



1 引 言
中国是番茄生产和消费大国,种植面积达105万公顷[1],人均年消费量约21 kg[2]。近年来随着劳动力成本上涨,番茄种植管理的雇工费用已上涨至总生产成本比例约45%[3],人力成本过高已成为限制番茄种植效益增长的客观因素。鉴于机器人在智能探测和复杂操作方面的独特优势,针对温室番茄采摘、整枝、授粉以及喷药等劳动密集、操作复杂的种植管理环节,研发能够代替人工作业的农业机器人,是从工程技术角度应对当前形势的有效途径[4,5]。准确获取作业对象的视觉特征是机器人智能化作业的必要前提。对于不同管理环节,番茄植株茎、叶和果既可能是作业对象,也可能是背景干扰。然而温室内植株丛生密布、杂乱无序,且番茄茎、叶和绿果为相近色器官,基于宽泛的可见光图像信息,难以实现植株特定对象的准确识别。
鉴于植物茎、叶、果等不同器官的构成物质成分差异,根据其特定波段光谱特征进行分类和识别,是当前解决植物相近颜色目标视觉识别问题的有效途径[4]。光谱特征数据是目标光谱反射强度在频域分布情况的体现[6]。吴伟斌等[7]通过分析750~1000 nm波段柑橘叶片光谱反射率与其重叠层数的相关性,研究了重叠叶片面积测量方法。Ma等[8]根据692、705和743 nm波段光谱特征,对于豌豆角内部虫害信息进行识别。王海青等[9]以690~950 nm区间作为特征波段,对黄瓜、茎和叶光谱数据进行了分类。白敬等[10]选取710、755、950和595 nm作为探测油菜田间杂草的最优波段。由于单一的光谱特征数据缺少目标空间信息,难以作为视觉伺服控制依据,多用于病虫害、杂草种类和叶片密度等生物组织成分、生理特征分类。通过成像技术获得的光谱图像数据是目标光谱反射特征与其空间位置信息的综合体现,可作为机器人对目标识别和精准对靶作业的依据。Gan等[11]根据橘子彩色图像和热图像特征,对绿橘果实与叶片进行区域分割,准确率达到95.5%。Bac等[12]以甜椒植株447~900 nm区间内6个波段的图像为输入,建立二叉树分类模型,成功识别其茎、叶、果像素。Li等[13]和袁挺等[14]根据黄瓜与叶片在800 nm波段图像的亮度差异,研究了丛生叶片背景下黄瓜果实的识别算法,识别准确率达到95%。然而当前基于光谱特征图像对目标识别分类方法中,主要以目标最强反射波段作为成像波段,仅强调突出目标区域图像亮度,缺少对背景弱反射波段图像的融合,无法充分达到凸显强反射目标、淡化弱反射背景干扰的目的。
针对温室番茄茎、叶和绿果等相近色目标视觉识别难题,本研究根据其各自光谱特性差异筛选最优成像波段,构建多波段图像采集系统,并结合不同波段图像特征,提出多波段图像融合方法,以充分凸显目标与背景差异,提高相近色系目标识别效率。本研究可为温室番茄采摘、整枝和授粉等智能化管理作业的视觉信息获取提供技术支撑。
2 番茄相近色器官光谱特性分析
