| 1 |
SHI J Y, BAI Y H, DIAO Z H, et al. Row detection BASED navigation and guidance for agricultural robots and autonomous vehicles in row-crop fields: Methods and applications[J]. Agronomy, 2023, 13(7): ID 1780.
|
| 2 |
QU F H, DING T Y, ZHENG X M, et al. Verification of farmland crop row direction recognition method based on plot morphological characteristics[J]. Remote sensing technology and application, 2024, 39(5): 1213-1222.
|
| 3 |
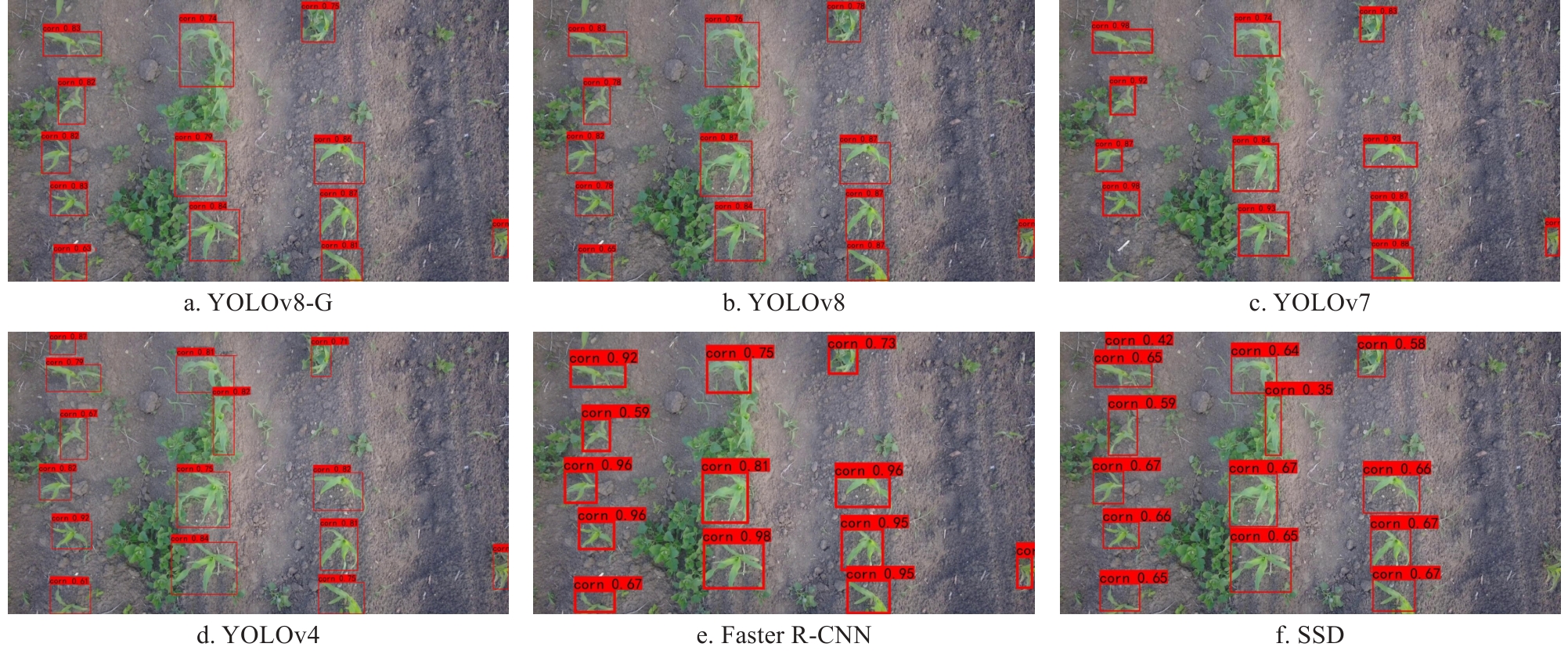
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[EB/OL]. arXiv: 2004.10934, 2020.
|
| 4 |
YANG Z L, YANG Y, LI C R, et al. Tasseled crop rows detection based on micro-region of interest and logarithmic transformation[J]. Frontiers in plant science, 2022, 13: ID 916474.
|
| 5 |
FU D B, JIANG Q, QI L, et al. Detection of the centerline of rice seedling belts based on region growth sequential clustering-RANSAC[J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(7): 47-57.
|
| 6 |
ZHAI Z Q, XIONG K, WANG L, et al. Crop row detection and tracking based on binocular vision and adaptive Kalman filter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(8): 143-151.
|
| 7 |
PONNAMBALAM V R, BAKKEN M, MOORE R J D, et al. Autonomous crop row guidance using adaptive multi-ROI in strawberry fields[J]. Sensors, 2020, 20(18): ID 5249.
|
| 8 |
LIU X, HU C H, LI P P. Automatic segmentation of overlapped poplar seedling leaves combining Mask R-CNN and DBSCAN[J]. Computers and electronics in agriculture, 2020, 178: ID 105753.
