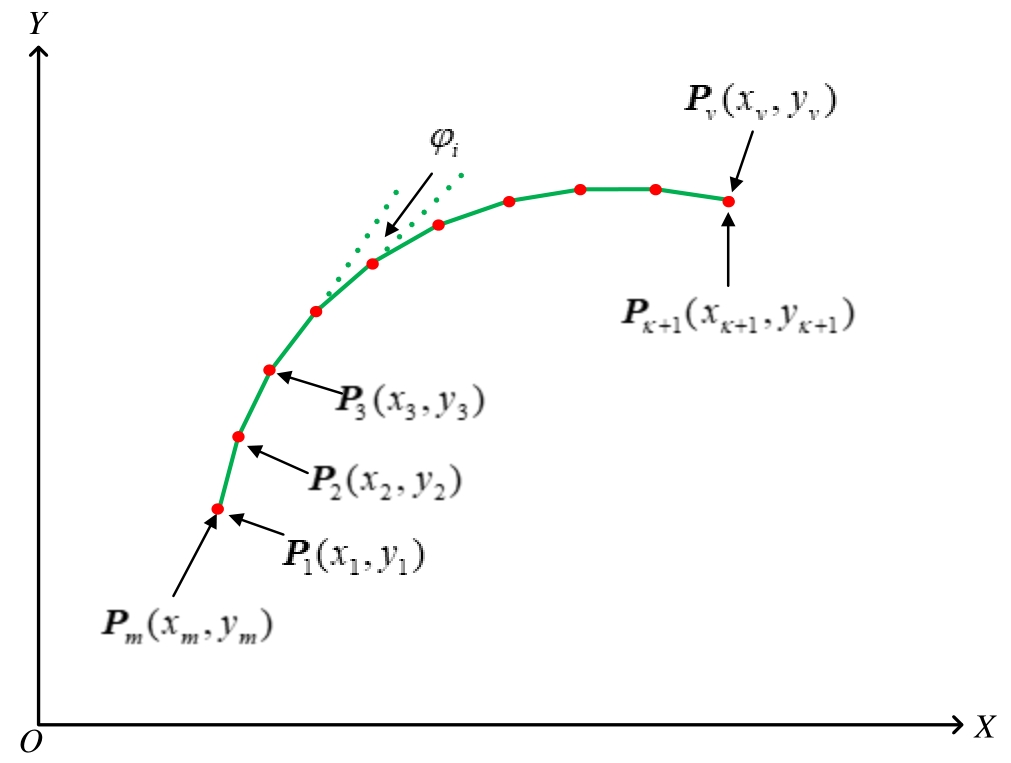

Fig. 5
The extent of the preview area of the reference path ahead reaches the end of the reference path
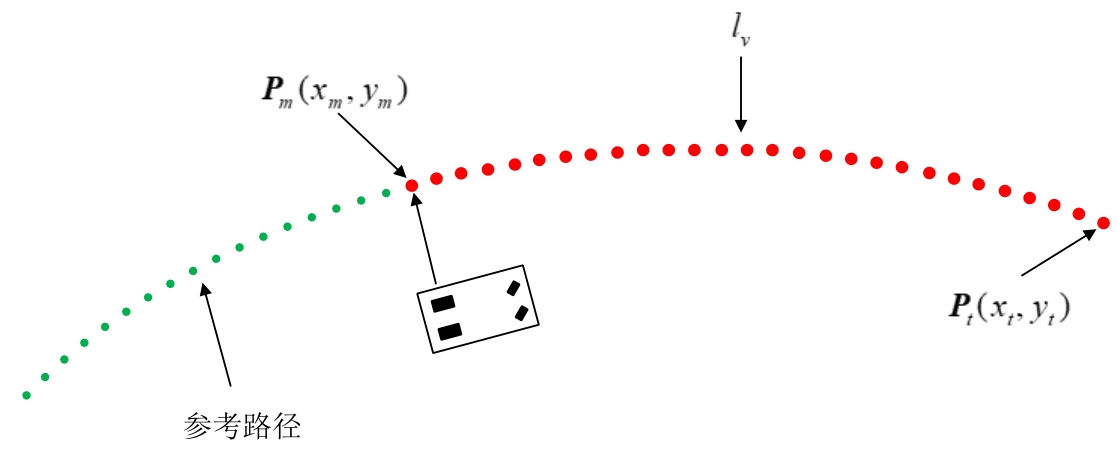

Fig. 6
Influence of MPC prediction horizon on path following
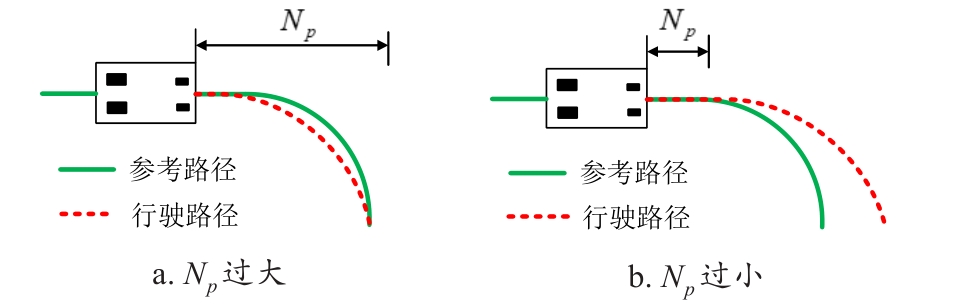

Fig. 7
Influence of control horizon on path following control
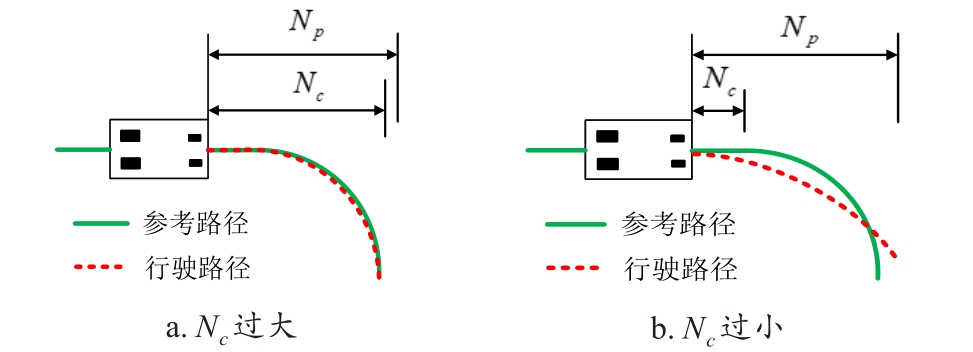
Fig. 8
Membership function of input and output of fuzzy controller for adaptive time horizon module

Table 1
Quantization factor of fuzzy input and output
| 变量 | 曲度因子 | 曲度变化因子 | 预测时域 |