2.1 茎、叶、果光谱特性测量
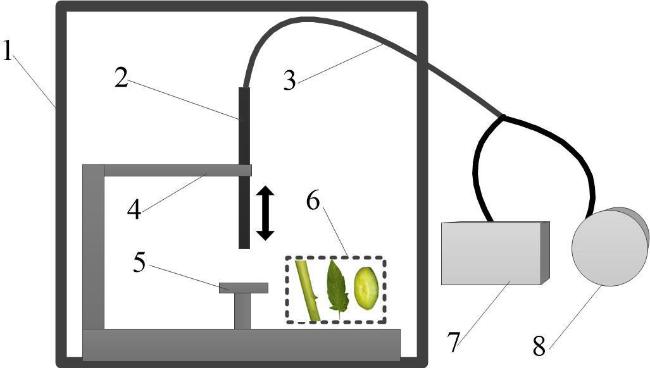
鉴于当前主流工业摄像机的敏感波段为300~1000 nm,本研究重点针对该波段区间内番茄茎、叶、果的反射光谱特征进行采集和分析。如图1 所示光谱数据采集系统,其中光谱信息采集单元选用Ocean Optics公司QE65 Pro光谱仪,其测量光谱范围为185~1100 nm,分辨率为0.8 nm,搭配Ocean Optics公司HL-2000型卤钨光源作为辐射源,其光谱范围360~2400 nm。采集系统安装于暗箱内,以减少外界杂光干扰。测量过程中通过光纤探头支架调节探头安装高度,其与被测对象保持恒定距离,克服探测距离差异引起的光谱反射强度测量误差。
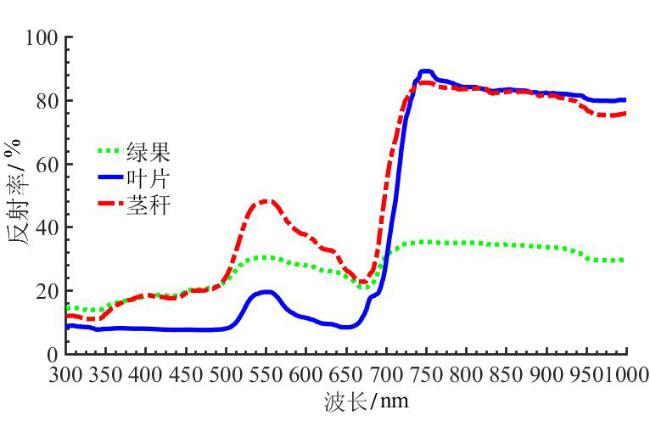
以中国北方广泛种植的“佳丽”品系番茄为研究对象,其温室内生长高度约2~3 m。从不同植株的不同高度位置随机采集茎秆、叶片、绿果(绿熟期)各50组作为测量样本。鉴于测量对象为非均匀构造,其表面形态、成分和纹理呈不规则特征,因此对每个样本采集光谱数据各5次,取其平均值为单个样本的光谱测定数据。对各类样本光谱数据进行滤波去噪、求均值处理,得到番茄植株茎、叶和绿果的光谱特性曲线,如图2 所示。
2.2 基于LR-Lasso的最优成像波段选择
量化描述不同波段对于区别番茄相近色系器官的重要性,是获得最优成像波段的必要前提。以番茄茎、叶和绿果样本的光谱特性测量结果为数据集,针对3类样本的二分类逻辑回归模型(Logistic Regression,LR)表示为式(1) 。
其中,样本 的特征集 由离散波长 对应光谱反射率 构成,其类别属性 ,决定于模型输出值 。波长 的加权系数为 ,不同波段的权值系数构成分类模型的权值向量 , 越大,则波段 对于识别样本分类的贡献越大。
基于Lasso正则化的稀疏解特征[15],求解Lasso正则化逻辑回归模型(LR-Lasso),可以获得有限数量波长对相近色样本分类重要性的定量描述,其包含Lasso正则项的损失函数可表示为式(2) 。
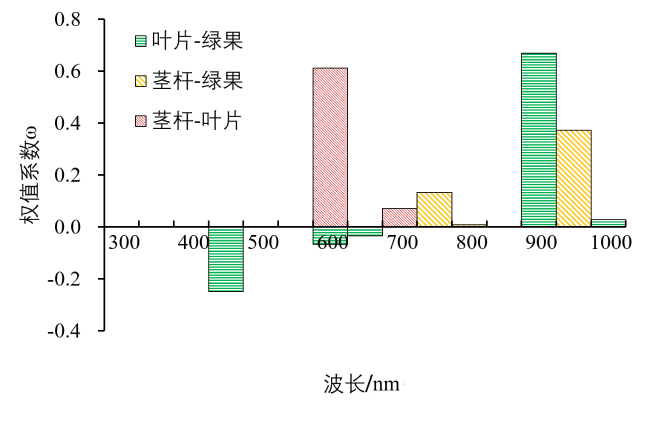
由于目前通用滤光片的带宽精度约±20 nm,本研究以50 nm为采样间隔,从番茄茎秆、叶片、绿果等3类样本光谱数据中分别提取15个波段的50组数据,分别求解区分叶片-绿果、茎秆-绿果以及茎秆-叶片的LR-Lasso判别模型,所得3个模型对应的 统计如图3 所示。根据权值系数值 大小,选择450、600、900和950 nm等4个波段,作为番茄茎、叶和绿果相近色器官的最优成像波段。
3 温室番茄植株图像在线采集
3.1 多波段图像采集系统
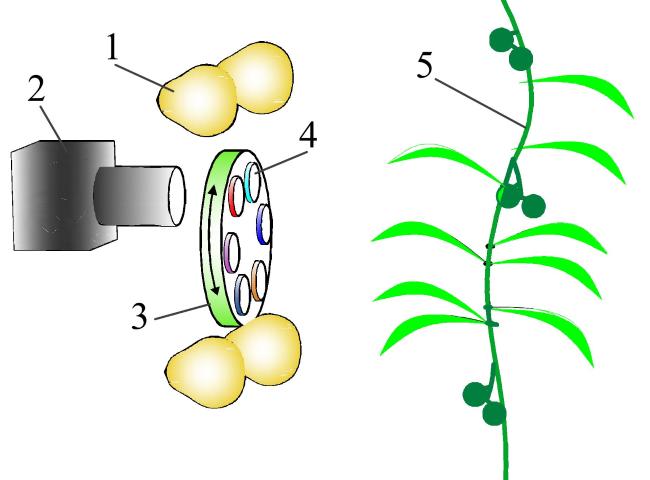
