Smart Agriculture ›› 2025, Vol. 7 ›› Issue (4): 141-158.doi: 10.12133/j.smartag.SA202505008
• Overview Article • Previous Articles Next Articles
WEI Peigang1,2, CAO Shanshan1,2, LIU Jifang1,2, LIU Zhenhu4, SUN Wei1,2( ), KONG Fantao2,3()
), KONG Fantao2,3()
Received:2025-05-09
Online:2025-07-30
Foundation items:National Key R&D Programme Project(2024YFD2000305); Science and Technology Innovation Project of the Chinese Academy of Agricultural Sciences(10-IAED-RC-09-2025)
About author:WEI Peigang, E-mail: wpg0115@163.com
corresponding author:
CLC Number:
WEI Peigang, CAO Shanshan, LIU Jifang, LIU Zhenhu, SUN Wei, KONG Fantao. Embodied Intelligent Agricultural Robots: Key Technologies, Application Analysis, Challenges and Prospects[J]. Smart Agriculture, 2025, 7(4): 141-158.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202505008
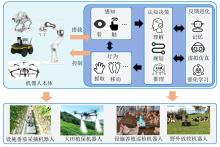
Fig. 1
The connotation and application fields of embodied intelligent agricultural robots
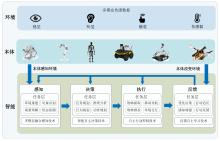
Fig. 2
Key technology system of embodied intelligence


