Smart Agriculture ›› 2024, Vol. 6 ›› Issue (5): 1-19.doi: 10.12133/j.smartag.SA202404006
• Overview Article • Previous Articles Next Articles
HE Yong1, HUANG Zhenyu1, YANG Ningyuan1, LI Xiyao1, WANG Yuwei2, FENG Xuping1,3( )
)
Received:2024-04-03
Online:2024-09-30
Foundation items:The Fundamental Research Funds for the Central Universities(226-2024-00038); National Natural Science Foundation of China(32071895)
About author:HE Yong, E-mail: yhe@zju.edu.cn
corresponding author:
CLC Number:
HE Yong, HUANG Zhenyu, YANG Ningyuan, LI Xiyao, WANG Yuwei, FENG Xuping. Research Progress and Prospects of Key Navigation Technologies for Facility Agricultural Robots[J]. Smart Agriculture, 2024, 6(5): 1-19.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202404006
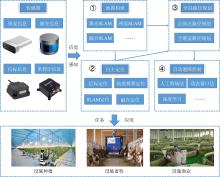
Fig. 1
Navigation key technologies for facility agricultural robots

Table 1
Comparison of commonly used sensors for facility agriculture localization
| 传感器 | 特点 | 适用环境 |
|---|---|---|
| RFID读写器 | 能同时识别多个标签,成本低 | 结构简单、面积不大的环境 |
| 车轮编码器 | 简单可靠,成本低,累积误差大 | 地面平整、干燥的环境 |
| IMU | 无需外部参考,精度较高 | 温度变化不大、磁场稳定的环境 |
| 相机 | 成本较低,提供图像RGB信息 | 纹理信息充足、光照变化小的环境 |
| 激光雷达 | 成本较高,距离信息精度高 | 几何信息充足、空间开阔的环境 |

Fig. 2
Implementation forms of UWB localization
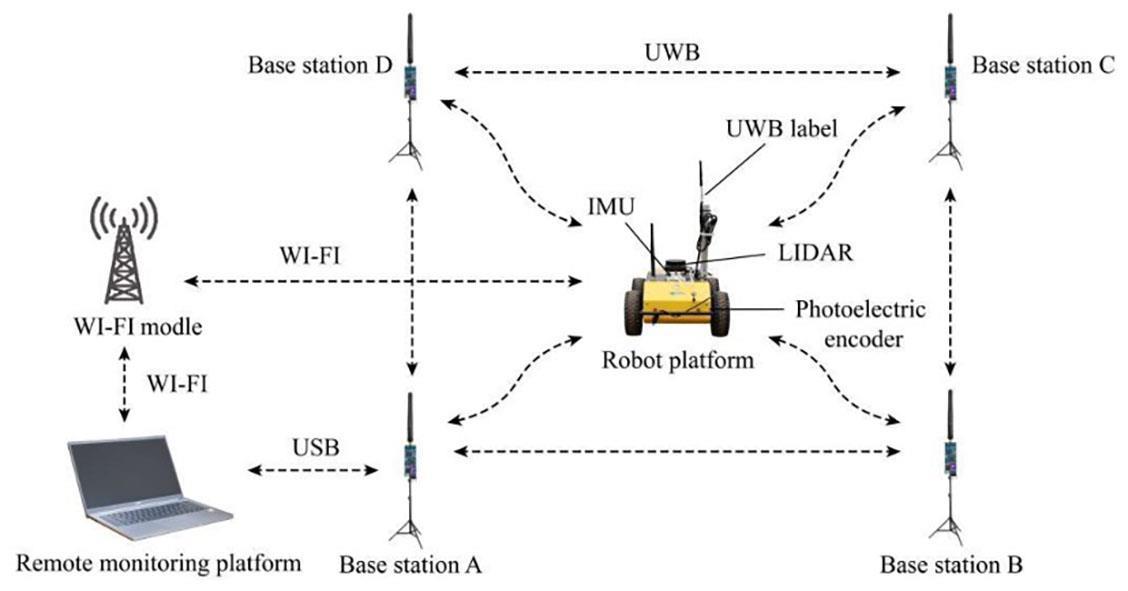
Table 2
Beacon localization method
| 方法 | 工作原理 | 优缺点 |
|---|---|---|
| UWB定位 | 利用发射极短宽带脉冲信号,测量信号的传播时间和频率变化,实现定位 | 精度较高,实时性强,多种场景都适用。大场景下布置成本高,传输距离受限 |
| RFID定位 | 射频信号收发,测量标签相对于读写器的距离。多个读写器协同工作实现精确定位 | 标签成本低,实时性较强。但信号传输距离有限,精度较低,信标布置要求高 |
Table 3
Types of inertial measurement unit