|---|---|---|---|
| 基本论域 | [0,1] | [0,1] | [ |
| 模糊论域 | [0,1] | [0,1] | [0,1] |
| 量化因子 | 1 | 1 | 1/21 |
Table 2
Fuzzy rules for the MPC prediction horizon
| VL | L | M | H | VH | |
|---|---|---|---|---|---|
| VL | VS | S | ML | L | VL |
| L | S | MS | ML | L | VL |
| M | MS | M | L | VL | VL |
| H | M | ML | VL | VL | VL |
| VH | ML | L | VL | VL | VL |
Fig. 9
Fuzzy controller input and output response surfaces
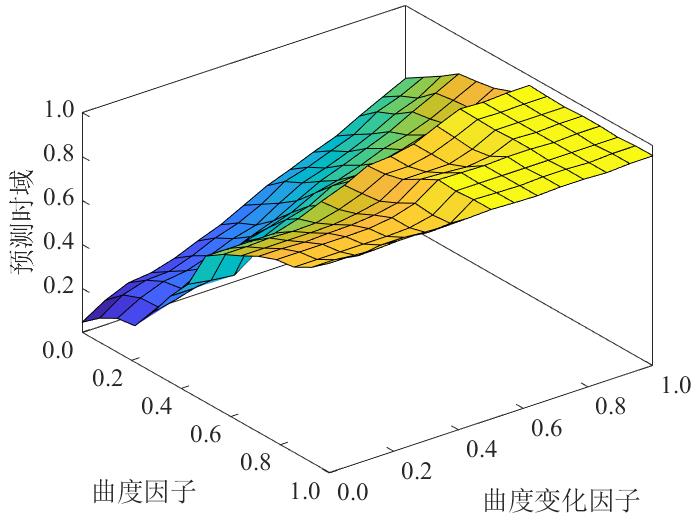

Fig. 10
Mowing robot platform


Fig. 11
Structure of lawn mower
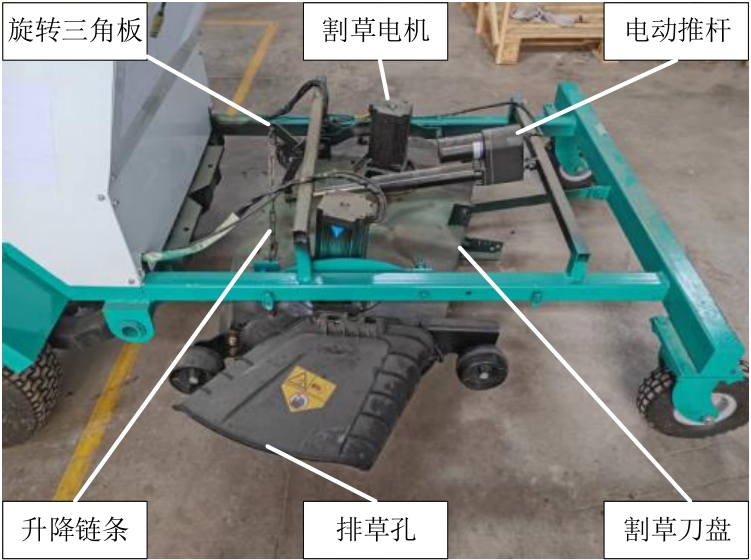

Fig. 12