Fig. 3
The encoder-decoder architecture of MAT
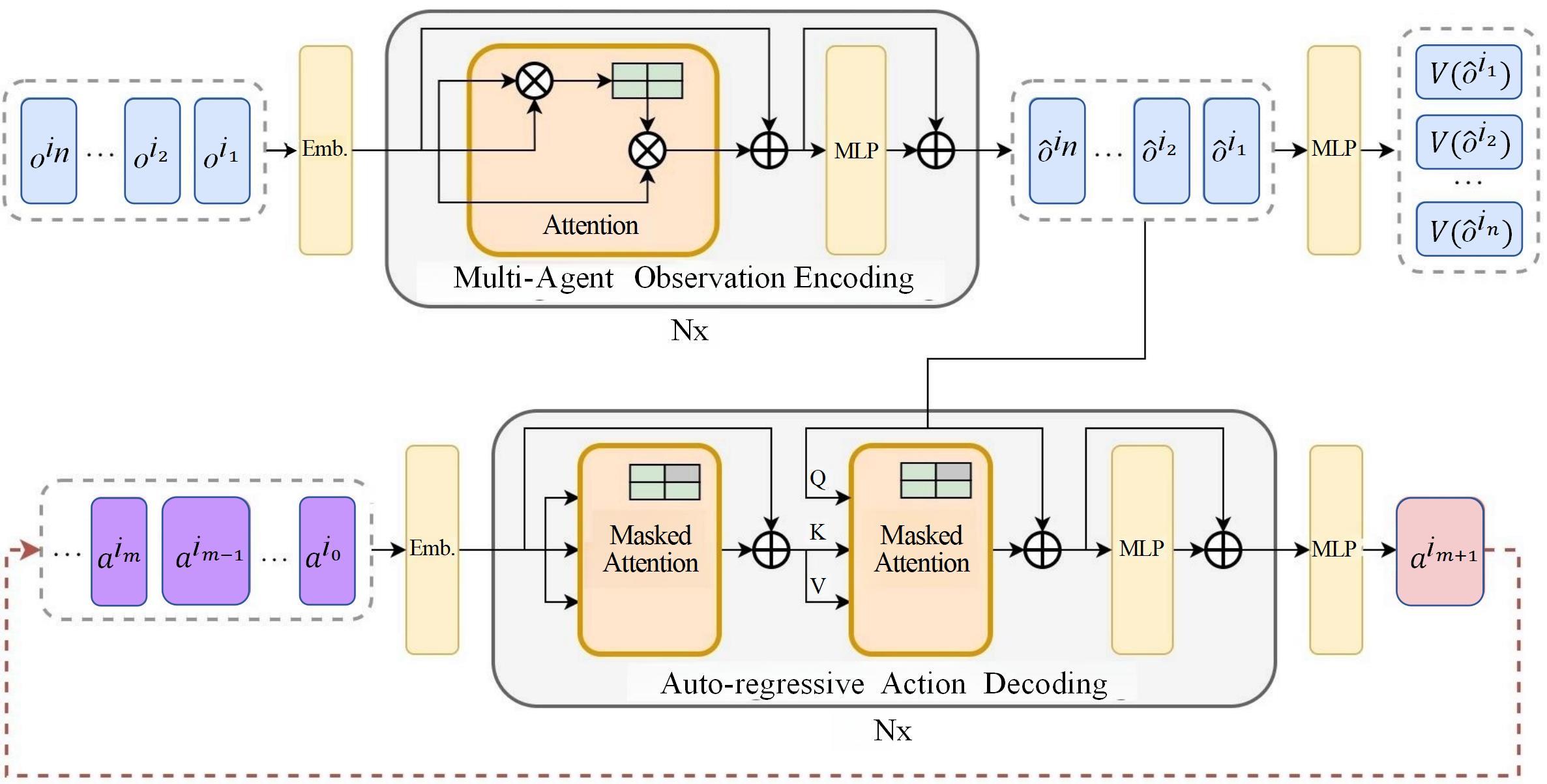

Fig. 4
Schematic diagram of the three elements of embodied intelligence: substance-environment-intelligence


Fig. 5
Application scenarios of embodied intelligence in agricultural robots
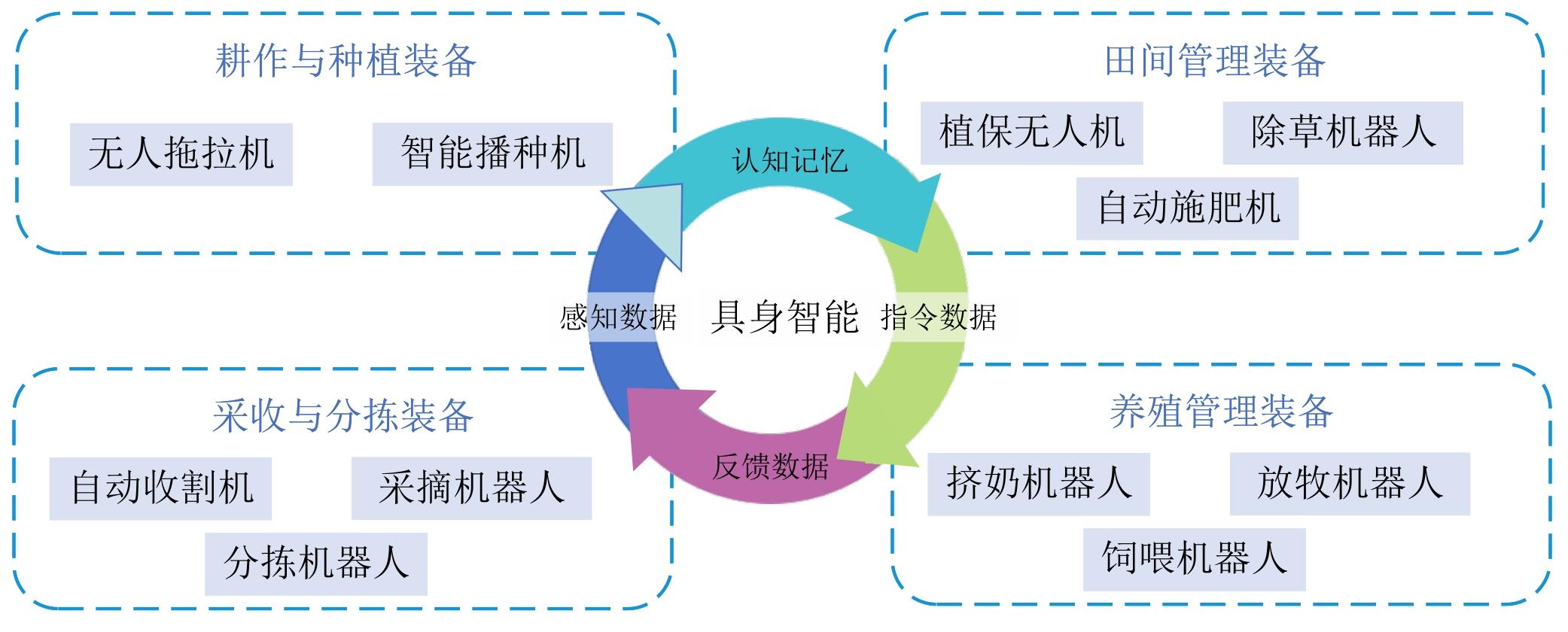

Fig. 6
Core framework of embodied intelligent agricultural robot

Table 1
Representative work in different technical directions of embodied perception
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 多模态信息融合 | 基于线性的融合 | 简单易用,适用性强,可处理同质或异质数据,具有较低的计算复杂度 | 难以充分利用不同模态在语义、空间或时间层次上的深层互补性,复杂交互建模能力有限 | [ |
| 基于多流分支的融合 | 更强的模态互补性,易于扩展更多模态分支,适应多源异构数据场景 | 计算复杂度高,对各模态数据质量要求较高,对噪声与数据缺失敏感 | [ | |
| 基于多阶段的渐进式融合 | 通过渐进式融合避免信息排斥,允许不同模态在各级别交互 | 模型复杂度与计算成本高、动态适应性局限、各阶段融合依赖性强 | [ | |
| 基于Transformer的融合 | 强大的特征提取能力,通过整合浅层特征,能够保留更多的细节信息 | 模态对齐效果需要进一步优化,模型的复杂性和计算效率仍需平衡 | [ | |
| 动态场景三维感知 | 基于视觉的三维感知 | 硬件成本低,物体色彩和纹理信息丰富,可融合多帧信息进行结构恢复,较强的场景理解能力 | 对光照变化敏感,易受遮挡和低纹理区域影响;几何精度和深度估计依赖结构假设,鲁棒性较差;跟踪和重建精度低,易失效于动态物体 | [ |