| 类型 | 测量原件 | 测量参数 |
|---|---|---|
| 三轴IMU | 三轴陀螺仪 | 角速度 |
| 六轴IMU | 三轴陀螺仪、三轴加速度计 | 角速度、线加速度 |
| 九轴IMU | 三轴陀螺仪、三轴加速度计、磁力计 | 角速度、线加速度、朝向 |
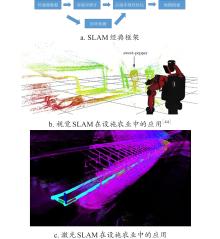
Fig. 3
The application of SLAM localization in facility agriculture

Table 4
Comparison of different visual SLAM
| 类型 | 算法 | 匹配目标 | 实时性 | 定位精度 |
|---|---|---|---|---|
| 直接法 | DTAM | 稠密像素 | 较低 | 高 |
| LSD-SLAM | 稀疏像素 | 中等 | 高 | |
| 基于特征 | Mono SLAM | 单目相机特征点 | 高 | 中等 |
| ORB-SLAM | ORB特征点 | 高 | 高 | |
| RTAM | 模板匹配 | 高 | 中等 |
Table 5
Comparison of different LiDAR SLAM
| 类型 | 算法 | 硬件成本 | 实时性 | 定位精度 |
|---|---|---|---|---|
| 单线 | Gmapping | 低 | 中等 | 中等 |
| Cartographer | 低 | 高 | 高 | |
| 多线 | LIO-SAM | 高 | 高 | 高 |
| Lego-LOAM | 中等 | 高 | 高 | |
| Cartographer 3D | 中等 | 高 | 高 |
Table 6