Reference path for path tracking test of mowing robot


Fig. 13
Field testing of path tracking for mowing robots

Table 3
Experimental parameters for adaptive time horizon MPC control of mowing robots
| 参数 | 数值 |
|---|---|
| 采样周期 /s | 0.1 |
| 权重矩阵 | |
| 权重矩阵 | |
| 松弛因子最大值 | 1 |
| 松弛因子权重系数 | 10 |
| 最大线速度 /(m/s) | 2 |
| 最小线速度 /(m/s) | 0.3 |
| 预瞄区域最小长度 /m | 1.5 |
| 预瞄区域最大长度 /m | 5 |
| 时域权重系数 | 0.5 |
| 曲度变化增益系数 | 0.8 |
| 横向误差阈值 | 0.02 |
| 航向误差阈值 | 0.02 |
| 曲度因子阈值 | 0.5 |
| 曲度变化因子阈值 | 0.5 |

Fig. 14
Comparison of tracking effects on the expected path of mowing robots
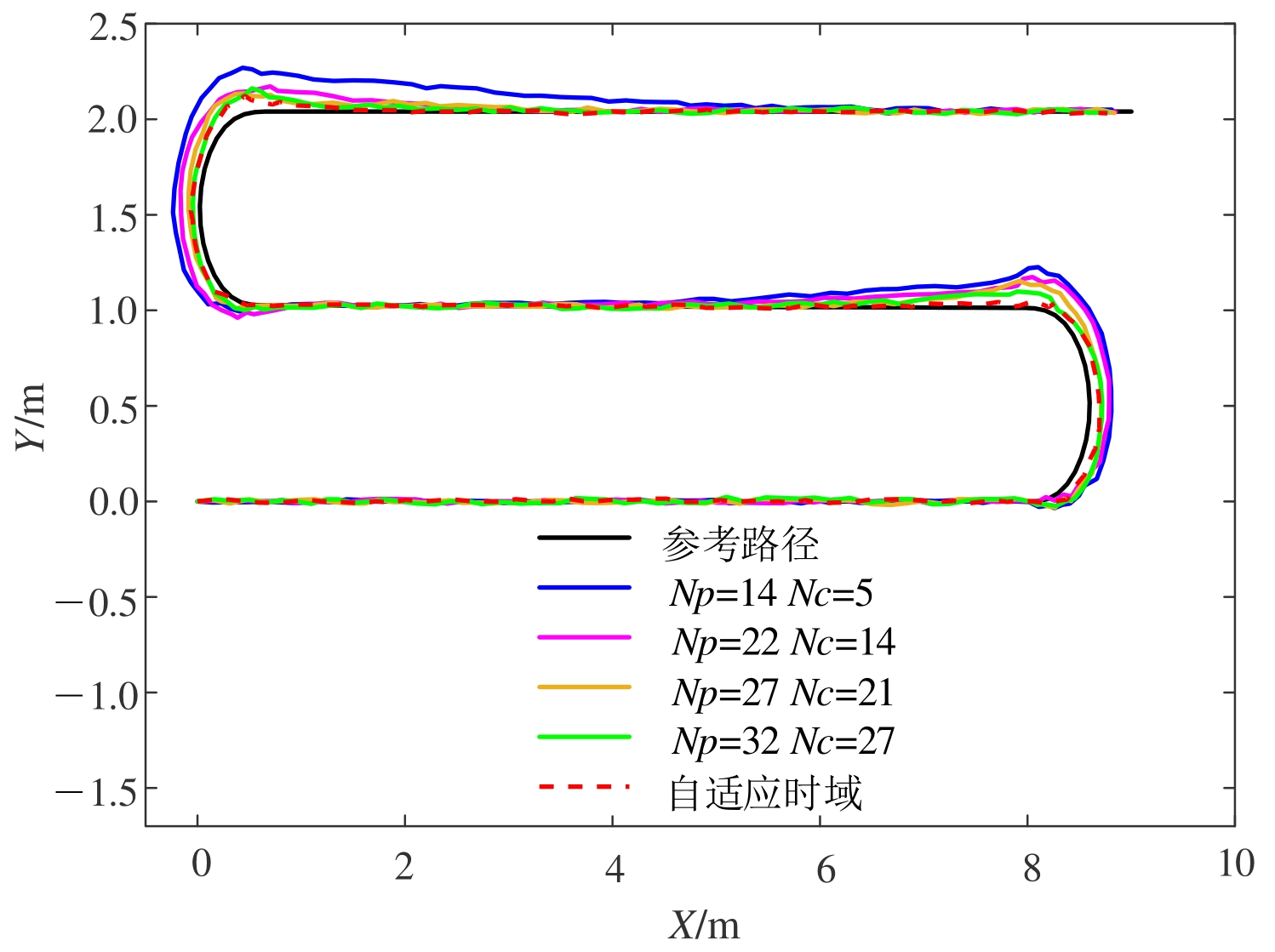
Fig. 15
Comparison chart of path tracking errors for mowing robots
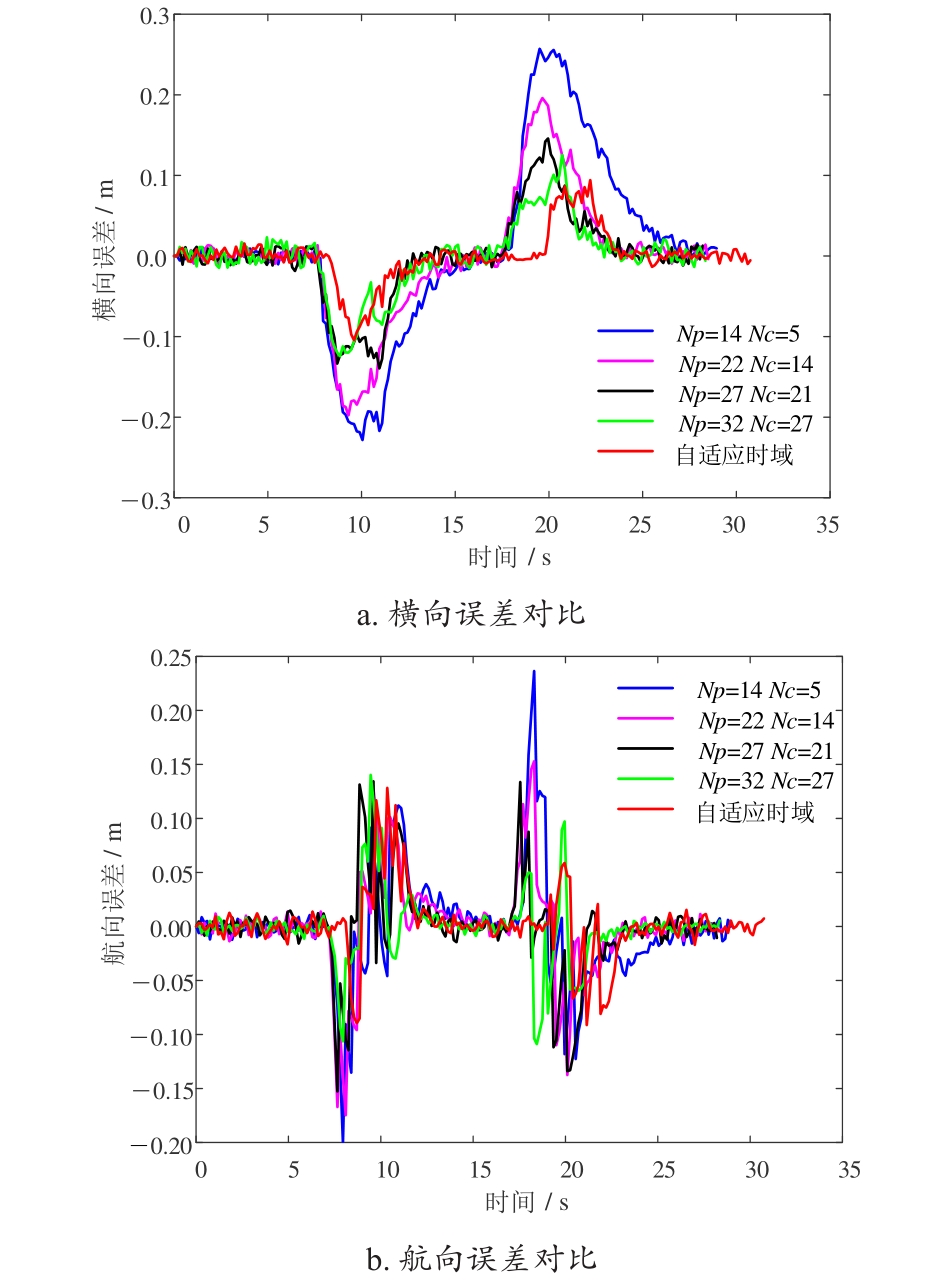
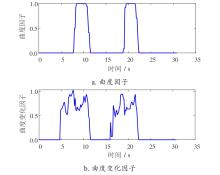
Fig. 16
Curvature factor and curvature variation factor of the preview area
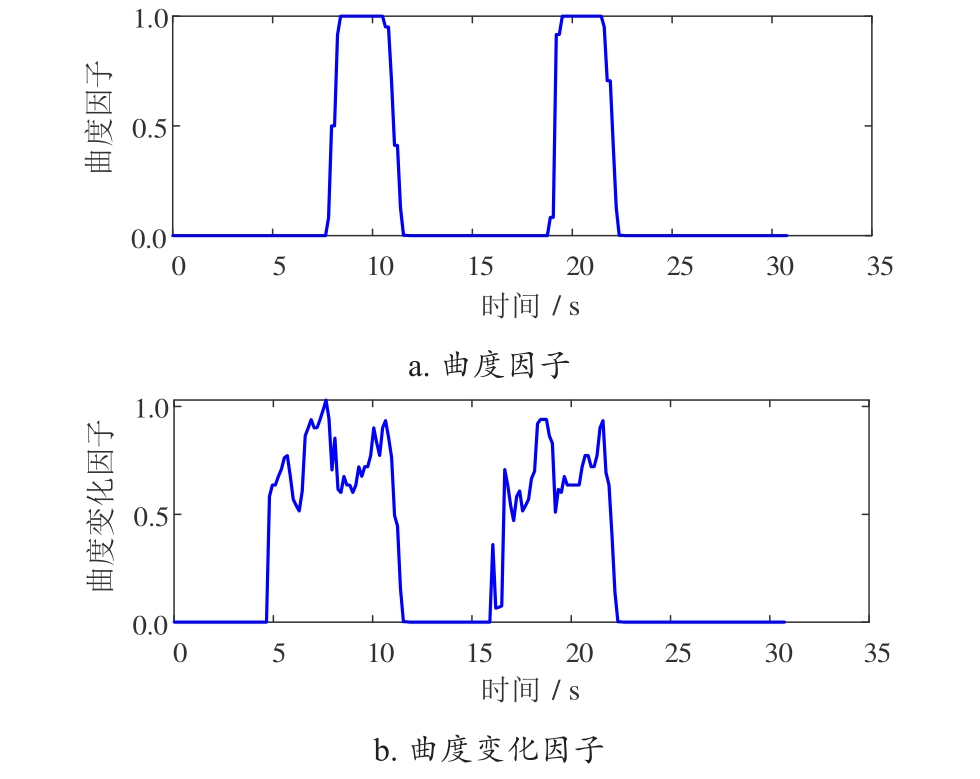
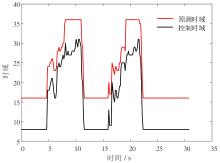
Fig.17
Adaptive time horizon MPC with predictive time horizon and control time horizon adaptive changes
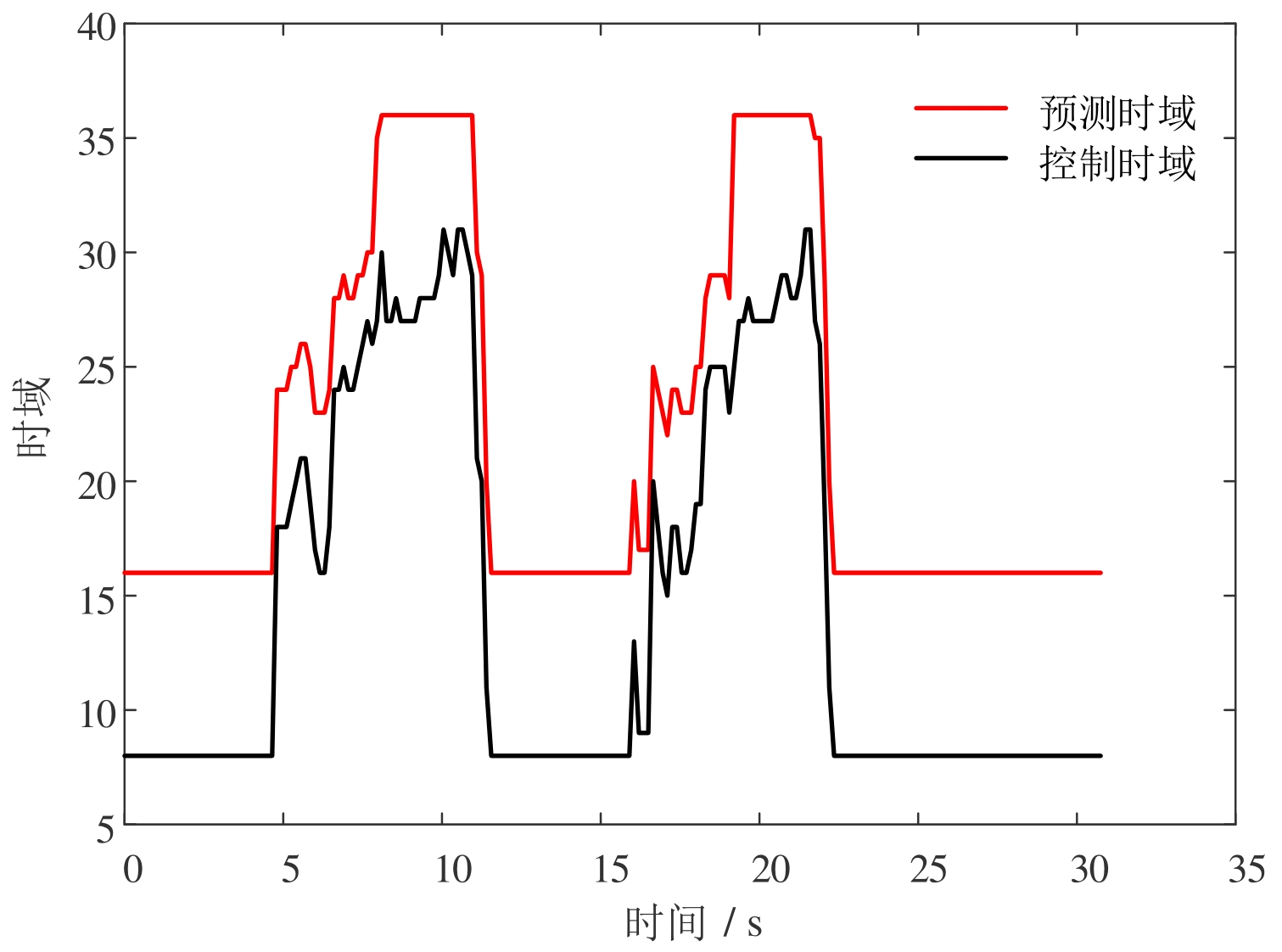
Table 4
MPC Control performance of fixed time horizon and adaptive time horizon in mowing robot experiment