| 基于LiDAR的三维感知 | 能够提供高精度的3D动态目标位置信息,环境鲁棒性强,易于构建高精地图和物体检测 | 硬件成本高,模型训练推理成本大;点云数据存在稀疏性和不规则性,数据处理和分析比其他数据更为复杂 | [ | |
| 基于跨模态知识蒸馏的三维感知 | 利用教师模型监督学生模型,融合LiDAR的几何精度与视觉的语义信息,提升检测鲁棒性;可实现轻量化部署,适用于资源受限平台 | 蒸馏过程依赖高质量标签或教师模型,训练成本高;模态差异大时易导致知识迁移失效,蒸馏性能受限于教师模型质量与模态对齐程度 | [ | |
| 场景自适应 | 无监督领域自适应 | 无需目标域标注,适用于真实场景中标注缺失或成本高昂的情况;通过生成对抗网络、自编码器等方法对齐源域与目标域特征分布,迁移范围广 | 难以精确对齐语义级别的特征,易出现负迁移;训练复杂度高,实时性优化困难,边缘计算设备部署受限 | [ |
| 半监督领域自适应 | 少量目标域标签数据可校准模型,精度提升显著;通过标签监督降低跨域语义歧义,适用于目标域场景复杂度高的任务 | 需权衡标注成本与性能增益,标签依赖仍存在;相较无监督领域自适应(Unsupervised Domain Adaptation, UDA),训练流程更复杂,需额外设计标签筛选与质量控制机制 | [ |

Fig. 7
Example of embodied cognition task planning and execution
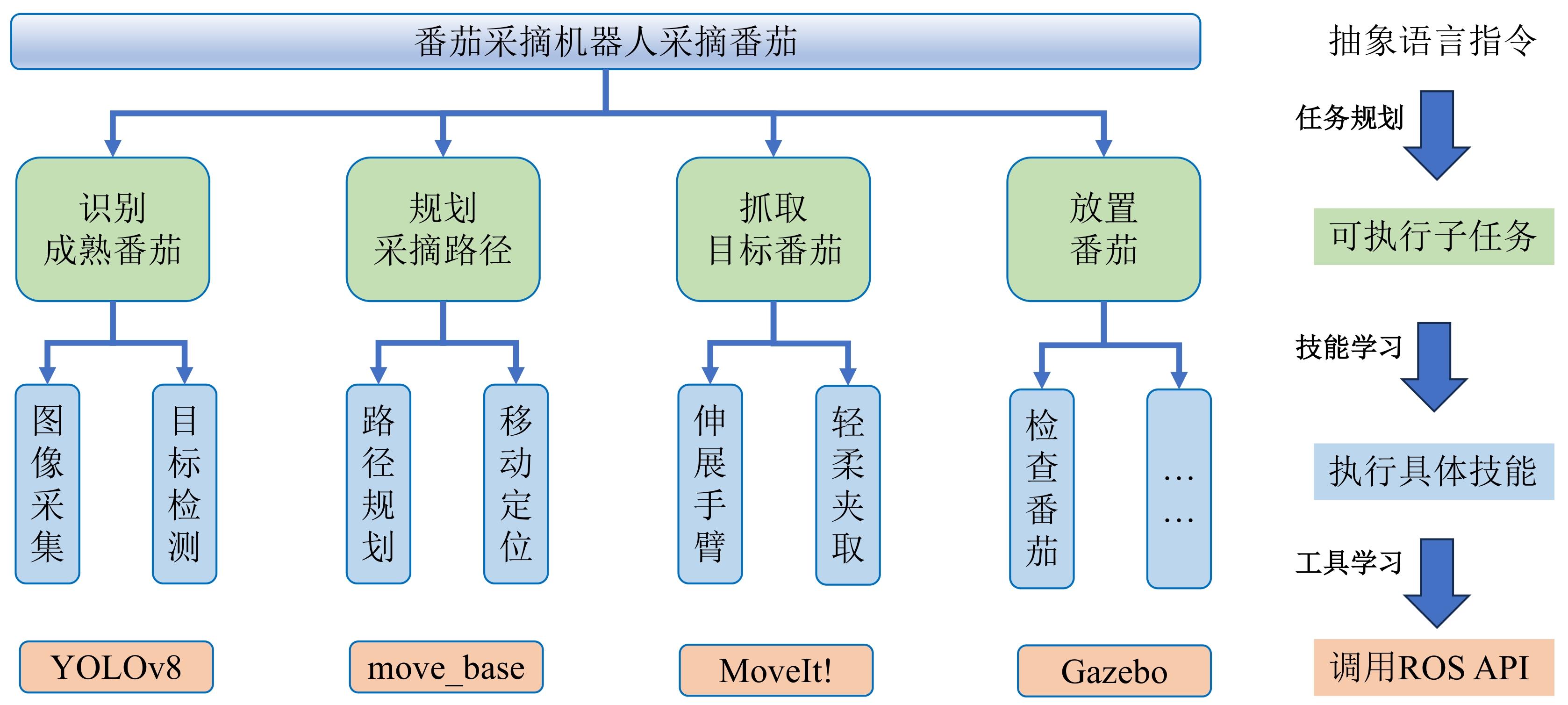
Table 2
Representative work in different technical directions of embodied cognition
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 基于规则驱动 | 有限状态机、专家系统 | 实现简单,控制逻辑明确;在结构化、稳定的作业场景中表现良好 | 灵活性不足,难以应对动态环境变化;规则需手动设计和频繁更新 | [ |
| 基于专家示范驱动 | 模仿学习、行为克隆、逆向强化学习 | 能直接借鉴专家经验;更好地适应复杂多变的作业环境;可从真实操作数据中学习 | 数据采集成本高,依赖专家示范数据质量;泛化能力可能受限于示范场景 | [ |