Data fusion types of localization algorithms
| 类型 | 信息损失 | 抗干扰能力 | 实时性 | 定位精度 |
|---|---|---|---|---|
| 数据级融合 | 少 | 差 | 低 | 高 |
| 特征级融合 | 中等 | 中等 | 中等 | 中等 |
| 决策级融合 | 多 | 强 | 高 | 低 |
Table 7
Global path planning algorithms in facility agriculture
| 算法名称 | 优化目标数量 | 优点 | 缺点 |
|---|---|---|---|
| Dijsktra算法 | 单目标 | 简单,易于实现,能找到最短路径 | 计算效率低,复杂度高 |
| A*算法 | 单目标 | 有效利用启发式信息进行搜索 | 需预先知道目标点位置,不适用于动态环境 |
| 快速扩展随机树(Rapidly-Exploring Random Tree,RRT)算法 | 单目标 | 能够在复杂环境中搜索出连续的路径 | 对高维空间和动态环境的处理能力有限 |
| 蚁群算法 | 多目标 | 具有分布式、自适应和全局搜索能力 | 收敛速度较慢,对问题规模和参数敏感 |
| 遗传算法 | 多目标 | 具有全局搜索和对复杂空间的优秀搜索能力 | 需要适当的编码方式和参数设置,收敛速度较慢 |
| 深度学习算法 | 多目标 | 能够通过学习训练生成高效的路径规划策略 | 训练需要大量的数据和计算资源 |
| 多目标进化算法 | 多目标 | 能够搜索出帕累托前沿的高质量均衡解 | 收敛速度较慢,需要适当的参数设置和运行时间 |
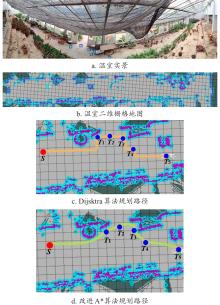
Fig. 4