为了获取番茄植株相近色器官在最优成像波段区间成像信息,设计了多波段图像采集视觉系统,如图4 所示。选用acA1300-60 gmNIR摄像机(Basler公司)为成像单元,其敏感波段为300~1000 nm。摄像机镜头前加装±20 nm带通滤光片(浙江光益科技),其中心波长与选定的成像波段相对应,分别为450、600、900以及950 nm,带宽±20 nm。滤光片呈圆周阵列分别安装于Edmund 56-658型滤光片转轮内。通过旋转转轮可以切换摄像机镜头前的滤光片,以采集不同波段的图像。光源选用200 W卤素灯,在摄像机视场形成5000 lx辐射强度,以克服实验环境光照波动的影响。
3.2 图像灰度补偿矫正
由于在同一光源辐射环境下,不同波段的光照强度各不相同,且摄像机成像芯片对不同波段的敏感程度也不同,为了使得图像亮度与目标光谱反射强度相对应,需要采集的不同波段图像进行亮度矫正[17]。本研究利用D65(白色)标准色板作为参照,近似认为其对各成像波段具有相同的反射特性。标准色板可由机械装置推送进入靠近番茄植株的摄像机视场特定位置。通过触发采集方式,摄像机对于同一波段下番茄植株和标准色板各采集一幅图像,且采集过程中摄像机曝光参数保持不变。鉴于摄像机在可见光波段具有较强感光性能,以600 nm图像中色板灰度 为参考亮度。设波段 图像内色板的灰度为 ,则该波段图像亮度的增益系数 。对波段的番茄植株图像灰度用系数 进行线性矫正[18],则认为矫正后图像亮度与成像物体自身反射特性精确对应。
4 多波段图像融合
4.1 相近色目标多波段图像特征分析
对同一视场区域的番茄植株,采用上述多波段图像采集系统获取4幅不同波段的图像,如图5 所示。其视场大小为300 mm×300 mm,分辨率为350×350像素。图像中主要包括番茄茎秆、叶片、绿果,以及植株间隙透过的高亮光斑等4类像素区域。
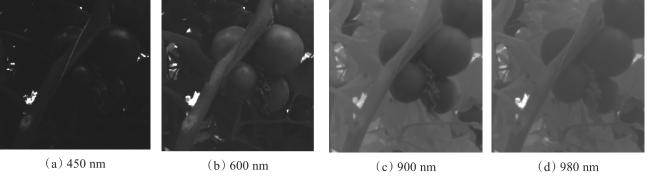
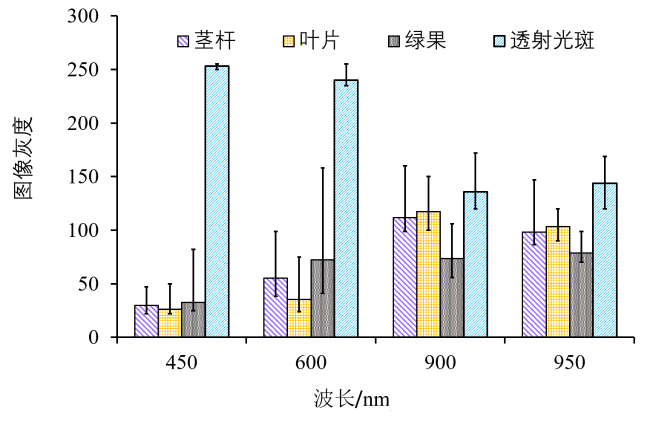
为验证各类像素区域图像特征与其光谱特性的对应关系,分别在4个波段图像中的4类目标像素区域取500像素,其像素灰度平均值、灰度值区间分别统计如图6 所示,其中柱的高度表示像素平均灰度、上下误差线表示灰度最大和最小值。由统计结果可得,番茄茎、叶和果的图像区域亮度随着成像波长增加而增加,即在长波区域植株反射的强度更大,与图2 中光谱反射强度曲线变化趋势相符合。在450和600 nm波段绿果亮度大于叶片,在900 nm波段则情况相反。由于茎杆反射率有较大(图2 ),其在各个波段图像中亮度均保持相对突出。此外,在600 nm波段植株果实表面的镜面反射,使得其图像亮度波动范围较大。此外,透射的太阳光在短波图像中形成了明显光斑区域,在长波图像区域亮度却不明显。由于900和950 nm图像亮度特征相似,为了提高数据处理效率,在图像融合算法中仅对450、600和900 nm波段图像数据进行处理。