| MPC预测时域 | 第1组
| 第2组
| 第3组
| 第4组
| 自适应时域 |
|---|---|---|---|---|---|
| MPC控制时域 | |||||
| /m | 0.257 2 | 0.197 8 | 0.145 9 | 0.125 4 | 0.104 5 |
| /m | 0.071 1 | 0.046 5 | 0.032 7 | 0.028 4 | 0.017 5 |
| /m | 0.082 8 | 0.060 6 | 0.041 9 | 0.033 0 | 0.025 6 |
| /rad | 0.236 5 | 0.174 8 | 0.152 8 | 0.140 3 | 0.128 3 |
| /rad | 0.039 6 | 0.033 7 | 0.027 8 | 0.024 5 | 0.016 7 |
| /rad | 0.041 0 | 0.037 5 | 0.035 0 | 0.029 4 | 0.025 5 |
| /s | 0.006 7 | 0.010 3 | 0.012 6 | 0.015 8 | 0.004 9 |
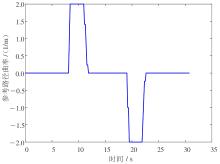
Fig. 18
Reference path curvature in mowing robots path tracking
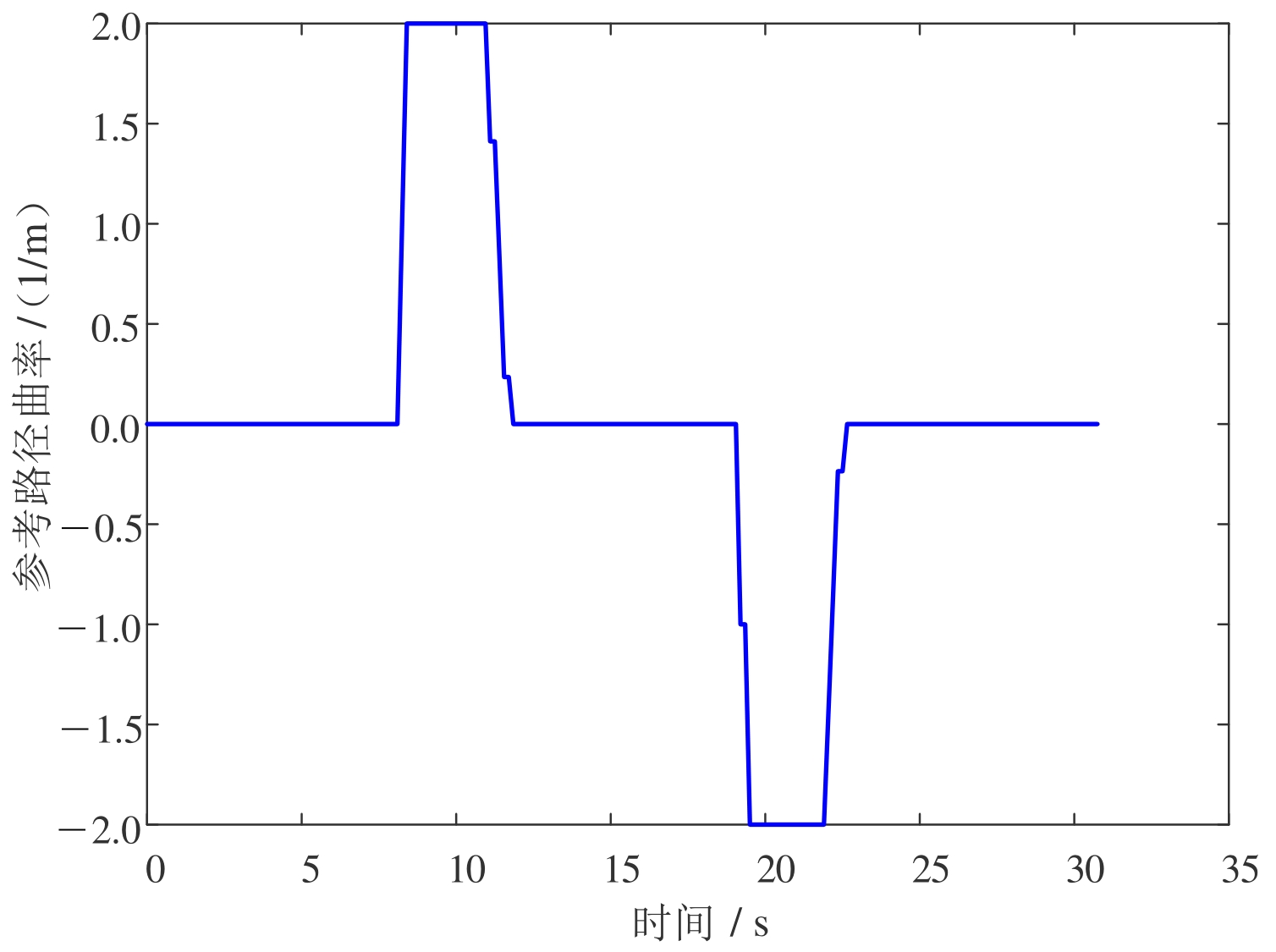

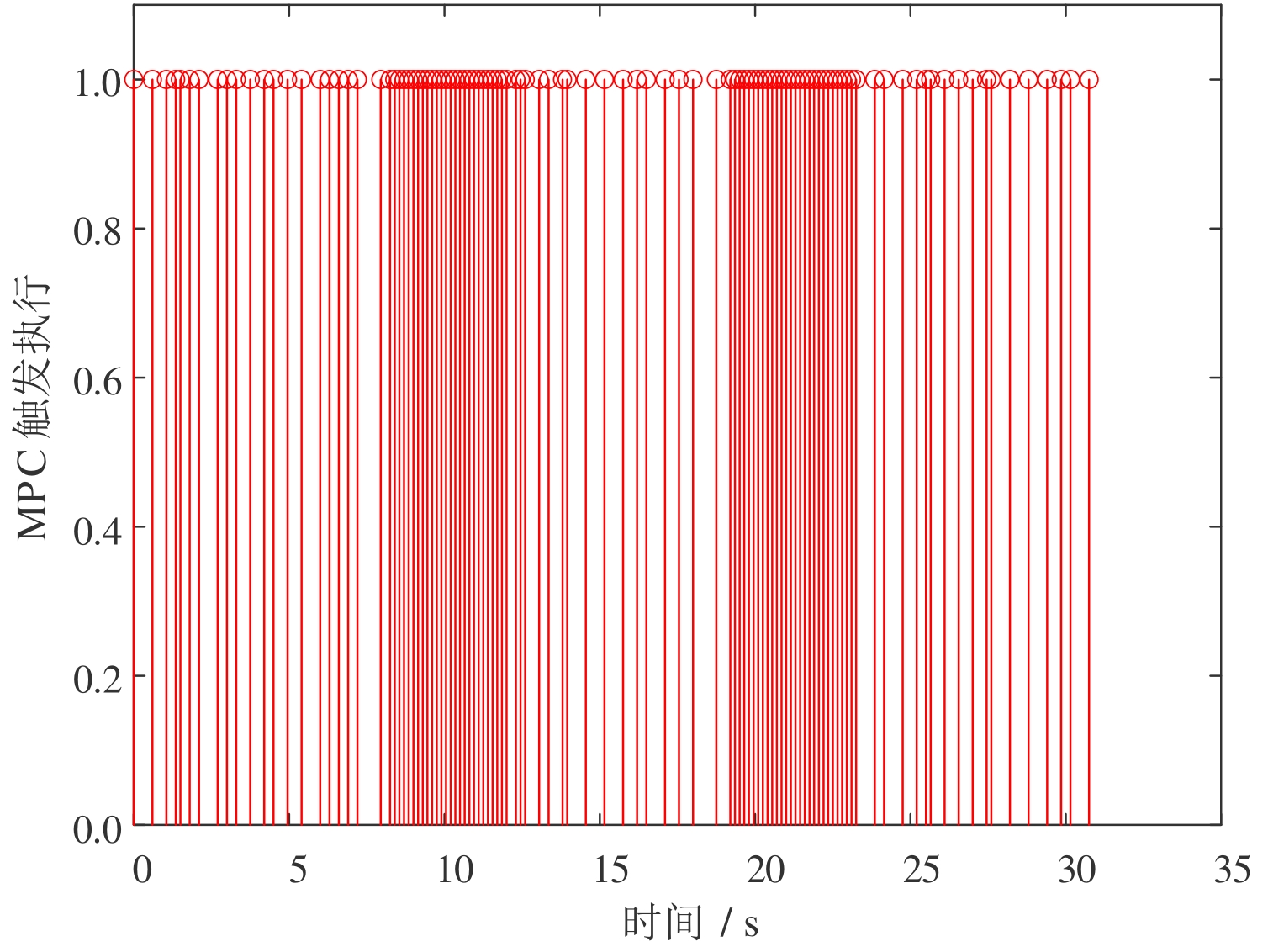
Fig. 19
Changes in event triggering execution times of adaptive time horizon MPC controller
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
丁承君, 施正, 冯玉伯, 等. 四轮驱动AGV自适应反演终端滑模轨迹跟踪控制[J]. 制造业自动化, 2023, 45(7): 139-144.
|
|
|
|
| 7 |
|
| 8 |
曹兴飞, 刘树锋, 史国友, 等. 基于模型预测控制的无人艇轨迹跟踪[J]. 船舶工程, 2023, 45(S1): 354-357.
|
|
|
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
李骏, 万文星, 郝三强, 等. 复杂路况下无人驾驶路径跟踪模型预测控制研究[J]. 汽车工程, 2022, 44(5): 664-674.
|
|
|
|