Improvement of the A* algorithm in greenhouse scenario[84]

Fig. 5
Global path planning for multiple points and multiple targets inside greenhouses[96]
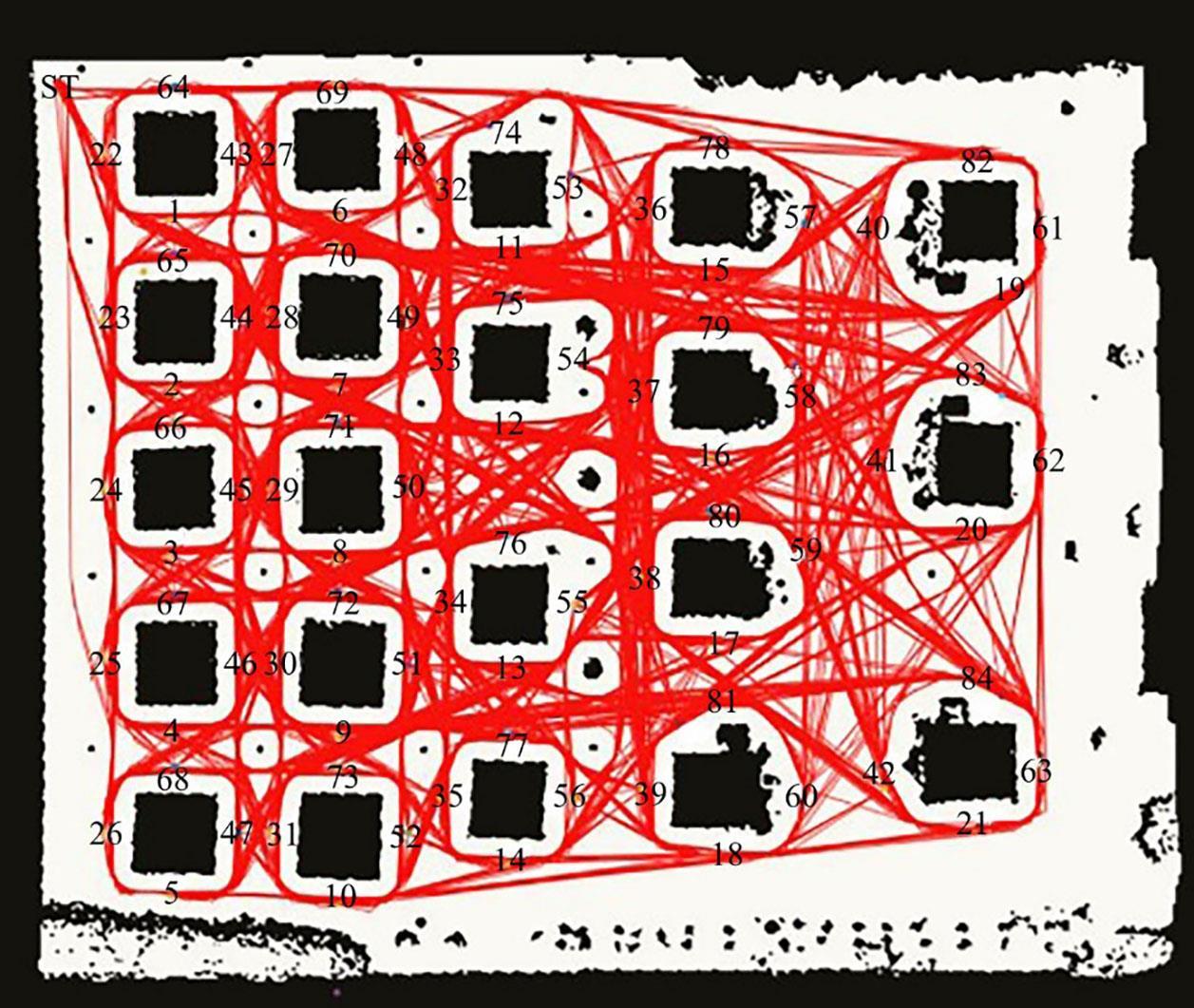
Fig. 6
Two classic global traversal path planning methods in facility agriculture
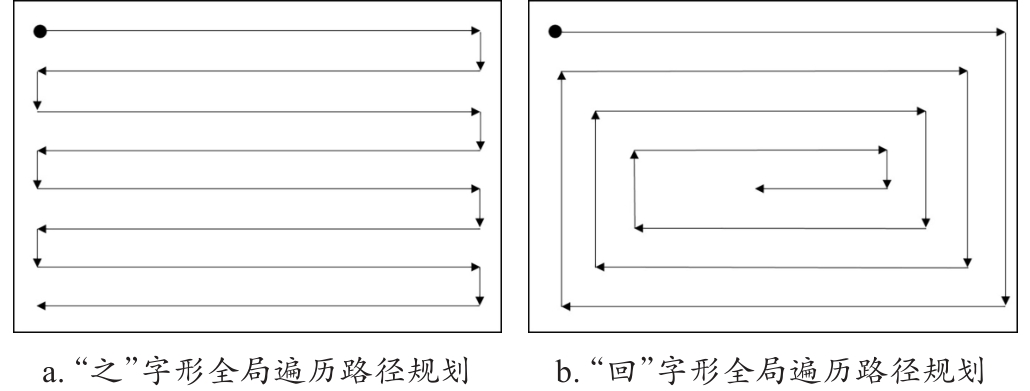
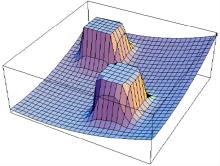
Fig. 7
Three-dimensional diagram of artificial potential field for obstacle avoidance
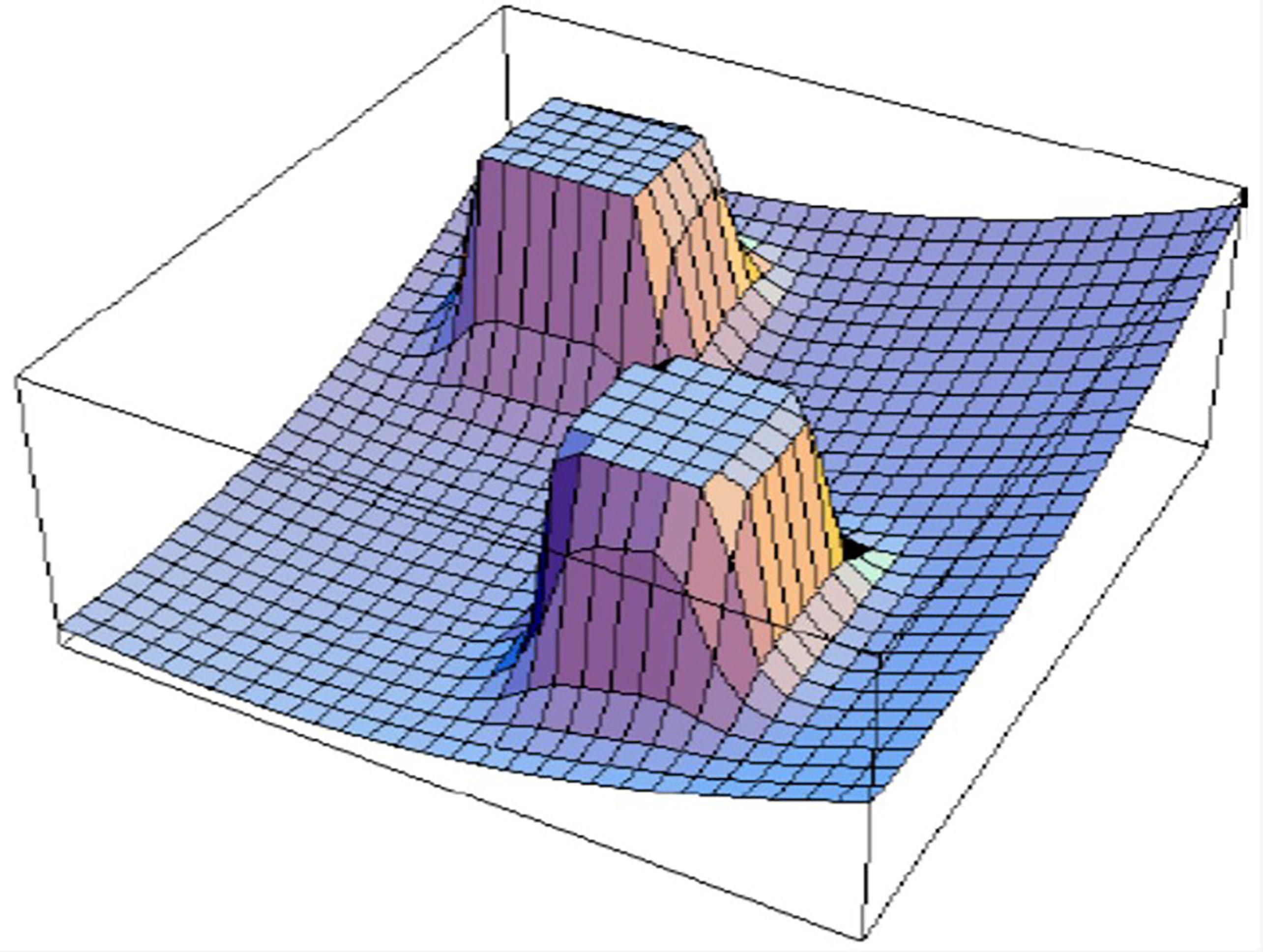
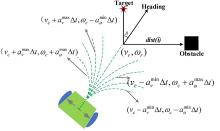
Fig. 8
Velocity sampling based on dynamic window approach
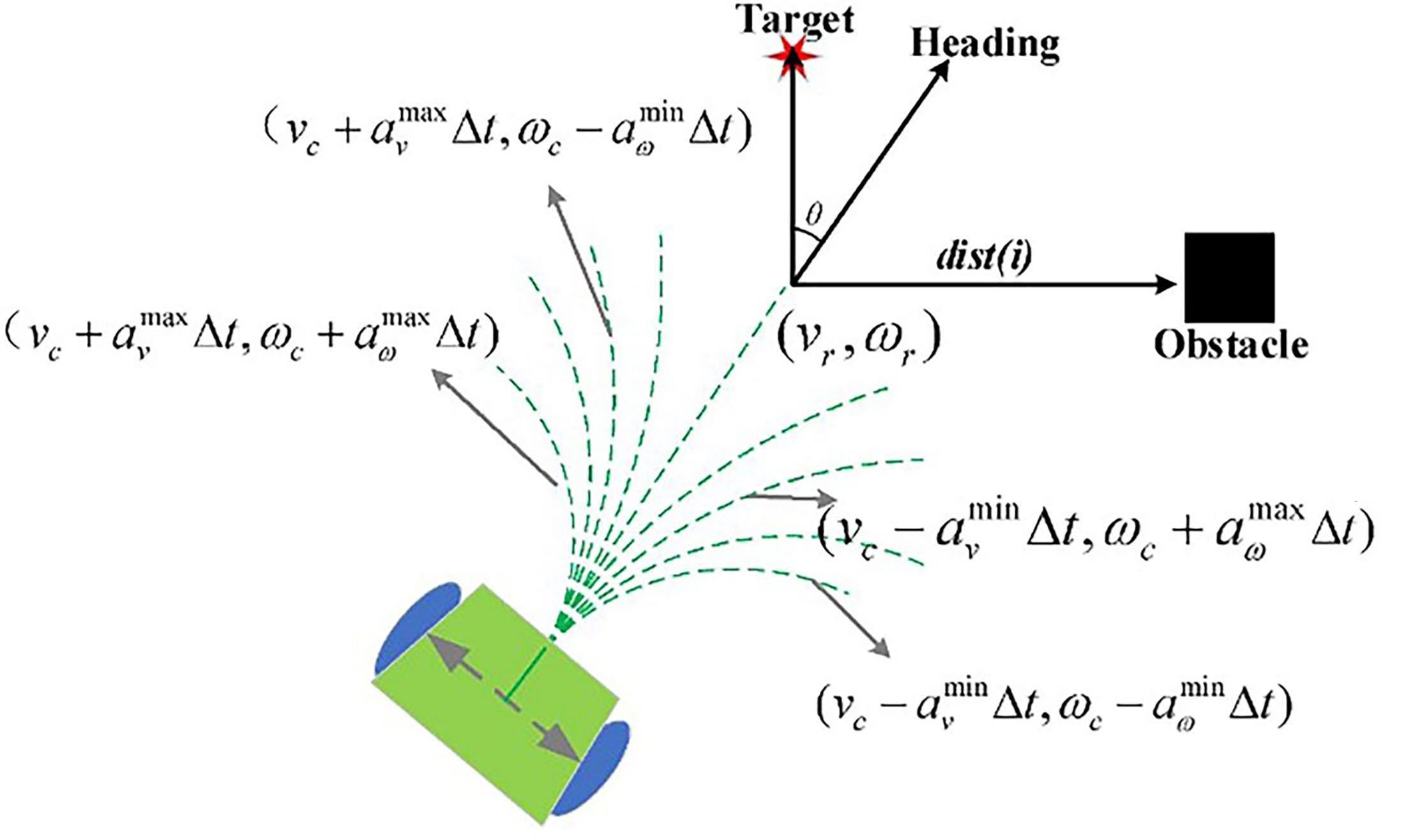

Fig. 9
Deep learning application in obstacle avoidance
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
吴雄伟, 周云成, 刘峻渟, 等. 面向温室移动机器人的无监督视觉里程估计方法[J]. 农业工程学报, 2023, 39(10): 163-174.