4.2 基于NSGA-II算法的图像加权融合
对多波段图像数据的融合的目的在于使得目标像素区域从多样背景中凸显,并保持非目标背景区域亮度均衡,以降低目标区域分割难度。设i=1,2,3,4分别表示图像中茎秆、叶片、果实和高亮光斑等4类区域,其各自在最优成像波段 图像的像素亮度为 ,最终通过加权 系数融合形成的图像亮度可表示为Ii,各变量存在式(3) 所示关系。
若以4类区域中某一类区域作为目标区域,则其余3类都为背景区域。期望融合后图像中目标区域与背景区域像素亮度方差达到最大,且背景区域亮度波动最小,即认为实现了对目标像素区域的充分凸显。该图像融合预期可表示为多目标优化问题,如式(4) 所示,其中 和 分别为包含目标区域和不包含目标区域的图像亮度方差, 和 为相应图像区域的平均灰度, 和 为相应图像像素数量。
对式(4) 中多目标优化方程,采用非支配排序遗传算法(NSGA-II)[19]进行求解。NSGA-II是一种采用快速非支配排序和精英机制解决多目标优化问题的遗传算法方法,其实现步骤如下:①取 分别为不同波段图像对应融合加权初始值,对各个系数附加随机数 ,生成融合系数初始种群,并对初始种群进行快速非支配排序;②对初始种群执行二元选择、交叉和变异,得到新的种群;③新的种群与初始合并为新种群,对所有个体进行非支配排序以及非支配集内的拥挤度计算;④生成适当数量的一代种群时,优先选取非支配等级低的个体,当处于同一等级时,优先选取拥挤距离排序高的个体,以保证个体多样性;⑤若满足进化代数达到200,则停止算法,以当代种群为最优Parreto解集。否则,转至步骤②继续循环。
5 试验与结果分析
5.1 试验方案
为验证多波段图像融合算法效果,采集20个场景下番茄植株450、600和900 nm等3个最优成像波段共计60幅图像作为数据集,并由人工采用Adobe Photoshop软件标记每幅图像中茎杆、叶片和绿果区域,分别以茎秆、叶片和绿果为预期凸显目标,采用NSGA-II优化算法计算3个波段图像的最优融合加权系数。将融合所得图像数据进行均衡化处理[20],并映射为灰度范围(0—255)的图像,作为最终融合结果。
为了对图像融合结果进行量化表示,以图像灰度差异绝对差值之和(Sum of Absolute Difference,SAD)为指标,对单一成像波段图像和多波段融合图像内的各个相近色目标之间的亮度差异进行评价,其值越大表示两个区域的亮度差异越明显。图像灰度绝对差值和 可表示为公式(5) ,其中 和 表示图像中两个不同的子区域,包含像素数均为 , 和 分别为子区域内像素 的灰度值。
在此基础上,采用Otsu自动阈值分割算法[21]对融合图像进行阈值分割,根据目标区域像素的有效识别比例,对图像融合效果进行评估。