| 基于大模型驱动 | 视觉语言模型、多模态大模型、视觉行为编码器 | 泛化能力强,适应性更高;能融合多模态数据(视觉、传感器等);可通过在线学习不断优化 | 对数据和计算资源要求较高;模型复杂,解释性较差;调试与调优较为困难 | [ |
Table 3
Perform representative work in different technical directions
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 基于自然语言交互学习 | 基于大模型的机器人在线纠错框架、语言模型预测控制框架、多上下文模仿学习方法 | 支持人类实时语言指导,适应性强;能从语言中抽象通用规则,利于跨任务泛化;适用于动态环境中行为调整和快速纠偏 | 需依赖强大语言理解能力,受限于模型准确率;需将语言指令与环境状态有效绑定,复杂场景感知局限;性能受限于预训练大模型能力和算力成本 | [ |
| 基于视觉可供性学习 | 基于可供性预测网络的机器人控制框架、物体-物体的可供性学习框架 | 动作预测基于物理交互可行性,精准可控;无需显示符号表示,视觉到动作一体化,物理约束融合强,适用于抓取、移动操作任务 | 标注成本高,对未见场景/物体的适应性较差;易受限于感知精度与遮挡干扰;对任务意图和语义规则处理能力弱于语言驱动方法 | [ |
Table 4
Representative work in different technical directions of embodied evolution
| 技术方向 | 技术方法/工具 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| DERL | CGP、GA-DRL、Supe-RL | 形态-策略协同优化,可跳出局部最优,适应性强,适用于不确定、高动态环境 | 进化过程需要大量样本与仿真时间,虚拟环境中训练的策略与结构迁移到现实难度大 | [ |
| 虚拟仿真学习 | 格物、Genesis、Habitat | 数据获取低成本高效率,安全可控,适合极端或危险任务模拟,支持策略快速迭代与泛化检验 | 高质量仿真环境构建复杂,仿真现实差距导致迁移后性能下降 | [ |
| OCL | 正则化约束方法、经验回放机制、优化策略调整、表征解耦技术和动态架构扩展 | 支持动态环境适应,针对作物生长、天气变化等时变因素在线调整策略,适用于构建长期智能 | 新任务引入可能导致旧任务性能大幅下降,需平衡记忆成本、模型容量与计算开销,避免负迁移或干扰旧知识 | [ |