|
|
|
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
|
|
|
|
| 9 |
钱震杰, 金诚谦, 刘政, 等. 无人农场中的智能控制技术应用现状与趋势[J]. 智能化农业装备学报(中英文), 2023, 4 (3): 1-13.
|
|
|
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
冯青春, 王秀, 邱权, 等. 畜禽舍防疫消毒机器人设计与试验[J]. 智慧农业(中英文), 2020, 2(4): 79-88.
|
|
|
|
| 14 |
徐济双, 焦俊, 李淼, 等. 融合改进A*算法与模糊PID的病死畜禽运输机器人路径规划与运动控制方法[J]. 智慧农业(中英文), 2023, 5(4): 127-136.
|
|
|
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
崔鑫宇, 崔冰波, 马振, 等. 几何路径跟踪组合算法及其农业机械自动导航应用[J]. 智能化农业装备学报(中英文), 2023(3): 24-31.
|
|
|
|
| 31 |
|
| 32 |
毕松, 张国轩, 李志军, 等. 基于测距值修正的温室植保机器人定位方法[J]. 农业机械学报, 2023, 54(8): 347-358.
|
|
|
|
| 33 |
|
| 34 |
|
| 35 |
|
| 36 |
|
| 37 |
|
| 38 |
兰玉彬, 闫瑜, 王宝聚, 等. 智能施药机器人关键技术研究现状及发展趋势[J]. 农业工程学报, 2022, 38(20): 30-40.