5.2 试验结果与分析
以上述数据样本分别以茎秆、叶片和绿果为凸显目标,训练NSGA-II优化模型,得到3组图像融合系数。以此对图5 中450、600和900 nm图像进行融合,得到融合结果和相应融合系数如图7 所示。

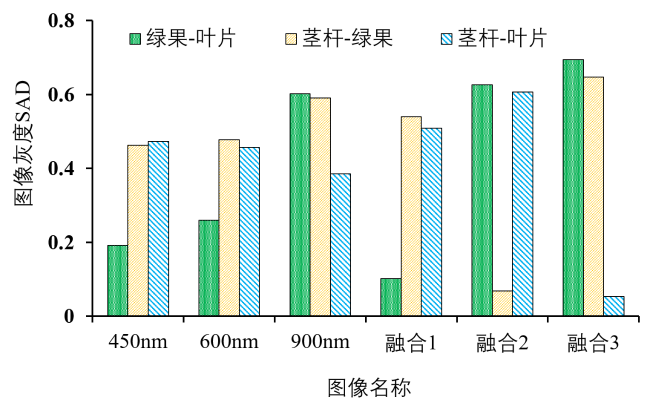
观察融合结果图7 可知,针对番茄茎、叶、绿果特定目标进行多波段图像融合处理后,其与相近色背景目标的像素亮度均呈现明显差异。在原始最优成像波段和融合结果图像中,茎秆、叶片和绿果区域分别选取500个像素,计算绿果-叶片、茎杆-绿果以及茎杆-叶片之间的灰度差异SAD如图8 所示,其中融合1、2和3分别表示以茎杆、叶片和绿果为凸显目标的融合图像。以融合1为例,与原始图像相比,其内部茎杆目标与背景(叶片和绿果)之间的SAD增加、背景叶片-绿果之间SAD减少,即融合后目标茎杆与背景之间差异增加、背景中两类物体的差异减小。若以目标-背景与背景-背景SAD比值 表示相近色目标与背景的综合相对差异,融合1、2和3中的 分别为4.98、8.84和12.11,分别是单波段图像中最大值的2.02倍(相比450 nm图像)、8.63倍(相比450 nm图像)和7.89倍(相比900 nm图像)。
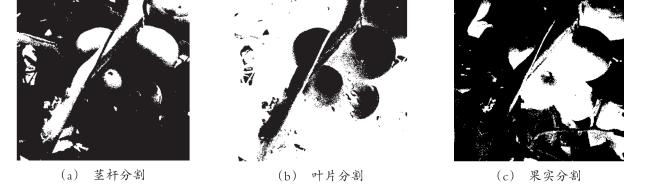
采用Otsu自动阈值分割算法[18]对融合图像进行阈值分割,所得二值图像如图9 所示,其融合图像中茎杆、叶片和果实像素的识别准确率分别为71.14%、60.32%和98.32%。可见多波段图像融合后,通过常规自动分割算法可以将相近色目标主要区域从背景中分割出来。尽管如此,针对茎秆和果实的分割结果显示,果实表面的镜面反射区域成为主要的错误分割区域,因此克服表面光滑的番茄果实表面镜面反射,以改善目标成像效果,是进一步研究的重点工作。
6 结 论
为了实现温室番茄植株茎秆、叶片和绿果等3类相近色目标的视觉识别,本研究提出了多波段图像在线采集和融合方法,以凸显目标与背景图像亮度差异。基于Lasso正则化逻辑回归模型的稀疏解特征,对茎、叶、绿果300~1000 nm波段光谱数据进行特征提取,确定了450、600和900 nm为最优成像波段。由多波段图像在线采集系统获得的相近色目标图像亮度的相对关系,与其光谱反射强度保持一致。基于NSGA-II多目标优化算法,获得对3个最优成像波段图像加权融合系数。以茎秆、叶片和绿果为目标,其融合图像中目标-背景灰度SAD和背景-背景灰度SAD比值分别是单波段图像的2.02、8.63和7.89倍。因此,多波段图像融合可显著提高相近色目标和背景亮度差异并有效抑制背景物体的亮度波动。






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}