|
| 9 |
DE SILVA R, CIELNIAK G, WANG G, et al. Deep learning-based crop row detection for infield navigation of agri-robots[J]. Journal of field robotics, 2024, 41(7): 2299-2321.
|
| 10 |
DE SILVA R, CIELNIAK G, GAO J F, et al. Towards agricultural autonomy: Crop row detection under varying field conditions using deep learning[EB/OL]. arXiv:2109.08247, 2021.
|
| 11 |
WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, New Jersey, USA: IEEE, 2023: 7464-7475.
|
| 12 |
ZHENG Z Y, LI J W, QIN L F. YOLO-BYTE: An efficient multi-object tracking algorithm for automatic monitoring of dairy cows[J]. Computers and electronics in agriculture, 2023, 209: ID 107857.
|
| 13 |
ZHANG L M, LIU G W, QI Y D, et al. Research progress on key technologies of agricultural machinery unmanned driving system[J]. Journal of intelligent agricultural mechanization, 2022, 3(1): 27-36.
|
| 14 |
CUI X Y, CUI B B, MA Z, et al. Integration of geometric-based path tracking controller and its application in agricultural machinery automatic navigation[J]. Journal of intelligent agricultural mechanization, 2023, 4(3): 24-31.
|
| 15 |
Liu W, Anguelov D, Erhan D, et al. Ssd: Single shot multibox detector[C]// Computer Vision–ECCV 2016: 14th European Conference. Berlin, Germany: Springer, 2016: 21-37.
|
| 16 |
REN S, HE K, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE transactions on pattern analysis and machine intelligence, 2017, 39(6): 1137-1149.
|
| 17 |
BOOGAARD F P, RONGEN K S A H, KOOTSTRA G W. Robust node detection and tracking in fruit-vegetable crops using deep learning and multi-view imaging[J]. Biosystems engineering, 2020, 192: 117-132.
|
| 18 |
SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. arXiv: 1409.1556, 2014.
|
| 19 |
HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, New Jersey, USA: IEEE, 2016: 770-778.
|
| 20 |
HOWARD A G, ZHU M L, CHEN B, et al. MobileNets: Efficient convolutional neural networks for mobile vision applications[EB/OL]. arXiv: 1704.04861, 2017.
|
| 21 |
SANDLER M, HOWARD A, ZHU M L, et al. MobileNetV2: Inverted residuals and linear bottlenecks[C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, New Jersey, USA: IEEE, 2018: 4510-4520.
|
| 22 |
HOWARD A, SANDLER M, CHEN B, et al. Searching for MobileNetV3[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway, New Jersey, USA: IEEE, 2019: 1314-1324.
|
| 23 |
HAN K, WANG Y H, TIAN Q, et al. GhostNet: More features from cheap operations[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, New Jersey, USA: IEEE, 2020: 1580-1589.
|
| 24 |
TANG Y, HAN K, GUO J, et al. GhostNetv2: Enhance cheap operation with long-range attention[J]. Advances in Neural Information Processing Systems, 2022, 35: 9969-9982.
|
| 25 |
SHI J Y, BAI Y H, ZHOU J, et al. Multi-crop navigation line extraction based on improved YOLOv8 and threshold-DBSCAN under complex agricultural environments[J]. Agriculture, 2023, 14(1): ID 45.
|
| 26 |
LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]// 2017 IEEE International Conference on Computer Vision (ICCV). Piscataway, New Jersey, USA: IEEE, 2017: 2980-2988.
|
| 27 |
CHI J, GUO S, ZHANG H, et al. L-GhostNet: Extract better quality features[J]. IEEE Access, 2023, 11: 2361-2374.
|
| 28 |
LIU F C, YANG Y, ZENG Y M, et al. Bending diagnosis of rice seedling lines and guidance line extraction of automatic weeding equipment in paddy field[J]. Mechanical systems and signal processing, 2020, 142: ID 106791.
|
| 29 |
GARCÍA-SANTILLÁN I D, PAJARES G. On-line crop/weed discrimination through the Mahalanobis distance from images in maize fields[J]. Biosystems engineering, 2018, 166: 28-43.
|
| 30 |
DIAO Z H, GUO P L, ZHANG B H, et al. Maize crop row recognition algorithm based on improved UNet network[J]. Computers and electronics in agriculture, 2023, 210: ID 107940.
|
| 31 |
NAN Y L, ZHANG H C, ZENG Y, et al. Intelligent detection of Multi-Class pitaya fruits in target picking row based on WGB-YOLO network[J]. Computers and electronics in agriculture, 2023, 208: ID 107780.
|
| 32 |
CHEN J Q, QIANG H, WU J H, et al. Navigation path extraction for greenhouse cucumber-picking robots using the prediction-point Hough transform[J]. Computers and electronics in agriculture, 2021, 180: ID 105911.
|
 ), TIAN Xin1,2(
), TIAN Xin1,2(