|
|
|
|
| 39 |
|
| 40 |
|
| 41 |
|
| 42 |
|
| 43 |
|
| 44 |
|
| 45 |
|
| 46 |
|
| 47 |
|
| 48 |
|
| 49 |
|
| 50 |
|
| 51 |
|
| 52 |
|
| 53 |
|
| 54 |
|
| 55 |
|
| 56 |
|
| 57 |
|
| 58 |
|
| 59 |
|
| 60 |
|
| 61 |
|
| 62 |
|
| 63 |
|
| 64 |
|
| 65 |
|
| 66 |
季宇寒, 李寒, 张漫, 等. 基于激光雷达的巡检机器人导航系统研究[J]. 农业机械学报, 2018, 49(2): 14-21.
|
|
|
|
| 67 |
|
| 68 |
胡勇兵, 倪琦, 黄达, 等. 工厂化循环水养殖鱼池清刷机器人的定位精度分析[J]. 渔业现代化, 2021, 48(2): 16-21, 28.
|
|
|
|
| 69 |
|
| 70 |
|
| 71 |
|
| 72 |
|
| 73 |
|
| 74 |
|
| 75 |
谢天轩. 多传感器融合的温室植保机器人建图导航系统设计与实现[D]. 南京: 南京信息工程大学, 2023.
|
| 76 |
|
| 77 |
|
| 78 |
孙国祥, 黄银锋, 汪小旵, 等. 基于LIO-SAM建图和激光视觉融合定位的温室自主行走系统[J]. 农业工程学报, 2024, 40(3): 227-239.
|
|
|
|
| 79 |
|
| 80 |
OHI N,
|
| 81 |
PAK J,
|
| 82 |
|
| 83 |
|
| 84 |
|
| 85 |
劳彩莲, 李鹏, 冯宇. 基于改进A*与DWA算法融合的温室机器人路径规划[J]. 农业机械学报, 2021, 52(1): 14-22.
|
|
|
|
| 86 |
高兴旺, 任力生, 王芳. 番茄温室内移动喷药机器人的路径规划研究[J]. 计算机工程与应用, 2024, 60(16):325-332.
|
|
|
|
| 87 |
|
| 88 |
王红君, 付勇, 岳有军, 等. 基于并行蚁群算法的设施温室机器人多点路径规划的研究[J]. 江苏农业科学, 2019, 47(17): 237-241.
|
|
|
|
| 89 |
罗智杰, 黄子涛, 许嘉志, 等. 基于改进蚁群算法的多农业机器人路径规划研究[J]. 现代农业装备, 2021, 42(3): 56-62, 68.
|
|
|
|
| 90 |
|
| 91 |
丁久阳. 基于改进RRT的温室移动机器人路径规划[D]. 合肥: 安徽农业大学, 2022.
|
|
|
|
| 92 |
|
| 93 |
|
| 94 |
|
| 95 |
|
| 96 |
|
| 97 |
|
| 98 |
|
| 99 |
|
| 100 |
|
| 101 |
王宁, 韩雨晓, 王雅萱, 等. 农业机器人全覆盖作业规划研究进展[J]. 农业机械学报, 2022, 53(S1): 1-19.
|
|
|
|
| 102 |
|
| 103 |
|
| 104 |
|
| 105 |
|
| 106 |
|
| 107 |
|
| 108 |
|
| 109 |
|
| 110 |
|
| 111 |
|
| 112 |
|
| 113 |
|
| 114 |
|
| 115 |
|
| 116 |
|
| 117 |
|
| 118 |
|
| 119 |
|
| 120 |
|
| 121 |
张金泽, 赵红, 王宁, 等. 密集障碍物下无人艇模糊双窗口DWA避障算法[J]. 中国舰船研究, 2021, 16(6): 10-18.