| [1] |
李道亮. 我国农业机器人技术与发展趋势[J]. 人民论坛, 2024(24): 70-74.
|
|
|
|
| [2] |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
|
|
|
|
| [3] |
何勇, 黄震宇, 杨宁远, 等. 设施农业机器人导航关键技术研究进展与展望[J]. 智慧农业(中英文), 2024, 6(5): 1-19.
|
|
|
|
| [4] |
卢策吾,王鹤. 具身智能(Embodied Artificial Intelligence)[EB/OL]. (2023-07-22)[2025-04-16].
|
| [5] |
张伟男, 刘挺. 具身智能的研究与应用[J]. 智能系统学报, 2025, 20(1): 255-262.
|
|
|
|
| [6] |
|
| [7] |
沈甜雨, 李志伟, 范丽丽, 等. 具身智能驾驶: 概念、方法、现状与展望[J]. 智能科学与技术学报, 2024, 6(1): 17-32.
|
|
|
|
| [8] |
李颂元, 朱祥维, 李玺. 基座模型技术背景下的具身智能体综述[J]. 浙江大学学报(工学版), 2025, 59(2): 213-226, 268.
|
|
|
|
| [9] |
|
| [10] |
李兴旭, 陈雯柏, 王一群, 等. 基于级联视觉检测的樱桃番茄自动采收系统设计与试验[J]. 农业工程学报, 2023, 39(1): 136-145.
|
|
|
|
| [11] |
中国信息通信研究院, 北京人形机器人创新有限公司. 具身智能发展报告(2024年)[R/OL]. [2025-04-16].
|
| [12] |
罗锡文, 廖娟, 胡炼, 等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报, 2021, 42(6): 8-17, 5.
|
|
|
|
| [13] |
万欢, 欧媛珍, 管宪鲁, 等. 无人农机作业环境感知技术综述[J]. 农业工程学报, 2024, 40(8): 1-18.
|
|
|
|
| [14] |
姜龙腾, 迟瑞娟, 马悦琦, 等. 基于栅格法的农业机器人路径规划方法研究[J]. 农机化研究, 2024, 46(6): 19-24.