| 16 |
寇发荣, 郑文博, 张新乾, 等. 采用状态扩展MPC与转角补偿的无人车路径跟踪控制[J]. 机械科学与技术, 2023, 42(9): 1533-1541.
|
|
|
|
| 17 |
杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24): 275-288.
|
|
|
|
| 18 |
|
| 19 |
范贤波, 彭育辉, 钟聪. 基于自适应MPC的自动驾驶汽车轨迹跟踪控制[J]. 福州大学学报(自然科学版), 2021, 49(4): 500-507.
|
|
|
|
| 20 |
|
| 21 |
|
| 22 |
白国星, 孟宇, 刘立, 等. 基于可变预测时域及速度的车辆路径跟踪控制[J]. 中国机械工程, 2020, 31(11): 1277-1284.
|
|
|
|
| 23 |
|
| 24 |
龚建伟, 刘凯, 齐建永, 等. 无人驾驶车辆模型预测控制[M]. 北京: 人民邮电出版社, 2020.
|
|
|
|
| 25 |
李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539.
|
|
|
|
| 26 |
|
| 27 |
胡珉珉. 基于自适应模型预测控制的拖拉机路径跟踪控制研究[D]. 镇江: 江苏大学, 2022.
|
|
|
|
| 28 |
石佳晨. 基于MPC的智能稻麦收获机路径追踪方法研究[D]. 南京: 东南大学, 2020.
|
|
|
|
| 29 |
|
| 30 |
|
| [1] | LIU Zhiyong, WEN Changkai, XIAO Yuejin, FU Weiqiang, WANG Hao, MENG Zhijun. Path Tracking Control Algorithm of Tractor-Implement [J]. Smart Agriculture, 2023, 5(4): 58-67. |
| [2] | WANG Zijie, LIU Guohai, ZHANG Duo, SHEN Yue, YAO Zhen, ZHANG He. Path Following Model Predictive Control of Four Wheel Independent Drive High Ground Clearance Sprayer [J]. Smart Agriculture, 2021, 3(3): 82-93. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