|
|
|
|
| 122 |
|
| 123 |
|
| 124 |
|
| [1] | CHEN Ruotong, LIU Jifang, ZHANG Zhiyong, MA Nan, WEI Peigang, WANG Yi, YANG Yantao. Intelligent Inspection Path Planning Algorithm for Large-Scale Cattle Farms [J]. Smart Agriculture, 2026, 8(1): 178-191. |
| [2] | LI Lei, SHE Xiaoming, TANG Xinglong, ZHANG Tao, DONG Jiwei, GU Yuchuan, ZHOU Xiaohui, FENG Wei, YANG Qinghui. Obstacle Avoidance Control Method of Electric Skid-Steering Chassis Based on Fuzzy Logic Control [J]. Smart Agriculture, 2026, 8(1): 213-225. |
| [3] | LU Zaiwang, ZHANG Yucheng, MA Yike, DAI Feng, DONG Jie, WANG Peng, LU Huixian, LI Tongbin, ZHAO Kaibin. Progress and Prospects of Research on Key Technologies for Agricultural Multi-Robot Full Coverage Operations [J]. Smart Agriculture, 2025, 7(5): 17-36. |
| [4] | CHEN Junlin, ZHAO Peng, CAO Xianlin, NING Jifeng, YANG Shuqin. Lightweight YOLOv8s-Based Strawberry Plug Seedling Grading Detection and Localization via Channel Pruning [J]. Smart Agriculture, 2024, 6(6): 132-143. |
| [5] | FAN Mingshuo, ZHOU Ping, LI Miao, LI Hualong, LIU Xianwang, MA Zhirun. Automatic Navigation and Spraying Robot in Sheep Farm [J]. Smart Agriculture, 2024, 6(4): 103-115. |
| [6] | LIU Yang, JI Jie, PAN Deng, ZHAO Lijun, LI Mingsheng. Localization Method for Agricultural Robots Based on Fusion of LiDAR and IMU [J]. Smart Agriculture, 2024, 6(3): 94-106. |
| [7] | ZHAO Chunjiang, FAN Beibei, LI Jin, FENG Qingchun. Agricultural Robots: Technology Progress, Challenges and Trends [J]. Smart Agriculture, 2023, 5(4): 1-15. |
| [8] | CHEN Ruiyun, TIAN Wenbin, BAO Haibo, LI Duan, XIE Xinhao, ZHENG Yongjun, TAN Yu. Three-Dimensional Environment Perception Technology for Agricultural Wheeled Robots: A Review [J]. Smart Agriculture, 2023, 5(4): 16-32. |
| [9] | XU Jishuang, JIAO Jun, LI Miao, LI Hualong, YANG Xuanjiang, LIU Xianwang, GUO Panpan, MA Zhirun. Path Planning and Motion Control Method for Sick and Dead Animal Transport Robots Integrating Improved A * Algorithm and Fuzzy PID [J]. Smart Agriculture, 2023, 5(4): 127-136. |
| [10] | ZHOU Longgang, LIU Ting, LU Jinzhu. Traversal Path Planning for Farmland in Hilly Areas Based on Floyd and Improved Genetic Algorithm [J]. Smart Agriculture, 2023, 5(4): 45-57. |
| [11] | LIU Limin, HE Xiongkui, LIU Weihong, LIU Ziyan, HAN Hu, LI Yangfan. Autonomous Navigation and Automatic Target Spraying Robot for Orchards [J]. Smart Agriculture, 2022, 4(3): 63-74. |
| [12] | CHEN Xuegeng, WEN Haojun, ZHANG Weirong, PAN Fochu, ZHAO Yan. Advances and Progress of Agricultural Machinery and Sensing Technology Fusion [J]. Smart Agriculture, 2020, 2(4): 1-16. |
| [13] | WANG Chunlei, LI Hongwen, HE Jin, WANG Qingjie, LU Caiyun, CHEN Liping. State-of-the-Art and Prospect of Automatic Navigation and Measurement Techniques Application in Conservation Tillage [J]. Smart Agriculture, 2020, 2(4): 41-55. |
| [14] | DING Youchun, WANG Xuping, PENG Jingye, XIA Zhongzhou. Visual Navigation System for Wheel-Type Grain Combine Harvester [J]. Smart Agriculture, 2020, 2(4): 89-102. |
| [15] | Wu Caicong, Fang Xiangming. Development of precision service system for intelligent agriculture field crop production based on BeiDou system [J]. Smart Agriculture, 2019, 1(4): 83-90. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