|
|
|
|
| [15] |
蒋心璐, 陈天恩, 王聪, 等. 大田环境下的农业害虫图像小目标检测算法[J]. 计算机工程, 2024, 50(1): 232-241.
|
|
|
|
| [16] |
赵宁磊, 程曼, 袁洪波, 等. 羊舍自主巡检机器人设计与试验[J]. 中国农机化学报, 2025, 46(1): 78-84.
|
|
|
|
| [17] |
高金喆, 寇志伟, 孔哲, 等. 基于激光雷达的牧场巡检机器人定位与建图算法设计[J]. 中国农机化学报, 2024, 45(4): 222-230.
|
|
|
|
| [18] |
付辰伏, 任力生, 王芳. 自动化场景区分下FABF-YOLOv8s轻量化肉牛行为识别方法[J]. 农业工程学报, 2024, 40(15): 152-163.
|
|
|
|
| [19] |
许成果, 薛月菊, 郑婵, 等. 基于自注意力机制与无锚点的仔猪姿态识别[J]. 农业工程学报, 2022, 38(14): 166-173.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
汪小旵, 祁子涵, 杨震宇, 等. 基于DAV_DWA算法的农业机器人局部路径规划[J]. 农业机械学报, 2025, 56(2): 105-114.
|
|
|
|
| [26] |
董豪, 杨静, 李少波, 等. 基于深度强化学习的机器人运动控制研究进展[J]. 控制与决策, 2022, 37(2): 278-292.
|
|
|
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
AHN M,
|
| [37] |
|
| [38] |
|
| [39] |
李善军, 宋竹平, 梁千月, 等. 基于X-ray和RGB图像融合的实蝇侵染柑橘无损检测[J]. 农业机械学报, 2023, 54(1): 385-392.
|
|
|
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
卞立平, 吕滢, 罗智彬, 等. 基于区块链技术的食品溯源在元宇宙中的应用构想与设计[J]. 智能化农业装备学报(中英文), 2023(4): 11-19.
|
|
|
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
孙水发, 汤永恒, 王奔, 等. 动态场景的三维重建研究综述[J]. 计算机科学与探索, 2024, 18(4): 831-860.
|
|
|
|
| [56] |
蔡瑞初, 李嘉豪, 郝志峰. 基于类内最大均值差异的无监督领域自适应算法[J]. 计算机应用研究, 2020, 37(8): 2371-2375.
|
|
|
|
| [57] |
|
| [58] |
陶洋, 杨雯, 翁善, 等. 基于迁移子空间的半监督领域自适应方法[J]. 计算机工程与设计, 2021, 42(8): 2308-2315.
|
|
|
|
| [59] |
姚明海, 黄展聪. 基于主动学习的半监督领域自适应方法研究[J]. 高技术通讯, 2020, 30(8): 783-789.
|
|
|
|
| [60] |
|
| [61] |
温舒智, 彭丽莎, 刘杨博, 等. 基于有限状态机的管道自爬行机器人研制[J]. 制造业自动化, 2024, 46(9): 15-19, 214.
|
|
|
|
| [62] |
杨伟志, 孙道宗, 刘建梅, 等. 基于物联网和人工智能的柑橘灌溉专家系统[J]. 节水灌溉, 2019(9): 116-120, 124.
|
|
|
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [1] | QI Peiyang, SUN Chuanheng, TAN Changwei, WANG Jun, XING Bin. Vegetable IoT Blockchain Anti Counterfeiting Traceability System Based on PQ-ECIES [J]. Smart Agriculture, 2025, (): 1-14. |
| [2] | XU Jiping, LI Hui, WANG Haoyu, ZHOU Yan, WANG Zhaoyang, YU Chongchong. Collaborative Computing of Food Supply Chain Privacy Data Elements Based on Federated Learning [J]. Smart Agriculture, 2023, 5(4): 79-91. |
| [3] | YANG XuanJiang, LI Hualong, LI Miao, HU Zelin, LIAO Jianjun, LIU Xianwang, GUO Panpan, YUE Xudong. Beehive Key Parameters Online Monitoring System and Performance Test [J]. Smart Agriculture, 2020, 2(2): 115-125. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







